Результат интеллектуальной деятельности: УСТРОЙСТВО ЗАЩИТЫ ШАХТНЫХ ПОДЪЕМНЫХ УСТАНОВОК ОТ ПРОСКАЛЬЗЫВАНИЯ КАНАТА
Вид РИД
Изобретение
Изобретение относится к области шахтных подъемных машин, в частности к устройствам защиты подъемных установок от проскальзывания каната по ведущим шкивам трения (многоканатным и одноканатным).
Известно прижимное устройство канатов ведущего шкива подъемной машины, состоящее из бесконечной резинотросовой ленты, барабанов с натяжными грузами и направляющими, которые прижимают ведущие канаты к футеровке шкивов трения, увеличивая при этом силу трения между канатами и футеровкой, а также угол обхвата шкива канатами [А.с. №506566].
Указанному устройству присущи следующие недостатки.
Резинотросовая лента будет прижимать канат к футеровке только в том случае, если он находится выше футеровки, поэтому для поддержания устройства в рабочем состоянии потребуется частая замена футеровки. Для создания необходимого давления ленты требуется подвешивать значительный груз.
Наиболее близким к предлагаемому устройству по технической сущности и достигаемому результату решением является устройство защиты подъемных установок от проскальзывания каната, представляющее собой узел торможения канатов, состоящий из неподвижных брусьев с фрикционными накладками, неподвижным упором со скосами, подвижного заклинивающего элемента с фрикционными накладками, пружинно- гидравлическим приводом, рычажным устройством, телескопической направляющей, трубопроводом для воздуха, промежуточного реле, автоматического быстродействующего выключателя и электропневматического клапана (см. А.с. №737340). При проскальзывании канатов по шкиву трения защита приводит к отключению подъемного двигателя постоянного тока путем срабатывания выключателя автоматического быстродействующего и наложения предохранительного тормоза с выпуском воздуха из цилиндра предохранительного тормоза с помощью электропневматических клапанов через трубопроводы. Недостатком устройства контроля является низкое быстродействие механической части. Время срабатывания устройства составляет 1,2…1,5 с.
Результатом низкого быстродействия могут быть тяжелые аварии, а именно: разрушение и выход из строя футеровки, неконтролируемое движение сосудов и разрушение армировки ствола, обрыв канатов и падение сосудов.
Задачей настоящего изобретения является повышение быстродействия и предупреждение аварийных ситуаций на ранних стадиях с целью минимизации последствий аварии.
Решение поставленной задачи достигается тем, что устройство защиты шахтных подъемных установок от проскальзывания каната содержит блок аварийного отключения механизма, включающий в себя промежуточное реле и выключатель автоматический быстродействующий, отключающий двигатель постоянного тока, дополнительно содержит измерительный блок, выполненный на базе шунта, включенного в цепь обмотки якоря электродвигателя, выход которого подключен к входам первого и второго блоков задержки, выход первого блока задержки подключен к входу блока контроля проскальзывания на участке разгона, выход которого в свою очередь подключен ко входу блока аварийного отключения механизма, выход второго блока задержки подключен к входу блока контроля проскальзывания на участке установившейся скорости, выход которого подключен к входу блока индикации нормального режима работы, выход которого в свою очередь подключен к входу блока регистрации аварийного режима, выход которого подключен ко входу блока аварийного отключения механизма.
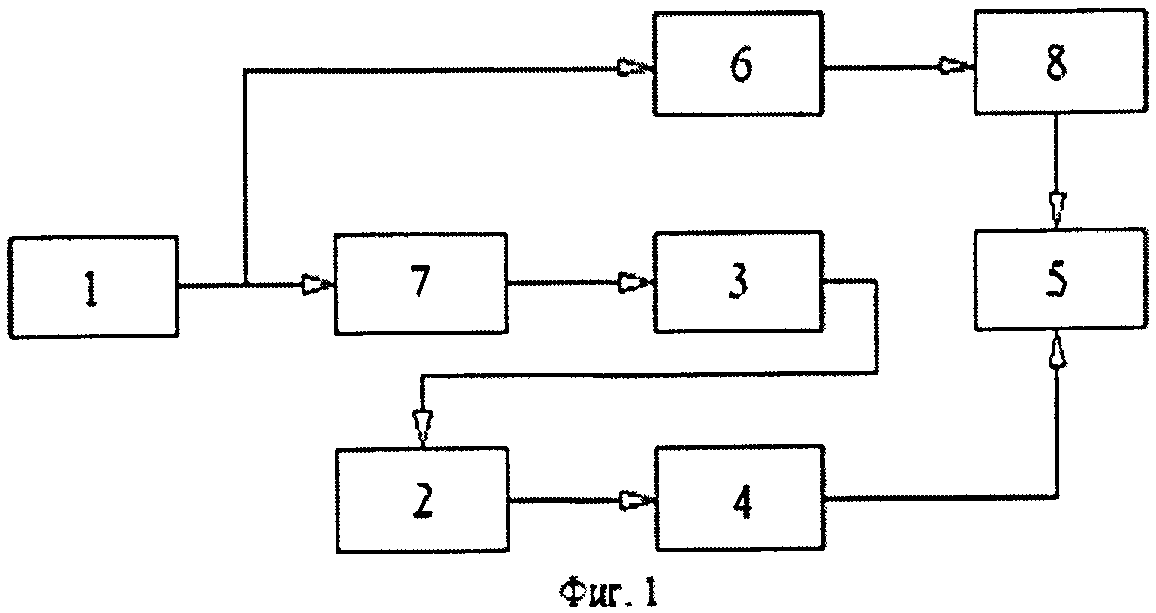
На фиг.1 приведена принципиальная схема заявленного устройства защиты шахтных подъемных установок от проскальзывания каната; на фиг.2 - временные циклограммы работы блоков, входящих в устройство.
Устройство защиты шахтных подъемных установок от проскальзывания каната (фиг.1) содержит измерительный блок 1, блок 2 индикации нормального режима работы, блок 3 контроля проскальзывания на участке установившейся скорости, блок 4 регистрации аварийного режима, блок 5 аварийного отключения, первый блок 6 задержки, второй блок 7 задержки, блок 8 контроля проскальзывания на участке разгона.
Измерительный блок 1 выполнен на базе токоизмерительного шунта, операционного усилителя и диодного моста, RC - цепи, предназначенной для фильтрования низких частот. Во втором блоке 7 задержки и первом блоке 6 задержки реализованы операции вычитания. Блоки реализованы на базе суммирующих усилителей и усилителя перемены знака. Блок 3 контроля проскальзывания на участке установившейся скорости включает в себя два операционных усилителя, служащих для установки нижнего и верхнего значений тока при помощи регулируемых сопротивлений; далее установлен логический элемент «И-НЕ», за ним установлена диодная развязка, служащая для индикации события «отклонение значения». Далее установлен блок 2 индикации нормального режима работы, выполненный на базе транзисторов и светодиода, служащего индикацией режима «работа». Блок 4 регистрации аварийного режима, выполненный на базе операционного усилителя, шунтированного RC - цепью для фильтрации низких частот, и светодиода, отображающего режим «Превышения значения». Блок 5 аварийного отключения механизма выполнен с использованием транзисторов, которые управляют катушкой реле, при помощи которого происходит срабатывание выключателя автоматического быстродействующего и отключается питание двигателя. При этом загорается индикация, фиксирующая режим «авария». Блок 8 контроля проскальзывания на участке разгона выполнен на базе операционного усилителя и регулируемого сопротивления, устанавливающего величину аварийного значения пускового тока, при которой происходит срабатывание операционного усилителя.
На фиг.2 (а-д) показаны: а - угловая скорость вращения двигателя; б - ток якоря двигателя постоянного тока; в - исходный сигнал управления двигателем, имеющий два состояния («Пуск», «Остановка»); г - выход первого блока 6 задержки; д - выход второго блока 7 задержки.
Устройство защиты подъемных установок от проскальзывания каната работает следующим образом.
В момент пуска механизма посредством релейной схемы из измерительного блока 1 подается информационный сигнал на первый 6 и второй 7 блоки задержки. С первого блока 6 задержки сигнал подается на вход блока 8 контроля проскальзывания на участке разгона, а со второго блока 7 задержки на вход блока 3 контроля проскальзывания на участке установившейся скорости и далее вход блока 2 индикации нормального режима работы, с выхода которого подается на вход блока 4 регистрации аварийного режима, выходной сигнал которого приходит на вход блока 5 аварийного отключения механизма.
В блоке 8 контроля проскальзывания на участке разгона реализуется следующая логическая функция:
где х(τ)- выходной сигнал блока 8 контроля проскальзывания на участке разгона, имеющий два уровня Откл. и Раб.;
Δ1 - величина текущего значения тока на участке разгона;
Δ2 - величина допустимого значения тока на участке разгона;
Δ3 - величина допустимого отклонения значения тока на участке разгона.
Если разность величин (Δ1-Δ2) больше, чем сигнал Δ3, то сигнал с выхода блока 8 контроля проскальзывания на участке разгона поступает на вход блока 5 аварийного отключения механизма и двигатель останавливается. В противном случае сигнал не считается аварийным и работа продолжается.
На вход блока 3 контроля проскальзывания на участке установившейся скорости поступает сигнал со второго блока 7 задержки.
В блоке 3 контроля проскальзывания на участке установившейся скорости реализуется следующая логическая функция:

где y(τ) - выходной сигнал блока контроля проскальзывания на участке установившейся скорости;
Δ4 - величина текущего значения тока на участке установившейся скорости;
Δ - величина допустимого значения тока на участке установившейся скорости;
Δ* - величина допустимого отклонения значения тока в момент установившейся скорости.
Если разность величин (Δ-Δ4) будет больше Δ*, то с выхода блока 4 регистрации аварийного режима на вход блока 5 аварийного отключения механизма поступает сигнал отключения. А в случае, когда сумма величин (Δ-Δ4) будет приблизительно равна Δ*, сигнал считается неаварийным.
Включение системы в работу (условно принято за момент времени τ=0) происходит по сигналу (Пуск), показано на фиг.2в. Этот сигнал подается с местного пульта управления оператором подъемной установки.
На фиг.2а приведен график изменения угловой скорости вращения двигателя. Весь цикл работы состоит из трех участков:
1. Первый участок (τ=0÷τ1) - участок разгона, где двигатель движется с ускорением до момента τ1 набора номинальной скорости.
2. Второй участок - участок движения с равномерной скоростью.
3. Третий участок - участок торможения (после команды «Остановка»).
На фиг.2б приведен график изменения действующих значений тока якоря двигателя постоянного тока. Начиная с момента пуска (τ=0) протекает процесс разгона двигателя до установившейся скорости, который длится до момента времени τ1 (5-8с), после чего ток стабилизируется (также, как и скорость вращения).
Выходное напряжение U измерительного блока 1 пропорционально току двигателя
U=Iд*кт.ш*кд.т.,
где кт.ш - коэффициент шунта,
кд.т. - коэффициент схемы датчика тока.
График изменения выходного напряжения U повторяет динамику изменения действующих значений тока якоря Iд. Выход измерительного блока 1 является информационным входом устройства.
Информационный выход измерительного блока 1 подключен к входам первого 6 и второго 7 блоков задержки.
На фиг.2г, 2д приведены выходные сигналы первого блока 6 задержки и второго блока 7 задержки.
Появление аварийного сигнала обеспечивается последовательным срабатыванием четырех блоков при контроле проскальзывания на участке разгона и шести блоков при контроле проскальзывания на участке установившейся скорости. При собственном времени срабатывания аналоговых блоков 5*10-6-10-5 полное время срабатывания устройства будет определяться в основном собственным временем срабатывания блока 5 аварийного отключения механизма, составляющим 0,06-0,08 с и складывающимся из времени срабатывания реле (0,04-0,05 с) и выключателя автоматического быстродействующего (20 мс).
Таким образом, предлагаемое устройство позволяет распознать аварийную ситуацию проскальзывания каната на ранних стадиях и повысит быстродействие срабатывания защиты.
Устройство защиты шахтных подъемных установок от проскальзывания каната, содержащее блок аварийного отключения механизма, включающий в себя промежуточное реле и выключатель автоматический быстродействующий отключающий двигатель постоянного тока, отличающееся тем, что дополнительно содержит измерительный блок, выполненный на базе шунта, включенного в цепь обмотки якоря электродвигателя, выход которого подключен к входам первого и второго блоков задержки, выход первого блока задержки подключен к входу блока контроля проскальзывания на участке разгона, выход которого в свою очередь подключен ко входу блока аварийного отключения механизма, выход второго блока задержки подключен к входу блока контроля проскальзывания на участке установившейся скорости, выход которого подключен к входу блоку индикации нормального режима работы, выход которого в свою очередь подключен к входу блока регистрации аварийного режима, выход которого подключен ко входу блока аварийного отключения механизма.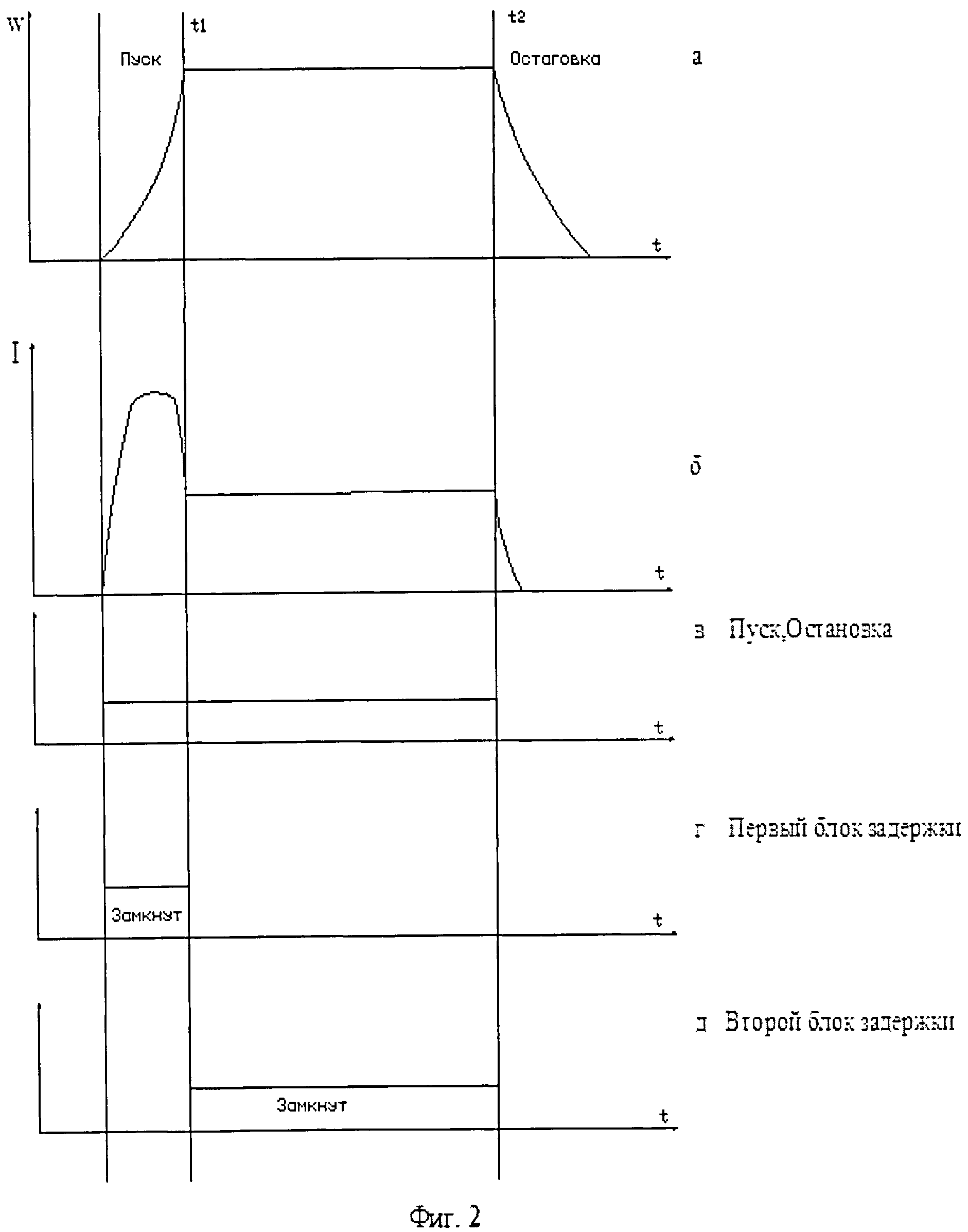
Устройство защиты конвейера при обрыве ленты
Порошковая проволока
Способ электровзрывного напыления композиционных износостойких покрытий системы tic-mo на поверхности трения
Порошковая проволока
Полноповоротный двухкривошипный плоский механизм с подвижным линейным гидроприводом
Трехподвижная кинематическая пара
Способ дробления в валковой дробилке
Способ утилизации химических продуктов пиролиза твердых топлив
Способ использования конвертерного газа для производства топлива
Роторное дробильное устройство
Способ разработки крутых пластов скважинной гидродобычей с попутной добычей метана
Трехщековая дробильная машина
Композиционный электрически взрываемый проводник для электровзрывного напыления покрытий или электровзрывного легирования поверхности металлов и сплавов
Устройство защиты конвейера при обрыве ленты
Пространственный смесительный механизм
Электромеханический кантователь прокатного стана
Керамический флюс-добавка
Боек цилиндроконический
Ударник бурильной машины
Боёк цилиндро-псевдосферический

