Результат интеллектуальной деятельности: ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ И УЗЕЛ, СОДЕРЖАЩИЙ ВРАЩАЮЩУЮСЯ СИСТЕМУ И ТАКОЙ ДАТЧИК
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к датчику, предназначенному для установки в системе, содержащей вал, установленный с возможностью вращения относительно корпуса, причем необходимо обеспечить возможность непрерывного измерения углового положения вала.
Изобретение также относится к узлу, содержащему указанную систему и датчик по изобретению.
Уровень техники
Для многих известных электрических двигателей желательно обеспечить возможность векторного управления. Однако для обеспечения возможности векторного управления двигателем необходимо обеспечить возможность измерения положения оси ротора двигателя относительно статора.
В известных решениях для измерения положения оси ротора двигателя относительно статора используют элементы Холла, определяющие величину магнитной индукции В, создаваемой магнитами ротора.
Для осуществления простых последовательностей управления двигателем, например, трапецеидальной формы, достаточно трех элементов Холла с дискретным выходным сигналом: действительно, они обеспечивают возможность обнаружения северных и южных полюсов магнитов. Такие элементы Холла с дискретным выходным сигналом не требуют использования какого-либо особого магнитного контура.
Однако данная технология не обеспечивает возможности ни управления скоростью двигателя, ни векторного управления.
Раскрытие изобретения
Задача, на решение которой направлено настоящее изобретение, состоит в устранении, по меньшей мере, одного из указанных недостатков.
Для решения поставленной задачи в соответствии с изобретением предлагается датчик по п.1 формулы изобретения.
Дополнительные преимущества изобретения обеспечены признаками по пп.2-5, применяемыми по отдельности или в любых технически возможных сочетаниях.
В соответствии с изобретением также предлагается узел по п.6, содержащий, в частности, вышеуказанную систему и датчик по изобретению.
Дополнительные преимущества изобретения обеспечены признаками по пп.7-9, применяемыми по отдельности или в любых технически возможных сочетаниях.
Решение по изобретению обладает многочисленными преимуществами.
Изобретение позволяет измерять положение оси вала, вращающегося относительно корпуса, при помощи линейных электрических преобразователей, например, элементов Холла.
Поскольку магнитный контур формирует синусоидальную магнитную индукцию, результаты измерений датчика обладают достаточно высокой точностью для обеспечения возможности векторного управления двигателем.
Для управления многополюсным двигателем может быть предусмотрена установка датчика, число полюсов которого равно числу полюсов двигателя.
Измерения достоверны и совместимы с длительностью срока службы электрического двигателя (порядка 150000 часов).
В оптимальном варианте датчик имеет форму диска, устанавливаемого в продолжение статора и имеющего небольшие пространственные размеры.
Краткое описание чертежей
Другие характеристики, задачи и преимущества изобретения станут ясны из нижеследующего описания, приведенного исключительно в качестве примера, не накладывающего каких-либо ограничений, со ссылками на прилагаемые чертежи.
На чертежах:
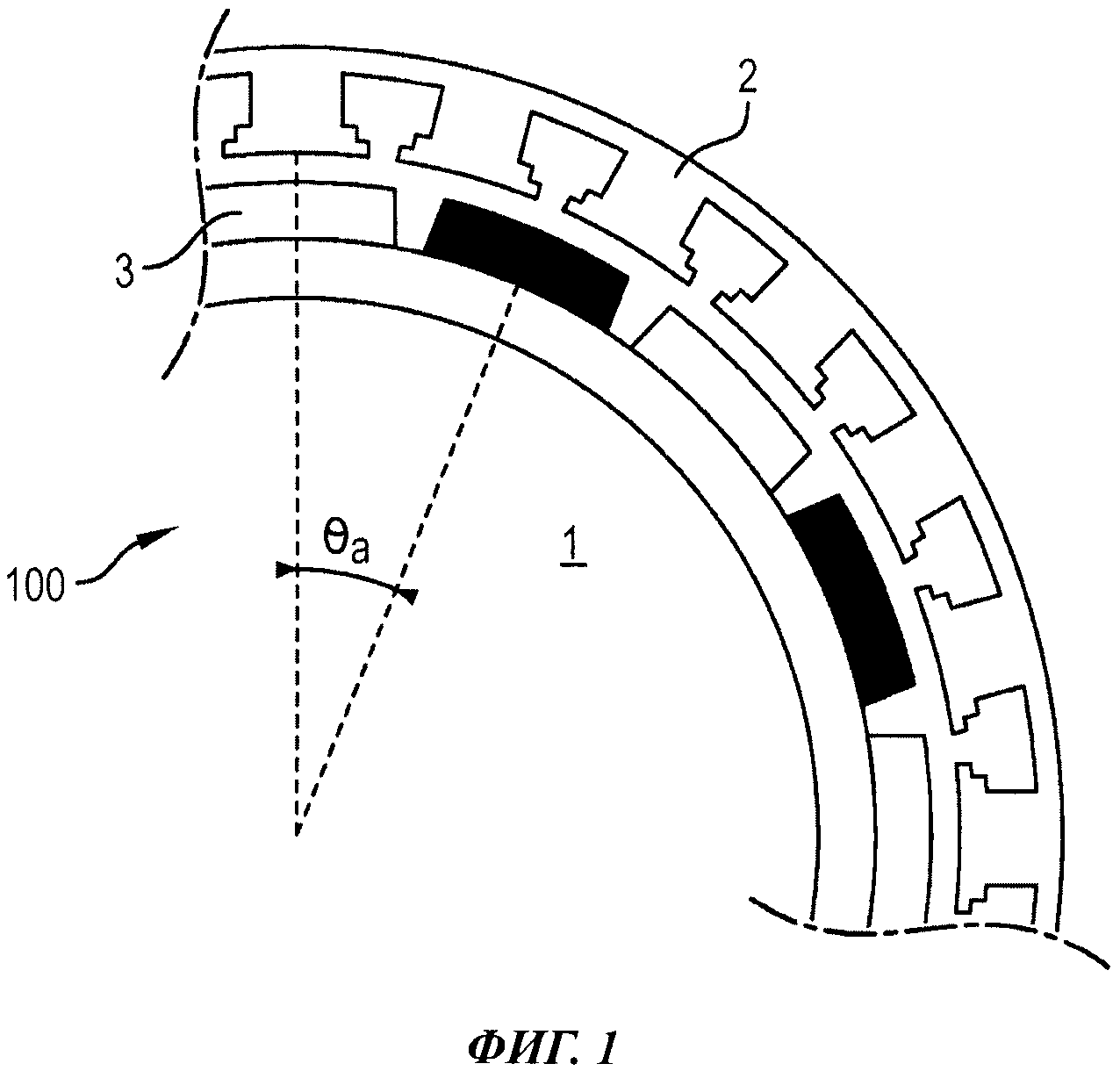
на фиг.1 схематически представлен один из возможных вариантов осуществления известной системы, содержащей вал, установленный с возможностью вращения относительно корпуса, непрерывное измерение углового положения которого необходимо обеспечить;
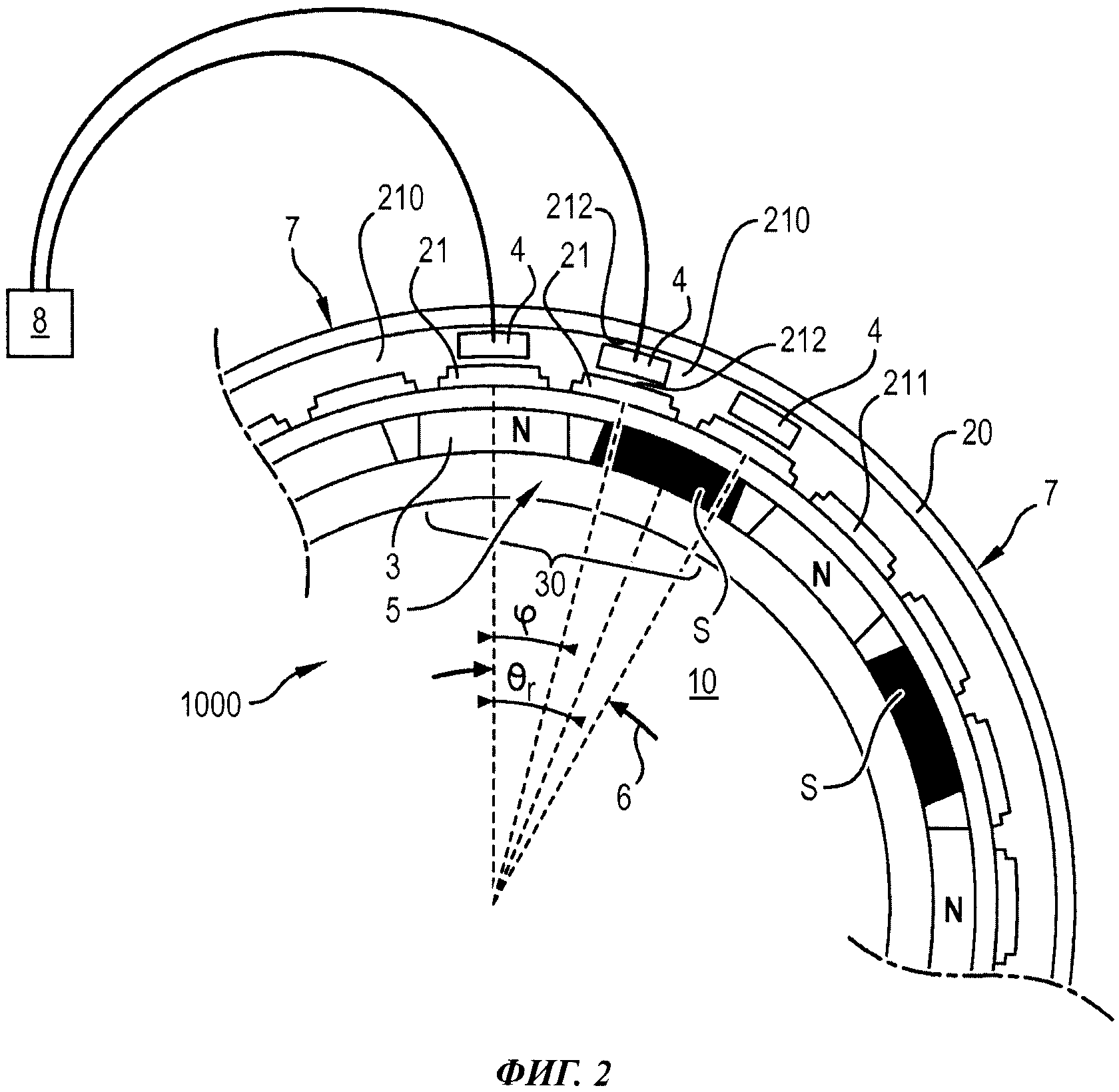
на фиг.2 схематически представлен в радиальном разрезе один из возможных вариантов осуществления датчика по изобретению; и
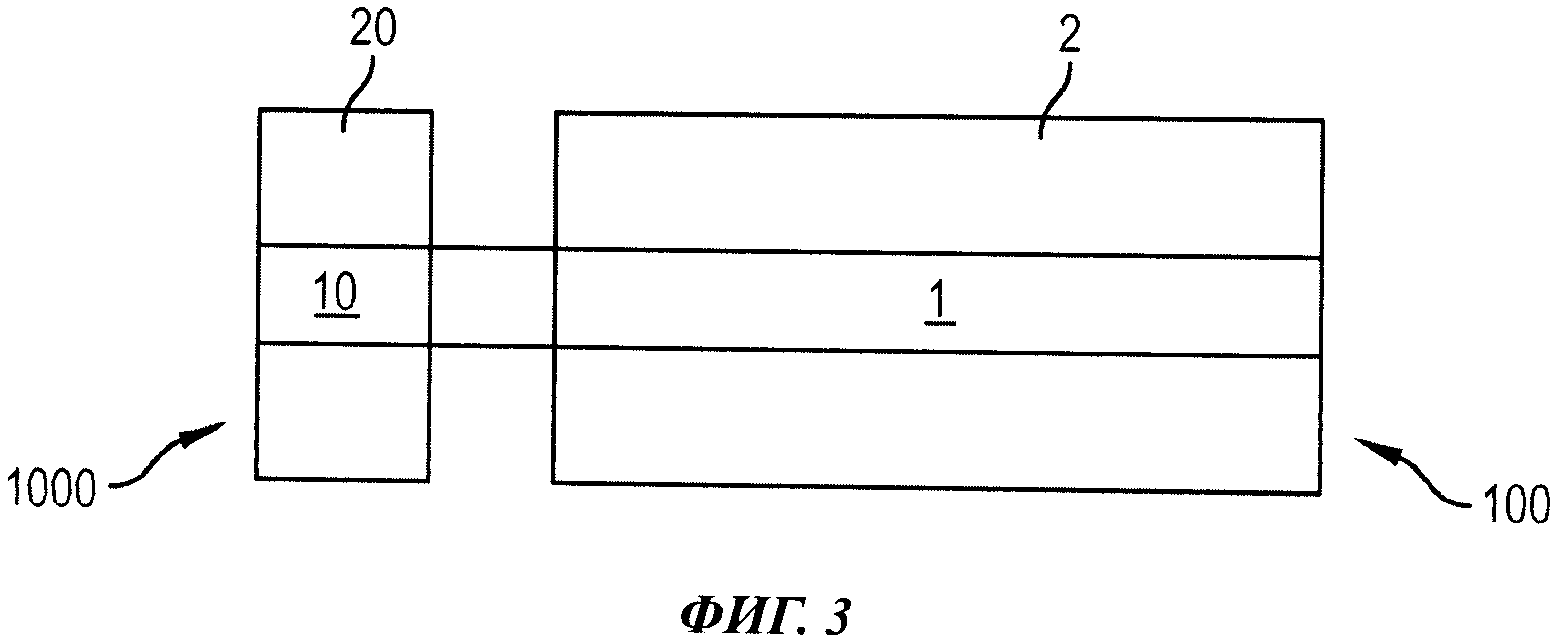
на фиг.3 схематически представлен в продольном разрезе один из возможных вариантов осуществления узла, содержащего систему и датчик по изобретению.
Одинаковые элементы обозначены на всех чертежах одними и теми же ссылочными позициями.
Осуществление изобретения
На фиг.2 схематически представлен один из возможных вариантов осуществления датчика 1000, предназначенного для установки в системе 100, известной и представленной на фиг.1.
Как показано на фиг.1, система 100 содержит вал 1, установленный с возможностью вращения относительно корпуса 2, причем необходимо обеспечить возможность непрерывного измерения углового положения θа вала.
Датчик 1000 содержит в основном статор 20 и ротор 10, соединенный с валом 1.
Как показано на фиг.3, соединение между ротором 10 и валом 1 такое, что угловое положение θr ротора 10 относительно статора 20 совпадает с угловым положением θа вала 1 относительно корпуса 2.
В оптимальном варианте вал 1 и ротор 10 выполнены в виде единой детали, однако ротор 10 также может быть надет на вал 1 с использованием любых крепежных средств, как, например, при помощи механического зацепления элементов, сваркой или склеиванием.
В конфигурации, представленной на фиг.3, вращающийся вал 1 расположен центрально относительно системы 100. Однако подразумевается, что также возможны и любые другие конфигурации; например, положение вращающегося вала относительно системы может быть периферическим. Во любом случае, положение ротора, соединенного с валом, может быть центральным или периферическим относительно датчика.
Датчик 1000 дополнительно содержит, по меньшей мере, одну пару 30 постоянных магнитов 3 с северной полярностью, по традиции обозначенных на чертежах символом N, и с южной полярностью, по традиции обозначенных на чертежах символом S, причем магниты в каждой паре 30 расположены с чередованием полярности.
В конфигурации, представленной на фиг.2, пары 30 магнитов 3 расположены на роторе 10, однако подразумевается, что пары 30 магнитов 3 также могут быть расположены на статоре 20.
В любом случае, при вращении ротора 10 каждая из пар 30 создает магнитную индукцию В в датчике 1000.
В соответствии с известными технологиями датчик 1000 дополнительно содержит магнитный контур 21 для канализирования магнитной индукции В, создаваемой каждой из пар 30 магнитов 3.
Как показано на фиг.2, контур 21 содержит по меньшей мере два зазора 210, функция которых раскрыта более подробно в дальнейшем описании.
Конструкция контура 21 выполнена с возможностью обеспечения пропорциональности величины магнитной индукции В синусоидальной функции углового положения θr ротора 10.
Таким образом, используемая конструкция контура 21 позволяет получить соотношение:

где k - постоянная контура 21.
Датчик 1000 дополнительно содержит по меньшей мере два электрических преобразователя 4 с линейной выходной характеристикой, имеющие угловое смещение между собой, равное углу φ, относительно статора 20, при этом каждый из них помещен в зазор 210, как показано на фиг.2.
Преобразователи 4 предпочтительно представляют собой элементы Холла, но также могут быть магниторезистивными датчиками или феррозондами.
В любом случае, каждый из преобразователей 4 выдает на выход сигнал U, который является функцией величины магнитной индукции В. По причине линейности данных преобразователей, используя уравнение (EQ1), получаем:

где К - линейная постоянная преобразователя 4.
Сигналы на выходе преобразователей поступают в обрабатывающие средства 8, которые в соответствии с известными технологиями содержат все необходимые средства вычислений и хранения информации.
Наличие по меньшей мере двух разнесенных преобразователей 4 позволяет определить угловое положение θr ротора 10 относительно статора 20: разность фаз между двумя синусоидальными сигналами, поступающими с выходов преобразователей 4, соответствует угловому смещению φ.
Элементы Холла предпочтительно имеют небольшие пространственные размеры. Как показано на фиг.3, в оптимальном варианте датчик имеет форму диска, установленного в продолжение статора и имеющего небольшую толщину.
В оптимальном варианте датчик 1000 содержит три преобразователя 4, которые образуют трехфазную структуру и выдают на выходе трехфазную сетку сигналов. Такая трехфазная структура обладает высокой устойчивостью, поскольку с учетом того, что для определения углового положения θr достаточно двух преобразователей 4, третий преобразователь 4 позволяет повысить точность и обнаруживать возможные неисправности.
Для обеспечения выполнения в контуре 21 соотношения (EQ1) магнитный контур 21 в оптимальном варианте представляет собой зубцовый контур, в соответствии с терминологией в данной области. Типы магнитных контуров 21, обеспечивающие выполнение соотношения (EQ1), известны специалистам в данной области.
Для этой цели контур 21 содержит по меньшей мере один измерительный модуль 5, содержащий три зубца 211 на пару 30 магнитов 3, причем каждый из зубцов 211 модуля содержит зазор 210, принимающий преобразователь 4. Также возможны конфигурации, кратные данной.
Измерительный модуль также может иметь другие конфигурации. Например, каждый из измерительных модулей может содержать:
- девять зубцов на четыре пары магнитов; или
- девять зубцов на пять пар магнитов; или
- двенадцать зубцов на пять пар магнитов.
Как и в вышеописанном случае, могут быть использованы любые конфигурации, кратные указанным.
Преобразователи 4 могут быть расположены по всей окружности датчика 1000, т.е. образовывать измерительный модуль 5, охватывающий угол в 360°.
Однако измерительный модуль 5 также может быть предусмотрен только в угловом секторе 6 датчика 1000. Таким образом, может быть получена экономия на преобразователях 4.
Однако в таком случае магнитный контур 21 в оптимальном варианте содержит зубцовую структуру 7, содержащую зазоры 210, которые не принимают преобразователи 4, и которые расположены по обе стороны от сектора 6, определяющего измерительный модуль 5, с целью сохранения по обе стороны от преобразователей 4, по существу, одинаковой геометрии и получения на выходе всех преобразователей 4 идентичных сигналов.
В оптимальном варианте каждый из зазоров 210 измерительного модуля 5 содержит несколько преобразователей 4 с целью обеспечения избыточности информации.
Поверхности 212 каждого из зазоров 210 предпочтительно параллельны друг другу. В таком случае магнитная индукция В является квазиоднородной, что позволяет устранить ошибки, связанные с положением преобразователя 4 в зазоре 210.
Датчик 1000 по изобретению может быть использован в любом узле, содержащем систему 100, содержащую вал 1, установленный с возможностью вращения относительно корпуса 2, но в оптимальном варианте может быть применен в синхронном электрическом двигателе с магнитами. Изобретение обеспечивает возможность непрерывного измерения углового положения θa двигателя (благодаря соединению между ротором 10 и валом 1), обеспечивая, таким образом, возможность векторного управления двигателем.
В случае, когда двигатель представляет собой многополюсный двигатель, количество пар 30 чередующихся постоянных магнитов 3 с полярностями N и S, которые содержит датчик 1000, равно числу полюсов двигателя 100.
Поскольку все преобразователи испытывают влияние одних и тех же магнитов, суммарные изменения уровня индукции В не вызывают возмущений в оценке положения, будь то в двухфазном режиме, в трехфазном режиме или в режиме с большим числом фаз.
Способ анализа полетных данных
Способ анализа собранных воздушным судном полетных данных с целью их подразделения по фазам полета
Электрический двигатель с низким моментом короткого замыкания, приводное устройство с несколькими двигателями и способ изготовления такого двигателя
Способ выбора узлов многоточечной ретрансляции
Способ анализа полетных данных
Способ анализа собранных воздушным судном полетных данных с целью их подразделения по фазам полета
Электрический двигатель с низким моментом короткого замыкания, приводное устройство с несколькими двигателями и способ изготовления такого двигателя
Способ выбора узлов многоточечной ретрансляции
Ротор электродвигателя с наружной оболочкой, образованной путем намотки, способ изготовления такого ротора и электродвигатель с таким ротором

