Результат интеллектуальной деятельности: СПОСОБ РЕГУЛИРОВАНИЯ
Вид РИД
Изобретение
Область техники
Изобретение относится к способу регулирования автоматической системы, применимому в частности к устройству регулирования напряжения статора в генераторе переменного тока.
Предшествующий уровень техники
Генераторы переменного тока, в частности генераторы большой мощности (несколько сотен мегаватт (МВт)), соединены с электрическими распределительными сетями, требования к которым меняются в широких пределах.
Эти генераторы подвержены помехам разного рода и величины: короткие замыкания, падения напряжения, колебания нагрузки, сброс нагрузки и т.д. Ожидается, что во всех случаях и во всем рабочем диапазоне их производительность будет наиболее близка к оптимальной. Замкнутые контуры должны также иметь значительный запас устойчивости.
Способы регулирования, используемые в настоящее время, в частности для синхронных генераторов переменного тока большой мощности для атомных электростанций, основаны на так называемом принципе четырехконтурного регулятора, контуры обратной связи которого используются для поддержания выходных значений как можно ближе к эталонным значениям, в частности, посредством управления определенным числом управляемых параметров.
Данные способы, основанные на аналоговых технологиях, очень чувствительны к ошибкам измерения и даже сравнительно неэффективны в обеспечении стабильности замкнутых циклов в широком диапазоне. В частности, в этих способах с замкнутым контуром генерируются колебания, которые трудно демпфировать и которые зачастую являются слабо демпфируемыми.
Эти способы регулирования и использующие их регуляторы не могут, в частности, удовлетворить требованиям технических спецификаций поставщиков электроэнергии в отношении устройства возбуждения и оборудования регулирования напряжения в синхронных генераторах переменного тока большой мощности для атомных электростанций во всем диапазоне их использования.
Краткое изложение сущности изобретения
Чтобы по меньшей мере частично устранить перечисленные выше недостатки, в изобретении предлагается способ автоматического регулирования системы, в котором измеряют множество параметрических характеристик системы и в котором по меньшей мере один параметр управления используют как функцию измеряемых параметров,
отличающийся тем, что содержит этапы, на которых:
- выбирают номинальную рабочую точку системы,
- определяют номинальную модель, описывающую систему в этой номинальной рабочей точке,
- определяют набор моделей, характеризующих возможные отклонения от номинальной модели,
- параметризуют отклонение от номинальной модели системы посредством разложения по всем отклонениям моделей из набора моделей, характеризующих возможные отклонения от номинальной модели,
- минимизируют заданный критерий оптимизации путем изменения по меньшей мере одного из полученных ранее параметров отклонения от номинальной модели.
Чувствительность полученного таким образом способа оптимизации снижена тем, что наличие набора моделей, характеризующих отклонения параметров, позволяет отойти от номинальной рабочей точки.
Данный способ также может иметь по меньшей мере одно или более из следующих свойств, отдельно или в сочетании.
Способ дополнительно включает в себя дополнительный этап оптимизации команды с отклонением для фиксированной номинальной модели посредством определения по меньшей мере одного коэффициента усиления обратной связи.
Этапы минимизации критерия оптимизации путем изменения параметров отклонения от номинальной модели системы и оптимизации команды с отклонением от фиксированной номинальной модели посредством определения по меньшей мере одного коэффициента обратной связи последовательно повторяют в цикле итерации.
Номинальная модель является приближением идеальной передаточной функции системы.
Номинальная модель является линеаризацией идеальной передаточной функции системы вблизи рабочей точки.
Упомянутый по меньшей мере один параметр управления системы, используемый как функция отклонений, определенный для уменьшения отклонения расчетных характеристических параметров от измеренных характеристических параметров, определяют применением оптимальной обратной связи к расширенной системе, полученной из исходной системы добавлением интеграла к измеряемому заданному параметру.
Используемый параметр управления системы определяют оптимизацией интегрального критерия.
Применяемый параметр управления системы определяют по линейно-квадратичному гауссовскому методу (ЛКГ) оптимального управления.
Способ дополнительно включает следующие этапы, на которых:
- из упомянутой номинальной модели определяют расчетные характеристические выходные параметры, соответствующие измеряемым характеристическим параметрам,
- определяют отклонения по меньшей мере одного из измеренных характеристических выходных параметров от соответствующего по меньшей мере одного из расчетных характеристических выходных параметров и
- применяют по меньшей мере один параметр управления системы как функцию отклонения, определенного для уменьшения отклонения по меньшей мере одного из расчетных характеристических параметров от соответствующего по меньшей мере одного измеренного значения измеренных характеристических выходных параметров.
Способ включает в себя дополнительный этап интегрирования разности между командой и ее предельным значением и оптимизацию команды с отклонением от номинальной модели, зафиксированным определением по меньшей мере одного коэффициента обратной связи, осуществляют использованием интеграла разности между командой и ее предельным значением.
Система включает в себя генератор переменного тока электростанции, соединенный с электрической сетью, и его устройство возбуждения.
Состояние системы представлено вектором состояния, включающим в себя напряжение статора, скорость вращения ротора, полный угол и распределение потока в устройстве возбуждения.
Набор выходных величин включает в себя напряжение статора, скорость вращения ротора, активную мощность и приблизительное значение механической мощности, моделирующей главное возмущение.
Упомянутый по меньшей мере один применяемый параметр управления включает в себя приближенное значение механической мощности, моделирующей главное возмущение, и напряжение управления устройством возбуждения.
Другим объектом изобретения является система автоматического регулирования, в которой измеряется множество параметрических характеристик системы, и в которой по меньшей мере один параметр управления используется как функция измеренных параметров,
отличающаяся тем, что она включает в себя средства, сконфигурированные с возможностью:
- выбора номинальной рабочей точки системы,
- определения номинальной модели, описывающей систему в этой номинальной рабочей точке,
- определения набора моделей, характеризующих возможные отклонения от номинальной модели,
- параметризации отклонения от номинальной модели системы посредством разложения по всем отклонениям моделей из набора моделей, характеризующих возможные отклонения, от номинальной модели,
- минимизации заданного критерия оптимизации путем изменения по меньшей мере одного из полученных ранее параметров отклонения от номинальной модели системы.
Краткое описание чертежей
Другие признаки и преимущества выявятся при изучении описания и следующих чертежей, на которых:
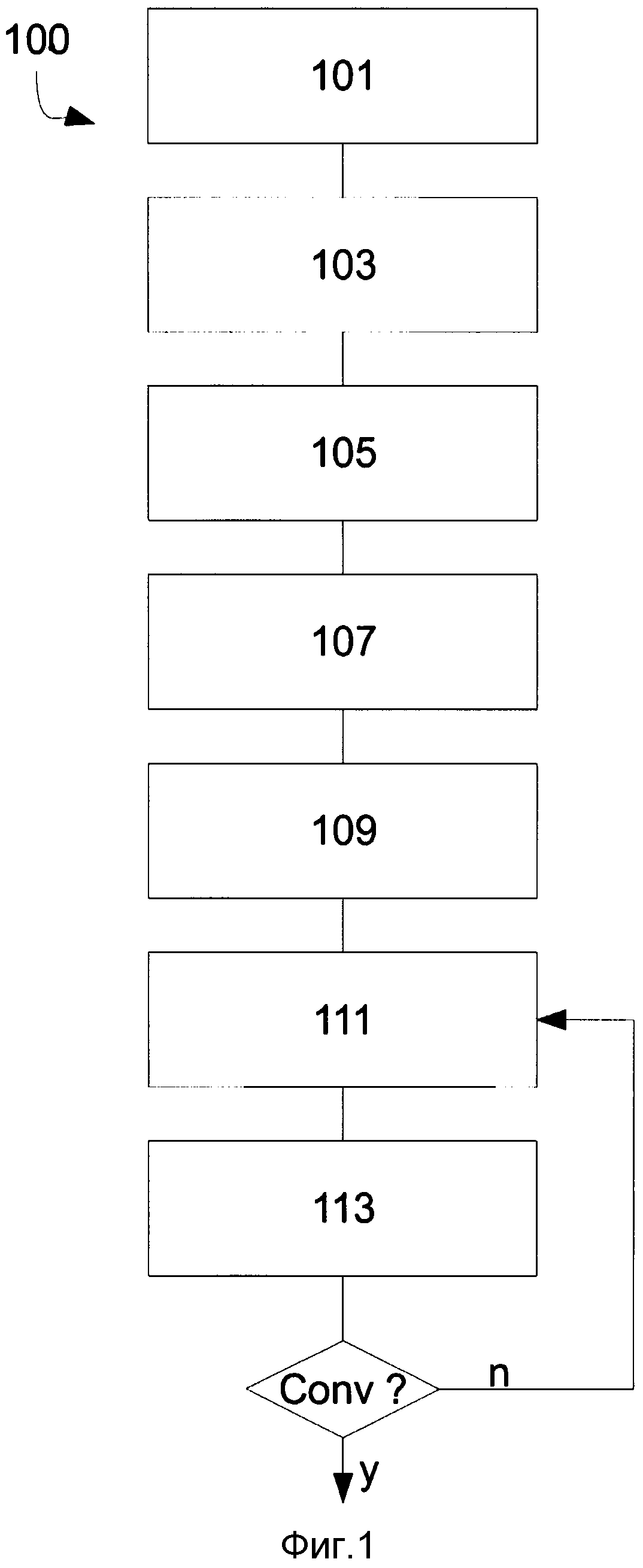
- фигура 1 представляет собой блок-схему этапов одного варианта осуществления способа,
- фигура 2 представляет собой блок-схему, показывающую один вариант осуществления так называемой номинальной модели системы,
- фигура 3 представляет собой блок-схему, показывающую один вариант осуществления так называемой "упреждающей" прогнозирующей функции,
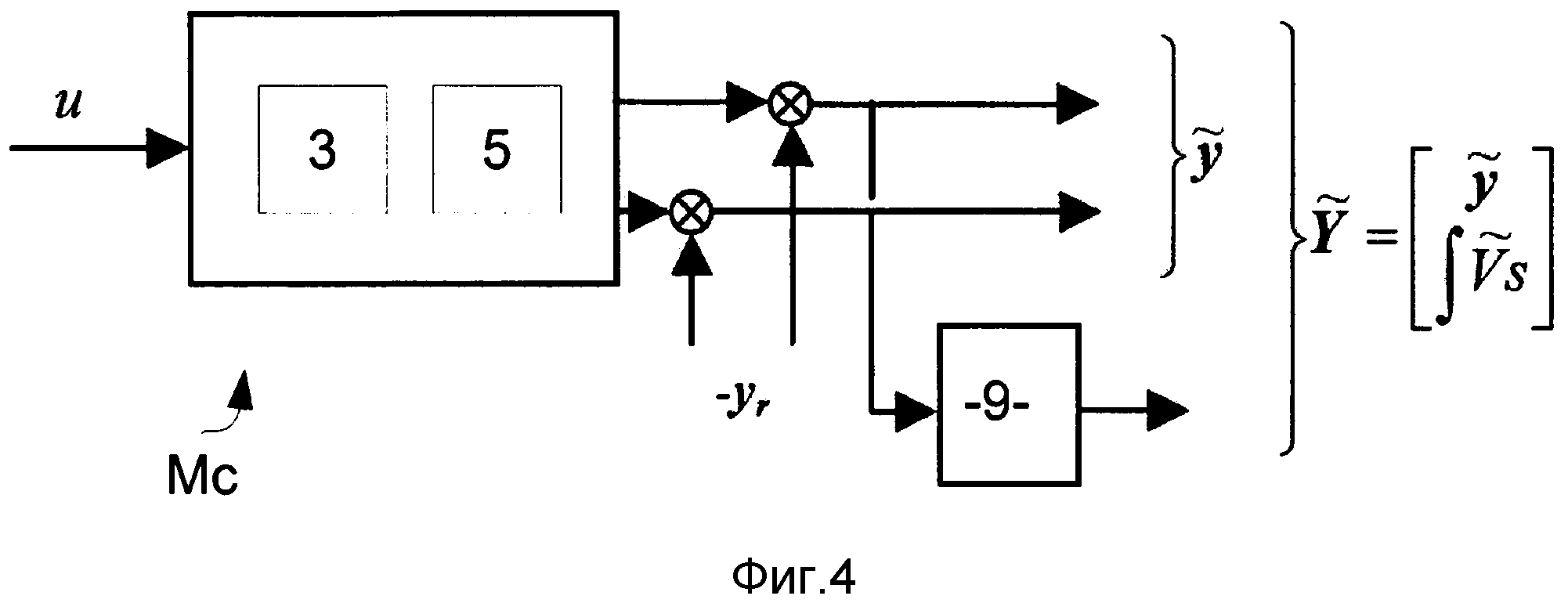
- фигура 4 представляет собой блок-схему, показывающую один вариант осуществления так называемой расчетной модели системы обратной связи,
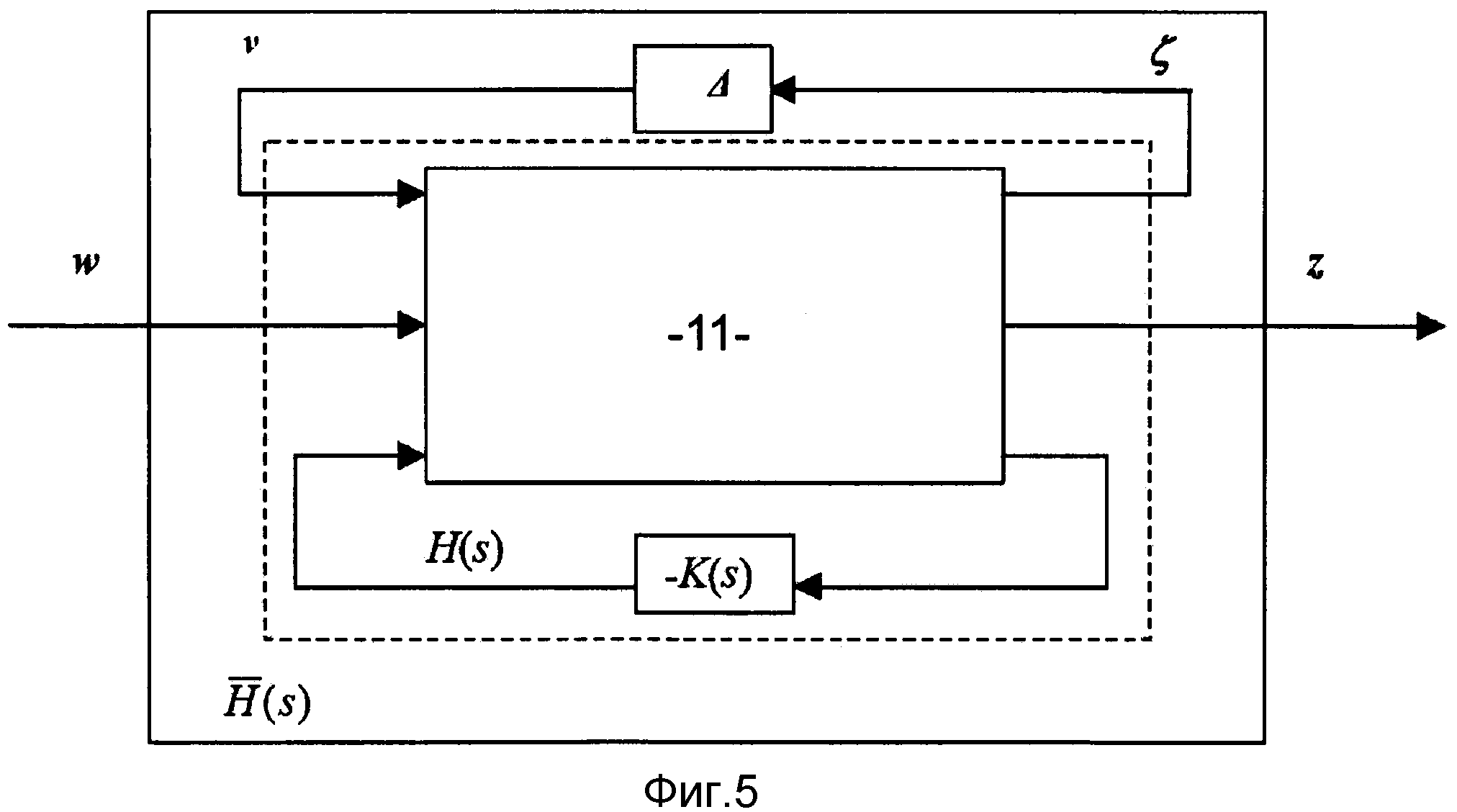
- фигура 5 представляет собой блок-схему, показывающую расширенную систему, используемую для снижения чувствительности, согласно изобретению,
- фигура 6 представляет собой блок-схему, показывающую упрощенную вторую версию расширенной системы с фигуры 5,
- фигура 7 представляет собой функциональную блок-схему, показывающую вариант осуществления, содержащий прогнозирующую функцию, обратную связь, снижение чувствительности и действие по насыщению управления.
Одинаковые ссылочные позиции относятся к одинаковым элементам на всех чертежах.
Описание предпочтительных вариантов воплощения
Изобретение относится к способу автоматического регулирования системы. Фигура 1 показывает разные этапы способа 100 регулирования системы. Способ применяется, в частности, в случае генератора переменного тока, соединенного с электрической сетью. Целью является приложить напряжение устройства возбуждения к генератору переменного тока так, чтобы гарантировать стабильность генератора переменного тока, отслеживая уставку напряжения. Данная уставка напряжения устанавливается так, чтобы отслеживать потребление от сети, с которой соединен генератор переменного тока.
Генератор переменного тока является, например, турбогенератором. Он содержит ротор, приводимый в действие турбиной, соединенной с реактором, и статор. Статор находится под определенным напряжением, называемым напряжением статора Vs.
Первым этапом 101 способа 100 является выбор номинальной модели Mn, которая может быть наиболее простой, линейной и инвариантной расчетной моделью. Эта номинальная модель может, в частности, представлять собой линеаризацию передаточной функции в заданной рабочей точке, в которой предполагается работа системы.
Моделирование процесса вблизи рабочей точки описывается следующим набором уравнений:
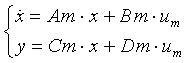
В приведенных выше уравнениях:
- x представляет собой вектор состояния, и в случае генератора переменного тока x = [Vs ω Θ efd]T, где Vs - напряжение статора, ω - скорость вращения, Θ - полный угол между напряжением сети и ЭДС, и efd - распределение магнитного потока в устройстве возбуждения,
- um представляет собой входной вектор, и в случае генератора переменного тока um = [u Pmec]T, где u - параметр управления и Pmec - механическая мощность, передаваемая ротору, который считается главным возмущением,
- y представляет собой выходной вектор, и в случае генератора переменного тока y = [Vs ω Pe Pmec]T, где Pe - подаваемая активная электрическая мощность.
Здесь запись [...]Т обозначает операцию транспонирования, векторы в формулах используются в виде векторов-столбцов.
Таким образом, модель характеризуется четырьмя матрицами Am, Bm, Cm, Dm.
Значения различных параметров выбираются для оптимального моделирования системы вблизи заданной рабочей точки. Эта рабочая точка, в общем, является той, вблизи которой разработчик желает иметь стабильность регулируемой системы. Например, в случае генератора переменного тока таковой является нормальная рабочая точка.
Матрицы Am, Bm, Cm и Dm выбирают инвариантными в контексте инвариантной линейной модели. В этой инвариантной линейной модели получают первую аппроксимацию, с которой легко работать, и моделируют систему вблизи рабочей точки в большей или меньшей окрестности, в зависимости от требуемого допуска. Эта модель обычно является линейной аппроксимацией первого порядка передаточной функции, описывающей реальную эволюцию системы.
Возможно, время или другие переменные параметры будут явно влиять на величины матриц Am, Bm, Cm и Dm. В этом случае, вычисления должны учитывать значения производных этих матриц. Это немедленно усложняет вычисления, в зависимости от формы временной зависимости, но в целом способ остается неизменным.
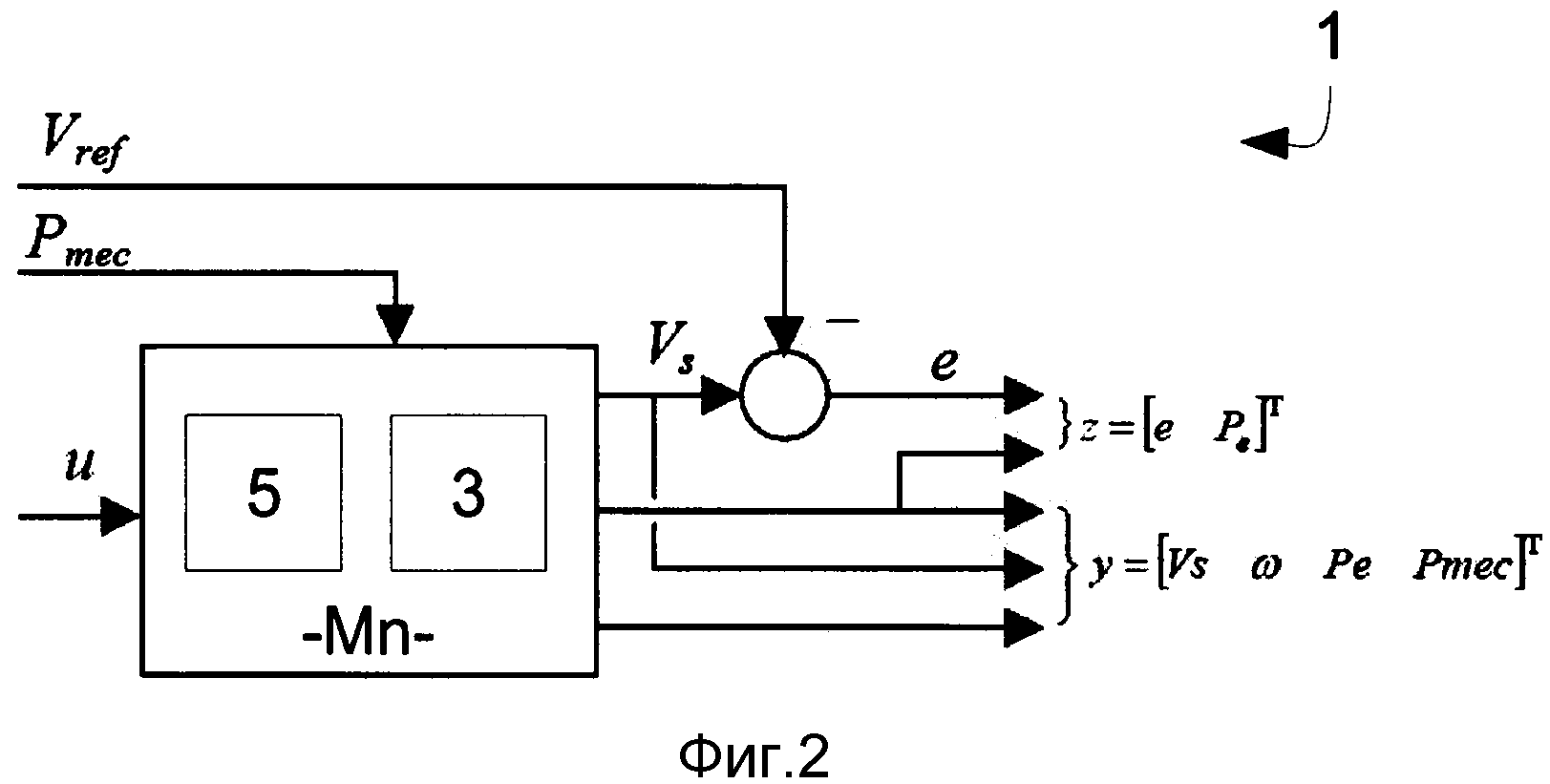
Фигура 2 показывает смоделированную таким образом систему в виде функциональной блок-схемы.
Центральным элементом этой функциональной блок-схемы 1 является номинальная модель Mn, содержащая генератор 3 переменного тока и устройство 5 возбуждения. Номинальная модель Mn принимает в качестве входных значений уставку Vref, параметр u управления и главное возмущение Pmec.
На выходе номинальной модели Mn получают набор выходных физических величин, включающий в себя напряжение статора Vs, из которого вычитается значение уставки Vref для получения отклонения e от уставки, электрическая мощность Pe и вектор y = [Vs ω Pe Pmec]T.
Значения e и Pe объединяются в вектор z = [e Pe]Т.
Возмущения в основном являются возмущениями известного рода и свойственны физической реализации электростанций и сетей, и в частности связаны с тем, что в электростанциях, как правило, используется определенное количество генераторов переменного тока, соединенных параллельно с различным числом линий и потребителей.
Можно отметить определенное количество соответствующих возмущений, включая:
- трехфазное короткое замыкание: напряжение в сети резко падает до нуля за короткий период времени, в результате единственной воспринимаемой реактивной составляющей становится реактивная составляющая трансформатора, после чего реактивная составляющая линии восстанавливается,
- просадка напряжения: похоже на короткое замыкание, за исключением среднего значения падения напряжения сети,
- падение нагрузки, следствие длительного короткого замыкания или просадки напряжения: генератор переменного тока отсоединен от всех частей сети; в крайнем случае он не обеспечивает другой мощности, кроме как для поддержания собственной работы,
- потеря соседнего набора: в случае нескольких параллельных генераторов переменного тока сбой или остановка соседнего генератора переменного тока (набора) может привести к недовозбуждению связанного с ним генератора переменного тока,
- потеря по меньшей мере одного соседнего набора при низком напряжении, ведущая к работе на пределе перевозбуждения: после остановки одного или более соседних наборов, связанный с ними генератор переменного тока переключается в режим ограничения тока, и
- падение частоты, вызванное потерей со стороны выдачи механической мощности, которое выражается в падении частоты порядка нескольких сотен мГц за несколько секунд.
Перечисленные выше возмущения типичны для реальной сети, и должна существовать возможность оценить их в масштабах времени, установленных в технических спецификациях.
На этапе 103 на фигуре 1 номинальная модель дополнена прогнозирующими моделями, выбранными для обнуления уставки и главного возмущения Pmec. Это показывает следующий набор уравнений:
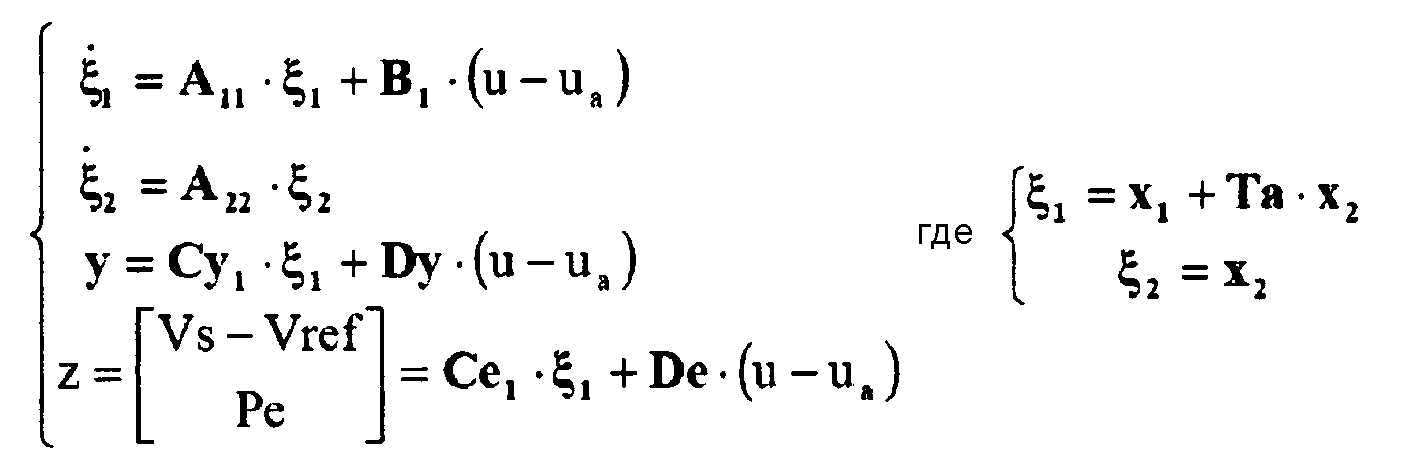
где A11=Am, A22=0, B1=Bm1, Cy1=Cm, De=Dy=0 и векторы x1=x, x2=[Vref Pmec]T и ua=-Ga·x2;
Bm1 является высшей подматрицей Bm подходящей размерности и Ga есть коэффициент, определяемый при решении известной задачи регулирования с внутренней стабильностью (PRIS), откуда следует форма приведенных выше уравнений. Тем не менее, этот коэффициент можно получить другими известными способами регулирования с обратной связью.
Расширенную модель затем используют на этапе 105 с фигуры 1 для реконструкции состояния процесса. Реконструкция состояния обычно основывается на операторе оценки, таком как фильтр Калмана. Здесь, напротив, она основана на используемой модели и измеренных величинах, реконструирующих состояние. Таким образом, способ использует номинальную модель, здесь - расчетную модель, для установления расчетных параметров, которые будут служить контрольными. Поэтому данная функция способа называется упреждающим (FFD) прогнозирующим действием в целях регулирования с упреждением, она осуществляется путем ввода опорных величин, в противоположность классической обратной связи.
Благодаря FFD можно обойтись без оценивания состояния. Более того, если все неизмеряемые величины включены в упомянутый вектор состояния, с ними не требуется производить дополнительных вычислений.
На этапе 107 с фигуры 1 применяется оптимальная обратная связь для выведения опорных параметров управления, позволяющих получать оптимальное отслеживание уставки в контексте номинальной модели. Линейная обратная связь в значительной степени осуществляется оптимизацией интегрального критерия, который в случае генератора переменного тока может быть таким:

где Sr и Rr - положительные весовые матрицы.
В частности, для осуществления такой оптимальной обратной связи можно использовать такой метод, как линейно-квадратичный гауссовский метод (ЛКГ).
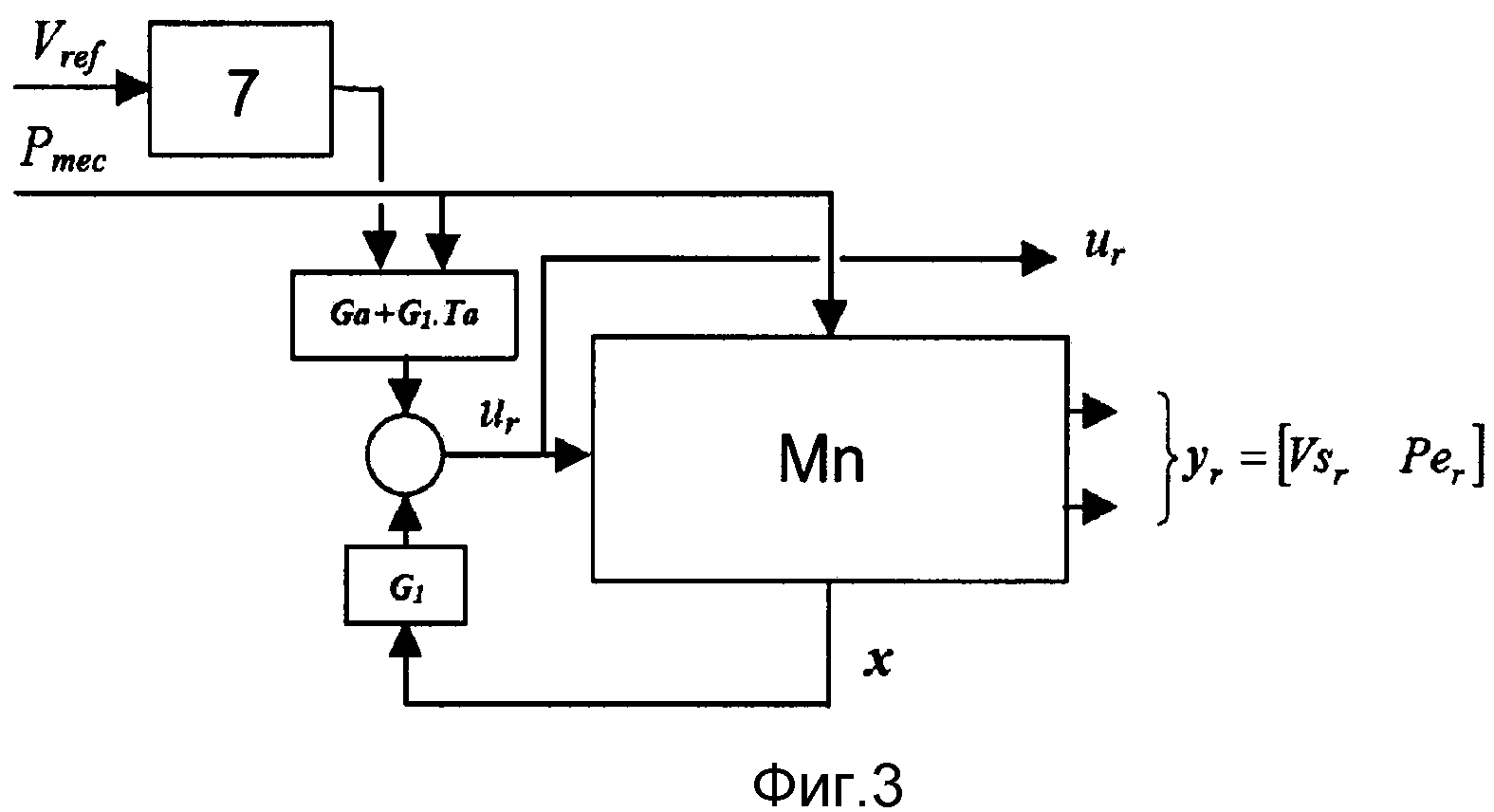
Фигура 3 показывает блок-схему системы с одним вариантом осуществления прогнозирующего контура FFD.
Центральным элементом блок-схемы с фигуры 3 является номинальная модель Mn.
Входными параметрами являются механическая мощность Pmec и уставка напряжения Vref. Уставка напряжения Vref фильтруется фильтром 7 первого порядка с известной постоянной времени Tref и, соответственно, передаточной функцией (1 + sTref)-1.
Опорная команда ur определяется из отфильтрованной уставки напряжения, механической мощности Pmec и состояния x системы. Эта опорная команда ur подается на блок Mn, который на выходе дает опорный выходной вектор yr. Опорный, или расчетный, вектор включает в себя, в случае генератора переменного тока, опорное напряжение статора Vsr и опорную электрическую мощность Per.
На выходе прогнозирующего контура получают набор расчетных опорных величин, состоящий из опорного оператора ur и опорного выходного вектора yr.
Из упомянутой фигуры 3 видно, что оптимальная обратная связь, используемая для получения опорного оператора, имеет вид [G1; Ga+G1.Ta]. Коэффициент G1 получают оптимизацией интегрального критерия на основе уровня команды Tr, используя один из обычных способов. Ga и Ta получены при классическом решении задачи PRIS, причем Ta является пределом интегрирования для определения Ga. Полный коэффициент используемой оптимальной обратной связи представляет собой сумму этих двух величин.
По меньшей мере один из параметров расчетных опорных величин ur и yr затем используется в обратной связи (ОС) для определения отклонения от номинальной модели. Для этого определяют отклонения по меньшей мере одного из измеренных характеристических выходных параметров y от по меньшей мере одного из расчетных характеристических выходных параметров yr и по меньшей мере один параметр команды u системы применяют или модифицируют как функцию отклонений, определенных для уменьшения отклонения расчетных характеристических параметров yr от измеренных значений измеряемых характеристических параметров y.
Для осуществления этой обратной связи (ОС) вначале определяют так называемую расчетную модель Mc, показанную на фигуре 4.
Центральным блоком этой диаграммы является блок, объединяющий генератор переменного тока 3 и устройство 5 возбуждения, на этот раз в их реальном виде. Этот блок принимает на вход реальный оператор u и дает на выходе выходную величину вектора y, из которого вычитается опорный выходной вектор yr для получения вектора  отклонений выходных значений от опорных. Этот вектор
отклонений выходных значений от опорных. Этот вектор  расширяют чтобы получить вектор
расширяют чтобы получить вектор  добавлением интегрального значения Vs-Vsr, дискретизацией Vs-Vsr и проведением через интегратор 9.
добавлением интегрального значения Vs-Vsr, дискретизацией Vs-Vsr и проведением через интегратор 9.
Стандартная модель, связанная с расширенным процессом, принимает вид:
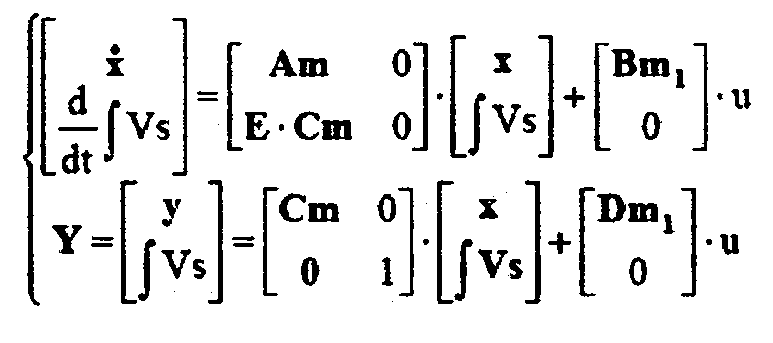
где E представляет собой матрицу, позволяющую выбрать выходной параметр, к которому должно будет применяться действие интегрирования.
Наконец, расчетную модель выбирают в рабочей точке процесса, которая может быть той же, что и для FFD.
Затем решают задачу оптимизации расчетной системы в рабочей точке.
Решение может использовать известный регулятор с двойным управлением типа ЛКГ с восстановлением передаточной функции контура.
Регулятор в таком случае имеет две отдельные функции: функцию реконструкции расширенного состояния интеграла выходного напряжения и оптимальной линейной обратной связи с реконструированным расширенным состоянием.
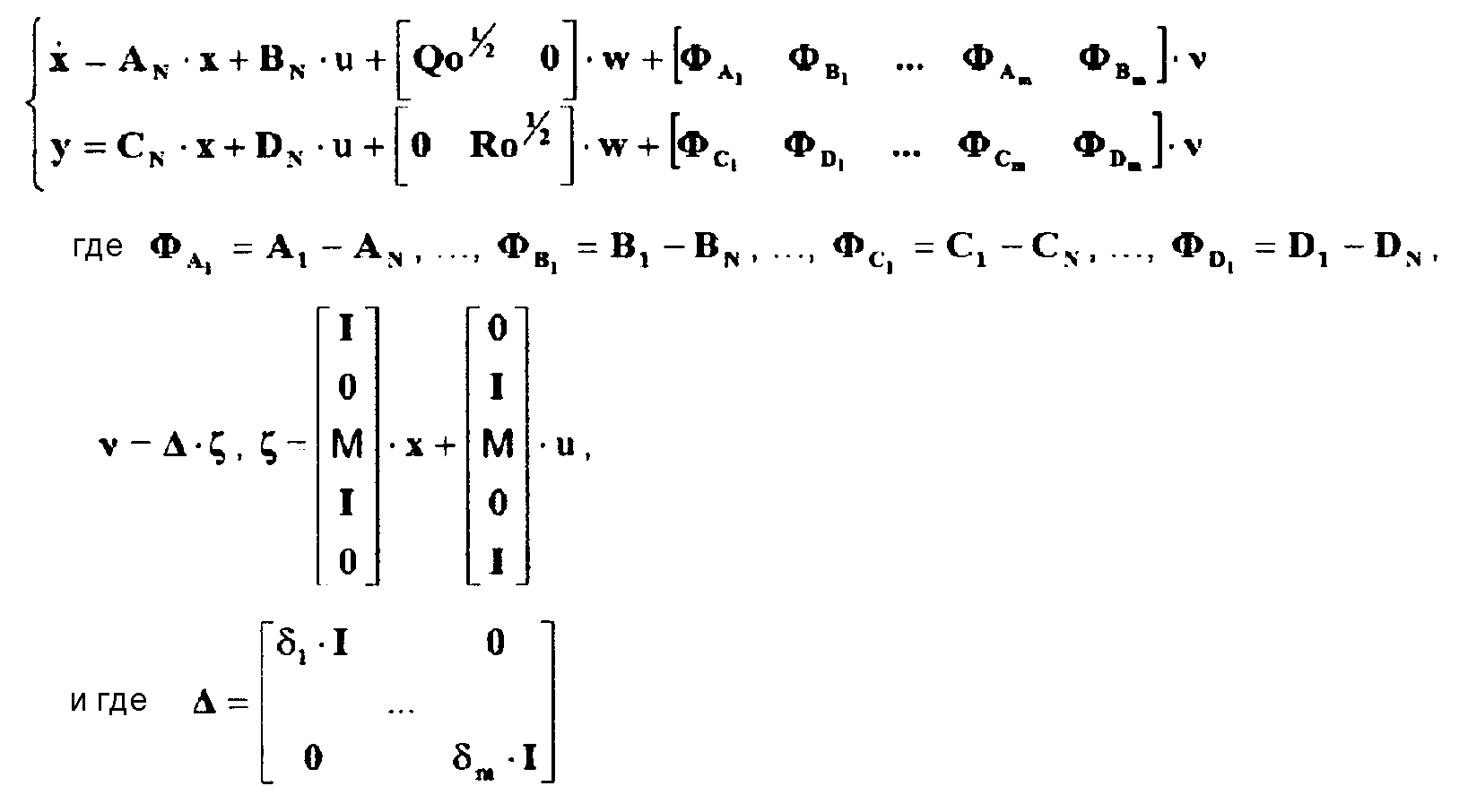
Изобретение предусматривает дальнейшее усовершенствование робастности команды посредством снижения чувствительности. В этом случае способ моделируется вблизи номинальной рабочей точки следующим образом:

где w - гауссов белый шум, воспроизводящий состояние и шум измерения.
Номинальную модель дополняют на этапе 109 с фигуры 1 набором K моделей {Mi}, выбранных так, чтобы охарактеризовать возможные изменения состояния системы. Выбранные надлежащим образом, эти модели образуют «базу» изменений.
Отклонение любой модели из набора Mk от номинальной модели MN затем параметризуют, проецируя разность M-MN на отклонения моделей из набора {Mi} от номинальной модели MN:
Mk-MN =∑δik(Mi-MN),
где δik, меняющийся от 0 до 1, есть нормализованный параметр.
Далее можно определить произведение параметров δ следующим образом:
Δ = [δik]i= 1,...,m; k = 1,.,.,Κ
В частности, количество параметров δi ограничено количеством m лежащих в основе реальных параметров. Затем можно получить следующий набор уравнений для описания эволюции системы:
Эволюцию системы затем характеризуют набором уравнений, представленных в виде блок-схемы на фигуре 5.
На фигуре 5 центральный блок 11 представляет стандартную систему, которая характеризуется Am, Bm, Cm, Dm, Q0, R0 и набором моделей {Mk}.
Неопределенности передаются во внешний контур усиления Δ.
Оптимальную команду при фиксированном Δ определяют коэффициентом усиления -K(s).
Затем задают две системы. Первая система H(s) включает в себя стандартную систему 11 и контур коэффициента усиления -K(s). Вторая система H(s) содержит систему H(s) и контур усиления Δ.
Система H(s) принимает на вход w и v и выводит ζ и z. ζ отправляется на контур усиления Δ для получения v (см. приведенные выше уравнения).
Затем, определяя Ηζv, Hζw, Hzv, и Hzw, зависимые субматрицы K(s) передаточной функции H(s):

Это передают полной системе в виде:

Полагая, что <σ, где σ есть сколь угодно малый регулировочный параметр и есть норма (норма равна 2 или, например, бесконечности), передаточную функцию H можно разложить в ряд Тейлора.
Тогда H≈Hzw + ΗzvΔΗζw + ΗzvΔΗζvΔΗζw
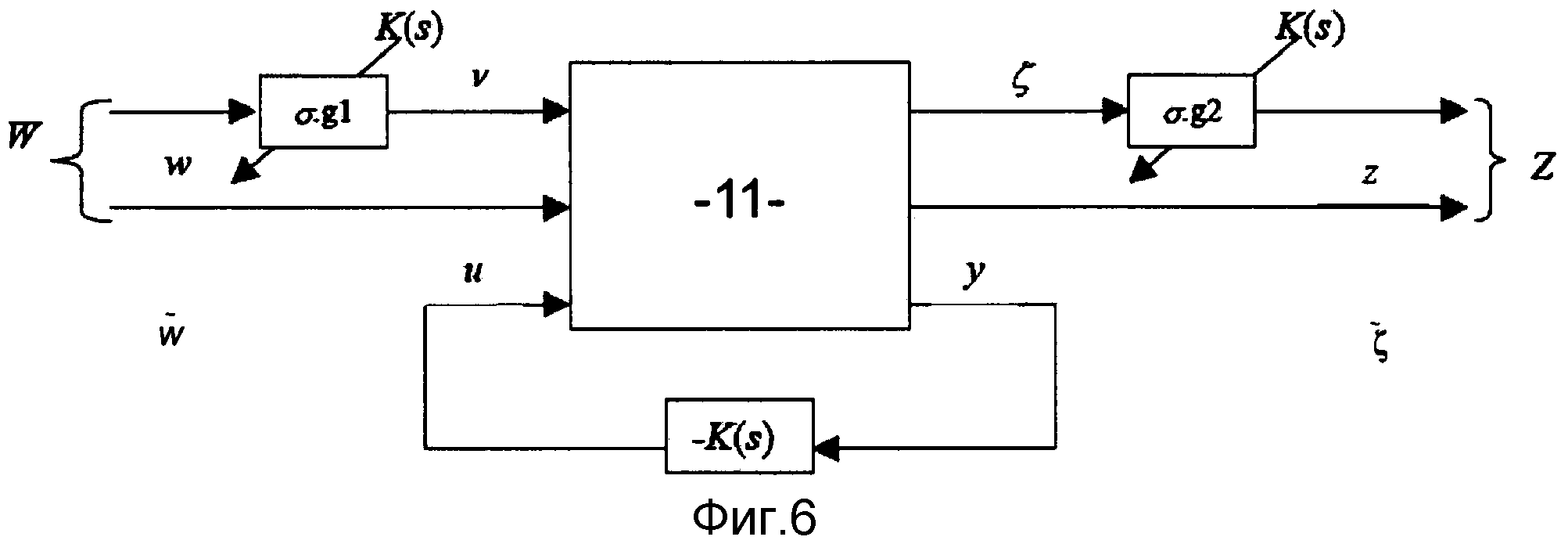
Оптимизируемый процесс, представленный в виде блок-схемы на фигуре 6, конструируют, вводя реконструированные векторы и  , в данном конкретном случае используя предиктор FFD, описанный выше. Также можно использовать реконструированное состояние, полученное другим способом, например, с помощью оператора оценки Калмана.
, в данном конкретном случае используя предиктор FFD, описанный выше. Также можно использовать реконструированное состояние, полученное другим способом, например, с помощью оператора оценки Калмана.
Данная расширенная система принимает на вход w и, объединенные в вектор W, отдельно по двум параллельным линиям, умножают на σΗζw. Для получения v, w и v подают на центральный блок, представляющий систему 11. На выходе системного блока 11 получают ζ и z. ζ умножают на σΗζv для получения  , объединенного с z в один выходной вектор Z.
, объединенного с z в один выходной вектор Z.
Расширенная система также включает в себя контур коэффициента обратной связи -K(s), который соединяет выход y с входом u системного блока 11.
Начиная с регулятора без сниженной чувствительности, в котором коэффициент усиления контура обратной связи имеет величину K0, оптимизацию системы H далее применяют к Δ с фиксированным K(s), имеющим значение K0. Таким образом, получают новую в отношении K(s) систему 11 для оптимизации для определения нового коэффициента усиления K1 данного контура. Оптимизацией, примененной к Δ, устанавливается новая система 11 с этим новым коэффициентом усиления K1. Эти последние этапы затем повторяют. δik являются дополнительными регулировочными параметрами. Поэтому их можно только частично регулировать во время этапов оптимизации. Выбор δik, которые будут модифицированы, по существу, зависит от формы выбранных моделей.
Ηζw и Hzv зависят от величины K(s), и поэтому при каждой итерации размерность K(s) увеличивается. Чтобы это предотвратить, можно при втором приближении заменить Ηζw и Hzv статичными коэффициентами g1, g2, взвешивая с использованием σ.
Таким образом, получают цикл итераций, который может повторяться до тех пор, пока не будет выполнено условие сходимости. На практике, пяти повторений оказалось в большинстве случаев достаточно, и поэтому фиксированное число повторений приводит к приемлемому результату.
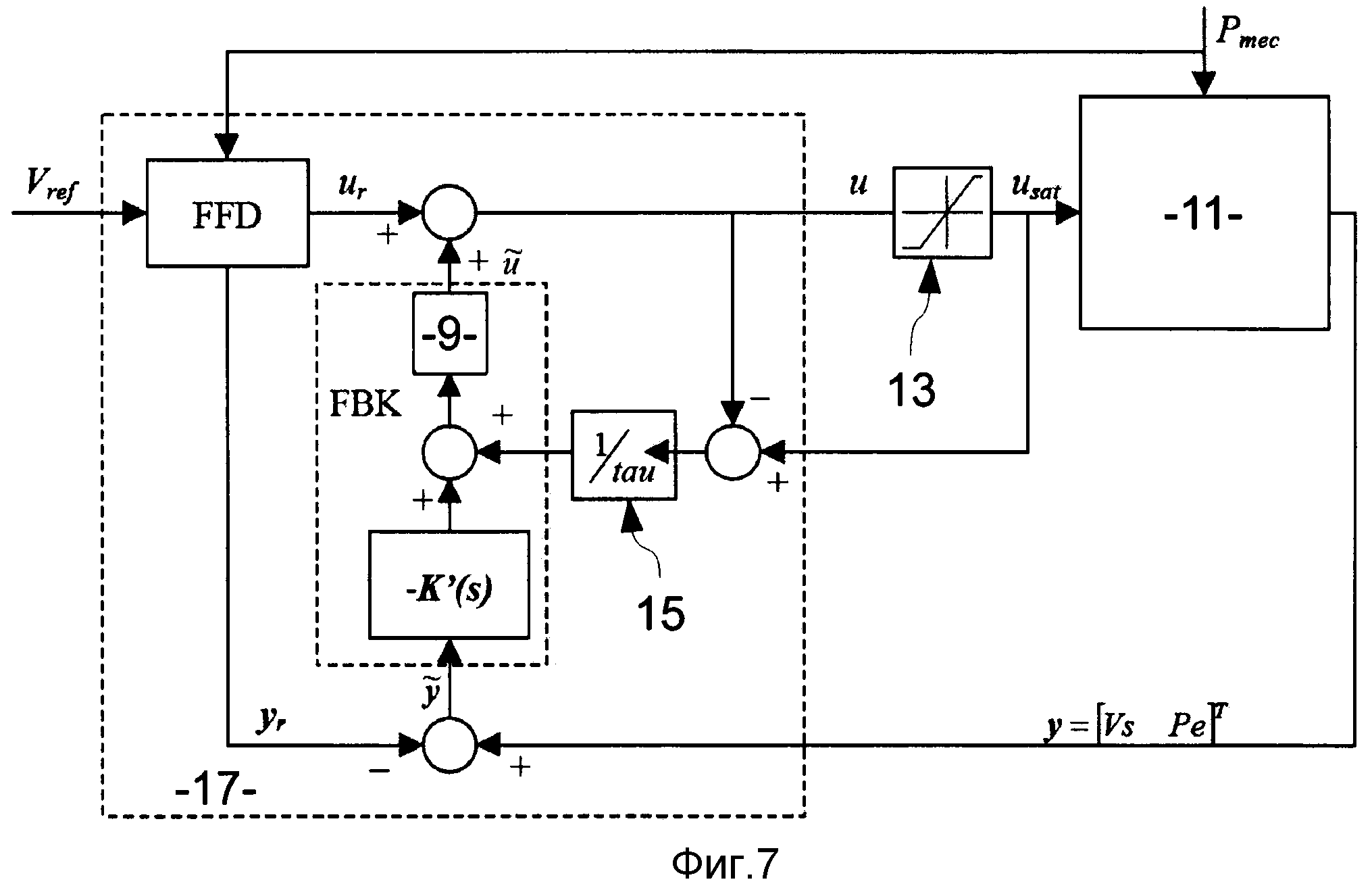
Фигура 7 показывает в виде функциональной блок-схемы один вариант осуществления регулятора генератора 3 переменного тока, систему устройства 5 возбуждения, как описано выше, дополнительно содержащую функцию ослабления.
Реальное устройство имеет только один ограниченный диапазон команды u. Ограниченность диапазона является результатом технического исполнения системы, и величина ограничения зависит от варианта осуществления.
На фигуре 7 схема содержит упомянутую систему 11 с функцией снижения чувствительности, блок предиктора FFD, функцию ОС и дополнительный блок 13, учитывающий достижение предела команды u.
Блок FFD принимает главное возмущение Pmec и опорное напряжение Yref и подает на выход опорные величины ur, yr.
Блок ОС принимает на вход разность между выходом системного блока 11 и опорным выходным значением yr, и при коэффициенте усиления обратной связи -K'(s) позволяет получить прототип команды, к которой прибавляют опорную команду ur для получения команды u, которая после ввода в дополнительный блок 13 насыщения выдает достигающую предела команду usat, которая подается в систему 11.
Прототип команды получают, используя интегратор 15 ослабления усиления usat, интегрирующий разность между командой u и достигающей предела командой usat.
Следует особенно отметить, что интегратор 9 помещают в блок ОС, вблизи его выхода, что соответствует изменению переменной, связанной с ОС, описанной выше.
Полученный регулятор продемонстрировал выигрышные результаты при устранении описанных выше возмущений, при симуляции, проводившейся, в частности, на реакторе Фламанвиль (Flamanville EPR, европейский водо-водяной реактор).
В частности, в случае коротких замыканий мощность восстанавливается менее чем за 10 секунд, при обеспечении поддержания полного угла (который обеспечивает стабильность) только регулятором в широком диапазоне рабочих точек.
В случае падений напряжения, напряжение на выводах трансформатора, соединенных с генератором переменного тока, во всех исследуемых случаях остается в пределах, налагаемых Электроэнергетической компанией Франции (Electricité de France, EDF).
В случае сброса нагрузки напряжение восстанавливается до конечных значений с погрешностью менее 1% менее чем за 10 секунд.
В случае падения частоты, возврат к нормальным значениям с погрешностью в пределах 1% занимает меньше 8 секунд, при этом отклонение напряжения относительно уставки не превышает 4%.
Времена возврата, в частности в пределы 1% требуемого значения, подтверждают быстрое и эффективное устранение колебаний.
Таким образом, способ позволяет снижать возмущения состояния системы. Приближая реальное состояние к идеальному состоянию, способ обеспечивает стабильность системы, зависящую только от точности используемой модели и от точности измерений.
Способ и устройство для управления электростатическим пылеуловителем
Ротор для электродинамической машины
Ротор электрической машины
Система и способ регенерации раствора абсорбента
Улучшенная промотором система на основе охлажденного аммиака и способ удаления co из потока дымового газа
Способ оценки пылевой нагрузки электрофильтра и способ и устройство управления встряхиванием электрофильтра
Универсальный узел рекуператора для отработавших газов газовой турбины
Электрическая машина, в частности трехфазный асинхронный гидрогенератор
Система и способ регенерации раствора абсорбента
Система и способ удаления кислотного компонента из технологического потока
Способ и устройство для управления электростатическим пылеуловителем
Ротор для электродинамической машины
Ротор электрической машины
Система и способ регенерации раствора абсорбента
Улучшенная промотором система на основе охлажденного аммиака и способ удаления co из потока дымового газа
Способ оценки пылевой нагрузки электрофильтра и способ и устройство управления встряхиванием электрофильтра
Универсальный узел рекуператора для отработавших газов газовой турбины
Электрическая машина, в частности трехфазный асинхронный гидрогенератор
Система и способ регенерации раствора абсорбента
Система и способ удаления кислотного компонента из технологического потока

