Результат интеллектуальной деятельности: СПОСОБ ФОТОННОЙ ЛОКАЦИИ ВОЗДУШНОГО ОБЪЕКТА
Вид РИД
Изобретение
Изобретение относится к области обнаружения воздушных объектов (ВО), а также к областям автоматизированных систем управления и обработки, оптики, спутниковой навигации и вычислительной техники и может быть использовано для автоматизированного обнаружения и сопровождения ВО.
Широко известен способ радиолокации ВО (Словарь радиолюбителя, М., «Энергия», 1966 г., стр.467), характеризующийся приемом от ВО волн, обработка которых позволяет обнаруживать и сопровождать ВО. Известный способ, несмотря на очень широкое использование, обладает рядом существенных недостатков, к которым, в первую очередь, относятся:
- относительно большая сложность и стоимость РЛС;
- уязвимость самого способа радиолокации для военного применения, т.к., излучая радиосигнал, РЛС раскрывает свое местонахождение;
- относительно низкая эффективность способа радиолокации в условиях многочисленных современных способов противодействия (радиоактивным подавлением, распылением маскирующих веществ и элементов, покрытие ВО специальными веществами и материалами, делающими ВО невидимками и др.).
Наиболее близким по технической сущности к заявляемому изобретению является способ описанный в изобретении «Комплексированный универсальный всепогодный способ определения и посадки воздушного судна…» (патент №2441203 по МПК7 G01C 21/24 за 2010 г.), включающий определение местоположения в пространстве ВО с помощью ультрафиолетового приемника (УФП) фотонного излучения ВО, обработку принятого сигнала в УФП, а затем в вычислителе и определение координат нахождения этого ВО в пространстве в соответствующий момент системы единого времени (СЕВ), при этом привязку к единой системе координат и к СЕВ осуществляют с помощью локальной контрольно-корректирующей станции (ЛККС), принимающей кроме фотонного излучения ВО с помощью УФП еще от навигационных спутников (НС) действующих глобальных навигационных систем периодические радиопосылки, содержащие коды текущих значений СЕВ на момент излучения радиопосылок соответствующими НС, а также данные для точного расчета координат дислокации ЛККС и входящего в нее УФП, которые обрабатываются группой спутниковых приемников и вычислителем ЛККС.
Недостатком известного способа является относительно небольшая дальность обнаружения и сопровождения ВО (порядка 10 км), что диктовалось конкретной задачей работы вблизи посадочной полосы и посадкой ВО без использования специальных антенных средств с мачтами, необходимых для более далекой локации ВО. Но самое главное это то, что известный способ, ориентированный на прием относительно мощного ультрафиолетового излучения от бортового ультрафиолетового передатчика, не позволяет осуществлять пассивную локацию ВО без таких бортовых передатчиков (ВО и ракеты противника), а также при их выключении и неисправности.
В последние годы появились высокочувствительные УФП (такие приемные трубки имеются у заявителя настоящего изобретения), которые улавливают даже единичные фотоны на расстоянии 100 км от источника, что позволяет принимать на таких расстояниях относительно слабое ультрафиолетовое излучение от любых движущихся ВО, порождающих такое излучение от их носовой и хвостовой зон из-за ударной и температурной ионизации газа. Однако при столь высокой чувствительности УФП и при таких относительно больших расстояниях возникает задача селекции полезного сигнала в условиях многочисленных фотонных помех.
Техническим результатом и целью заявляемого изобретения является расширение функциональных возможностей прототипа, т.е. - обеспечение пассивной локации ВО, не имеющих на их борту ультрафиолетовых передатчиков, путем приема и обработки слабых фотонных излучений от носовых и хвостовых частей движущихся ВО с помощью разнесенных друг от друга двух синхронно сканирующих пространство групп УФП.
Указанные технический результат и цель достигаются тем, что способ фотонной локации воздушного объекта (ВО), характеризующийся обнаружением ультрафиолетовым приемником (УФП) фотонного излучения ВО, обработкой принятого сигнала в УФП, а затем в вычислителе и определением координат нахождения этого ВО в пространстве в соответствующий момент системы единого времени (СЕВ), при этом привязку к единой системе координат и к СЕВ осуществляют с помощью локальной контрольно-корректирующей станции (ЛККС), принимающей кроме фотонного излучения ВО с помощью УФП еще от навигационных спутников (НС) действующих глобальных навигационных систем периодические радиопосылки, содержащие коды текущих значений СЕВ на момент излучения радиопосылок соответствующими НС, а также данные для точного расчета координат дислокации ЛККС и входящего в нее УФП, которые обрабатываются группой спутниковых приемников и вычислителем ЛККС, а также тем, что обнаружение фотонного излучения ВО, источниками которого являются области ионизации газов возле носовой части и сопла движущегося ВО, осуществляют с помощью первой и второй групп УФП, размещенных соответственно на первой и второй вертикальных синхронно и синфазно механически вращающихся вокруг своих осей в азимутальной плоскости мачтах, разнесенных друг от друга на базовое расстояние, причем с помощью каждой из групп УФП обнаружение фотонного излучения ВО в каждый данный момент времени осуществляют со всех направлений 90 - градусной угломестной плоскости за счет равномерного распределения оптических осей УФП каждой группы на этих 90 градусах при узкой диаграмме направленности УФП в азимутальной плоскости, а за счет вращения мачт на каждом 360 - градусном обзоре - последовательно со всех направлений 180 - градусной угломестной плоскости, принимаемые каждой группой УФП излучения ВО при их наличии преобразуют в каждом УФП в цифровой код, а затем регистрируют в памяти вычислителя раздельно для каждой мачты упорядочение для каждого обнаруженного излучения с фиксацией полученных азимутального угла и угла места, причем азимутальный угол по каждой мачте вычисляют по середине сектора непрерывно принимаемого излучения, формируемого в результате поворота мачт, а угол места по каждой мачте вычисляют по середине сектора непрерывно принимаемого излучения соответствующей совокупностью смежных УФП, одновременно с полученными углами азимута и места по каждому излучению для каждой мачты в памяти вычислителя регистрируют соответствующие данные отсчета СЕВ и рассчитанные по полученным углам значения дальности и высоты, после чего для текущего обзора отождествляют раздельно полученные отсчеты по каждой мачте по их общим признакам углов, дальности и высоты в конкретные координаты конкретных обнаруженных ВО, которые уточняются на очередном и последующих обзорах по признакам уточненных углов, дальности и высоты ВО, а также - по появляющимся дополнительным общим признакам скорости, маневра и направления движения ВО.
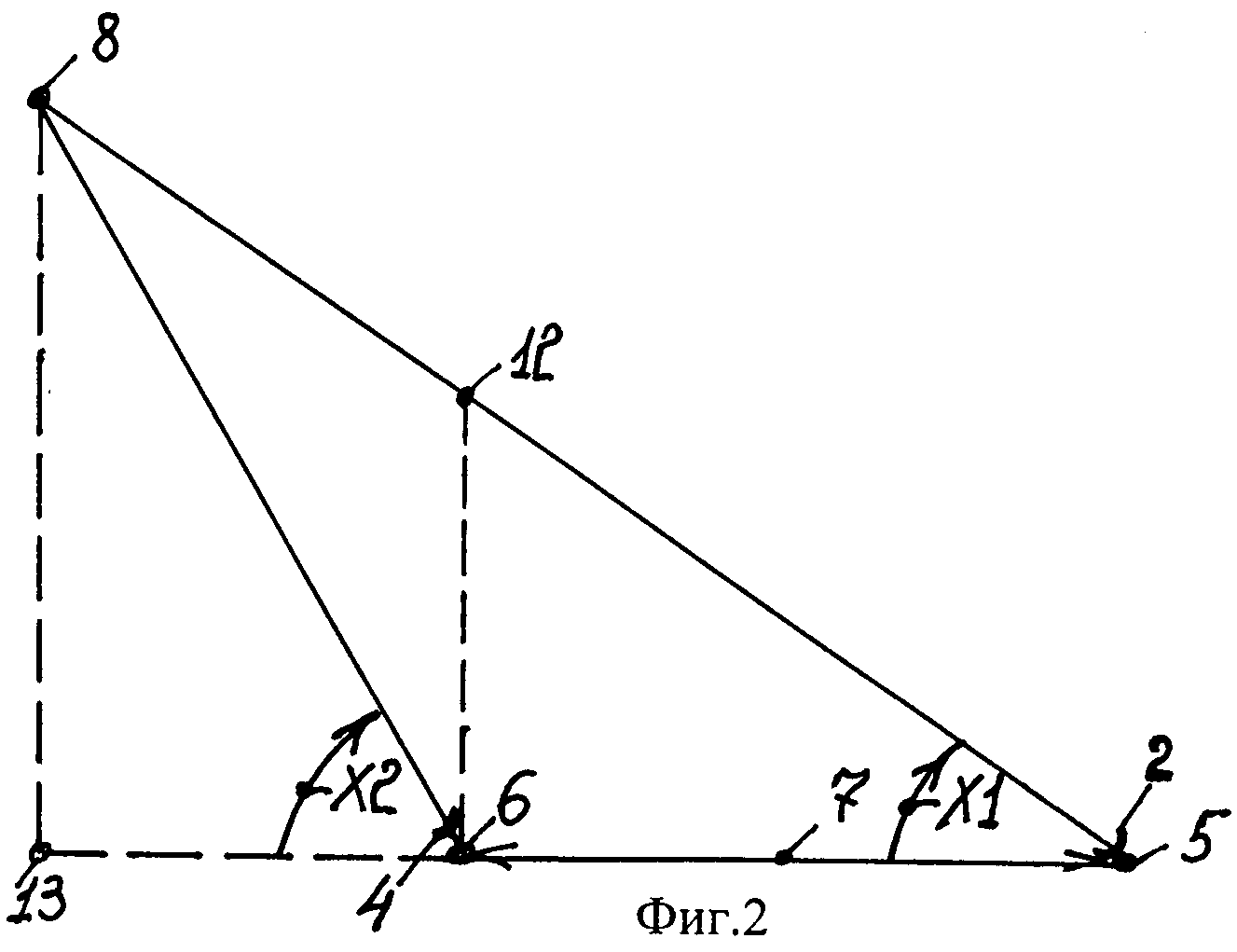
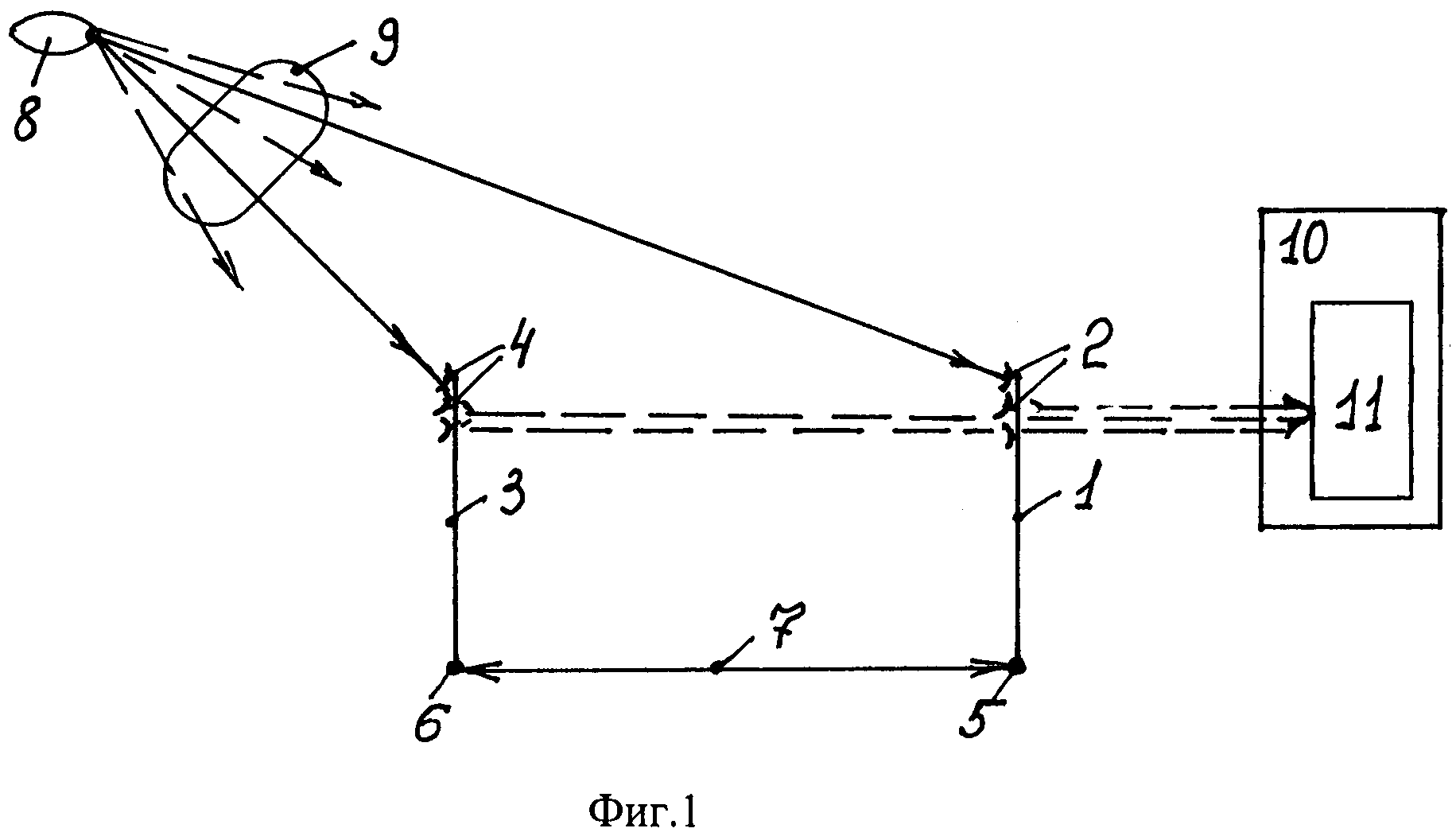
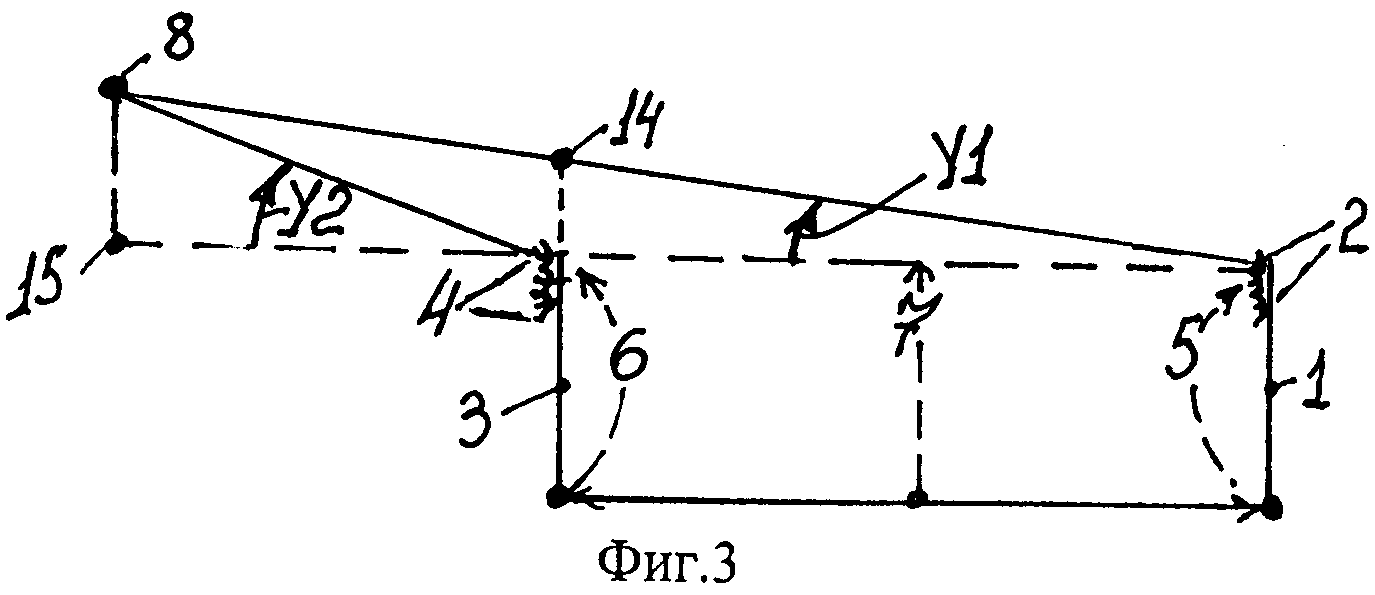
На фиг.1, 2 и 3 представлены соответственно эскизы, поясняющие осуществление способа с указанием основных элементов реализации, в аспектах азимутальной и угломестной плоскостей.
На фигурах показаны первая мачта 1 с первой группой УФП 2, вторая мачта 3 со второй группой УФП 4, точки 5 и 6 установки первой и второй мачт и база 7 их разнесения, ВО 8, ультрафиолетовое излучение 9, ЛККС 10 с вычислителем 11, а также дополнительные теоретические точки 12 и 13, образующие в азимутальной плоскости два подобных прямоугольных треугольника 5-12-6 и 5-8-13 (фиг.2), и 14 и 15, образующие в угломестной плоскости два подобных прямоугольных треугольника 5-14-6 и 5-8-15.
На фиг.2 показаны азимутальные углы X1 и Х2 поворота первой группы УФП 2 и второй группы УФП 4 соответственно относительно линии базы 7 разнесения мачт 1 и 3, а на фиг.3 - углы места У1 и У2 соответственно между линиями, соединяющими ВО 8 с УФ П2 и ВО 8 с УФ П4, и проекциями этих линий на азимутальную плоскость.
Способ фотонной локации воздушного объекта (ВО) 8, характеризующийся обнаружением ультрафиолетовыми приемниками (УФП) 2 и 4 фотонного излучения 9 этого ВО, обработкой принятого сигнала в УФП 2 и 4, а затем в вычислителе 11 ЛККС 10 и определением координат нахождения этого ВО в пространстве в соответствующий момент системы единого времени (СЕВ), при этом привязку к единой системе координат и к СЕВ осуществляют с помощью ЛККС 10, принимающей кроме фотонного излучения 9 от ВО 8 с помощью УФП 2 и 4 еще от навигационных спутников (НС) действующих глобальных навигационных систем (НС на фиг. не показаны, т.к. это выходит за рамки настоящей заявки) периодические радиопосылки, содержащие коды текущих значений СЕВ на момент излучения радиопосылок соответствующими НС, а также данные для точного расчета координат дислокации ЛККС 10 и входящих в нее УФП 2 и 4, которые обрабатываются группой спутниковых приемников и вычислителем ЛККС, и тем, что обнаружение фотонного излучения 9 от ВО 8, источниками которого являются области ионизации газов возле носовой части и сопла движущегося ВО 8, осуществляют с помощью первой и второй групп УФП 2 и 4, размещенных соответственно на первой 1 и второй 3 вертикальных синхронно и синфазно механически вращающихся вокруг своих осей 5 и 6 в азимутальной плоскости мачтах, разнесенных друг от друга на базовое расстояние 7, причем с помощью каждой из групп УФП 2 и 4 обнаружение фотонного излучения 9 от ВО 8 в каждый данный момент времени осуществляют со всех направлений 90 - градусной угломестной плоскости за счет равномерного распределения оптических осей УФП каждой группы 2 и 4 на этих 90 градусах при узкой диаграмме направленности УФП в азимутальной плоскости, а за счет вращения мачт 1 и 3 на каждом 360 - градусном обзоре - последовательно со всех направлений 180 - градусной угломестной плоскости, принимаемые каждой группой УФП 2 и 4 фотонные излучения 9 от ВО 8 при их наличии преобразуют в каждом УФП в цифровой код, а затем регистрируют в памяти вычислителя 11 раздельно для каждой мачты 1 и 3 упорядоченно для каждого обнаруженного излучения 9 с фиксацией полученных азимутального угла X1 (Х2) и угла У1 (У2) места, причем азимутальный угол по каждой мачте вычисляют по середине сектора непрерывно принимаемого излучения 9, формируемого в результате поворота мачт 1 и 3, а угол места по каждой мачте вычисляют по середине сектора непрерывно принимаемого излучения соответствующей совокупностью смежных УФП 2 и 4, одновременно с полученными углами азимута X1 (Х2) и места У1 (У2) по каждому излучению 9 для каждой мачты 1 и 3 в памяти вычислителя 11 регистрируют соответствующие данные отсчета СЕВ и рассчитанные по полученным углам значения дальности и высоты, после чего для текущего обзора отождествляют раздельно полученные отсчеты по каждой мачте 1 и 3 по их общим признакам углов, дальности и высоты в конкретные координаты конкретных обнаруженных ВО, которые уточняются на очередном и последующих обзорах по признакам уточненных углов, дальности и высоты ВО, а также - по появляющимся дополнительным общим признакам скорости, маневра и направления движения ВО.
Способ осуществляется следующим образом.
Допустим вращение первой 1 и второй 3 мачте размещенными на них соответственно первой 2 и второй 4 групп УФП (фиг.1, 2) осуществляется в азимутальной плоскости (параллельно земной поверхности) синхронно и синфазно (с одинаковой скоростью, в одну сторону, например, один оборот/сек, по часовой стрелке и с одинаковым начальным отсчетом азимутальных углов X1 и Х2 - от прямой линии, совпадающей с линией базы 7) и пусть на каждой мачте 1 и 3 установлено по 18 (n=18) узкоугольных 5-градусных УФП, покрывающих вместе 90 градусов угломестной плоскости (ортогональной азимутальной плоскости) за счет последовательного смещения диаграммы направленности (или оптической оси) каждого смежного УФП относительног ближайшего на 5 градусов. Пусть также все УФП в азимутальной плоскости имеют также 5-градусную диаграмму направленности.
Тогда за счет вращения мачт 1 и 3 при попадании непрерывного излучения 9 от ВО 8 в 5-градусный сектор восприятия какими-то УФП (вначале одной группы 2 или 4, а затем другой, в зависимости оттого, с какой стороны от базы 7 находится ВО 8, кроме сучаев, когда ВО 8 находится на линии базы 7, т.е. на одном азимуте) воспринимающие УФП преобразуют параллельно аналоговый сигнал излучения 9 в цифровую форму с помощью аналогово-цифрового преобразователя (АЦП), формируя на выходе каждого воспринимающего УФП пачку смежных цифровых отсчетов (обычно 5-10 отсчетов в зависимости от диаграммы направленности УФП и скорости вращения мачт 1 и 3), которые затем регистрируют в памяти вычислителя 11 раздельно для каждой мачты 1 и 3 с фиксацией азимутального угла X1 (Х2) и одновременно угла места У1 (У2), т.к. в рассматриваемом примере при использовании 18 УФП, рассредоточенных в угломестной плоскости, воспринимающие излучение 9 УФП однозначно указывают на угол места У1 (У2). Азимутальный угол X1 (Х2) по каждой мачте 1 и 3 с помощью вычислителя 11 вычисляют по середине сектора непрерывно принимаемого излучения 9 - по середине пачки смежных цифровых отсчетов, а угол места У1 (У2) по середине сектора воспринимающей излучение 9 совокупности смежных УФП 2 (4). Одновременно с полученными углами азимута и места по каждой мачте 1 (3) раздельно по каждому излучению данного ВО 8 (для других ВО аналогично) при их регистрации регистрируют отсчеты СЕВ.
По полученным углам в вычислителе 11 при известном расстоянии базы 7 и известном значении углов XI и Х2 рассчитывают значения дальности до ВО 8 от точки 5 и точки 6, а также его высоту. Для прямоугольного треугольника 5-12-6 через косинус X1 и синус X1 получают стороны 5-12 и 6-12, а затем через пропорции подобных прямоугольных треугольников 5-12-6 и 5-8-13 при известном значении угла Х2 определяются любые стороны треугольника 5-8-13, в т.ч. сторона 5-8, представляющая собой проекцию наклонной дальности на азимутальную плоскость. Аналогично, зная углы У1 и У2 и величину базы 7, в угломестной плоскости определяют величину отрезка 8-15, т.е. высоту ВО 8 и величину 5-8, т.е. наклонную дальность до ВО 8 от точки 5. После этого для текущего обзора (одного полного оборота мачт 1 и 3) отождествляют раздельно полученные отсчеты по каждой мачте по их общим признакам углов, дальности и высоты в конкретные координаты конкретных обнаруженных ВО 8, которые уточняются на очередном и последующих обзорах по признакам уточненных углов, дальности и высоты, а также - по дополнительным признакам скорости, маневра и направления движения.
С целью уменьшения количества УФП в группах 2 и 4 применяют на каждой мачте m широкоугольных УФП 2 и 4, покрывающих вместе 90 градусов по углу места, например, два УФП (m=2) с диаграммой направленности каждой 45 градусов. Кроме того на каждой мачте 1 и 3 применяют d узкоугольных УФП, например, один 5-градусный УФП (d=1), который активизируют на конкретном азимуте при обнаружении излучения 9 конкретным широкоугольным УФП, причем активизируют в соответствующем 45-градусном секторе для уточнения угла места путем механического или электронного сканирования узкоугольного УФП. Выигрыш по стоимости изделия (вместо n=18 применяют всего три УФП) осуществляется за счет удлинения времени обработки из-за необходимости уточнять значения угла места.
Для максимального выигрыша времени приема и обработки излучения 9 (за счет существенного удорожания изделия) обе группы УФП 2 и 4 размещают на двух полусферах, обеспечивая прием излучений со всех направлений сразу.
Способ уменьшения влияния многолучевого распространения радиосигналов навигационных спутников и устройство его реализации
Способ повышения целостности выходных сигналов бортовых спутниковых навигационных приемников
Способ локации воздушного судна
Способ повышения целостности используемых сигналов навигационных спутников с помощью локальной контрольно-корректирующей станции (лккс) с учетом влияния аномальной ионосферы
Способ посадки воздушного судна с помощью ультрафиолетовых приемников и излучателей (2 варианта)
Оптическая система определения координат летательного аппарата, основанная на монофотонной уф-с технологии для навигационного обеспечения захода на посадку воздушного судна
Способ определения ионосферного шторма с помощью наземной стационарной локальной контрольно-корректирующей станции
Способ глобального мониторинга жизнеобеспечения региона с помощью единой сети локальных контрольно-корректирующих станций
Способ повышения безопасности полета и посадки воздушных судов с помощью локальной контрольно-корректирующей станции
Способ уменьшения влияния многолучевого распространения радиосигналов навигационных спутников и устройство его реализации
Способ повышения целостности выходных сигналов бортовых спутниковых навигационных приемников
Способ локации воздушного судна
Способ повышения целостности используемых сигналов навигационных спутников с помощью локальной контрольно-корректирующей станции (лккс) с учетом влияния аномальной ионосферы
Способ посадки воздушного судна с помощью ультрафиолетовых приемников и излучателей (2 варианта)
Оптическая система определения координат летательного аппарата, основанная на монофотонной уф-с технологии для навигационного обеспечения захода на посадку воздушного судна
Способ определения ионосферного шторма с помощью наземной стационарной локальной контрольно-корректирующей станции
Способ глобального мониторинга жизнеобеспечения региона с помощью единой сети локальных контрольно-корректирующих станций
Способ повышения безопасности полета и посадки воздушных судов с помощью локальной контрольно-корректирующей станции
Способ посадки летательных аппаратов с использованием спутниковой навигационной системы и система посадки на его основе

