Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ С ИСПОЛЬЗОВАНИЕМ АЭРОДИНАМИЧЕСКОГО КАЧЕСТВА ПРИ СПУСКЕ В АТМОСФЕРЕ
Вид РИД
Изобретение
Изобретение относится к космонавтике, в частности к области управления космическим аппаратом (КА), располагающим аэродинамическим качеством, при спуске в атмосфере, обеспечивающим снижение максимальных перегрузок, действующих на КА в процессе аэродинамического торможения в атмосфере.
При спуске КА в атмосфере Земли и планет одной из важнейших задач является минимизация максимальных перегрузок, действующих на КА в процессе снижения. Расширение спектра задач спускаемых аппаратов, в первую очередь связанных с их маневрированием в атмосфере, предопределяет необходимость разработки эффективных методов снижения перегрузочных режимов, т.к. чрезвычайно большие пиковые перегрузки могут привести к потерям управляемости КА и, как следствие, к срыву выполнения целевых задач космических экспедиций.
Известен ряд способов управления КА аэродинамическим качеством при снижении в атмосфере. Так, достаточно простым в реализации является способ управления, состоящий в движении КА с максимальным значением эффективного аэродинамического качества: Кэф=Kбcosγ, где Кб - балансировочное аэродинамическое качество, установленное на заданном угле атаки α, γ - угол крена, устанавливаемый равным нулю для обеспечения максимума Кэф. Этот способ описан в работе - Иванов Н.М., Мартынов А.И., Соколов Н.Л. «О выборе основных проектно-баллистических характеристик и способа управления КА планирующего типа, предназначенных для спуска на поверхность Марса». Космические исследования, 1977 г., т. 15, вып. 1, стр. 42-52 - [1]. Использование такого способа обеспечивает достаточно низкие значения продольной составляющей перегрузки nx, действующей на КА:
 ,
,
где ρ - плотность атмосферы;
V - скорость космического аппарата;
Cx - аэродинамический коэффициент лобового сопротивления;
S - площадь миделева сечения;
m - масса космического аппарата;
g - ускорение свободного падения.
Вместе с тем данный способ имеет существенные недостатки, связанные с отсутствием возможности оперативного изменения управляющих параметров при полете КА в атмосфере. Во-первых, его осуществление не предусматривает внесения необходимых корректив в программу управления КА для снижения максимальных перегрузок. Во-вторых, реализация такого способа для КА с большими значениями аэродинамического качества может привести к вылету аппарата из атмосферы после рикошета в плотных слоях атмосферы и, следовательно, к невозможности осуществления посадки в заданном районе.
Известен способ управления, предусматривающий одноразовое переключение эффективного аэродинамического качества Кэф с максимального по модулю отрицательного значения на максимальное положительное, описанный в работе - Иванов Н.М., Мартынов А.И. «Движение космических летательных аппаратов в атмосферах планет». M.: Наука, 1985, стр. 94-99 - [2]. Этот способ позволяет путем выбора момента переключения регулировать максимальную величину перегрузки, а также предотвратить вылет КА из атмосферы и обеспечить посадку в заданном районе. Однако применение данного способа не позволяет обеспечить существенное снижение максимальной полной перегрузки, особенно для КА, располагающих большим аэродинамическим качеством (например, КА планирующего и самолетного типов). Действительно, максимальная полная перегрузка, рассчитываемая по формуле (см. [2]):

может достигать больших величин за счет значительной боковой составляющей ny. Таким образом, значительный резерв в снижении максимума полной перегрузки может быть связан с уменьшением эффективного аэродинамического качества в процессе достижения КА плотных слоев атмосферы.
Наиболее близким по совокупности существенных признаков и достигаемому результату к заявляемому способу является способ управления КА, описанный в работе - Константинов Н.С., Каменков Е.Ф., Перелыгин Б.П., Безвербый В.К., под редакцией Мишина В.П. «Механика космического полета». М.: Машиностроение, 1989, стр. 371-378 - [3]. Данный способ предусматривает движение КА с нулевым значением угла крена γ и с постоянным значением балансировочного качества  , лежащего во внутренней точке диапазона [0, Кбmах]:
, лежащего во внутренней точке диапазона [0, Кбmах]:  Определение рационального значения
осуществляется на основе компромиссных факторов. С одной стороны, выбор аэродинамического качества
близким к Кбmax приводит к чрезмерно большим значениям боковой составляющей перегрузки, а с другой стороны значительное уменьшение аэродинамического качества приводит к снижению подъемной силы КА, движению аппарата в более плотных слоях атмосферы и, следовательно, к росту продольной составляющей перегрузки. Поэтому рациональные значения
находятся внутри возможного диапазона изменения величины Кб. Рекомендации по выбору величины
приводятся в работе [3]. Показано, что для КА, располагающего балансировочным аэродинамическим качеством, Кб≈1,5 целесообразно осуществлять полет КА в плотных слоях атмосферы на этапе интенсивного возрастания перегрузок с
Определение рационального значения
осуществляется на основе компромиссных факторов. С одной стороны, выбор аэродинамического качества
близким к Кбmax приводит к чрезмерно большим значениям боковой составляющей перегрузки, а с другой стороны значительное уменьшение аэродинамического качества приводит к снижению подъемной силы КА, движению аппарата в более плотных слоях атмосферы и, следовательно, к росту продольной составляющей перегрузки. Поэтому рациональные значения
находятся внутри возможного диапазона изменения величины Кб. Рекомендации по выбору величины
приводятся в работе [3]. Показано, что для КА, располагающего балансировочным аэродинамическим качеством, Кб≈1,5 целесообразно осуществлять полет КА в плотных слоях атмосферы на этапе интенсивного возрастания перегрузок с  . Данному способу управления КА присуща совокупность признаков, наиболее близкая к совокупности существенных признаков изобретения, и он выбран в качестве прототипа.
. Данному способу управления КА присуща совокупность признаков, наиболее близкая к совокупности существенных признаков изобретения, и он выбран в качестве прототипа.
Способ-прототип позволяет уменьшить nmax по сравнению со способами-аналогами за счет рационального выбора
и, как следствие, за счет снижения боковой составляющей полной перегрузки, действующей на КА в плотных слоях атмосферы. Однако данный способ имеет существенные недостатки. Во-первых, при разработке способа-прототипа отсутствует обоснование выбора оптимального значения аэродинамического качества
, которое, очевидно, будет различным для широкого диапазона условий входа КА в атмосферу и проектных характеристик аппарата. В заявленном способе - осуществление программы полета с оптимальными значениями аэродинамического качества
, зависящими от варианта исходных данных, позволит сократить максимальные значения полной перегрузки nmax. Во-вторых, резерв в уменьшении nmax можно найти в принципиальном изменении технологии управления: в использовании схемы полета до рикошета не с постоянным, а с переменным значением балансировочного качества Кб, функционально зависящим не только от исходных условий, но и от текущего вектора состояния КА. В-третьих, траектории спуска КА с большими значениями аэродинамического качества, как правило, содержат несколько пиков полных перегрузок, а способ-прототип не предусматривает обоснование того, что на участках спуска после рикошета полная перегрузка не превысит значения nmax, реализуемого до рикошета.
Задачами, на решение которой направлено изобретение, является устранение указанных недостатков.
Технический результат изобретения заключается в снижении максимальных значений полной перегрузки, что позволяет повысить устойчивость управления космическими аппаратами, снизить требования к прочностным характеристикам элементов конструкции КА и оптимизировать массово-габаритный баланс при компоновке спускаемых аппаратов.
Сущность заявленного способа управления космическим аппаратом аэродинамическим качеством при спуске в атмосфере заключается в следующем. Осуществляется вход в атмосферу с максимальным эффективным аэродинамическим качеством Кэфmax, т.е. с максимальным балансировочным аэродинамическим качеством Кбmax и с нулевым углом крена γ=0. В процессе всего полета КА в атмосфере измеряют текущие траекторные параметры движения КА: скорость полета Vi, угол наклона скорости к местному горизонту θi, высоту полета hi, угол между проекцией вектора скорости на местный горизонт и местной параллелью εi, широту подспутниковой точки полета КА φi, а также плотность атмосферы ρi, где i=1, 2, 3 …, n - интервалы измерений текущих координат движения КА, где n - конечный интервал измерения координат движения до выхода КА на изовысотный участок.
Сразу после входа КА в атмосферу его скорость начинает несколько возрастать, т.к. силы гравитации увеличиваются по мере приближения аппарата к притягивающему центру, а аэродинамические силы достаточно малы в связи с малой плотностью верхних слоев атмосферы. Далее в процессе уменьшения высоты полета аэродинамическое сопротивление начинает интенсивно возрастать, скорость полета КА сначала замедляет свой рост, затем после прохождения своего максимума начинает снижаться и достигает начального значения V0 (скорость входа КА в атмосферу). На начальном участке полета перегрузка, действующая на КА, достаточно мала, что не приводит к необходимости внесения корректив в программу управления КА. Затем, при Vi<V0, перегрузка начинает интенсивно возрастать, и для снижения темпа ее роста (в первую очередь боковой составляющей ny) устанавливают аэродинамическое качество
, меньшее, чем Кбmax. Значения  определяются из уравнения:
определяются из уравнения:
 ,
,
где  ;
;
ri=hi+R;
 ;
;
- текущее значение балансировочного аэродинамического качества космического аппарата;
θ0 - траекторный угол входа космического аппарата в атмосферу;
V0 - скорость входа космического аппарата в атмосферу;
Vi - скорость полета космического аппарата на i-м интервале измерения;
hi - высота полета космического аппарата на i-м интервале измерения;
ri - радиус-вектор, соединяющий центр притяжения планеты и центра масс космического аппарата на i-м интервале измерения;
εi - угол между проекцией вектора скорости на местный горизонт и местной параллелью на i-м интервале измерения;
ρi - плотность атмосферы на текущей высоте полета космического аппарата hi на i-м интервале измерения,
i=1, 2, …, n;
n - конечный интервал измерения координат движения до выхода КА на изовысотный участок;
Px - приведенная нагрузка на лобовую поверхность;
g - ускорение силы тяжести;
ω - угловая скорость вращения планеты;
ρ0 - плотность атмосферы на поверхности планеты;
β - логарифмический коэффициент изменения плотности атмосферы по высоте.
Анализ уравнения для расчета
показывает, что сразу после выполнения условия Vi<V0 аэродинамическое качество
принимает достаточно большие положительные значения: переменная  , стоящая в знаменателе уравнения, близка к нулю и, так же как и θ0, стоящая в числителе уравнения, имеет отрицательное значение. В связи с тем, что максимальное балансировочное аэродинамическое качество каждого конкретного КА ограничено значением Кбmах, при вычислении значений
, больших, чем максимально возможное, продолжают осуществлять полет с Кбmах и с γ=0. Затем, по мере снижения скорости Vi, аэродинамическое качество
уменьшается. Дальнейший полет КА в атмосфере осуществляют со значением
, вычисленным на основании представленного уравнения.
, стоящая в знаменателе уравнения, близка к нулю и, так же как и θ0, стоящая в числителе уравнения, имеет отрицательное значение. В связи с тем, что максимальное балансировочное аэродинамическое качество каждого конкретного КА ограничено значением Кбmах, при вычислении значений
, больших, чем максимально возможное, продолжают осуществлять полет с Кбmах и с γ=0. Затем, по мере снижения скорости Vi, аэродинамическое качество
уменьшается. Дальнейший полет КА в атмосфере осуществляют со значением
, вычисленным на основании представленного уравнения.
На этом участке полета полная перегрузка достигает максимальной величины. При этом путем установления расчетных значений
обеспечивается снижение пиковых величин перегрузки, действующей на КА и реализуется минимум максимальной полной перегрузки min nmax. На бортовом запоминающем устройстве КА фиксируются значения аэродинамического качества  , плотности атмосферы ρ*, скорости полета V* на момент достижения min nmax. Управление КА с рассчитываемыми значениями
по указанному уравнению осуществляется до рикошета траектории полета космического аппарата, т.е. до θi=0. По достижении рикошета осуществляют полет КА по изовысотному участку (hи=const), измеряют текущие траекторные параметры движения КА: скорость полета Vj, угол между проекцией вектора скорости на местный горизонт и местной параллелью εj, широту подспутниковой точки полета космического аппарата φj, где угол крена γ осуществляется из условия
, плотности атмосферы ρ*, скорости полета V* на момент достижения min nmax. Управление КА с рассчитываемыми значениями
по указанному уравнению осуществляется до рикошета траектории полета космического аппарата, т.е. до θi=0. По достижении рикошета осуществляют полет КА по изовысотному участку (hи=const), измеряют текущие траекторные параметры движения КА: скорость полета Vj, угол между проекцией вектора скорости на местный горизонт и местной параллелью εj, широту подспутниковой точки полета космического аппарата φj, где угол крена γ осуществляется из условия  , т.е.
, т.е.

где rи=hи+R;
γ - угол крена космического аппарата;
Px - приведенная нагрузка на лобовую поверхность;
g - ускорение силы тяжести;
ω - угловая скорость вращения планеты;
ρи - плотность атмосферы при полете космического аппарата на изовысотном участке;
hи - высота полета КА по изовысотному участку;
R - средний радиус планеты;
Кб - балансировочное аэродинамическое качество космического аппарата;
Vj - скорость полета космического аппарата по изовысотному участку на j-м интервале измерения;
εj - угол между проекцией вектора скорости на местный горизонт и местной параллелью при движении космического аппарата по изовысотному участку на j-м интервале измерения;
φj - широта подспутниковой точки полета космического аппарата по изовысотному участку на j-м интервале измерения, j=1, 2, …, l;
l - конечный интервал измерений текущих координат при движения КА по изовысотному участку.
Необходимость реализации изовысотного участка полета обуславливается следующими соображениями: во-первых, при таком режиме предотвращается возможность роста высоты полета, что способствует повышению эффективности аэродинамического торможения КА и впоследствии приведет к снижению массы топлива при осуществлении мягкой посадки аппарата на поверхность планеты. Во-вторых, обеспечивается возможность бокового маневра КА: при вычислении одного и того же значения функции «arccos» по указанному уравнению можно выбрать различные знаки угла крена γ, что позволяет осуществлять движение КА либо вправо, либо влево в зависимости от относительного расположения трассы полета аппарата и точки посадки.
Анализ вышерассмотренного уравнения для определения угла крена γ показывает, что изовысотный участок полета может быть реализован при различных сочетаниях угла γ и аэродинамического качества Кб. Причем с увеличением Кб уменьшается значение «cosγ». Это позволяет обеспечить полет КА по изовысотному участку с максимально допустимым значением Кб, что дает возможность обеспечения наиболее интенсивного маневра КА в боковом направлении. При этом увеличение аэродинамического качества Кб не должно привести к росту боковой составляющей перегрузки, при которой полная перегрузка превосходит значение min nmax. Это обеспечивается реализацией полета КА по изовысотному участку с балансировочным аэродинамическим качеством, определяемым с помощью зависимости:
 ,
,
где Kб - текущее значение балансировочного аэродинамического качества при полете космического аппарата по изовысотному участку;
 - балансировочное аэродинамическое качество космического аппарата в момент достижения максимальной перегрузки;
- балансировочное аэродинамическое качество космического аппарата в момент достижения максимальной перегрузки;
ρ* - плотность атмосферы в момент достижения максимальной перегрузки;
V* - скорость полета космического аппарата в момент достижения максимальной перегрузки;
ρи - плотность атмосферы при полете космического аппарата на изовысотном участке;
Vj - скорость полета космического аппарата по изовысотному участку на j-м интервале измерения, j=1, 2, …, l;
l - конечный интервал измерений текущих координат при движения КА по изовысотному участку.
Итак, в процессе полета КА по изовысотному участку значения γ и Kб определяются в соответствии с представленными зависимостями. При движении КА по этому участку аэродинамическое качество Кб монотонно возрастает (т.к. скорость полета аппарата уменьшается) и достигает своего максимума Kбmax. После этого осуществляют сход КА с изовысотного участка с Кб=Kбmax и нулевым углом крена. Такой режим полета обеспечивает наиболее благоприятные условия при вводе в действие системы мягкой посадки КА.
Также сущность заявленного способа управления космическим аппаратом аэродинамическим качеством при спуске в атмосфере заключается в осуществлении входа космического аппарата в атмосферу с максимальным значением эффективного аэродинамического качества, измерении текущих значений параметров движения космического аппарата в процессе его спуска в атмосфере, управлении балансировочным аэродинамическим качеством Kб и углом крена γ и движении на изовысотном участке, при этом после уменьшения текущей скорости движения космического аппарата Vi до значения скорости входа космического аппарата в атмосферу V0 устанавливают текущие значения балансировочного аэродинамического качества
космического аппарата, определяемое в соответствии с выражением:
,
где
;
ri=hi+R;
 при
при 
- текущее значение балансировочного аэродинамического качества космического аппарата;
θ0 - траекторный угол входа космического аппарата в атмосферу;
V0 - скорость входа космического аппарата в атмосферу;
Vi - скорость полета космического аппарата на i-м интервале измерения;
hi - высота полета космического аппарата на i-м интервале измерения;
ri - радиус-вектор, соединяющий центр притяжения планеты и центра масс космического аппарата на i-м интервале измерения;
εi - угол между проекцией вектора скорости на местный горизонт и местной параллелью на i-м интервале измерения;
ρi - плотность атмосферы на текущей высоте полета космического аппарата hi на i-м интервале измерения, i=1, 2, …, n;
n - конечный интервал измерения координат движения до выхода КА на изовысотный участок;
Px - приведенная нагрузка на лобовую поверхность;
g - ускорение силы тяжести;
ω - угловая скорость вращения планеты;
ρ0 - плотность атмосферы на поверхности планеты;
β - логарифмический коэффициент изменения плотности атмосферы по высоте;
Kбmax - максимальное значение балансировочного аэродинамического качества космического аппарата,
после выхода космического аппарата на изовысотный участок устанавливают текущие значения балансировочного аэродинамического качества Кб, определяемое в соответствии с выражением:
 ,
,
где Kб - текущее значение балансировочного аэродинамического качества при полете космического аппарата по изовысотному участку;
 - балансировочное аэродинамическое качество космического аппарата в момент достижения максимальной перегрузки;
- балансировочное аэродинамическое качество космического аппарата в момент достижения максимальной перегрузки;
ρ* - плотность атмосферы в момент достижения максимальной перегрузки;
V* - скорость полета космического аппарата в момент достижения максимальной перегрузки;
ρи - плотность атмосферы при полете космического аппарата на изовысотном участке;
Vj - скорость полета космического аппарата по изовысотному участку на j-м интервале измерения,
j=1, 2, …, l;
l - конечный интервал измерений текущих координат при движения космического аппарата по изовысотному участку,
по достижении балансировочным аэродинамическим качеством Kб максимального значения Kбmax осуществляют сход космического аппарата с изовысотного участка и дальнейший его полет в атмосфере с аэродинамическим качеством Kбmax и углом крена γ=0.
Предложенный способ управления обладает рядом преимуществ по сравнению с прототипом. Реализация данного способа позволяет уменьшить максимальные значения полной перегрузки, действующей на КА в процессе снижения в атмосфере за счет использования рациональной программы управления балансировочным аэродинамическим качеством на участке полета до рикошета траектории, где обеспечивается минимум максимальной перегрузки min nmax, a также за счет осуществления режима полета по изовысотному участку с переменным значением аэродинамического качества, что обеспечивает возможность выполнения ограничения:
n(t)≤min nmax,
где n(t) - текущее значение полной перегрузки в момент времени t,
min nmax - минимальное значение максимальной перегрузки, действующей на космический аппарат на участке его выхода на изовысотный участок.
Таким образом, технический результат изобретения заключается в снижении максимальных значений полной перегрузки, что позволяет повысить устойчивость управления космическими аппаратами, снизить требования к прочностным характеристикам элементов конструкции КА и оптимизировать массово-габаритный баланс при компоновке спускаемых аппаратов. Это особенно важно при проектировании космических аппаратов, осуществляющих спуск в высокоплотных атмосферах Венеры и Юпитера, где пиковые значения максимальных перегрузок могут достигать чрезвычайно больших величин. Полученные результаты численных расчетов показали, что уменьшение максимума полной перегрузки при спуске КА в атмосфере Марса достигает 2÷5 единиц, при спуске в атмосфере Венеры - 8÷15 единиц, при спуске в атмосфере Юпитера - 20÷30 единиц.
Указанный технический результат достигается за счет уменьшения максимальной полной перегрузки, действующей на КА в процессе спуска в атмосфере при оптимальном управлении аэродинамическим качеством космического аппарата.
Также указанный технический результат достигается за счет того, что в известном способе-прототипе управления космическим аппаратом аэродинамическим качеством при спуске в атмосфере, заключающемся в осуществлении входа космического аппарата в атмосферу с максимальным значением эффективного аэродинамического качества, измерении текущих значений параметров движения космического аппарата в процессе его спуска в атмосфере, управлении балансировочным аэродинамическим качеством Kб и углом крена γ и движении на изовысотном участке дополнительно после уменьшения текущей скорости движения космического аппарата Vi до значения скорости входа космического аппарата в атмосферу V0, устанавливают текущие значения балансировочного аэродинамического качества
космического аппарата, определяемое в соответствии с выражением:
,
где
;
ri=hi+R;
при
- текущее значение балансировочного аэродинамического качества космического аппарата;
θ0 - траекторный угол входа космического аппарата в атмосферу;
V0 - скорость входа космического аппарата в атмосферу;
Vi - скорость полета космического аппарата на i-м интервале измерения;
hi - высота полета космического аппарата на i-м интервале измерения;
ri - радиус-вектор, соединяющий центр притяжения планеты и центра масс космического аппарата на i-м интервале измерения;
εi - угол между проекцией вектора скорости на местный горизонт и местной параллелью на i-м интервале измерения;
ρi - плотность атмосферы на текущей высоте полета космического аппарата hi на i-м интервале измерения, i=1, 2, …, n;
n - конечный интервал измерения координат движения до выхода КА на изовысотный участок;
Px - приведенная нагрузка на лобовую поверхность;
q - ускорение силы тяжести;
ω - угловая скорость вращения планеты;
ρ0 - плотность атмосферы на поверхности планеты;
β - логарифмический коэффициент изменения плотности атмосферы по высоте;
Kбmax - максимальное значение балансировочного аэродинамического качества космического аппарата,
после выхода космического аппарата на изовысотный участок устанавливают текущие значения балансировочного аэродинамического качества
, определяемое в соответствии с выражением:
,
где Kб - текущее значение балансировочного аэродинамического качества при полете космического аппарата по изовысотному участку;
 - балансировочное аэродинамическое качество космического аппарата в момент достижения максимальной перегрузки;
- балансировочное аэродинамическое качество космического аппарата в момент достижения максимальной перегрузки;
ρ* - плотность атмосферы в момент достижения максимальной перегрузки;
V* - скорость полета космического аппарата в момент достижения максимальной перегрузки;
ρи - плотность атмосферы при полете космического аппарата на изовысотном участке;
Vj - скорость полета космического аппарата по изовысотному участку на j-м интервале измерения,
j=1, 2, …, l;
l - конечный интервал измерений текущих координат при движения космического аппарата по изовысотному участку,
по достижении балансировочным аэродинамическим качеством Kб максимального значения Kбmax осуществляют сход космического аппарата с изовысотного участка и дальнейший его полет в атмосфере с аэродинамическим качеством Kбmax и углом крена γ=0.
Заявленный способ управления космическим аппаратом аэродинамическими силами при его спуске в атмосфере поясняется следующими фигурами.
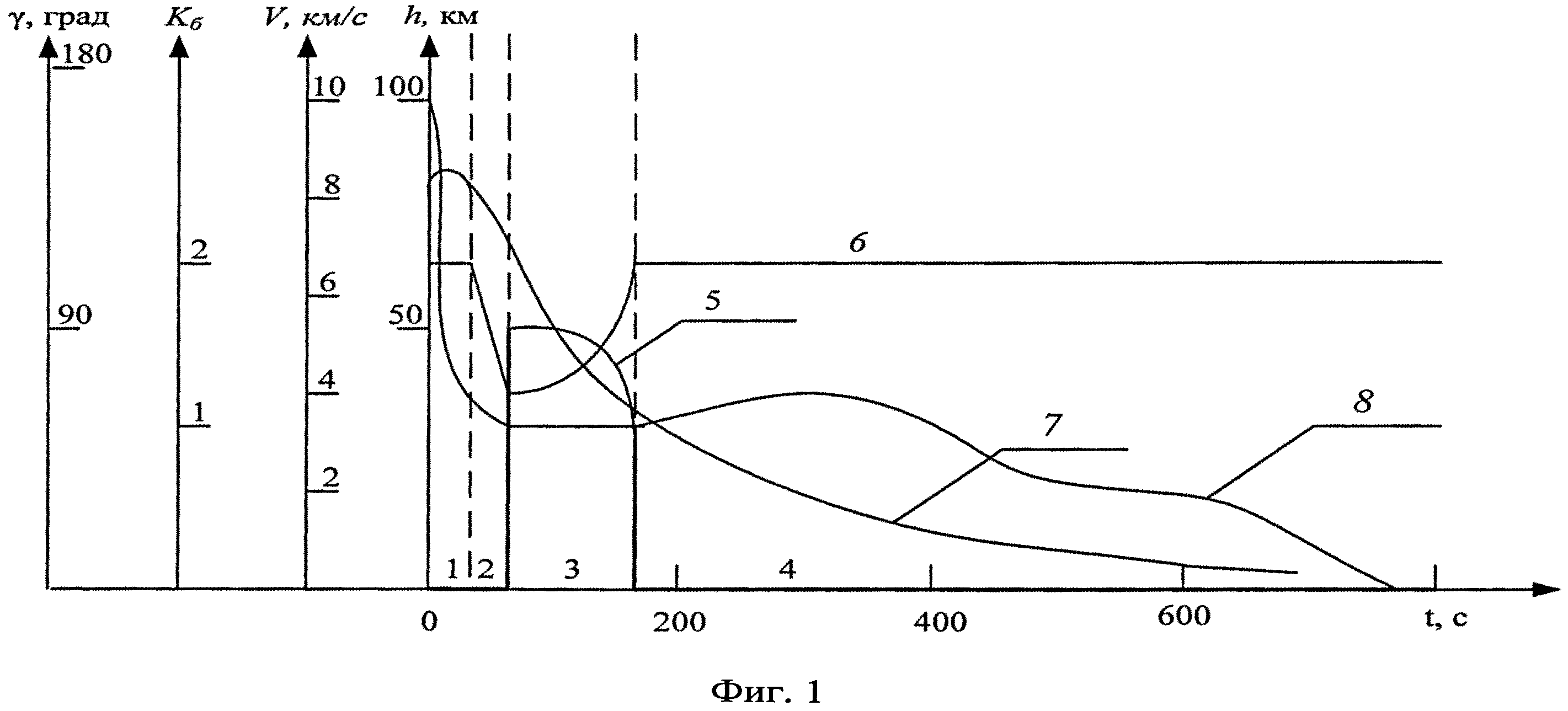
На фиг. 1 представлены зависимости скорости V, высоты полета КА h, балансировочного аэродинамического качества Kб и угла крена γ от времени движения аппарата в атмосфере t при реализации предлагаемого способа. При этом использовались следующие исходные данные: скорость входа космического аппарата в атмосферу V0=8 км/с, траекторный угол θ0=минус 8°, максимальное значение балансировочного аэродинамического качества Кбmax=2, приведенная нагрузка на лобовую поверхность космического аппарата Рx=5000 кг/м2.
На фиг. 2 приведены результаты, позволяющие оценить эффективность использования предлагаемого способа управления по сравнению со способом-прототипом. Так, в диапазоне изменения скорости входа КА в атмосферу Марса V0 от 6 до 10 км/с, угла входа θ0 от минус 5° до минус 12°, приведенной нагрузки на лобовую поверхность Px от 1000 до 10000 кг/м2 уменьшение максимума полной перегрузки достигает примерно 2÷5 единиц.
На фиг. 1, 2 и в тексте приняты следующие обозначения.
1 - начальный участок полета КА: Kб=Kбmax, γ=0,
2 - участок полета КА с наиболее интенсивными перегрузками: Kб определяется из условия минимизации максимальной полной перегрузки, γ=0,
3 - изовысотный участок: Kб определяется из условия не превышения полной перегрузки относительно значения min nmax, γ определяется из условия полета КА с постоянным значением высоты,
4 - участок схода КА с изовысотного участка: Kб=Кбmах, γ=0,
5 - зависимость изменения балансировочного аэродинамического качества Kб от времени спуска t,
6 - зависимость изменения угла крена γ от времени спуска t,
7 - зависимость изменения скорости полета КА V от времени спуска t,
8 - зависимость изменения высоты полета КА h от времени спуска t,
9 - зависимость изменения максимальной перегрузки nmax от угла наклона вектора скорости к местному горизонту θ0 при входе в атмосферу при использовании способа-прототипа,
10 - зависимость изменения максимальной перегрузки nmax от угла наклона вектора скорости к местному горизонту θ0 при входе в атмосферу при использовании изобретения,
11 - зависимость изменения максимальной перегрузки nmax от приведенной нагрузки на лобовую поверхность Px при использовании способа-прототипа,
12 - зависимость изменения максимальной перегрузки nmax от приведенной нагрузки на лобовую поверхность Px при использовании изобретения,
13 - зависимость изменения максимальной перегрузки nmax от скорости входа КА в атмосферу V0 при использовании способа-прототипа,
14 - зависимость изменения максимальной перегрузки nmax от скорости входа КА в атмосферу V0 при использовании изобретения.
Как следует из фиг. 1, представленные зависимости изменения балансировочного аэродинамического качества - 6 и угла крена - 5 на этапах выхода на изовысотный участок и движения по нему, а также соответствующие изменения скорости - 7 и высоты полета - 8 КА от времени спуска обеспечивают снижение максимальных полных перегрузок, действующих на КА в процессе полета в атмосфере.
Из фиг. 2 следует, что при использовании изобретения зависимости максимальных перегрузок nmax от угла θ0 - 9, от параметра Px - 11 и от скорости входа в атмосферу V0 - 13 соответствует более высоким значениям nmax по сравнению с аналогичными зависимостями, соответственно 10, 12 и 13 для способа-прототипа.
Ожидаемая эффективность использования предлагаемого способа управления по сравнению, например, со способом-прототипом, состоит в существенном уменьшении максимальной полной перегрузки. Так при спуске КА в атмосфере Марса для диапазона исходных данных 6 км/с ≤ V0 ≤ 10 м/с, минус 5° ≥ θ0 ≥ минус 20°, 1000 кг/м2 ≤ Px ≤ 10000 кг/м2 уменьшение nmax достигает 2÷5 единиц. Еще большее снижение nmax обеспечивается при спуске в атмосфере Венеры (примерно до 8-15 единиц) и при спуске в атмосфере Юпитера (примерно до 20-30 единиц).
Покажем возможность осуществления изобретения, т.е. возможность его промышленного применения.
Как известно, спуск КА в атмосферах планет является завершающим и наиболее динамичным этапом большинства космических экспедиций. Его успешная реализация зависит от ряда различных факторов, в том числе от обеспечения допустимых перегрузочных режимов. Реализация таких режимов во многом обеспечивает эффективное выполнение программ полета КА в целом. Этим обуславливается актуальность разработки способа управления космическим аппаратом аэродинамическими силами при спуске в атмосфере, обеспечивающим снижение максимальной полной перегрузки.
Что касается технических средств, обеспечивающих управление космическим аппаратом аэродинамическими силами при его спуске в атмосферах планет, то они известны - см., например, работу Иванова Н.М., Мартынова А.И. «Управление движением космического аппарата в атмосфере Марса». М.: Наука, 1977 г., стр. 270-279 и при необходимости приведенную в ней многочисленную библиографию.
Способ управления космическим аппаратом с использованием аэродинамического качества при спуске в атмосфере, заключающийся в осуществлении входа космического аппарата в атмосферу с максимальным значением эффективного аэродинамического качества, измерении текущих значений параметров движения космического аппарата в процессе его спуска в атмосфере, управлении балансировочным аэродинамическим качеством K и углом крена γ и движении на изовысотном участке, отличающийся тем, что после уменьшения текущей скорости движения космического аппарата V до значения скорости входа космического аппарата в атмосферу V устанавливают текущие значения балансировочного аэродинамического качества космического аппарата, определяемое в соответствии с выражением: ,где ;r=h+R; при - текущее значение балансировочного аэродинамического качества космического аппарата;θ - траекторный угол входа космического аппарата в атмосферу;V - скорость входа космического аппарата в атмосферу;V - скорость полета космического аппарата на i-м интервале измерения;h - высота полета космического аппарата на i-м интервале измерения;r - радиус-вектор, соединяющий центр притяжения планеты и центра масс космического аппарата на i-м интервале измерения;ε - угол между проекцией вектора скорости на местный горизонт и местной параллелью на i-м интервале измерения;ρ - плотность атмосферы на текущей высоте полета космического аппарата h на i-м интервале измерения, i=1, 2, …, n;n - конечный интервал измерения координат движения до выхода КА на изовысотный участок;P - приведенная нагрузка на лобовую поверхность;g - ускорение силы тяжести;ω - угловая скорость вращения планеты;ρ - плотность атмосферы на поверхности планеты;β - логарифмический коэффициент изменения плотности атмосферы по высоте;K - максимальное значение балансировочного аэродинамического качества космического аппарата,после выхода космического аппарата на изовысотный участок устанавливают текущие значения балансировочного аэродинамического качества K, определяемое в соответствии с выражением: ,где K - текущее значение балансировочного аэродинамического качества при полете космического аппарата по изовысотному участку; - балансировочное аэродинамическое качество космического аппарата в момент достижения максимальной перегрузки;ρ* - плотность атмосферы в момент достижения максимальной перегрузки;V* - скорость полета космического аппарата в момент достижения максимальной перегрузки;ρ - плотность атмосферы при полете космического аппарата на изовысотном участке;V - скорость полета космического аппарата по изовысотному участку на j-м интервале измерения,j=1, 2, …, l;l - конечный интервал измерений текущих координат при движения космического аппарата по изовысотному участку,по достижении балансировочным аэродинамическим качеством K максимального значения K осуществляют сход космического аппарата с изовысотного участка и дальнейший его полет в атмосфере с аэродинамическим качеством K и углом крена γ=0.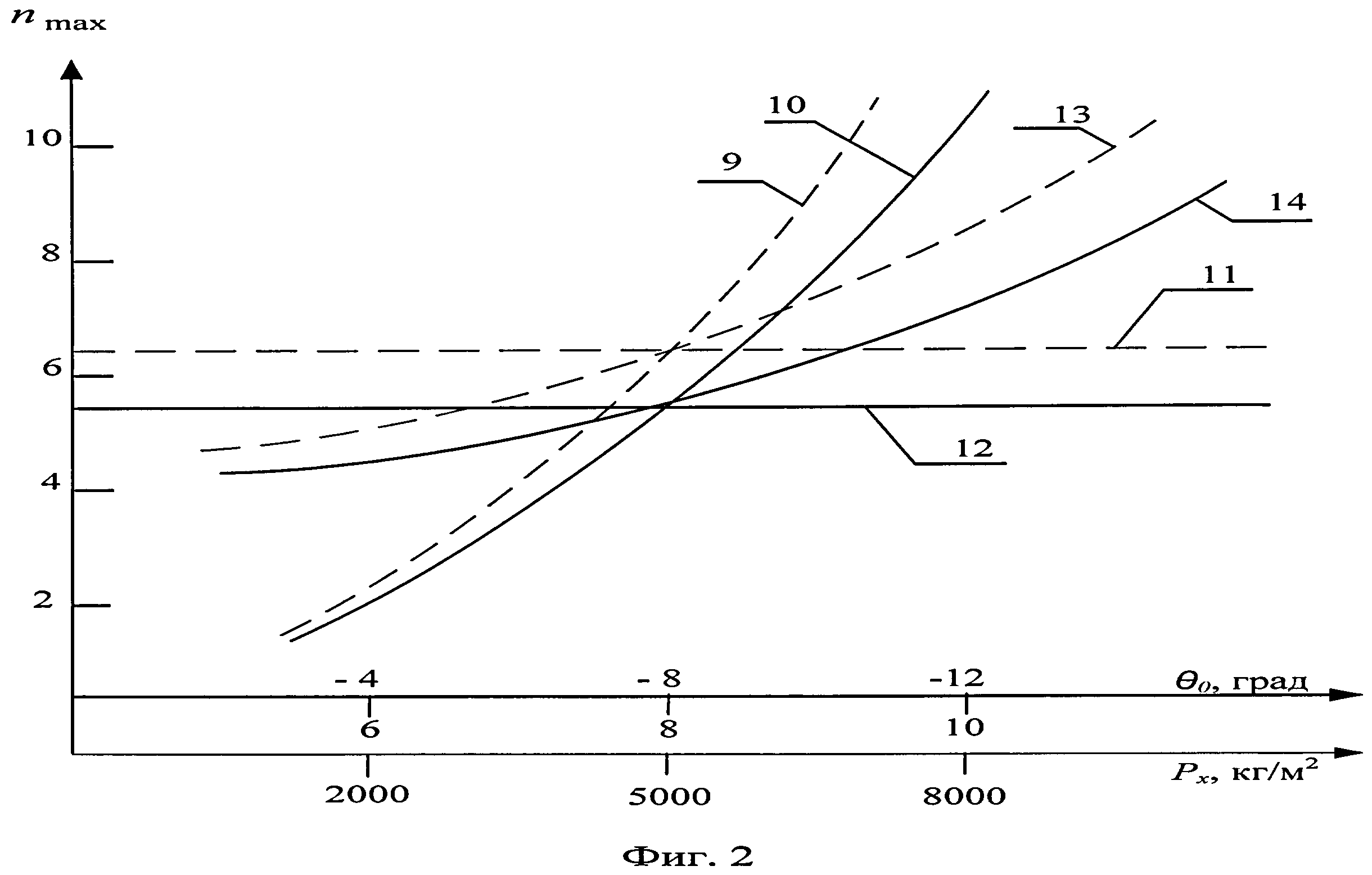

Способ соединения космических объектов в космическом пространстве
Способ определения координат места пробоя корпуса гермоотсека космического объекта частицей природного или техногенного происхождения и устройство для его реализации
Универсальная рабочая камера эйфеля аэрогазодинамической установки
Способ управления движением космического аппарата на активном участке его выведения на орбиту искусственного спутника планеты
Способ измерения линейных ускорений, угловых скоростей и ускорений на борту космического аппарата в условиях, близких к невесомости и устройство для его осуществления
Способ управления движением космического аппарата при посадке в заданную область поверхности планеты
Теплозащитное покрытие корпуса летательного аппарата
Тензометрические весы
Способ повышения надёжности изделий
Способ получения углеродных нанотрубок в сверхзвуковом потоке и устройство для его осуществления
Способ соединения космических объектов в космическом пространстве
Способ определения координат места пробоя корпуса гермоотсека космического объекта частицей природного или техногенного происхождения и устройство для его реализации
Универсальная рабочая камера эйфеля аэрогазодинамической установки
Способ управления движением космического аппарата на активном участке его выведения на орбиту искусственного спутника планеты
Способ измерения линейных ускорений, угловых скоростей и ускорений на борту космического аппарата в условиях, близких к невесомости и устройство для его осуществления
Способ управления движением космического аппарата при посадке в заданную область поверхности планеты
Теплозащитное покрытие корпуса летательного аппарата
Тензометрические весы
Способ повышения надёжности изделий
Способ получения углеродных нанотрубок в сверхзвуковом потоке и устройство для его осуществления

