Результат интеллектуальной деятельности: СПОСОБ ПОСАДКИ ВОЗДУШНОГО СУДНА С ПОМОЩЬЮ УЛЬТРАФИОЛЕТОВЫХ ПРИЕМНИКОВ И ИЗЛУЧАТЕЛЕЙ (2 ВАРИАНТА)
Вид РИД
Изобретение
Изобретение относится к области гражданской авиации и может быть использовано для повышения безопастности полетов воздушных судов (ВС).
Известен «Комплексированный универсальный всепогодный способ определения местоположения и посадки воздушного судна и устройство его осуществления» [патент №2441203 на одноименное изобретение по МПК G01C 21/24 от 29.09.2010 г.], характеризующийся использованием для определения местоположения и посадки ВС радиосигналов высокоточных современных глобальных навигационных спутниковых систем (российской - ГЛОНАСС, американской - GPS и др.)
Недостатком всех спутниковых систем является невозможность их использования при случайных или преднамеренных радиопомехах, забивающих радиосигналы навигационных спутников (НС) или при управляемых отключениях радиосигналов НС, смене на них частот радиосигналов и даже уничтожении своих или чужих НС в целях военного противодействия. Именно поэтому до настоящего времени на всех ВС имеются используемые с давних времен гироскопы (хотя и значительно уступающиие в точности спутниковой навигации и практически не обеспечивающие посадку современных ВС в условиях отсутствия видимости), обеспечивающие в качестве дополнительного запасного средства определение местоположения ВС относительно Земли и курса его полета.
Наиболее близким по технической сущности к заявленному способу является «Способ фотонной локации воздушного объекта» [патент №2497079 на изобретение с одноименным названием по МПК G01C 21/24 от 07.06.2012 г], характеризующийся до подлета ВС к зоне привода его на посадочную полосу (ПП) обнаружением ультрафиолетовыми приемниками (УФП) фотонного излучения ВС, источниками которого являются области ионизации газов возле носовой части и сопла движущегося ВС, при этом обнаружение ВС осуществляют с помощью первой и второй групп УФП, размещенных соответственно на первой и второй вертикальных синхронно и синфазно механически вращающихся вокруг своих осей в азимутальной плоскости наземных мачтах, разнесенных друг от друга на базовое расстояние, причем с помощью каждой из групп УФП обнаружение фотонного излучения ВС в каждый данный момент времени осуществляют со всех направлений угломестной плоскости за счет равномерного распределения оптических осей УФП каждой группы этой плоскости при узкой диаграмме направленности УФП в азимутальной плоскости, а за счет вращения мачт на каждом 360-градусном обзоре - последовательно со всех направлений угломестной плоскости, принимаемые каждой группой УФП излучения ВС преобразуют в каждом УФП в цифровой код, а затем регистрируют в памяти вычислителя раздельно для каждой мачты упорядочение для каждого обнаруженного излучения с фиксацией полученных азимутального угла и угла места, причем азимутальный угол по каждой мачте вычисляют по середине сектора непрерывно принимаемого излучения, формируемого в результате поворота мачт, а угол места по каждой мачте вычисляют по середине сектора непрерывно принимаемого излучения соответствующей совокупностью смежных УФП, одновременно с полученными углами азимута и места по каждому излучению для каждой мачты в памяти вычислителя регистрируют соответствующие отсчеты времени, после чего для текущего обзора отождествляют раздельно полученные данные по каждой мачте по их общим признакам углов и времени в конкретные координаты нахождения ВС, которые уточняются на очередном и последующих обзорах по признакам уточненных углов, дальности и высоты ВС, а также по появляющимся дополнительным общим признакам скорости, маневра и направления движения ВС.
Недостаток известного способа, обеспечивающего обнаружение и сопровождение ВС без использования спутниковой навигации самостоятельно в условиях радиопомех, состоит в том, что он не обеспечивает посадку ВС на посадочную полосу (ПП).
Техническим результатом и целью заявленного способа является расширение функциональных возможностей известного изобретения - обеспечение посадки ВС на ПП за счет согласованного использования ультрафиолетовой техники на земле и на борту ВС для вывода его на осевую линию ПП и на ее начало: по варианту 1 - с помощью наземных соответственно размещенных УФП фотонной локации ВС и ультрафиалетовой связи (УФ-связи), передающей на ВС соответствующие коррекции посадочной глиссады ВС; по варианту 2 - с помощью наземных соответственно размещенных ультрафиолетовых излучателей (УФИ) и бортового УФП, принимающего сигналы УФИ, указывающие на расположение ПП и используемые для формирования посадочной глиссады ВС.
Указанные технический результат и цель по варианту 1 достигаются тем, что способ посадки воздушного судна (ВС) с помощью ультрафиолетовых приемников и излучателей, характеризующийся до подлета ВС к зоне привода его на посадочную полосу (ПП) обнаружением ультрафиолетовыми приемниками (УФП) фотонного излучения ВС, источниками которого являются области ионизации газов возле носовой части и сопла движущегося ВС, при этом обнаружение ВС осуществляют с помощью первой и второй групп УФП, размещенных соответственно на первой и второй вертикальных синхронно и синфазно механически вращающихся вокруг своих осей в азимутальной плоскости наземных мачтах, разнесенных друг от друга на базовое расстояние, причем с помощью каждой из групп УФП обнаружение фотонного излучения ВС в каждый данный момент времени осуществляют со всех направлений угломестной плоскости за счет равномерного распределения оптических осей УФП каждой группы этой плоскости при узкой диаграмме направленности УФП в азимутальной плоскости, а за счет вращения мачт на каждом 360-градусном обзоре - последовательно со всех направлений угломестной плоскости, принимаемые каждой группой УФП излучения ВС преобразуют в каждом УФП в цифровой код, а затем регистрируют в памяти вычислителя раздельно для каждой мачты упорядоченно для каждого обнаруженного излучения с фиксацией полученных азимутального угла и угла места, причем азимутальный угол по каждой мачте вычисляют по середине сектора непрерывно принимаемого излучения, формируемого в результате поворота мачт, а угол места по каждой мачте вычисляют по середине сектора непрерывно принимаемого излучения соответствующей совокупностью смежных УФП, одновременно с полученными углами азимута и места по каждому излучению для каждой мачты в памяти вычислителя регистрируют соответствующие отсчеты времени, после чего для текущего обзора отождествляют раздельно полученные данные по каждой мачте по их общим признакам углов и времени в конкретные координаты нахождения ВС, которые уточняются на очередном и последующих обзорах по признакам уточненных углов, дальности и высоты ВС, а также - по появляющимся дополнительным общим признакам скорости, маневра и направления движения ВС, первую и вторую мачты устанавливают в начале посадочной полосы с разных сторон от нее при равном и безопасном от нее удалении, при котором базовое расстояние, являясь ортогональным отрезком к центральной продольной оси ПП, разделяют этой осью на две равные части, для обеспечения посадки ВС на ПП используют также УФ-связь с наземным УФ-передатчиком и бортовым УФ-приемником, с помощью которых на ВС, вошедшее в зону привода на ПП, передают данные для коррекции его полета, при этом для ВС, приближающегося к ПП слева и имеющего в связи с этим азимутальные углы направления УФП соответственно по первой и второй мачтам X1 и Х2 меньше 90 градусов, дают указания на маневр, при котором при непрерывно уменьшающейся дальности ВС от ПП эти углы будут увеличиваться до тех пор, пока при продолжающемся росте угла Х2 начнет уменьшаться угол X1, а для ВС, приближающегося к ПП справа и имеющего в связи с этим азимутальные углы X1 и Х2 больше 90 градусов, дают указания на маневр, при котором при непрерывно уменьшающейся дальности от ВС до ПП эти углы будут уменьшаться до тех пор, пока при продолжающемся уменьшении угла XI угол Х2 начнет увеличиваться, при любом приближении ВС к ПП выполняют условие X1+Х2=180 градусов, обеспечивающее прямолинейное движение ВС, сопрягающее его с осевой линией ПП вплоть до момента пролета ВС над отрезком базового расстояния при Х1=0 и Х2=180 градусов, после чего до полной остановки ВС на ПП выполняют условие его движения Х1+Х2=540 градусов, причем параллельно с азимутальными указаниями для ВС дают соответствующие указания по уменьшению его угломестных значений У1 и У2 до нулевых значений при касании ПП.
Указанные технический результат и цель по варианту 2 достигаются тем, что способ посадки ВС с помощью ультрафиолетовых приемников и излучателей, характеризующийся тем, что до подлета ВС к зоне привода его на ПП используют традиционный штурманский гироскоп для определения положения ВС относительно Земли и формирования его курса полета, для посадки ВС, вошедшего в зону привода его на ПП, используют на ВС бортовой УФП и в плоскости ПП группу ультрафиолетовых излучателей (УФИ), расположенных на безопасном для ВС расстоянии от ПП, из которых n - перед началом ПП на ее осевой линии и m - в начале ПП симметрично с разных ее сторон на линии, ортогональной к осевой линии ПП, с равным удалением от осевой линии ПП, при этом с помощью бортового УФП принимают УФ-сигналы от всех наземных УФИ, которые на ВС используют таким образом, чтобы глиссада ВС находилась строго над осевыми УФИ, а снижение и посадка ВС строго соответствовали началу ПП, которое определяют по ортогональным УФИ.
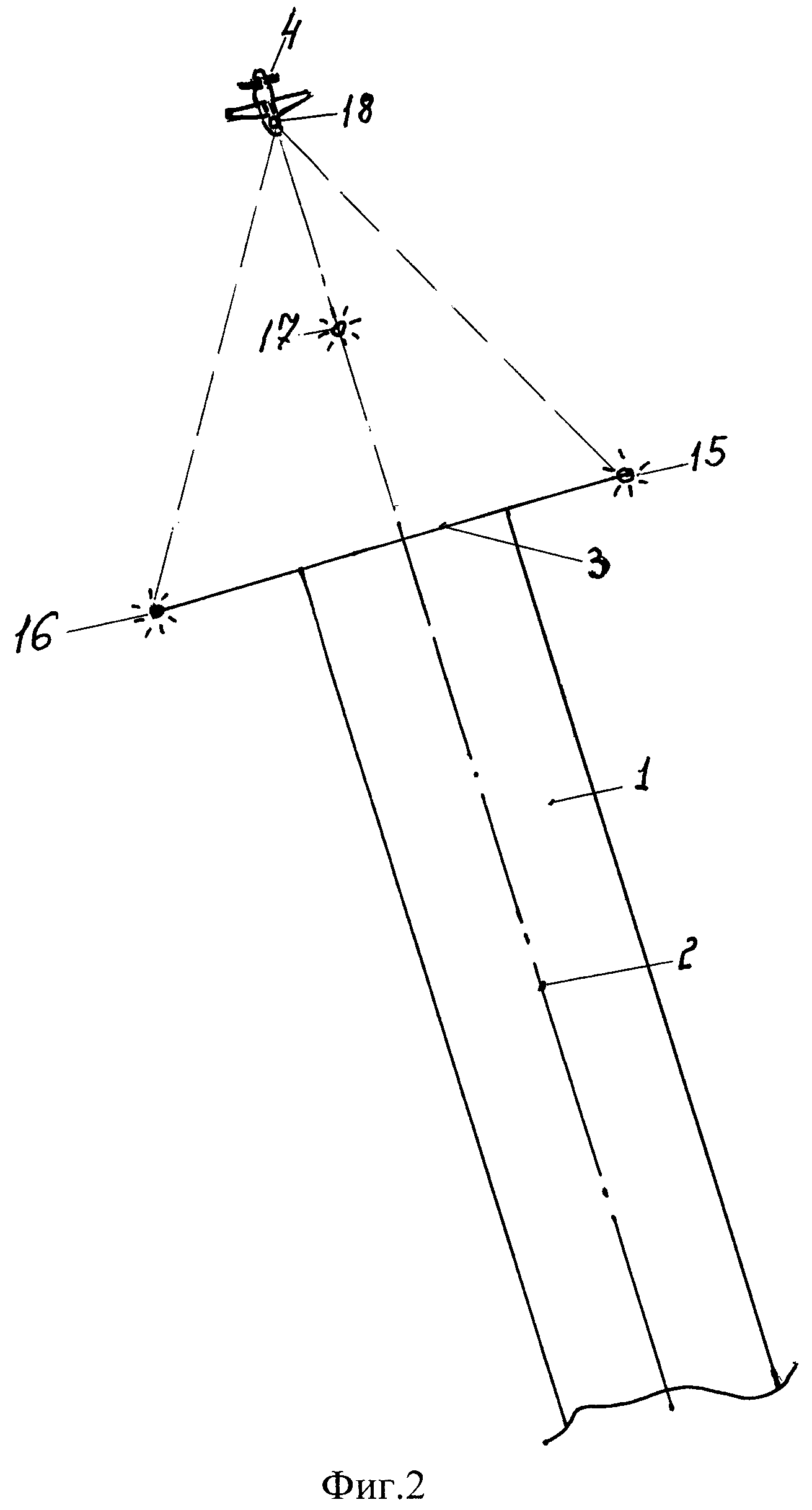
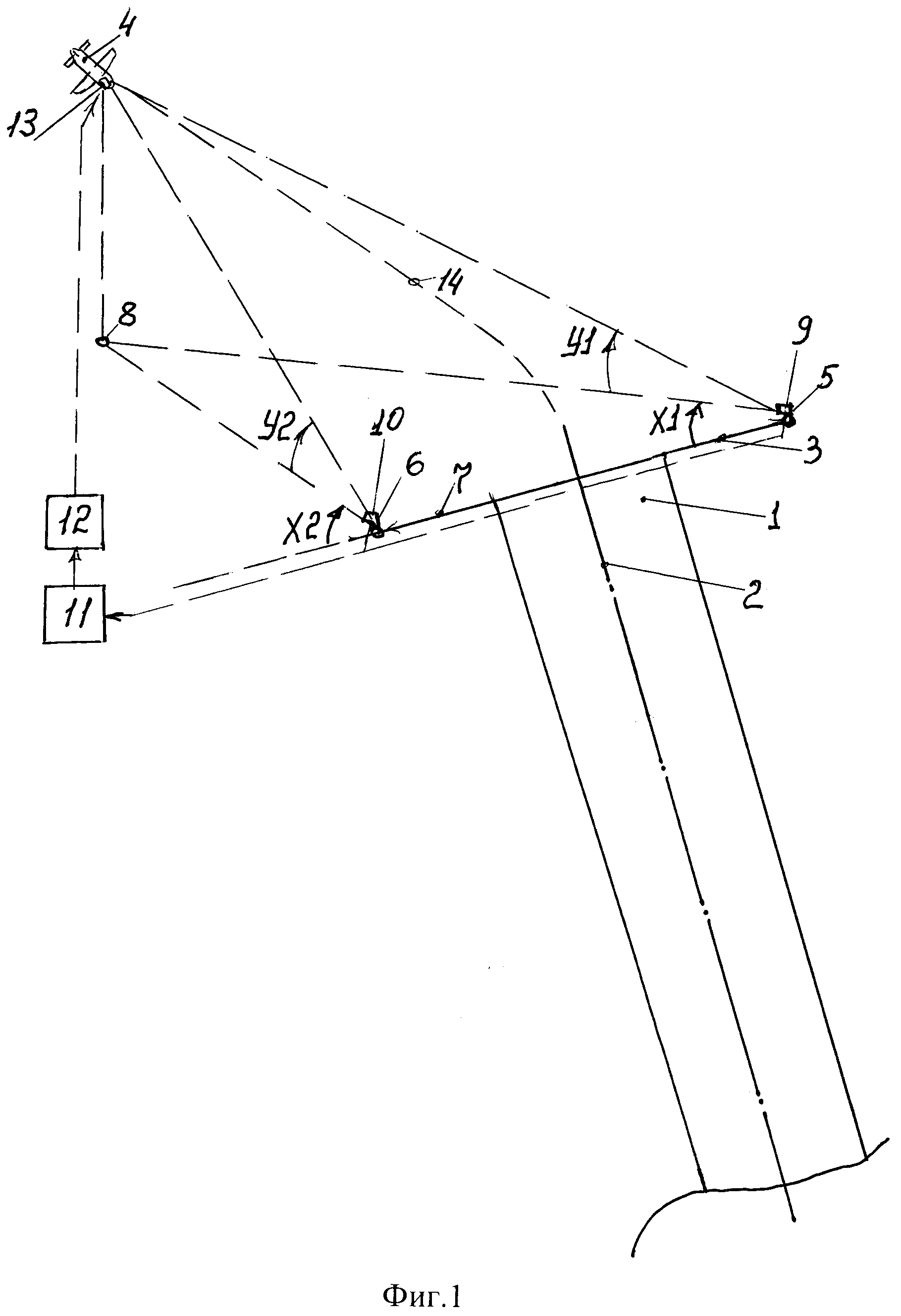
На фиг.1 и 2 соответственно представлены эскизы, поясняющие посадку ВС по варианту 1 и 2.
На фиг.1 и 2 показаны общие для двух вариантов ПП 1, ее осевая линия 2 и линия 3 в начале ПП, ортогональная осевой линии ПП, ВС 4.
Кроме того, для варианта 1 показаны (фиг.1) первая 5 и вторая 6 мачты и базовое расстояние 7 между ними, точка 8 проекции ВС на землю, азимутальные углы X1 и Х2 соответственно для первой и второй мачт, углы У1 и У2 места соответственно для первой и второй мачт, а также первая 9 и вторая 10 группы УФП, вычислитель 11, УФ-передатчик 12, УФ-приемник 13 и траектория 14 маневра ВС.
Для варианта 2 показаны, кроме того, первый 15, второй 16 и третий 17 УФИ и УФП 18 на борту ВС.
Оба варианта, уточняя и дополняя друг друга, могут использоваться одновременно. Возможно совмещение в одном приборе УФ-приемника 13 и УФП 18. Но на фиг.1 и 2 показаны отдельно, чтобы иметь большую ясность. Также для простоты на фиг.2 показан пример с тремя УФИ, хотя для надежности их количество может быть больше.
Способ посадки воздушного судна (ВС) с помощью ультрафиолетовых приемников и излучателей, характеризующийся до подлета ВС 4 к зоне привода его на посадочную полосу (ПП) 1 обнаружением ультрафиолетовыми приемниками (УФП) 9 и 10 фотонного излучения ВС 4, источниками которого являются области ионизации газов возле носовой части и сопла движущегося ВС 4, при этом обнаружение ВС 4 осуществляют с помощью первой 9 и второй 10 групп УФП, размещенных соответственно на первой 5 и второй 6 вертикальных синхронно и синфазно механически вращающихся вокруг своих осей в азимутальной плоскости наземных мачтах, разнесенных друг от друга на базовое расстояние 7, причем с помощью каждой из групп УФП обнаружение фотонного излучения ВС в каждый данный момент времени осуществляют со всех направлений угломестной плоскости за счет равномерного распределения оптических осей УФП каждой группы 9 и 10 этой плоскости при узкой диаграмме направленности УФП в азимутальной плоскости, а за счет вращения мачт 5 и 6 на каждом 360-градусном обзоре - последовательно со всех направлений угломестной плоскости, принимаемые каждой группой 9 и 10 УФП излучения ВС 4 преобразуют в каждом УФП в цифровой код, а затем регистрируют в памяти вычислителя 11 раздельно для каждой мачты 5 и 6 упорядоченно для каждого обнаруженного излучения с фиксацией полученных азимутального угла X1 и Х2 и угла места У1 и У2, причем азимутальный угол по каждой мачте 5 и 6 вычисляют по середине сектора непрерывно принимаемого излучения, формируемого в результате поворота мачт 5 и 6, а угол места У1 и У2 по каждой мачте вычисляют по середине сектора непрерывно принимаемого излучения соответствующей совокупностью смежных УФП, одновременно с полученными углами X1 и Х2 азимута и места У1 и У2 по каждому излучению для каждой мачты 5 и 6 в памяти вычислителя 11 регистрируют соответствующие отсчеты времени, после чего для текущего обзора отождествляют раздельно полученные данные по каждой мачте 5 и 6 по их общим признакам углов и времени в конкретные координаты нахождения ВС 4, которые уточняются на очередном и последующих обзорах по признакам уточненных углов, дальности и высоты ВС 4, а также - по появляющимся дополнительным общим признакам скорости, маневра 14 и направления движения ВС 4, первую 5 и вторую 6 мачты устанавливают в начале посадочной полосы 1 с разных сторон от нее при равном и безопасном от нее удалении, при котором базовое расстояние 7, являясь ортогональным отрезком 3 к центральной продольной оси 2 ПП 1, разделяют этой осью на две равные части, для обеспечения посадки ВС 4 на ПП 1 используют также УФ-связь с наземным УФ-передатчиком 12 и бортовым УФ-приемником 13, с помощью которых на ВС 4, вошедшее в зону привода на ПП 1, передают данные для коррекции его полета, при этом для ВС 4, приближающегося к ПП 1 слева и имеющего в связи с этим азимутальные углы X1 и Х2 направления УФП соответственно по первой и второй мачтам X1 и Х2 меньше 90 градусов, дают указания на маневр 14, при котором при непрерывно уменьшающейся дальности ВС 4 от ПП 1 эти углы будут увеличиваться до тех пор, пока при продолжающемся росте угла Х2 начнет уменьшаться угол X1, а для ВС 4, приближающегося к ПП 1 справа и имеющего в связи с этим азимутальные углы X1 и Х2 больше 90 градусов, дают указания на маневр 14, при котором при непрерывно уменьшающейся дальности от ВС 4 до ПП 1 эти углы будут уменьшаться до тех пор, пока при продолжающемся уменьшении угла X1 угол Х2 начнет увеличиваться, при любом приближении ВС 4 к ПП 1 выполняют условие X1+Х2=180 градусов, обеспечивающее прямолинейное движение ВС 4, сопрягающее его с осевой линией 2 ПП 1 вплоть до момента пролета ВС 4 над отрезком базового расстояния 7 при Х1=0 и Х2=180 градусов, после чего до полной остановки ВС 4 на ПП 1 выполняют условие его движения Х1+Х2=540 градусов, причем параллельно с азимутальными указаниями для ВС 4 дают соответствующие указания по уменьшению его угломестных значений У1 и У2 до нулевых значений при касании ПП.
Способ посадки ВС 4 с помощью ультрафиолетовых приемников и излучателей, характеризующийся тем, что до подлета ВС 4 к зоне привода его на ПП 1 используют традиционный штурманский гироскоп для определения положения ВС 4 относительно Земли и формирования его курса полета, для посадки ВС 4, вошедшего в зону привода его на ПП 1, используют на ВС 4 бортовой УФП 18 и в плоскости ПП 1 группу ультрафиолетовых излучателей (УФИ) 15, 16, 17, расположенных на безопасном для ВС 4 расстоянии от ПП 1, из которых n - перед началом ПП 1 на ее осевой линии 2 и m - в начале ПП 1 симметрично с разных ее сторон на линии 3, ортогональной к осевой линии 2 ПП 1, с равным удалением от осевой линии 2 ПП 1, при этом с помощью бортового УФП 18 принимают УФ-сигналы от всех наземных УФИ 15, 16, 17, которые на ВС 4 используют таким образом, чтобы глиссада ВС 4 находилась строго над осевыми УФИ 17, а снижение и посадка ВС 4 строго соответствовали началу ПП1, которое определяют по ортогональным УФИ 15 и 16.
Способ по варианту 1 осуществляется следующим образом.
Пусть, например, по каким-либо причинам (радиопомехи, забивающие радиосигналы от спутников, отказы и т.п.) невозможна спутниковая навигация и при этом отсутствует видимость ПП 1 (Фиг.1).
В этом случае возможны и обнаружение ВС 4 и его посадка на ПП1 на основе фотонной локации, для которой заблаговременно на линии 3 в начале ПП 1, ортогональной к осевой линии 2 ПП 1 с разных ее сторон и равном и безопасном удалении от осевой линии 2 (например, 100 м; чем больше, тем точнее способ) устанавливают первую 5 (с первой группой 9 УФП) и вторую 6 (со второй группой 10 УФП) мачты, синхронно и синфазно вращающиеся вокруг своих осей (например, по часовой стрелке) в азимутальной плоскости с началом отсчета углов X1 и Х2 от линии 3.
Пусть также обе группы 9 и 10 УФП имеют относительно узкую диаграмму направленности в азимутальной плоскости, а в угломестной плоскости оптические оси УФП каждой группы 9 и 10 соответственно с их диаграммами направленности равномерно распределены от 0 до 90 градусов, закрывая в сумме с учетом вращения мачт 5 и 6 все пространство. При этом чем уже диаграмма направленности УФП в угломестной плоскости (тем больше по количеству УФП в группах 9 и 10), тем точнее способ. ВСЧ при полете в своих носовой и хвостовой частях создает соответственно ударную и тепловую ионизацию газа и фотонное излучение, которое принимают группы 9 и 10 УФП, где преобразуют соответствующие сигналы в цифровой код, которые затем реагируют в памяти вычислителя 11, причем вначале раздельно по каждой мачте 5 и 6. Азимутальные углы X1 и Х2 соответственно для мачт 5 и 6 вычисляют по середине соответствующих азимутальных секторов (по каждому ВС - источнику излучения имеется свой сектор, причем по каждой мачте; 5 и 6 иногда сектора по данной мачте могут сливаться, но они разрешаются тогда по другой мачте, если соответствующие ВС не находятся неразличимо рядом) непрерывно принимаемого. Эти азимутальные сектора ограничены конкретными диаграммами направленности всех УФП данной группы 9 (10), которые могут незначительно различаться (при определении азимутальных углов X1 и Х2 используют суммарную диаграмму направленности внутри каждой группы УФП, повышая надежность при этом вычислении). По каждой мачте 5 и 6 азимутальные сектора формируются при пересечении фотонного потока диаграммой направленности соответствующей группы 9 и 10 УФП при вращении этих мачт.
Одновременно те же самые группы 9 и 10 УФП мачт 5 и 6 используют для определения углов У1 и У2 места. Но теперь угломестный сектор определяют границами крайних по вертикали УФП в каждой группе 9 и 10 (вне крайних УФП фотонное излучение отсутствует, а между ними есть). При этом углы У1 и У2 вычисляют по середине соответствующих угломестных секторов.
Вычисленные таким образом значения по каждой мачте для каждого ВС (несколько возможно до подлета ВС к зоне привода на ПП 1, при посадке должно быть только единственное ВС 4, что и рассматривается в примере и на фиг.1 и 2) запоминают в вычислителе 11 с соответствующей привязкой к конкретному отсчету системы единого времени.
Затем в вычислителе 11 для текущего обзора (на одном обороте мачт 5 и 6 вокруг своих осей - на 360 градусов) отождествляют раздельно полученные на мачтах 5 и 6 данные по их общим признакам углов и времени в конкретные координаты данного ВС 4 в данный момент времени. Как известно, однозначное определение координат ВС 4 базируется на пеленгации объекта (ВС 4) из двух известных разнесенных точек (мачты 5 и 6 с известным расстоянием между ними) при всех известных пеленгационных углах (X1, Х2, У1, У2) или на тригонометрическом расчете подобных прямоугольных треугольников со всеми известными углами и известном расстоянии 7 (базовое расстояние) между мачтами 5 и 6.
На каждом очередном обзоре (через несколько секунд) координаты ВС 4 уточняют и дополнительно определяют скорость, направление движения и маневр ВС 4, а с помощью УФ-связи (также работает в условиях радиопомех) с земли через УФ-передатчик 12 на УФ-приемник 13 на борт ВС 4 сообщают о правильности его курса или необходимом маневре 4, который контролируется описанным выше способом.
При входе ВС 4 в зону привода на ПП 1 (примерно за 20 км до ПП 1 или примерно за 1 мин до ПП 1) через УФ-связь в режиме автопилота или ручной посадки обеспечивают условия X1+Х2=180 градусов, чему соответствует прямолинейное движение ВС 4, сопрягающее его с осевой линией 2 ПП 1 вплоть до момента пролета ВС 4 над отрезком базового расстояния 7 при Х1=0 и Х2=180 градусов, после чего до полной остановки ВС 4 на ПП 1 выполняют условие его движения Х1+Х2=540 градусов. Параллельно с азимутальными указаниями для ВС 4 дают соответствующие указания по уменьшению его угломестных значений У1 и У2 до нулевых значений при касании ПП 1.
Здесь не рассматриваются неудачные маневры ВС 4, повторный заход на посадку и многие другие возможные ситуации, т.к. это выходит за рамки данной заявки.
Способ посадки ВС 4 по варианту 2 осуществляется следующим образом.
Отличие данного варианта от рассмотренного выше варианта 1 состоит в том, что для обеспечения собственно посадки ВС 4 в зоне ПП 1 вместо средств фотонной локации с мачтами 5 и 6 с группами 9 и 10 УФП используют значительно более простые ультрафиолетовые излучатели (УФИ) 15, 16, и 17 (фиг.2), расположенные на безопасном для ВС 4 расстоянии от ПП 1 (например, в 50 метрах отточки вероятного касания ВС 4 ПП 1). При этом n УФИ располагают до начала ПП 1 на ее осевой линии 2, a m УФИ располагают на линии 3 в начале ПП 1, ортогональной осевой линии 2 ПП 1 с разных ее сторон и с равным удалением. Для рассматриваемого примера n=1, a m=2, хотя для надежности их число может быть увеличено. При этом на борту ВС 4 используют бортовой УФП 18, который в зоне привода ВС 4 на ПП 1 принимает автоматически от УФИ 15, 16 и 17 сигналы, на основании которых автопилот направляет ВС 4 строго по осевой линии 2 ПП 1 над осевым УФИ 17 со снижением и посадкой ВС 4 соответственно в начале ПП 1, которое соответствует расположению ортогональных УФИ 15 и 16.
Важно отметить, что способ по варианту 1, кроме посадки ВС 4, обеспечивает раннее его обнаружение (например, за 100 км. от ПП 1) и его сопровождение и является более универсальным и целостным, чего не обеспечивают средства способа по варианту 2, работающие только в непосредственной близости от ПП 1. Поэтому в условиях невозможности использования спутниковой навигации для раннего обнаружения и дальнего привода к ПП 1 дополнительно к средствам способа 1 применяют, например, стоящий на всех ВС гироскоп, определяющий положение ВС относительно Земли.
Для повышения безопасности посадки ВС 4 целесообразно использовать совместно средства фотонной локации с мачтами 5 и 6 и группами 9 и 10 УФП с УФ-связью 12 и 13 и средства УФИ 15, 16, 17 и УФП 18.
Способ уменьшения влияния многолучевого распространения радиосигналов навигационных спутников и устройство его реализации
Способ фотонной локации воздушного объекта
Способ повышения целостности выходных сигналов бортовых спутниковых навигационных приемников
Способ локации воздушного судна
Способ повышения целостности используемых сигналов навигационных спутников с помощью локальной контрольно-корректирующей станции (лккс) с учетом влияния аномальной ионосферы
Оптическая система определения координат летательного аппарата, основанная на монофотонной уф-с технологии для навигационного обеспечения захода на посадку воздушного судна
Способ определения ионосферного шторма с помощью наземной стационарной локальной контрольно-корректирующей станции
Способ глобального мониторинга жизнеобеспечения региона с помощью единой сети локальных контрольно-корректирующих станций
Способ повышения безопасности полета и посадки воздушных судов с помощью локальной контрольно-корректирующей станции
Способ уменьшения влияния многолучевого распространения радиосигналов навигационных спутников и устройство его реализации
Способ фотонной локации воздушного объекта
Способ повышения целостности выходных сигналов бортовых спутниковых навигационных приемников
Способ локации воздушного судна
Способ повышения целостности используемых сигналов навигационных спутников с помощью локальной контрольно-корректирующей станции (лккс) с учетом влияния аномальной ионосферы
Оптическая система определения координат летательного аппарата, основанная на монофотонной уф-с технологии для навигационного обеспечения захода на посадку воздушного судна
Способ определения ионосферного шторма с помощью наземной стационарной локальной контрольно-корректирующей станции
Способ глобального мониторинга жизнеобеспечения региона с помощью единой сети локальных контрольно-корректирующих станций
Способ повышения безопасности полета и посадки воздушных судов с помощью локальной контрольно-корректирующей станции
Способ посадки летательных аппаратов с использованием спутниковой навигационной системы и система посадки на его основе

