Результат интеллектуальной деятельности: РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Вид РИД
Изобретение
Изобретение относится к области радиолокации и предназначено для использования на вертолетах и самолетах.
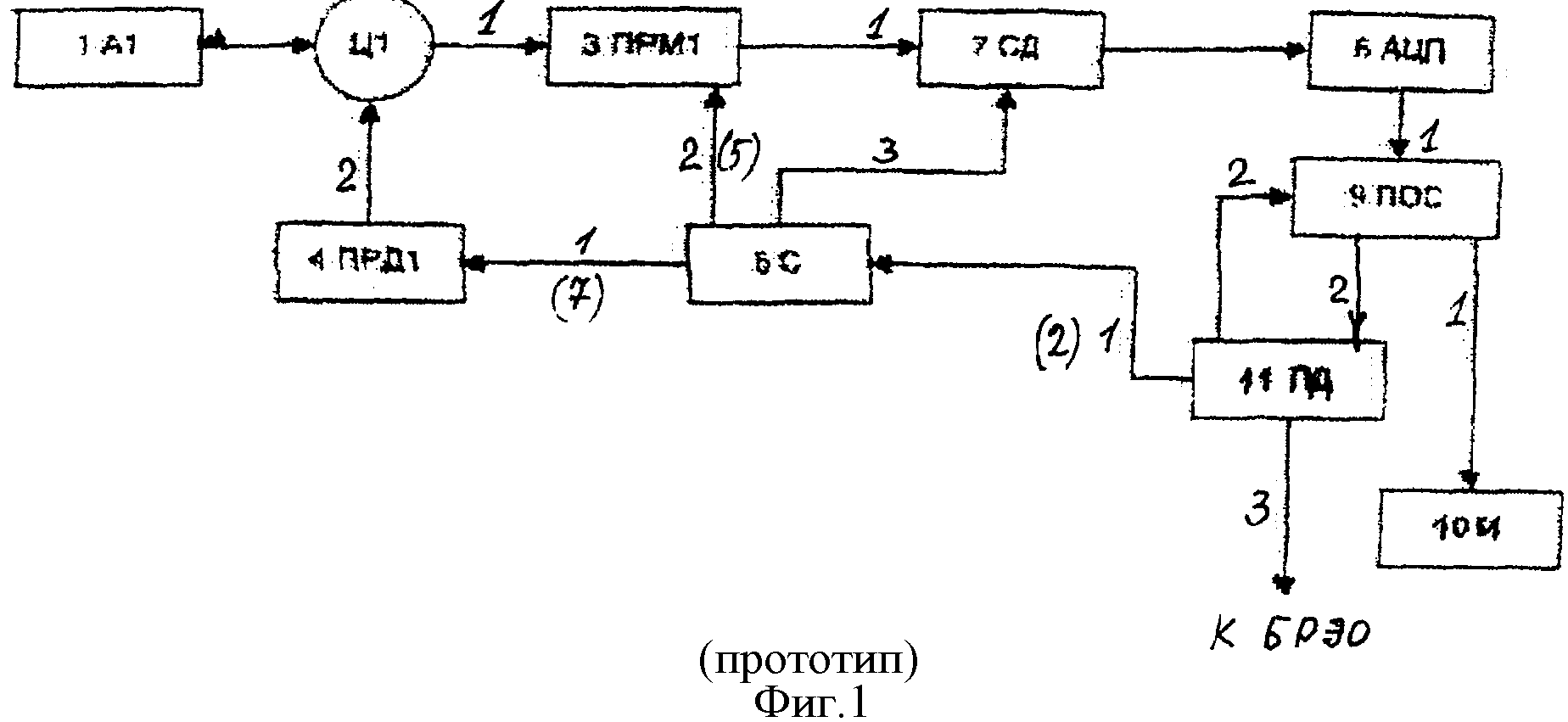
Известны вертолетные радиолокационные станции для ударных вертолетов, предназначенные для обнаружения и сопровождения неподвижных целей с определением их координат (дальности, угла азимута и угла места) и передачей этих координат в систему управления оружием. Для выполнения требований по точности определения угловых координат применяются антенны с узкой диаграммой направленности, а учитывая ограниченность габаритных размеров выделяемых на вертолете для ее размещения, применяют миллиметровый диапазон излучаемых волн. Такая РЛС разработана в США и установлена на вертолете AH-64D Longbow Apache (рекламный проспект Longbow System Description фирма Lockheed Martin 1995) указан в пат. 2191401 RU. Блок-схема РЛС показана на фиг.1 и принята за прототип.Эта РЛС миллиметрового диапазона волн содержит антенну 1А1, соединенную с циркулятором Ц1, выход которого связан с первым входом приемника 3ПРМ1, а вход - с выходом передатчика 4ПРД1, вход которого подключен к первому выходу синхронизатора 5С, второй выход синхронизатора 5С соединен со вторым входом приемника 3ПРМ1, выход приемника соединен через последовательно соединенные синхронный детектор 7СД и аналого-цифровой преобразователь 6АЦП с процессором обработки сигналов 9ПОС, первый и второй выходы которого соединены соответственно с индикатором 1ОИ и со входом процессора данных 11ПД, выходы которого соединяются с процессором обработки сигналов и входом синхронизатора и с комплексом бортового радиоэлектронного оборудования (БРЭО) вертолета, при этом третий выход синхронизатора соединен со вторым входом синхронного детектора 7СД. Антенна такой РЛС вращается по азимуту, производя круговой или секторный обзор заданного сектора, при этом за один обзор производится обнаружение целей и определение их координат.
Синхронизатор 5С обеспечивает согласованную работу составных частей РЛС, см. фиг.1. Он содержит задающий генератор и схемы формирования высокостабильных колебаний миллиметрового диапазона волн для запуска передатчика импульсных когерентных сигналов для 4ПРД1, а также опорных сигналов для приемника 3ПРМ1 и синхронного детектора 7СД. С выхода передатчика 4ПРД1 высокочастотные колебания через циркулятор Ц1 подаются в антенну 1А1 и излучаются через нее. Момент излучения зондирующего импульса при каждом положении антенны определяет начало шкалы отсчета дальности. Отраженные от поверхности сигналы принимаются антенной и через циркулятор Ц1 подаются на вход приемника 3ПРМ1, усиливаются и передаются в синхронный детектор 7СД, а оттуда после детектирования поступают в аналогово-цифровой преобразователь (АЦП), с выхода которого они в цифровом виде поступают на процессор обработки сигналов 9ПОС, где производится их цифровая обработка и подготовка к виду, удобному для отображения на индикаторе 10И. С другого выхода процессора обработки сигналов после выбора оператором наземной цели цифровые данные о параметрах цели передаются в процессор данных 11ПД и затем в бортовой электронный комплекс для применения в системе управления оружием. Процессор данных 11ПД управляет работой синхронизатора и процессора обработки сигналов в различных режимах работы РЛС, а также обеспечивает информационные связи РЛС с комплексом (К) бортового электронного оборудования.
Основным недостатком такой РЛС является ограниченная дальность обнаружения наземных малоразмерных неподвижных целей (типа танк) на фоне подстилающей поверхности, которая определяется отношением эффективной отражающей поверхности цели σцели к эффективной отражающей подстилающей поверхности σфона. При низком уровне мощности собственных шумов приемника по сравнению с фоновой составляющей сигнала отражений отношение сигнал/шум+фон "q" будет определяться
q=1+σц/σф,
где σц - эффективная площадь отражений от цели;
σф - эффективная площадь отражений подстилающей поверхности.
Учитывая, что эффективная площадь отражений подстилающей поверхности определяется
σф=dL·dr·σ0,
где dL - линейный размер элемента разрешения по азимуту;
dr - размер элемента по дальности;
σ0 - удельное ЭПР подстилающей поверхности.
Поэтому и характеристики обнаружения целей на фоне подстилающей поверхности при принятом разрешении по дальности "dr" будут зависеть от разрешения по азимуту.
Так приведенная выше РЛС с шириной луча антенны по азимуту θЛ=0,4 гр. обеспечивает обнаружение цели (с σу=10 м на фоне степь - летом с вероятностью Р=0,8) на дальности не более 6 км. Дальнейшее обужение диаграммы направленности антенны в азимутальной плоскости для повышения дальности обнаружения связаны с непреодолимыми трудностями:
- ограничением габаритов для размещения антенны;
- дополнительными потерями энергии в атмосфере при уменьшении длины волны.
Однако наземные средства ПВО противника обеспечивают обнаружение вертолетов и применяют средства поражения на дальности более 8 км. В связи с этим появляется необходимость обнаружения цели вертолетной РЛС на дальности, превышающей дальность зоны действия ПВО.
Как следует из вышесказанного, повысить дальность обнаружения на фоне подстилающей поверхности при приведенных ограничениях можно только за счет обужения луча, применяя режим синтезирования апертуры антенны.
Однако применение режима синтезированной апертуры для обзора поверхности, в широком азимутальном секторе, при работе узким лучом реальной антенны (который необходим для точности определения угловых координат) приводит к большим затратам времени, что является неприемлемым для боевых условий.
Так в приведенной РЛС, если производить обнаружение в азимутальном секторе 30° при работе реальным лучом антенны θЛ=0,4 гр. потребуется 75 положений. На каждом положении луча в режиме синтезированной апертуры для получения обужения этого луча в 10 раз необходимо затратить время Тс=0,15 сек (с учетом трехкратного некогерентного накопления).
Таким образом, полное время, затрачиваемое только на обнаружение в заданном секторе, будет более 11 сек, как видим, применяя режим синтезирования для устранения одного недостатка (малая дальность обнаружения цели РЛС) приходим к другому недостатку (большое время обнаружения цели). При этом время выполнения прицельных операций при работе по наземным целям не обеспечивается (допустимое Тпр<8 сек). Задача предлагаемого изобретения заключается в повышении дальности обнаружения малоразмерной неподвижной наземной цели на фоне подстилающей поверхности вертолетной РЛС и выполнения заданных требований на время обнаружения и выдачу точных координат цели.
Сущностью изобретения является выбор и построение комплекса средств для реализации труднорешаемой задачи обнаружения наземной неподвижной малоразмерной цели (типа танк) на фоне отражений от земной поверхности при работе БРЛС на летательных аппаратах. Задача усложняется, когда обнаружение цели должно обеспечиваться в широкой зоне (±60°) по азимуту на дальности Д>10 км с последующим определением угловых координат с ошибкой σ≤10 угл. минут. При этом при работе в боевых условиях вся процедура по обнаружению и определению точных координат должна обеспечиваться за время меньшее, чем время подготовки и пуска средств поражения ПВО противника. В настоящей заявке приведена совокупность средств, оптимально решающих задачу.
Опыт разработок показывает, что получение высокой точности определения угловых координат и обнаружение целей в широкой зоне обзора за требуемое минимальное время при использовании только одного диапазона волн излучения невозможно.
Для создания широкой зоны обзора при минимальном времени поиска и повышения контрастности малоразмерной неподвижной цели на фоне земной поверхности применяется приемо-передающий канал, работающий с применением радиоволн в «L» диапазоне. Применение волны «L» диапазона для обнаружения наземной неподвижной цели на фоне земной поверхности имеет целый ряд преимуществ по сравнению с другими диапазонами радиоволн. Основным преимуществом этой радиоволны является малый уровень отражения от поверхности и практическая независимость работы в сложных климатических условиях (дождь 12,5 мм/час), а также минимальное затухание при прохождении через листву. Для определения угловых координат с высокой точностью применяется канал «мм» диапазона радиоволн, формирующий узкую диаграмму направленности.
Поставленная задача решается применением единого зеркала антенны для обоих диапазонов радиоволн, при этом в зеркале совмещены оптические оси двух диаграмм. Такое решение позволяет быстро перейти от предварительного целеуказания в «L» диапазоне к точному определению угловых координат i «мм»-диапазоне радиодиоволн в соответствии с заданным минимальным временем и степенью точности обнаружения цели.
Повышение дальности обнаружения неподвижных наземных целей на фоне подстилающей поверхности как при работе в дециметровом, так и миллиметровом диапазонах волн производится за счет обужения диаграммы направленности луча в азимутальной плоскости в режиме синтезирования апертуры антенны. При этом для обнаружения и определения координат наземной неподвижной цели выполняется следующий порядок работы такой радиолокационной системы. Вначале обнаружение наземной цели в заданном широком секторе производится с помощью РЛС, работающей в дециметровом диапазоне в режиме синтезирования апертуры волн антенны.
После обнаружения цели в этом диапазоне и определения ее координат оператором по экрану индикатора с помощью кнюппеля включается режим РЛС в миллиметровом диапазоне. При этом луч антенны миллиметрового диапазона "θЛ станавливается в азимутальное направление с координатами определенными РЛС в дециметровом диапазоне волн. И если ошибка азимутальной координаты цели, определенная РЛС в дециметровом диапазоне волн не будет превосходить σаз=ΘЛ/3.3, это обеспечит (с вероятностью Р=0,9) накрытие лучом наземной цели и ее обнаружение каналом в миллиметровом диапазоне волн.
При последовательной работе двухдиапазонная РЛС обеспечивает:
- увеличение дальности обнаружения наземных (надводных) целей на фоне подстилающей поверхности в широком азимутальном секторе при заданном минимальном времени обнаружения.
- определение координат с высокой точностью наземных (надводных) целей за минимальное время при их автоматическом сопровождении.
Для решения этих задач в состав предлагаемой РЛС, состоящей из радиолокационного канала миллиметрового диапазона волн, содержащего антенну, передатчик, циркулятор, приемник, процессор сигналов, процессор данных, задающий генератор, синтезатор частот - синхронизатор, датчик углов по осям азимута и угла места, и индикатор, вводится радиолокационный канал дециметрового диапазона волн, содержащий излучатель антенны "L"-диапазона (конструктивно совмещенный с зеркалом антенны миллиметрового диапазона волн), циркулятор «L», передатчик «L», приемник «L», коммутатор и инерциально-навигационную систему.
Комплекс устройств представлен на блок-схемах предлагаемой РЛС и устройств.
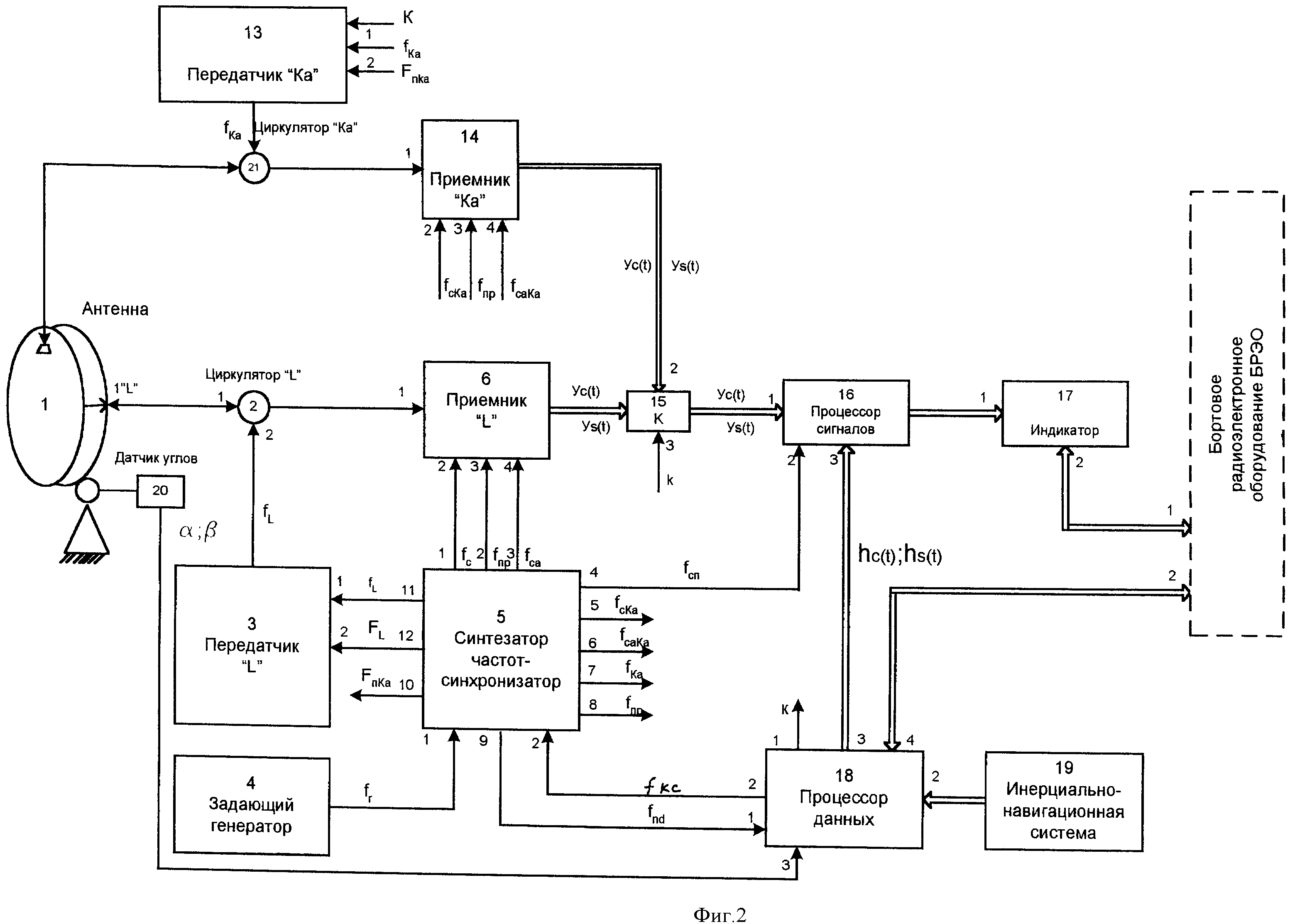
На фиг.2 представлена блок-схема предлагаемой РЛС
Пояснение к условным обозначениям на фигурах 1 и 2:
Первый выход (1) с процессора данных на вход синтезатора (на фиг.1) соответствует
Второму (2) выходу с процессора данных на второй вход(2) синтезатора (на фиг.2)
Второй выход с синтезатора (2) на вход приемника (3) (на фиг.1) соответствует
Пятому выходу синтезатора (5) на второй вход(2) приемника (на фиг.2)
Первый выход (1) с синтезатора на вход передатчика (на фиг.1) соответствует
Седьмому выходу (7) с синтезатора на вход передатчика (на фиг.2)
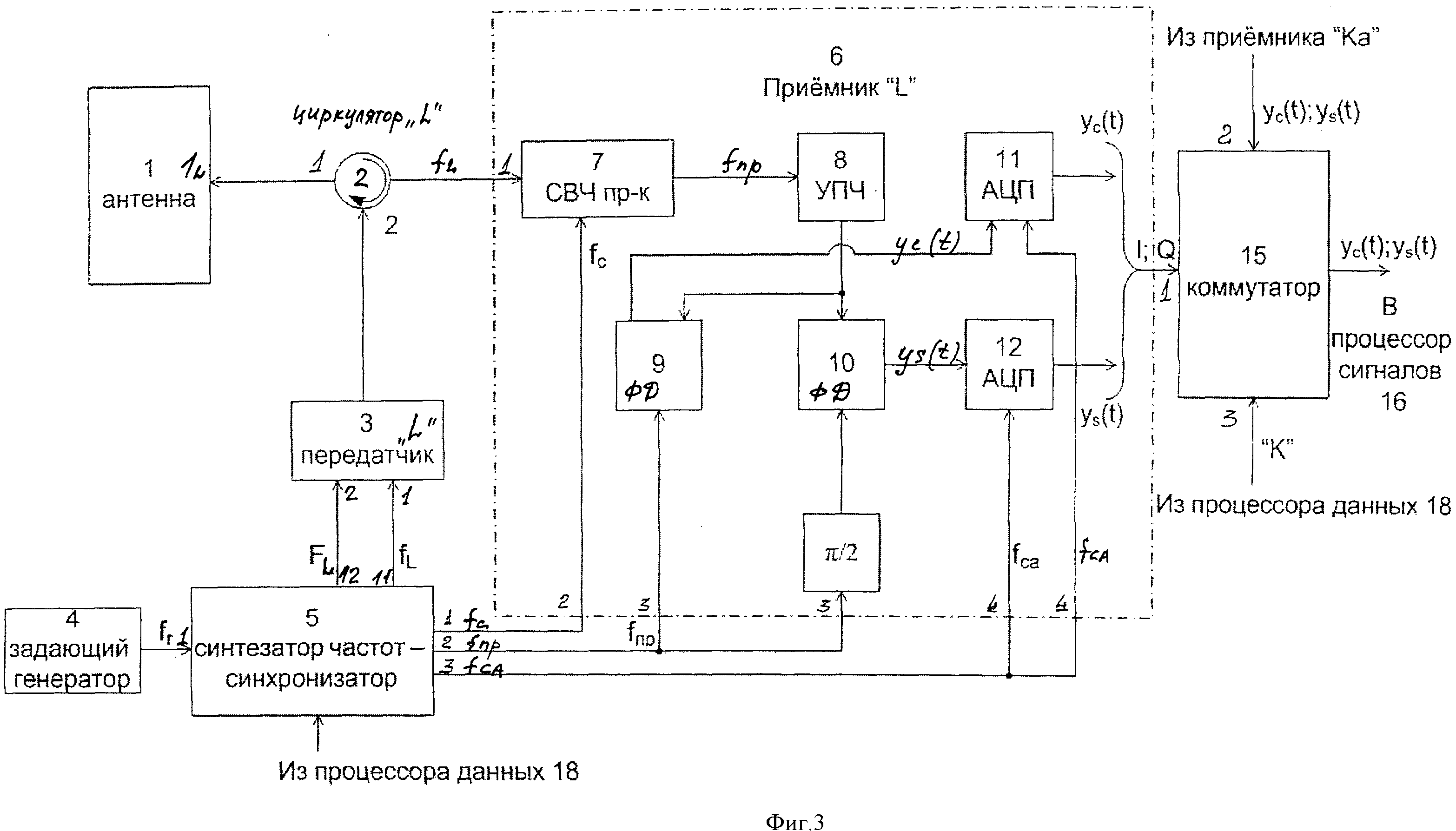
На фиг.3 - блок-схема приемного канала дециметрового диапазона
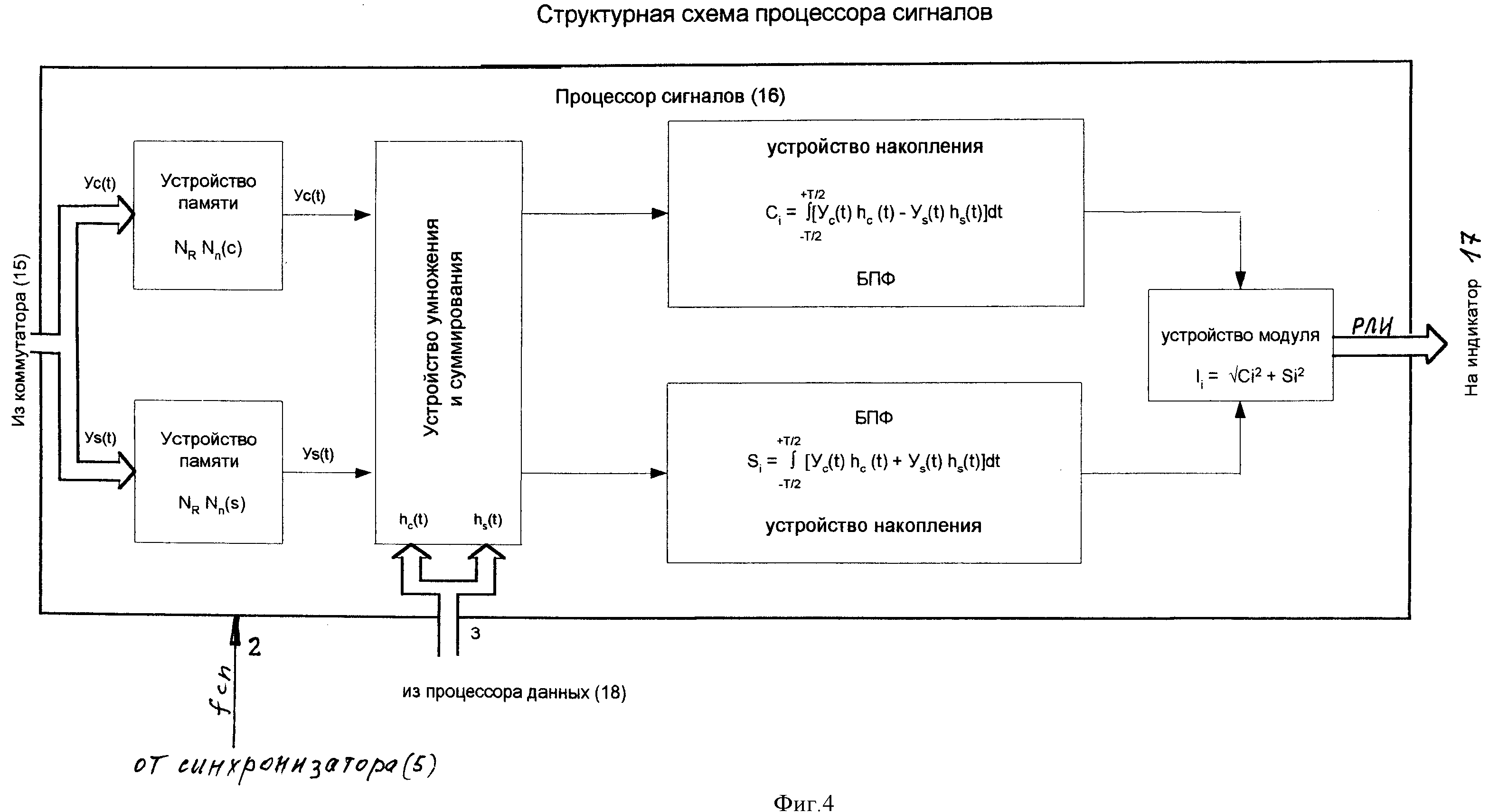
На фиг.4 - структурная схема процессора сигналов
На фиг.5 - структурная схема процессора данных
Работа устройств приведена в описании.
На фиг.2 представлена блок-схема предлагаемой РЛС, где
1 - антенна
1 «L» - излучатель антенны «L» диапазона
2 - циркулятор «L»
3 - передатчик «L»
4 - задающий генератор
5 - синтезатор частот - синхронизатор
6 - приемник «L»
13 - передатчик Ka
14 - приемник Ka
15 - коммутатор
16 - процессор сигналов
17 - индикатор
18 - процессор данных
19 - инерциально-навигационная система
20 - датчик углов
21 - циркулятор Ka
На фиг.3 представлена блок-схема работы приемного канала дециметрового диапазона волн, где
1 - антенна
1«L» - излучатель «L» диапазона
2 - циркулятор «L»
3 - передатчик «L»
4 - задающий генератор
5 - синтезатор частот-синхронизатор
6 - приемник «L»
7 - СВЧ-приемник
8 - УПЧ (усилитель промежуточной частоты)
9 - фазовый детектор
10 - фазовый детектор
11 - АЦП (аналого-цифровой преобразователь)
12 - АЦП (аналого-цифровой преобразователь)
15 - коммутатор
Из схемы на фиг.2 следует, что зеркало антенны (1) является общим для двух радиолокационных каналов «L»- и «Ka»-диапазонов, при этом выход передатчика «L» (3) через циркулятор «L» (2) для излучения энергии соединен со входом излучателя антенны (1 «L»), выход излучателя антенны (1«L») через циркулятор «L» (2) соединен с первым входом приемника «L» (6) и обеспечивает прием сигнала «fL». Выход приемника «L» (6) соединен с первым входом коммутатора (15). Выход коммутатора (15) соединен с первым входом процессора сигналов (16), выход процессора сигналов (16) соединен с первым входом индикатора (17). Для приема сигналов в «Ka»-диапазоне выход антенны «Ka»-диапазона (1) через циркулятор «Ka» (21) соединен с первым входом приемника «Ka» (14), выход которого соединен со вторым входом коммутатора (15). Выход передатчика «Ka» (13) для излучения сигналов через циркулятор «Ka» (21) соединен с антенной (1).
Выход задающего генератора (4) соединен с первым входом синтезатора частот - синхронизатора (5). Выход датчика углов (20) соединен с третьим входом процессора данных (18). Первый вход процессора данных (18) соединен с девятым выходом синтезатора частот - синхронизатора (5). Второй выход процессора данных (18) соединен со вторым входом синтезатора частот - синхронизатора (5), и обеспечивает подачу командного сигнала fкс. Первый выход процессора данных (18) соединен с третьим входом коммутатора (15), третий выход-вход процессора данных (18) соединен с третьим входом-выходом процессора сигналов (16). Второй вход процессора данных (18) соединен с выходом инерциальной системы (19). Четвертый вход-выход процессора данных (18) соединен со вторым входом-выходом БРЭО (бортовое радиолокационное оборудование). Первый вход-выход БРЭО соединен со вторым входом-выходом индикатора (17).
В таблице 1 представлено назначение выходных сигналов синтезатора частот синхронизатора и их соединение с блоками РЛС. При этом первый выход соединен со вторым входом приемника «L» (6), второй выход соединен с третьим входом приемника «L» (6), третий выход соединен с четвертым входом приемника «L» (6), четвертый выход соединен со вторым входом процессора сигналов (16), пятый выход соединен со вторым входом приемника «Ka» (14), шестой выход соединен с четвертым входом приемника «Ка» (14), седьмой выход соединен с первым входом передатчика «Ka» (13), восьмой выход соединен с третьим входом приемника «Ka» (14), девятый выход соединен с первым входом процессора данных (18), десятый выход соединен со вторым входом передатчика «Ka» (13), одиннадцатый выход соединен с первым входом передатчика «L» (3), двенадцатый выход соединен со вторым входом передатчика (3).
Применяемый процессор (обработчик) сигналов 16 (см фиг.4) представляет собой быстродействующую ЦВМ и в зависимости от режимов работы РЛС осуществляет сжатие сигналов по дальности, доплеровскую фильтрацию, пороговую обработку, измеряет первичные параметры сигналов и т.п.
Процессор данных 18 (см. фиг.5) представляет собой универсальную ЦВМ, в которой вырабатываются сигналы управления блоками и режимами, измеряются параметры дальности, угловых координат, скорости и др. Процессор сигналов и процессор данных в разной модификации освоены и выпускаются промышленностью.
|
На фиг.3 приведена схема радиолокационного канала "L" диапазона с раскрытой схемой приемного канала (6) и связь его с коммутатором (15). Приведенная структура приемника общеизвестна.
Для обнаружения и определения координат по наземным целям предлагаемая РЛС работает двумя последовательными этапами. На первом этапе для обнаружения наземной неподвижной цели в большом азимутальном секторе обзора включается радиолокационный канал дециметрового "L" диапазона волн. Обужение диаграммы для обнаружения цели проводится в режиме синтезированной апертуры антенны. Движение носителя, его траектория, углы визирования выбираются для получения заданного обужения угла, обеспечивающего необходимое соотношение «Рс/Рф», где «Рс» - мощность сигнала; «Рф» - мощность фона отражений от подстилающей поверхности) и соответственно необходимую дальность обнаружения цели на фоне подстилающей поверхности. Для обеспечения режима синтезированной апертуры антенны РЛС работает в когерентном режиме.
Когерентность сигнала обеспечивается высокостабильным задающим генератором (4). На базе сигнала задающего генератора (4) fr высокочастотный зондирующий сигнал «fL» и все синхронизирующие импульсы для работы всех блоков формируются в синтезаторе частот - синхронизаторе (5), разработанным известными методами с использованием известной элементной базы. В таблице 1 приведено назначение выходных сигналов синтезатора частот синхронизатора и их соединение с блоками РЛС. В процессе движения носителя передатчик «L» (3) через антенну (1) излучает высокочастотные сигналы «fL», имеющие заданную длительность (τи) и частоту повторения (FL). Для формирования такого сигнала из задающего генератора (4) сигнал частоты «fr» поступает на первый вход синтезатора частот - синхронизатора (5), умножается до более высокой частоты «fL» и с выхода 11 синтезатора (5) поступает на вход усилителя мощности передатчика радиолокационного сигнала излучаемого антенной (см. таблицу 1). Также в синтезаторе частот - синхронизаторе (5), формируются сигналы с частотой fc=fL+fnp и «fnp» для преобразования поступающих с выходов 1 и 2 на входы 2 и 3 приемника (6) сигналов см. фиг.3,участвующих в формировании сигналов на промежуточной и доплеровских частотах.
Кроме того, путем деления частоты «fr» в синтезаторе частот - синхронизаторе (5), формируются и запускающие синхронизирующие импульсы, обеспечивающие согласование во времени работы всех элементов блоков РЛС.
В процессе движения носителя отраженные сигналы от поверхности и от целей с частотой «fi» принимаются антенной (1) и через циркулятор «L» (2) поступают в приемник «L» (6). В приемнике «L» (6) эти сигналы в узле СВЧ-смесителя приемника «L» (6) смешиваются с сигналом, поступающим с выхода 1 синтезатора «fc», в результате чего образуются отраженные сигналы на промежуточной частоте «fnp». Сигнал промежуточной частоты в усилителе промежуточной частоты (УПЧ) (8) усиливается и поступает на синхронные фазовые детекторы (9) и (10), на которые из синтезатора частот-синхронизатора (5) поступает сигнал «fnp» с частотой, равной промежуточной частоте. Причем на один из фазовых детекторов сигнал поступает со сдвигом по фазе на π/2. За счет движения носителя антенны (1) на выходах фазовых детекторов формируются синфазный yc(t) и квадратурный ys(t) сигналы доплеровской частоты. Далее оба сигнала yc(t) и ys(t) с помощью аналого-цифровых преобразователей (11) и (12) управляемого с помощью синхросигнала «fca» преобразуется в цифровую форму. С выходов АЦП (11) и (12) массив сигналов двух квадратур с помощью специальной многоразрядной магистральной линии поступает через коммутатор (15) в процессор сигналов (16) для обработки. Одновременно в процессоре данных (18) синхронизируемым сигналом «fnd», поступающим с выхода 9 синтезатора частот - синхронизатора (5), формируется опорная функция hc(t) и hs(t), комплексно сопряженная с траекторным сигналом, отраженным от объекта yt(t) и ys(t). Массив сигналов опорной функции с выхода 3 с помощью специальной магистрали МПИ ГОСТ 26765.51-86 подается в процессор сигналов (16) на вход 3.
В процессоре сигналов (16) производится их согласованная с траекторным сигналом когерентная обработка, в результате которой реализуется радиолокационное изображение с заданным линейным разрешением по азимуту. При этом обеспечивается необходимое соотношение сигнал/фон для заданной вероятности обнаружения.
Формирование опорной функции и согласованная обработка отраженных сигналов для получения радиолокационной информации производится в режиме синтезирования апертуры антенны (приведены на фиг.4 и 5).
В соответствии с приведенными схемами вычислитель опорной функции, фиг.5, снабжает процессор сигналов (16) требуемыми опорными сигналами «hc(t)» и «hs(t)» для данного алгоритма обработки, вычисленными на основе данных об ориентации зоны обзора и параметров траектории движения носителя, а также поступающих параметров из БРЭО инерциальной навигационной системы 19. Одновременно, преобразованный в АЦП в цифровую форму траекторный сигнал отражений, представленный в виде двух квадратурных составляющих yc(t) и ys(t), поступает в процессор сигналов (16) и записывается NRNn отсчетов в устройство памяти (фиг.4). При этом запись производится по дальности (R), а считывается по азимуту (n).
Считанный из памяти сигнал поступает в устройство умножения и суммирования, где умножается на сигналы опорной функции hc(t) и hs(t) по известной формуле, опорная функция вычисляется (фиг.5)

где W(t) - весовая функция;
V - скорость носителя;
Θ - угол азимута цели;
Rн - дальность до цели.
Радиовидение. Радиолокационные системы дистанционного зондирования Земли (стр.178), Москва, «Радиотехника», 2005
Результат перемножения поступает в устройство накопления (процессор БПФ). Комплексный сигнал с выхода процессора БПФ поступает в устройство вычисления модуля, на выходе которого формируется сигнал радиолокационной информации (РЛИ.)
В результате на выходе процессора сигналов (16) формируется массив цифровых кодов, соответствующих амплитуде сигналов, отраженных от каждого разрешаемого элемента по азимуту дальности в зоне обзора РЛС, т.е. цифровой аналог изображения местности и объекта, который передается в индикатор (17).
После обнаружения по индикатору (17) наземной цели оператор, применяя аппаратуру управления бортового радиоэлектронного оборудования (БРЭО), с помощью управляемого из БРЭО строба определяет ее координаты по дальности и азимуту. После стробирования по сигналу "к", выдаваемому из процессора данных (18), с выхода 1 автоматически включается радиолокационный канал миллиметрового диапазона (Ка) и начинается второй этап работы. По координатам азимута и дальности луч антенны (1) миллиметрового диапазона выставляется в направлении на объект. По сигналу "к" процессора данных (18) с помощью коммутатора (15) процессор сигналов переключается на прием и обработку сигналов приемника миллиметрового диапазона (14). Включается передатчик «Ка» (13) и через циркулятор (21) и антенну (1) излучает энергию в направлении на объект. РЛС работает также в режиме синтезирования апертуры, который обеспечивает обужение луча, необходимое для получения соотношения сигнал/фон для обнаружения цели на фоне подстилающей поверхности на заданной дальности. Отраженные сигналы от участка местности, определяемого размером луча, и от цели через антенну (1) циркулятор (21) поступают в приемник "Ка" (14). По своей структуре приемник "Ка" диапазона аналогичен приемнику "L" диапазона. Поэтому обработка сигналов в процессоре сигналов (16) с использованием процессора данных (18) для получения синтезированной апертуры антенны в «Ка» диапазоне производится аналогично дециметровому каналу, описанному выше.
После обработки отраженных сигналов радиолокационная информация поступает в индикатор (17). После обнаружения цели на индикаторе оператор применял аппаратуру управления БРЭО с помощью строба по дальности и азимуту выделяет ее и таким образом определяет ее координаты. Для повышения точности определения координат РЛС-миллиметрового диапазона может включаться режим сопровождения цели по углам азимута, углу места и дальности.
Эффективность технического решения
Реализация предложенной радиолокационной системы позволяет:
1. Обеспечить обнаружение малоразмерной неподвижной цели на фоне подстилающей поверхности в широком азимутном секторе на требуемой дальности и с необходимой точностью определения координат.
2. За счет применения двух каналов, работающих в различных диапазонах волн и использующих единое зеркало антенны, существенно сократить время на обнаружение и получение координат цели, которое не будет превышать время, затрачиваемое ПВО противника на подготовку и применение оружия.
Радиолокационная система для летательных аппаратов, содержащая радиолокационный канал миллиметрового диапазона радиоволн «Ка», содержащий антенну с датчиком углов, передатчик, циркулятор, приемник, содержащая также процессор сигналов и процессор данных, соединенные входом-выходом, задающий генератор, индикатор, синтезатор частот - синхронизатор, второй вход которого соединен со вторым выходом процессора данных, при этом вход-выход антенны соединен через циркулятор с первым входом приемника, передатчик, выход которого соединен со вторым входом циркулятора, а первый вход соединен с седьмым выходом синтезатора частот - синхронизатора, пятый выход которого соединен со вторым входом приемника, отличающаяся тем, что в нее введен радиолокационный канал дециметрового диапазона радиоволн, содержащий излучатель антенны, конструктивно совмещенный с зеркалом антенны радиолокационного канала миллиметрового диапазона радиоволн «Ка», циркулятор «L», передатчик «L», приемник «L», коммутатор, инерциально-навигационную систему, а синтезатор выполнен с дополнительным входом и выходами, причем его первый вход соединен с выходом задающего генератора, кроме того, третий вход приемника соединен с восьмым выходом синтезатора частот - синхронизатора, шестой выход которого соединен с четвертым входом приемника, а выход датчика углов антенны соединен с третьим входом процессора данных, при этом второй вход передатчика соединен с десятым выходом синтезатора частот - синхронизатора, процессор сигналов, второй вход которого соединен с четвертым выходом синтезатора частот - синхронизатора, а третий вход соединен с третьим выходом процессора данных, при этом девятый выход синтезатора частот - синхронизатора соединен с первым входом процессора данных, а третий его выход соединен с третьим входом процессора сигналов, причем выход процессора сигналов соединен с первым входом индикатора, второй вход которого соединен с первым входом бортового радиоэлектронного оборудования (БРЭО), а четвертый вход процессора данных соединен со вторым входом-выходом БРЭО, при этом первый вход циркулятора «L» соединен с входом-выходом излучателя антенны, а выход соединен с первым входом приемника «L», второй, третий и четвертый входы приемника «L» соответственно соединены с первым, вторым и третьим выходами синтезатора частот - синхронизатора, передатчик «L», выход которого соединен со вторым входом циркулятора «L», а второй вход соединен с двенадцатым выходом синтезатора частот - синхронизатора, одиннадцатый выход которого соединен с первым входом передатчика «L», коммутатор, первый вход которого соединен с выходом приемника «L», а второй вход соединен с выходом приемника радиолокационного канала миллиметрового диапазона радиоволн «Ка», третий вход соединен с первым выходом процессора данных, третий выход соединен с первым входом процессора сигналов, а второй вход процессора данных соединен с выходом инерциальной навигационной системы.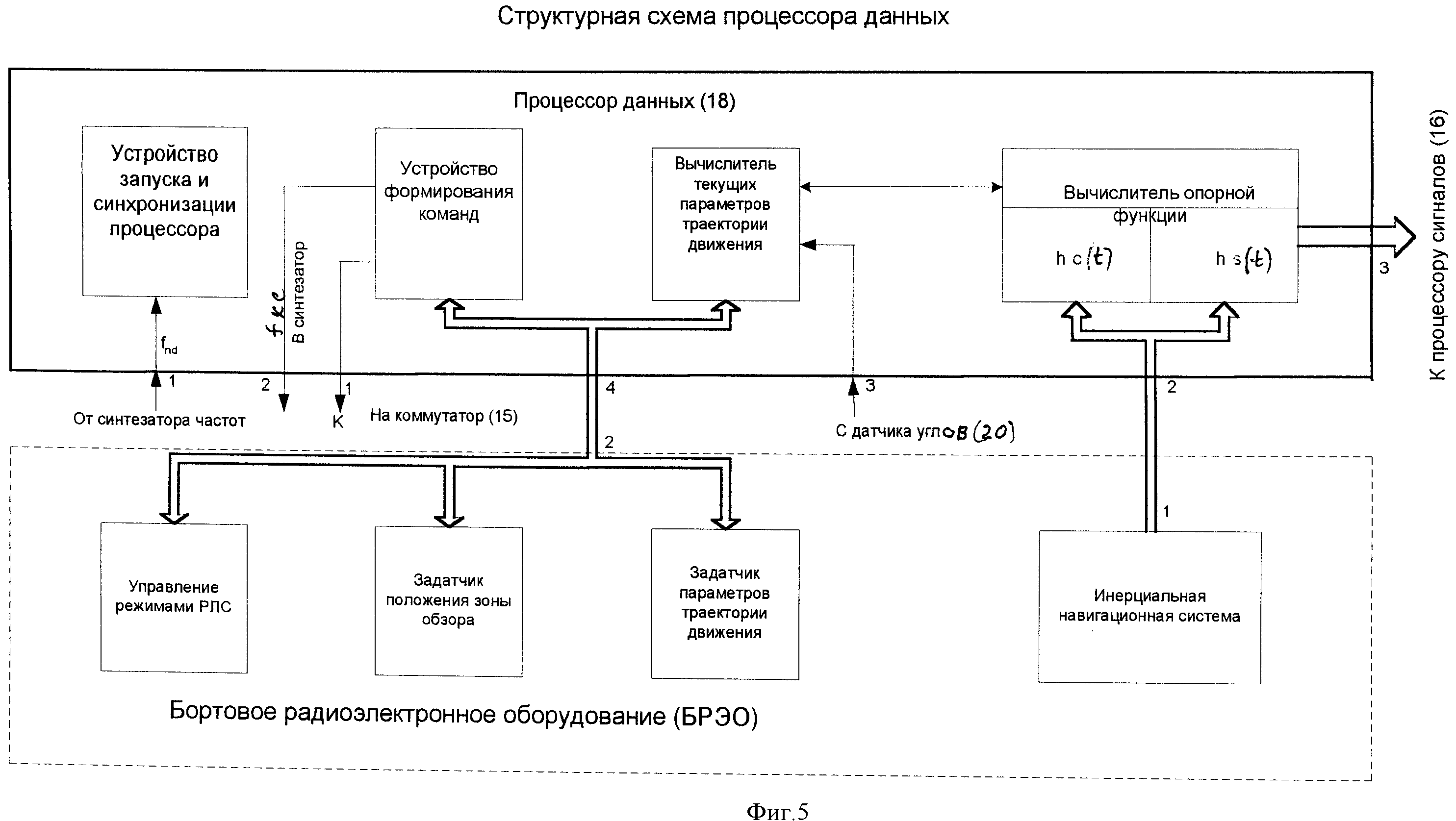
Способ разрешения групповой цели
Многофункциональная многодиапазонная масштабируемая радиолокационная система для летательных аппаратов
Фазированная антенная решетка с управляемой шириной диаграммы направленности
Радиолокационная станция с синтезированием апертуры и квазинепрерывным излучением
Способ цифрового формирования диаграммы направленности активной фазированной антенной решетки при излучении и приеме линейно-частотно-модулированного сигнала
Аналоговая фазостабильная волс
Дисковая печатная антенна с е-образной щелью
Устройство электромагнитного арретирования антенны бортовой радиолокационной станции
Способ восстановления изображений объектов по разреженной матрице радиометрических наблюдений
Способ обужения приемной диаграммы направленности антенны и многофункциональная радиолокационная станция для летательных аппаратов, реализующая этот способ
Способ разрешения групповой цели
Многофункциональная многодиапазонная масштабируемая радиолокационная система для летательных аппаратов
Фазированная антенная решетка с управляемой шириной диаграммы направленности
Радиолокационная станция с синтезированием апертуры и квазинепрерывным излучением
Способ цифрового формирования диаграммы направленности активной фазированной антенной решетки при излучении и приеме линейно-частотно-модулированного сигнала
Аналоговая фазостабильная волс
Дисковая печатная антенна с е-образной щелью
Устройство электромагнитного арретирования антенны бортовой радиолокационной станции
Способ восстановления изображений объектов по разреженной матрице радиометрических наблюдений
Способ обужения приемной диаграммы направленности антенны и многофункциональная радиолокационная станция для летательных аппаратов, реализующая этот способ

