Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ЭКСКОВАТРА-ДРАГЛАЙНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к горной промышленности и может быть использовано для управления движением ковша драглайна при копании.
Известен способ управления движением ковша драглайна, включающий регулирование натяжения тяговых канатов и ограничение частоты вращения тяговой лебедки в зависимости от усилия в подъемных и тяговых канатов, устройство для осуществления этого способа содержит регулятор натяжения тяговых канатов, блок регулирования частоты вращения привода тяговой лебедки, на вход которого подключены два последовательно соединенных блока ограничения частоты вращения тяговой лебедки, которые управляются выходными сигналами преобразователей усилия натяжения подъемных и тяговых канатов [1].
Недостатком этого способа и устройства является то, что они не обеспечивают надежного устранения возникновения аварийного режима «срыв ковша с бровки забоя», т.к. они не обеспечивают остановку ковша и отрыв его от поверхности забоя при приближении ковша к бровке забоя на расстояние, при котором может произойти срыв ковша с бровки забоя, причиной которого может быть наличие слабины в подъемных канатах (ПК).
Наиболее близкими по технической сущности к предлагаемому способу управления движением ковша драглайна и устройству для его осуществления являются Способ управления движением ковша экскаватора-драглайна, включающий задание сигналов управления по частоте вращения приводов подъема, тяги и поворота, регулирование частоты вращения этих приводов, формирование по заданным и текущим значениям усилий натяжения в подъемных и тяговых канатах сигналов управления по усилию в этих канатах, затем эти сигналы по усилию сравнивают с соответствующими сигналами по частоте вращения приводов подъема и тяги с последующим выделением из сравниваемых сигналов наибольших сигналов, выделенный сигнал управления приводом подъема подают на вход блока регулирования частоты вращения привода подъема непосредственно, выделенный сигнал управления приводом тяги подают на вход блока регулирования частоты вращения привода тяги через первый основной управляемый ключ, сигнал управления приводом поворота подают на вход блока регулирования частоты вращения привода поворота через второй основной управляемый ключ, а также измеряют текущие длины подъемных и тяговых канатов. И устройство для управления движением ковша экскаватора-драглайна, содержащее блоки регулирования частоты вращения приводов подъема, тяги и поворота, блоки выделения сигналов управления приводами подъема и тяги, входы которых подключены к выходам соответствующих задатчиков частоты вращения этих приводов и регуляторов усилий натяжения подъемных и тяговых канатов, первый вход каждого из последних подключен к выходу соответствующего задатчика усилия натяжения канатов, а второй - к выходу соответствующего преобразователя усилия натяжения канатов, при этом вход блока регулирования частоты вращения привода подъема соединен непосредственно с выходом блока выделения сигнала управления приводом подъема, вход блока регулирования частоты вращения привода тяги соединен с выходом первого основного управляемого ключа, а вход блока регулирования частоты вращения привода поворота соединен через второй основной управляемый ключ с выходом задатчика частоты вращения этого привода, а также преобразователи длины подъемных и тяговых канатов [2].
Известные способ и устройство обеспечивают устранение слабины в ПК, а также не позволяют производить перемещение ковша по забою при появлении слабины в ПК за счет автоматической остановки двигателей тяги и поворота при наличии слабины в ПК путем отключения сигналов задатчиков частоты вращения этих двигателей от блоков регулирования частоты вращения привода тяги и поворота, что способствует устранению срыва ковша с бровки забоя. Этот способ управления движением ковша драглайна и устройство для его осуществления взяты авторами в качестве прототипа.
К недостаткам известных способа и устройства можно отнести:
1. Они предусматривают остановку двигателей тяги и поворота при слабине в ПК независимо от местоположения ковша в забое. Однако при значительном удалении ковша от бровки забоя, когда срыв ковша не возможен, эти остановки нецелесообразны и увеличивают время копания, что снижает производительность драглайна.
2. Они не обеспечивают отрыв ковша от поверхности забоя при приближении его к бровке забоя на расстояние, при котором может произойти срыв ковша с бровки забоя, что снижает надежность устранения аварийного режима.
3. Они не обеспечивают ограничение скорости ковша при приближении его к бровке забоя. Это не позволяет снизить нагрузки, возникающие в рабочем оборудовании и механизмах драглайна при обрушении бровки забоя, а также не позволяют машинисту лучше контролировать приближение ковша к бровке забоя для устранения аварийного режима.
Задача изобретения - повышение надежности и долговечности рабочего оборудования и механизмов драглайна за счет ограничения скорости ковша и отрыва его от поверхности забоя при приближении к бровке забоя, обеспечивающих снижение нагрузок и увеличение надежности устранения срыва ковша с бровки забоя, а также повышение производительности драглайна за счет исключения нецелесообразных остановок ковша на значительном удалении его от бровки забоя, при котором срыв ковша не возможен, приводящих к увеличению времени копания.
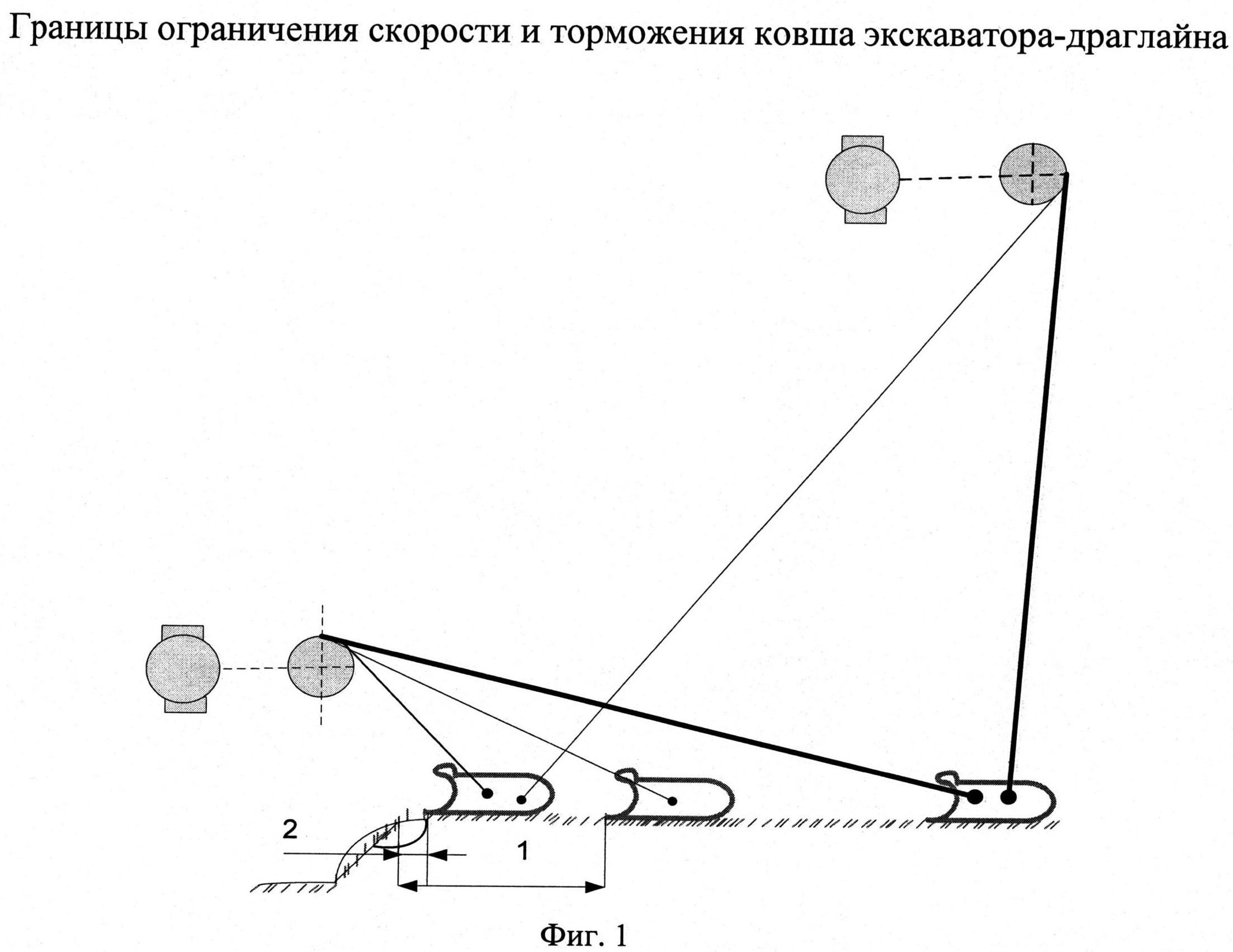
Это достигается тем, что в способе управления движением ковша экскаватора-драглайна, включающем задание сигналов управления по частоте вращения приводов подъема, тяги и поворота, регулирование частоты вращения этих приводов, формирование по заданным и текущим значениям усилий натяжения в подъемных и тяговых канатах сигналов управления по усилию в этих канатах, затем эти сигналы по усилию сравнивают с соответствующими сигналами по частоте вращения приводов подъема и тяги с последующим выделением из сравниваемых сигналов наибольших сигналов, выделенный сигнал управления приводом подъема подают на вход блока регулирования частоты вращения привода подъема непосредственно, выделенный сигнал управления приводом тяги подают на вход блока регулирования частоты вращения привода тяги через первый основной управляемый ключ, сигнал управления приводом поворота подают на вход блока регулирования частоты вращения привода поворота через второй основной управляемый ключ, а также измеряют текущие длины подъемных и тяговых канатов, дополнительно задают расстояния до двух границ положения ковша в забое относительно бровки забоя, где на фиг.1 граница 1 соответствует границе ограничения скорости ковша, а граница 2 - границе торможения ковша при приближении его к бровке забоя, задают длины тяговых канатов, соответствующие положению ковша на указанных границах и длину подъемных канатов, соответствующую положению ковша на границе торможения ковша, задают уровень ограничения сигнала управления приводом тяги при положении ковша на границе ограничения скорости ковша и дополнительное усилие натяжения подъемных канатов при положении ковша на границе торможения ковша. В процессе копания сравнивают текущие длины подъемных и тяговых канатов с их заданными значениями до указанных границ.
При этом:
- если текущая длина тяговых канатов больше или равна заданной длине этих канатов, соответствующей положению ковша на границе ограничения его скорости, и текущая длина подъемных канатов меньше заданной длины этих канатов, соответствующей положению ковша на границе торможения ковша, то выделенный сигнал управления приводом тяги подают на вход блока регулирования частоты вращения привода тяги без ограничения этого сигнала;
- если текущая длина тяговых канатов меньше заданной длины этих канатов, соответствующей положению ковша на границе ограничения его скорости, но больше заданной длины этих канатов, соответствующей положению ковша на границе торможения ковша, а текущая длина подъемных канатов меньше заданной длины этих канатов, соответствующей положению ковша на границе торможения ковша, то выделенный сигнал управления приводом тяги ограничивают на заданном уровне, обеспечивая ограничение скорости ковша;
- если текущая длина тяговых канатов меньше заданной длины этих канатов, соответствующей положению ковша на границе торможения ковша, а текущая длина подъемных канатов больше заданной длины этих канатов, соответствующей положению ковша на границе торможения ковша, то блокируют сигналы управления приводами тяги и поворота, обеспечивая торможение и остановку ковша, а также увеличивают усилие натяжения подъемных канатов и производят отрыв ковша от поверхности забоя.
При этом устройство для управления движением ковша экскаватора-драглайна, содержащее блоки регулирования частоты вращения приводов подъема, тяги и поворота, блоки выделения сигналов управления приводами подъема и тяги, входы которых подключены к выходам соответствующих задатчиков частоты вращения этих приводов и регуляторов усилий натяжения подъемных и тяговых канатов, первый вход каждого из последних подключен к выходу соответствующего задатчика усилия натяжения канатов, а второй - к выходу соответствующего преобразователя усилия натяжения канатов, при этом вход блока регулирования частоты вращения привода подъема соединен непосредственно с выходом блока выделения сигнала управления приводом подъема, вход блока регулирования частоты вращения привода тяги соединен с выходом первого основного управляемого ключа, а вход блока регулирования частоты вращения привода поворота соединен через второй управляемый ключ с выходом задатчика частоты вращения этого привода, а также преобразователи длины подъемных и тяговых канатов, снабжено тремя нелинейными элементами, четырьмя дополнительными управляемыми ключами, элементом ограничения сигнала управления приводом тяги и задатчиком дополнительного натяжения подъемных канатов, при этом вход первого нелинейного элемента подключен к выходу преобразователя длины подъемных канатов, а входы второго и третьего нелинейных элементов - к выходу преобразователя длины тяговых канатов, выход первого нелинейного элемента подключен на управляющий вход первого дополнительного ключа, выход второго нелинейного элемента подключен на управляющие входы второго и третьего дополнительных ключей, выход третьего нелинейного элемента соединен с управляющим входом первого и второго основных ключей и четвертого дополнительного ключа. Вход первого основного ключа подключен к выходу блока выделения сигнала управления приводом тяги через первый и второй дополнительные ключи, а также через первый дополнительный ключ, элемент ограничения сигнала управления приводом тяги и третий дополнительный ключ. Четвертый дополнительный ключ включен между выходом задатчика дополнительного натяжения подъемных канатов и третьим входом регулятора натяжения подъемных канатов.
Способ управления движением ковша экскаватора-драглайна осуществляют следующим образом. В процессе копания задают сигналы управления по частоте вращения приводов подъема, тяги и поворота, регулируют частоту вращения этих приводов, формируют по заданным и текущим значениям усилий натяжения подъемных и тяговых канатов сигналы управления приводами подъема и тяги по усилиям натяжения в в подъемных и тяговых канатах, затем эти сигналы по усилию сравнивают с соответствующими сигналами управления по частоте вращения подъема и тяги, выделяют из сравниваемых сигналов наибольшие сигналы управления приводами подъема и тяги. Выделенный сигнал управления приводом подъема непосредственно подают на вход блока регулирования частоты вращения привода подъема.
Задают расстояния до двух границ положения ковша на поверхности забоя относительно бровки забоя. Заданное расстояние до 1 границы положения ковша lЗАД.1 соответствует границе ограничения скорости ковша при приближении его к бровке забоя. Заданное расстояние до 2 границы положения ковша lЗАД.2 соответствует границе торможения ковша при приближении его к бровке забоя. На основании этих заданных расстояний задают длины тяговых канатов (lТ.1 и lТ.2), соответствующие положению ковша на границе ограничения скорости ковша и на границе торможения ковша. Задают длину подъемных канатов (lП2), соответствующую положению ковша на границе торможения ковша. Задают также уровень ограничения сигнала управления приводом тяги при положении ковша на границе ограничения его скорости и дополнительное усилие натяжения подъемных канатов при положении ковша на границе его торможения. В процессе копания измеряют текущие длины подъемных и тяговых канатов, которые сравнивают с их заданными значениями.
Если текущая длина тяговых канатов больше или равна заданной длине этих канатов, соответствующей положению ковша на границе ограничения его скорости, и текущая длина подъемных канатов меньше заданной длины, соответствующей положению ковша на границе торможения ковша, то выделенный сигнал управления приводом тяги подают на вход блока регулирования частоты вращения привода тяги без ограничения этого сигнала.
Если текущая длина тяговых канатов меньше заданной длины этих канатов, соответствующей положению ковша на границе ограничения его скорости, но больше заданной длины этих канатов, соответствующей положению ковша на границе торможения ковша, а текущая длина подъемных канатов меньше заданной длины этих канатов, соответствующей положению ковша на границе торможения ковша, то выделенный сигнал управления приводом тяги ограничивают на заданном уровне, обеспечивая ограничение скорости ковша.
Если текущая длина тяговых канатов меньше заданной длины этих канатов, соответствующей положению ковша на границе его торможения, а текущая длина подъемных канатов больше заданной длины этих канатов, соответствующей положению ковша на границе его торможения, то блокируют сигналы управления приводом тяги и поворота, обеспечивая торможение и остановку ковша, а также увеличивают усилие натяжения подъемных канатов и производят отрыв ковша от поверхности забоя.
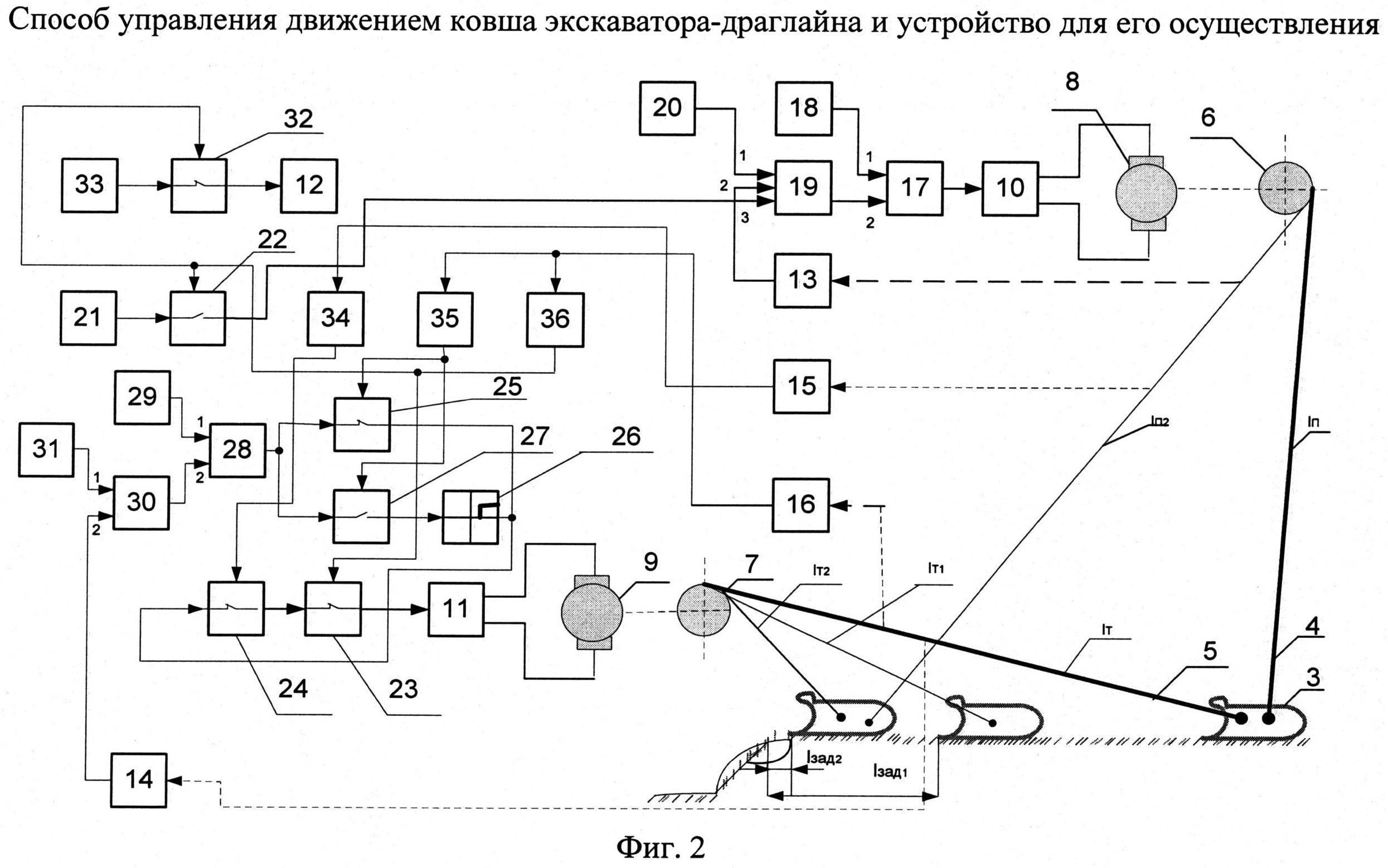
На фиг.2 представлена блок-схема устройства для осуществления предлагаемого способа управления движением ковша драглайна.
Устройство для управления движением ковша экскаватора-драглайна состоит из рабочего оборудования в виде ковша 3 с подъемными и тяговыми канатами 4 и 5, подъемной и тяговой лебедок 6 и 7, механически связанных с двигателями 8 и 9, блоков 10 и 11 регулирования частоты вращения приводов подъема и тяги, блока 12 регулирования частоты вращения привода поворота драглайна (привод поворота драглайна на фигуре не показан), преобразователей 13, 14 усилий натяжения подъемных и тяговых канатов, преобразователей 15 и 16 длины этих канатов. Вход блока 10 регулирования частоты вращения поворота подъема соединен с выходом блока 17 выделения максимального сигнала управления приводом подъема, первый вход блока 17 подключен к выходу задатчика 18 частоты вращения этого привода, а второй его вход - к выходу регулятора 19 усилия натяжения подъемных канатов, на первый вход которого поступает сигнал с задатчика 20 усилия натяжения подъемных канатов, на второй его вход - с преобразователя 13 усилия натяжения подъемных канатов, а на третий вход - с дополнительного задатчика 21 усилия натяжения подъемных канатов через ключ 22.
Вход блока 11 регулирования частоты вращения привода тяги соединен с выходом первого основного ключа 23, вход которого через дополнительные ключи 24, 25, а также ключ 24, элемент 26 ограничения сигнала управления приводом тяги и дополнительный ключ 27 подключен к выходу блока 28 выделения сигнала управления приводом тяги. Входы блока 28 соединены с выходом задатчика 29 частоты вращения привода тяги и регулятора 30 усилия натяжения тяговых канатов, входы которого соединены с выходом задатчика 31 и преобразователя 14 усилия натяжения тяговых канатов. Вход блока 12 регулирования частоты вращения привода поворота через второй основной ключ 32 подключен к задатчику 33 частоты вращения привода поворота. Управление ключами производится с помощью нелинейных элементов 34, 35, 36. При этом вход первого нелинейного элемента 34 подключен к выходу преобразователя 15 длины подъемных канатов, а входы нелинейных элементов 35 и 36 - к выходу преобразователя 16 длины тяговых канатов. Выход первого нелинейного элемента 34 подключен на управляющий вход дополнительного ключа 24, выход второго нелинейного элемента 35 подключен на управляющие входы ключей 25, 27. Выход третьего нелинейного элемента 36 подключен на управляющие входы ключей 22, 23 и 32.
В качестве регуляторов 19 и 30 натяжения подъемных и тяговых канатов могут быть использованы типовые ПИД-регуляторы.
В качестве преобразователя 15 длины подъемных канатов может быть использован сельсинный преобразователь длины канатов, применяемый в системе защиты стрелы драглайна от «переподъема» ковша, а в качестве преобразователя 16 длины тяговых канатов может быть использован сельсинный преобразователь длины канатов, применяемый в системе защиты драглайна от «перетяги» ковша.
В качестве нелинейных элементов 34, 35, 36 могут быть использованы нелинейные элементы, реализующие типовую нелинейную характеристику «зона нечувствительности».
В качестве элемента 26 ограничения сигнала управления приводом тяги может быть использован стабилитрон.
Перед началом работы производят настройку функциональных элементов устройства.
На выходах задатчиков 20 и 31 натяжения подъемных и тяговых канатов устанавливаются напряжения, соответствующие начальному натяжению этих канатов, при котором слабина в канатах отсутствует  ,
,  .
.
На выходе дополнительного задатчика 21 дополнительного натяжения подъемных канатов устанавливается напряжение, соответствующее дополнительному натяжению подъемных канатов, равное весу груженого ковша с породой  , обеспечивающему отрыв груженого ковша от поверхности забоя.
, обеспечивающему отрыв груженого ковша от поверхности забоя.
Заданное расстояние от бровки забоя, соответствующее положению ковша на границе ограничения его скорости, может быть принято равным lЗАД.1=(6, …, 8)м, уточнено с учетом границы формирования обрушения бровки забоя.
Заданное расстояние от бровки забоя, соответствующее положению ковша на границе его торможения, может быть принято равным lЗАД.2=(3, …, 5)м и уточнено с учетом пути торможения груженого ковша.
Напряжение «зоны нечувствительности» на входе нелинейного элемента 34 устанавливается равным напряжению на выходе преобразователя 15 длины подъемных канатов, соответствующему заданной длине подъемных канатов, соответствующей положению ковша на границе его торможения: 
Напряжение «зоны нечувствительности» на входе нелинейного элемента 35 устанавливается равным напряжению на выходе преобразователя 16 длины тяговых канатов, соответствующему длине тяговых канатов до положения ковша на границе ограничения скорости ковша:  .
.
Напряжение «зоны нечувствительности» на входе нелинейного элемента 36 устанавливается равным напряжению на выходе преобразователя 16 длины тяговых канатов, соответствующему длине тяговых канатов до положения ковша на границе торможения ковша:  .
.
Уровень ограничения сигнала управления приводом тяги при приближении ковша к бровке забоя может быть принят равным  (
( - сигнал управления приводом тяги, соответствующий номинальной скорости ковша).
- сигнал управления приводом тяги, соответствующий номинальной скорости ковша).
Ограничение скорости ковша производится только в направлении приближения ковша к бровке забоя, в направлении удаления ковша от бровки забоя ограничение скорости не производится.
Устройство работает следующим образом.
После посадки ковша на поверхность забоя на выходах регуляторов 19 и 30 натяжения подъемных и тяговых канатов в функции сигнала рассогласования между заданными и текущими усилиями натяжения подъемных и тяговых канатов формируются сигналы управляющих воздействий по усилиям в подъемных и тяговых канатах:


где  и
и  - напряжения на выходе задатчика 20 натяжения подъемных канатов и на выходе задатчика 31 натяжения тяговых канатов, соответствующие их начальному натяжению, при котором слабина в канатах отсутствует;
- напряжения на выходе задатчика 20 натяжения подъемных канатов и на выходе задатчика 31 натяжения тяговых канатов, соответствующие их начальному натяжению, при котором слабина в канатах отсутствует;
 и
и  - напряжения на выходе преобразователя 13 натяжения подъемных канатов и преобразователя 14 натяжения тяговых канатов, соответствующие их текущему натяжению.
- напряжения на выходе преобразователя 13 натяжения подъемных канатов и преобразователя 14 натяжения тяговых канатов, соответствующие их текущему натяжению.
На выходе задатчика 18 частоты вращения привода подъема и задатчика 29 частоты вращения привода тяги машинист устанавливает напряжения, соответствующие заданной частоте вращения указанных приводов  и
и  . Напряжения U18 и U19 поступают на входы блока 17 выделения сигнала управления приводом подъема, а напряжения U29 и U30 - на входы блока 28 выделения сигнала управления приводом тяги. Блоки 17 и 28 являются блоками выделения наибольшего из поступающих на их входы сигналов:
. Напряжения U18 и U19 поступают на входы блока 17 выделения сигнала управления приводом подъема, а напряжения U29 и U30 - на входы блока 28 выделения сигнала управления приводом тяги. Блоки 17 и 28 являются блоками выделения наибольшего из поступающих на их входы сигналов:


Если напряжения U18 и U29 недостаточны для устранения слабины в подъемных и тяговых канатах, то U19>U18, а U30>U29. На вход блока 10 регулирования частоты вращения привода подъема поступает напряжение U17=U19, направленное на устранение слабины в подъемных канатах, и производится устранение слабины в подъемных канатах. Измерение длины подъемных и тяговых канатов обеспечивается преобразователями 15 и 16 длины подъемных и тяговых канатов. Напряжения на выходе преобразователей соответствуют текущим длинам подъемных и тяговых канатов  ,
,  .
.
Если при посадке ковша на поверхность забоя длина тяговых канатов больше или равна заданной длине этих канатов, соответствующей положению ковша на границе ограничения его скорости  , и текущая длина подъемных канатов меньше заданной длины этих канатов, соответствующей положению ковша на границе его торможения
, и текущая длина подъемных канатов меньше заданной длины этих канатов, соответствующей положению ковша на границе его торможения  , то напряжение на выходе преобразователя 16 длины тяговых канатов больше или равно напряжению «зоны нечувствительности» на входе нелинейного элемента 35 и больше напряжения «зоны нечувствительности» на входе нелинейного элемента 36:
, то напряжение на выходе преобразователя 16 длины тяговых канатов больше или равно напряжению «зоны нечувствительности» на входе нелинейного элемента 35 и больше напряжения «зоны нечувствительности» на входе нелинейного элемента 36:

Напряжения на выходах этих элементов: U35≠0 и U36≠0.
Напряжение на выходе преобразователя 15 длины подъемных канатов меньше напряжения «зоны нечувствительности» на входе нелинейного элемента 34:

Напряжение на выходе нелинейного элемента 34: U34=0.
Напряжение U35 поступает на управляющие входы ключей 25 и 27. При U35≠0 ключ 25 замкнут, а ключ 27 разомкнут. Напряжение U36 поступает на управляющие входы ключей 22, 23, 32. При U36≠0 ключи 23 и 32 замкнуты, а ключ 22 разомкнут. Напряжение U34 поступает на управляющий вход ключа 24 и при U34=0 ключ 24 замкнут. Поэтому, если ковш не пересек границу ограничения скорости ковша  , то ключи 23, 24, 25 и 32 замкнуты, а ключи 22 и 27 разомкнуты. Напряжение U28 с выхода блока 28 выделения сигнала управления приводом тяги через замкнутые ключи 25, 24 и 23 поступает на вход блока 11 регулирования частоты вращения привода тяги. Под действием напряжения U28 производится перемещение ковша по забою в процессе копания. При этом ограничение сигнала управления приводом тяги и скорости ковша не производится, т.к. через разомкнутый ключ 27 напряжение U28 отключено от элемента 27 ограничения сигнала управления приводом тяги. Через замкнутый ключ 32 задатчик 33 подключен к блоку 12 регулирования частоты вращения привода поворота и на сигнал управления приводом поворота U33 не накладывается ограничений. Через разомкнутый ключ 22 задатчик 21 дополнительного натяжения подъемных канатов отключен от входа регулятора 19 усилия натяжения подъемных канатов, увеличение усилия натяжения подъемных канатов и отрыв ковша от поверхности забоя произойти не может.
, то ключи 23, 24, 25 и 32 замкнуты, а ключи 22 и 27 разомкнуты. Напряжение U28 с выхода блока 28 выделения сигнала управления приводом тяги через замкнутые ключи 25, 24 и 23 поступает на вход блока 11 регулирования частоты вращения привода тяги. Под действием напряжения U28 производится перемещение ковша по забою в процессе копания. При этом ограничение сигнала управления приводом тяги и скорости ковша не производится, т.к. через разомкнутый ключ 27 напряжение U28 отключено от элемента 27 ограничения сигнала управления приводом тяги. Через замкнутый ключ 32 задатчик 33 подключен к блоку 12 регулирования частоты вращения привода поворота и на сигнал управления приводом поворота U33 не накладывается ограничений. Через разомкнутый ключ 22 задатчик 21 дополнительного натяжения подъемных канатов отключен от входа регулятора 19 усилия натяжения подъемных канатов, увеличение усилия натяжения подъемных канатов и отрыв ковша от поверхности забоя произойти не может.
При перемещении к бровке забоя в процессе копания текущая длина тяговых канатов уменьшается, а подъемных канатов увеличивается. Если текущая длина тяговых канатов становится меньше заданной длины этих канатов, соответствующей положению ковша на границе ограничения скорости ковша  , но больше или равна длине этих канатов, соответствующей положению ковша на границе торможения ковша
, но больше или равна длине этих канатов, соответствующей положению ковша на границе торможения ковша  , и текущая длина подъемных канатов меньше заданной длины этих канатов, соответствующей положению ковша на границе торможения ковша
, и текущая длина подъемных канатов меньше заданной длины этих канатов, соответствующей положению ковша на границе торможения ковша  , то напряжение на выходе преобразователя 16 длины тяговых канатов меньше напряжения «зоны нечувствительности» на входе нелинейного элемента 35, но больше или равно напряжению «зоны нечувствительности» на входе нелинейного элемента 36:
, то напряжение на выходе преобразователя 16 длины тяговых канатов меньше напряжения «зоны нечувствительности» на входе нелинейного элемента 35, но больше или равно напряжению «зоны нечувствительности» на входе нелинейного элемента 36:

Напряжения на выходах этих элементов: U35=0, U36≠0.
Напряжение на выходе преобразователя 15 длины подъемных канатов меньше напряжения «зоны нечувствительности» на входе нелинейного элемента 34:

Напряжение на выходе нелинейного элемента 34: U34=0.
При U35=0 ключ 25 разомкнут, а ключ 27 замкнут, при U36≠0 ключи 23 и 32 замкнуты, а ключ 22 разомкнут, при U34=0 ключ 24 замкнут.
Поэтому, если ковш пересек границу ограничения скорости ковша
, но не пересек границу торможения ковша  , то напряжение U28 поступает на вход блока 11 регулирования частоты вращения привода тяги через ключ 27, элемент 26 ограничения сигнала управления приводом тяги и ключи 24, 23. При этом производится ограничение напряжения U28 и ограничение скорости ковша при приближении его к бровке забоя, что снижает нагрузки, возникающие в рабочем оборудовании и механизмах драглайна при обрушении бровки забоя. Задатчик 33 через ключ 32 подключен на вход блока 12 регулирования частоты вращения привода поворота, а задатчик 21 дополнительного усилия натяжения подъемных канатов через ключ 22 отключен от входа регулятора 19 усилия натяжения подъемных канатов. Блокировка напряжения U33 и отрыв ковша от поверхности забоя не производится.
, то напряжение U28 поступает на вход блока 11 регулирования частоты вращения привода тяги через ключ 27, элемент 26 ограничения сигнала управления приводом тяги и ключи 24, 23. При этом производится ограничение напряжения U28 и ограничение скорости ковша при приближении его к бровке забоя, что снижает нагрузки, возникающие в рабочем оборудовании и механизмах драглайна при обрушении бровки забоя. Задатчик 33 через ключ 32 подключен на вход блока 12 регулирования частоты вращения привода поворота, а задатчик 21 дополнительного усилия натяжения подъемных канатов через ключ 22 отключен от входа регулятора 19 усилия натяжения подъемных канатов. Блокировка напряжения U33 и отрыв ковша от поверхности забоя не производится.
Если ковш приблизился к бровке забоя на расстояние, при котором необходимо произвести торможение и остановку ковша, а также отрыв его от поверхности забоя, чтобы устранить срыв ковша с бровки забоя, и текущая длина тяговых канатов меньше заданной длины этих канатов, соответствующей положению ковша на границе торможения ковша  , а текущая длина подъемных канатов больше заданной длины этих канатов, соответствующей положению ковша на границе торможения ковша
, то:
, а текущая длина подъемных канатов больше заданной длины этих канатов, соответствующей положению ковша на границе торможения ковша
, то:

Напряжения на выходе нелинейных элементов 36 и 34: U36=0, U34≠0.
При U36=0 ключи 23, 32 разомкнуты, а ключ 22 замкнут, при U34≠0 ключ 24 разомкнут. Через разомкнутые ключи 23 и 24 блок 11 регулирования частоты вращения привода тяги отключается от блока 28 выделения сигнала управления приводом тяги, производится торможение и остановка ковша. Через разомкнутый ключ 32 блок 12 регулирования частоты вращения привода поворота отключается от задатчика 33 частоты вращения привода поворота, и срыв ковша с бровки забоя под действием этого привода произойти не может. Через замкнутый ключ 22 задатчик 21 дополнительного натяжения подъемных канатов подключается на третий вход регулятора 19 усилия натяжения подъемных канатов. Усилие натяжения подъемных канатов увеличивается и производится отрыв ковша от поверхности забоя, что полностью устраняет срыв ковша с бровки забоя.
Введение в структуру устройства ключа 24, управляемого через нелинейный элемент 34 выходным напряжением преобразователя 15 длины подъемных канатов, повышает надежность торможения и остановки ковша при приближении его к бровке забоя, т.к. блокировка сигнала управления приводом тяги будет производиться не только через ключ 23, но и через ключ 24, что позволяет контролировать положение ковша в забое на основании длины не только тяговых, но и подъемных канатов.
Для транспортировки ковша машинист устанавливает напряжение на выходе задатчика 18 частоты вращения привода подъема большее, чем напряжение на выходе регулятора 19 натяжения подъемных канатов U18>U19. При этом через блок 17 выделения сигнала управления приводом подъема на вход блока 10 регулирования частоты вращения привода подъема будет подключено напряжение U17=U18, под действием которого может производиться перемещение ковша от бровки забоя к месту его разгрузки.
Таким образом, при положении ковша на поверхности забоя до границы ограничения скорости ковша ограничений и блокировок сигналов управления приводами подъема, тяги и поворота не производится. Остановок ковша и ограничения его скорости без участия машиниста производиться не может, что исключает необоснованные автоматические остановки ковша, снижающие производительность драглайна. Если ковш пересек границу ограничения скорости ковша, но не пересек границу торможения ковша, то производится только ограничение сигнала управления приводом тяги на заданном уровне, что приводит, в свою очередь, к ограничению скорости ковша при приближении его к бровке забоя, обеспечивающему снижение нагрузок, возникающих в рабочем оборудовании и механизмах драглайна, при обрушении бровки забоя, и позволяющему машинисту лучше контролировать приближение ковша к бровке забоя. При пересечении ковшом границы торможения ковша и приближении его к бровке забоя на расстояние, при котором возникает возможность срыва ковша с бровки забоя, производится автоматическое торможение и остановка ковша за счет блокировки сигналов управления приводами тяги и поворота, а также автоматический отрыв ковша от поверхности забоя за счет автоматического увеличения усилия натяжения подъемных канатов, что позволяет полностью устранить аварийный режим «срыв ковша с бровки забоя».
Применение предлагаемого способа для управления движением ковша экскаватора-драглайна и устройства для его осуществления позволяет повысить производительность драглайна, надежность и долговечность его рабочего оборудования и электромеханических систем, а также облегчить управление экскаватором.
Источники информации
1. Патент РФ №2443829 по кл. E02F 9/20. Бюл. №6, 2011 г.
2. Авт. свидетельство №1320352 по кл. E02F 9/20. Бюл. №24, 1987 г. (прототип).
Способ удаления титана из высокохромистых расплавов
Способ обработки канала алмазной вставки сопла
Способ варки стекломассы и стекловаренная печь с барботированием слоя стекломассы
Устройство для обработки металлического расплава рафинирующим шлаком
Способ обработки железорудных окатышей
Способ переработки низкосортных молибденитовых концентратов
Комбинированный алмазный инструмент для получения отверстий с задней подрезкой и выточкой
Способ извлечения металлов из силикатных никелевых руд
Высокопрочный сплав на основе алюминия с добавкой кальция
Способ вакуумного ионно-плазменного нанесения многослойного износостойкого покрытия для режущего инструмента
Способ удаления титана из высокохромистых расплавов
Способ обработки канала алмазной вставки сопла
Способ варки стекломассы и стекловаренная печь с барботированием слоя стекломассы
Устройство для обработки металлического расплава рафинирующим шлаком
Способ обработки железорудных окатышей
Способ переработки низкосортных молибденитовых концентратов
Комбинированный алмазный инструмент для получения отверстий с задней подрезкой и выточкой
Способ извлечения металлов из силикатных никелевых руд
Высокопрочный сплав на основе алюминия с добавкой кальция
Способ вакуумного ионно-плазменного нанесения многослойного износостойкого покрытия для режущего инструмента

