Результат интеллектуальной деятельности: РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И КВАЗИНЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ
Вид РИД
Изобретение
Изобретение относится к радиолокации и может использоваться в радиотехнических системах, установленных на подвижных объектах, для картографирования земной (морской) поверхности или поверхностей других планет.
Известны:
1) Импульсная РЛС с синтезированием апертуры (В.Н.Антипов, В.Т.Горяинов, А.Н.Кулик и др. Радиолокационные станции с цифровым синтезированием апертуры антенны. - М.: Радио и связь, 1988 г., стр.304), содержащая когерентный приемо-передающий тракт с одной антенной (приемопередающая с циркулятором на прием и передачу) и цифровую систему обработки сигналов;
2) Голографическая РЛС (TIME FREQUENCY ANALYSIS - AN APPLICATION TO FMCW RADARS by BALAJI NAGARAJAN B.E., Electronics and Communication Engineering Hindustan College of Engineering, University of Madras Chennai, India - 2001 г.), содержащая небольшую передающую антенну и линейную приемную антенную решетку, а также блок памяти и процессор обработки сигналов;
3) РЛС бокового обзора (Г.С.Кондратенков, В.А.Потехин, А.П.Реутов, Ю.А.Феоктистов. Радиолокационные станции обзора земли. - М.: Радио и связь, 1983 г., стр.272; А.А.Комаров, Г.С.Кондратенков, Н.Н.Курилкин и др. Радиолокационные станции воздушной разведки. - М.: Воениздат, 1983 г., стр.152) с большой вдоль фюзеляжной антенной.
4) РЛС непрерывного излучения с синтезированием апертуры, содержащая когерентный приемопередающий тракт с двумя антеннами (приемная и передающая) и цифровую систему обработки сигналов (Антипов В.Н., Колтышев Е.Е., Мухин В.В., Печенников А.В., Фролов А.Ю., Янковский В.Т. Радиолокационная система беспилотного летательного аппарата. Радиотехника, 2006 г.) (прототип);
Недостатками этих устройств являются малая дальность действия у РЛС с непрерывным излучением, либо большая «мертвая» зона у РЛС с импульсным излучением того же уровня. Другие типы РЛС имеют низкую разрешающая способность по азимуту, высокий уровень импульсной мощности передающего устройства, высокие требования к вычислительной системе по объему памяти и быстродействию и низкую оперативность получения радиолокационного изображения (РЛИ) местности.
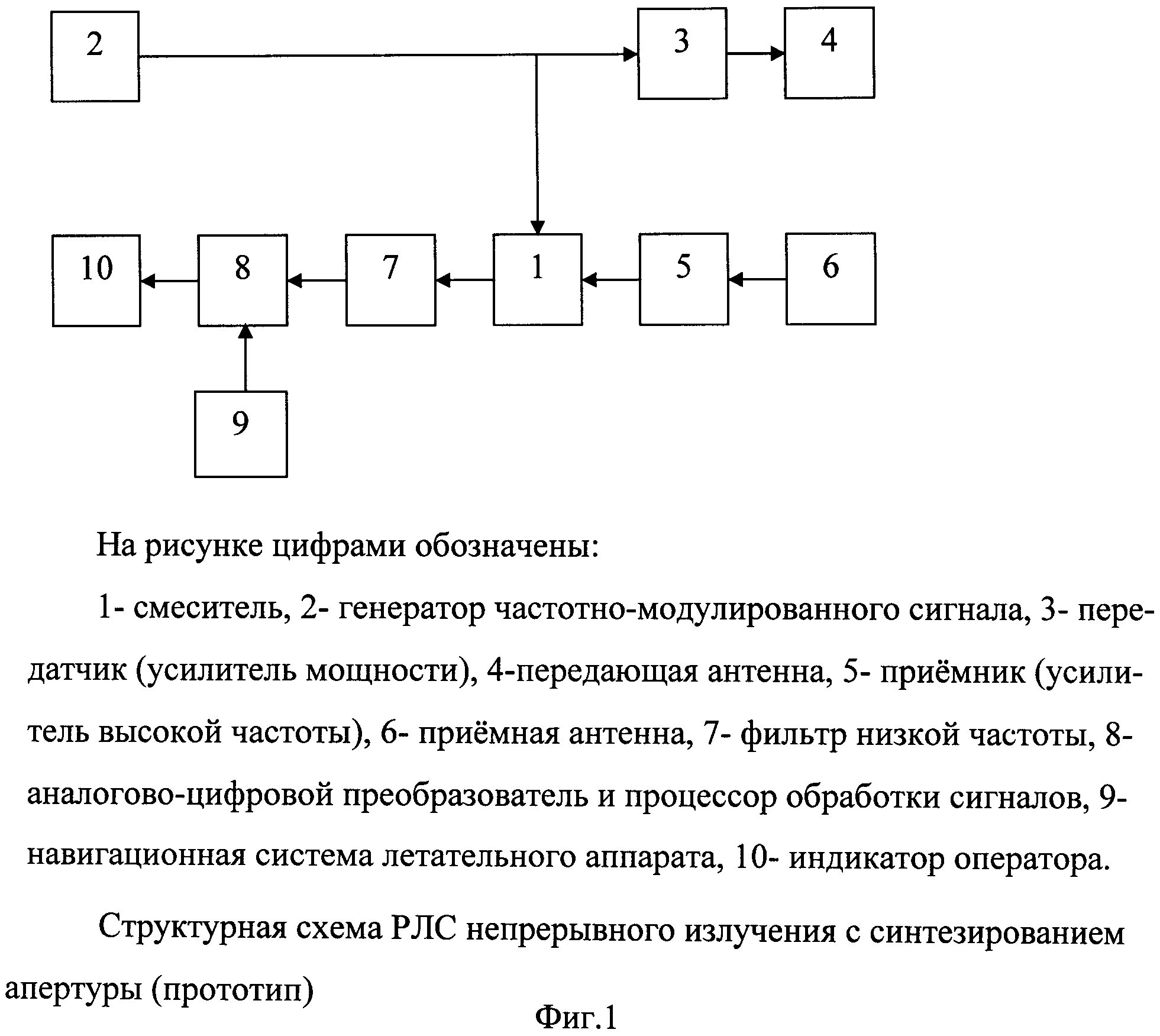
Из известных технических решений наиболее близким (прототипом) является РЛС непрерывного излучения с синтезированием апертуры (Антипов В.Н., Колтышев Е.Е., Мухин В.В., Печенников А.В., Фролов А.Ю., Янковский В.Т. Радиолокационная система беспилотного летательного аппарата. Радиотехника, 2006 г.). На фиг.1 изображена РЛС - прототип, содержит смеситель (1), первый вход которого соединен с выходом генератора частотно-модулированного сигнала (2) и через передатчик (усилитель мощности) (3) соединен с передающей антенной (4). Второй вход смесителя через приемник (усилитель высокой частоты) (5) соединен с выходом приемной антенны (6), а выход смесителя (1) соединен последовательно с фильтром низкой частоты (7), аналогово-цифровым преобразователем (АЦП) и процессором обработки сигналов (8). В АЦП и процессоре обработки сигналов реализовано синтезирование апертуры антенны путем сжатия сигнала по дальности, компенсации траекторных нестабильностей и гармонического анализа, при этом второй вход процессора соединен с навигационной системой летательного аппарата (9), а выход соединен с индикатором оператора (10).
Известное устройство работает следующим образом. Высокостабильный генератор частотно-модулированного сигнала (обычно по линейному закону - ЛЧМ) формирует высокочастотные колебания, которые поступают в передатчик (ПРД) и на один из входов смесителя. В передатчике ЛЧМ сигнал подвергается усилению до необходимой мощности и излучается в пространство передающей антенной.
Электромагнитные волны, отраженные от всех объектов в зоне обзора РЛС, принимаются приемной антенной и поступают в приемник (ПРМ), где усиливается и поступает на второй вход смесителя. С выхода смесителя сигнал фильтруется и поступает на вход аналогово-цифрового преобразователя (АЦП) и процессора цифровой обработки сигналов. В зависимости от решаемой задачи система обработки (цифровой процессор) реализует различные алгоритмы обработки траекторного сигнала, но основными операциями являются: синтезирование апертуры, сжатие сигнала по дальности, компенсация траекторных нестабильностей и гармонический анализ. На индикаторе оператора формируется радиолокационное изображение наблюдаемого участка земной поверхности и другая информация (координаты целей, отметки движущихся целей, результаты классификации целей и т.п.).
Недостатком прототипа является малая дальность действия РЛС. Дело в том, что для получения большой дальности действия необходим высокий энергетический потенциал РЛС. При ограниченных размерах антенны для достижения высокого потенциала необходимо повышать мощность передатчика. Однако при увеличении мощности передатчика увеличивается величина проникающего сигнала (помехи) из передающей антенны в приемную. Поэтому до тех пор, пока при увеличении мощности передатчика мощность проникающего сигнала не превышает уровень внутреннего шума приемника, дальность действия увеличивается. При превышении проникающим от передатчика сигналом мощности внутренних шумов приемника, дальнейшее увеличение мощности передатчика приводит к росту как полезного (отраженного) сигнала, так и мощности помехи (проникающего сигнала) и отношение сигнал помеха для заданной дальности остается постоянным. При увеличении дальности картографирования полезный сигнал уменьшается, а мощность помехи остается прежней и тем самым ухудшаются характеристики обнаружения и качество радиолокационного изображения местности. Кроме того, наличие проникающего сигнала требует расширения динамического диапазона приемника для того, чтобы пропустить полезный сигнал без искажений.
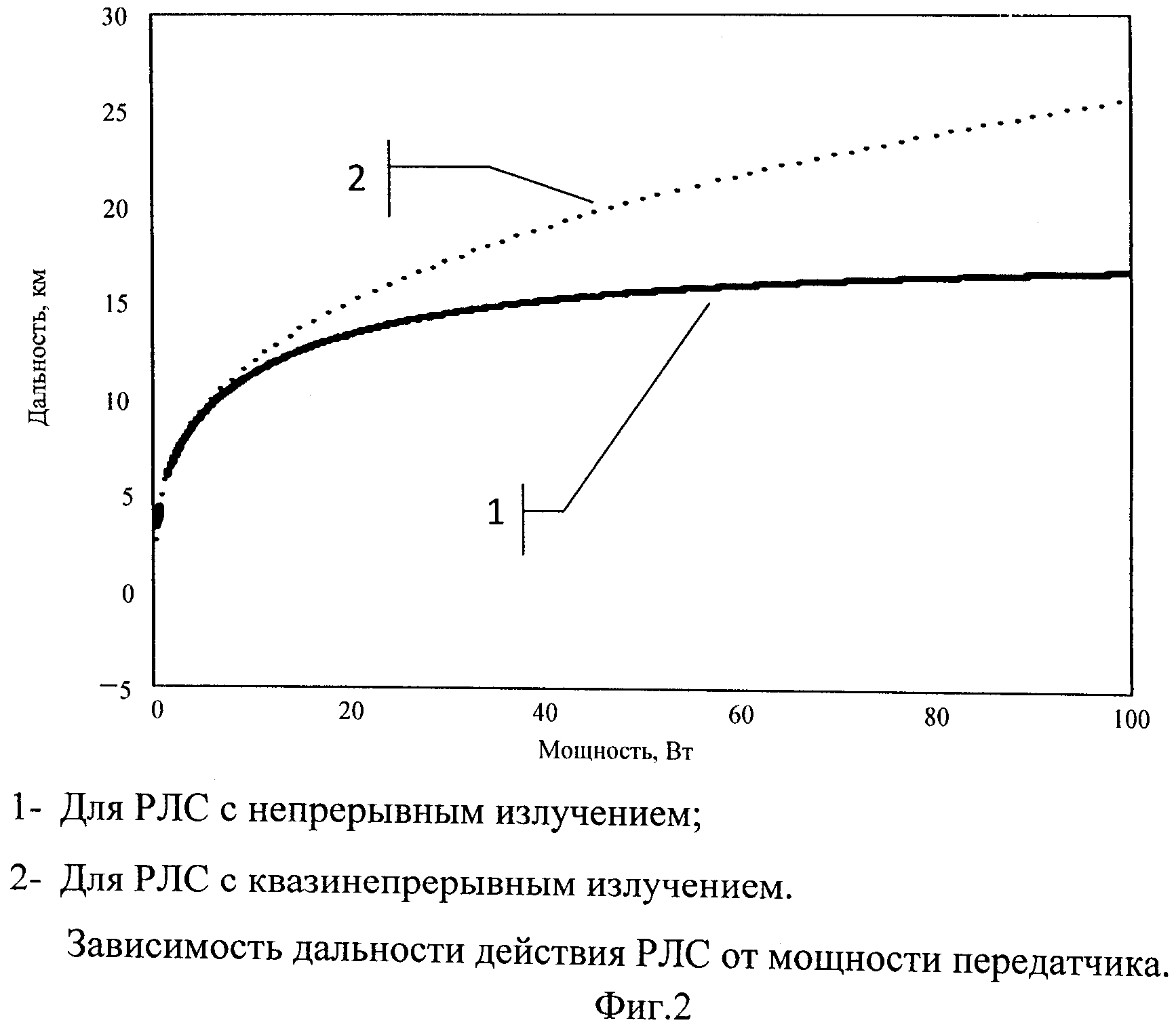
Даже обеспечив развязку между приемной и передающей антенной αp=-80 дБ, выбрав коэффициент подавления полосового фильтра, специально вводимого в схему приемного тракта для ослабления проникающего сигнала в αпф=-80 дБ и при уровне боковых лепестков фильтра сжатия по дальности αпф=-42 дБ, дальность действия ограничена 10…15 км. Эту закономерность иллюстрирует на Фиг.2 зависимость дальности картографирования от мощности передатчика при развязке между приемной и передающей антеннами в 80 дБ. Зависимости построены на основе формулы дальности для РЛС при КНД передающей антенны G=0,6(4πSA/λ2)=370; площади приемной антенны SA=0.045 м2 (0.3×0.15), коэффициенте шума приемника 4 дБ, скорости носителя V=30 м/с, αр= минус 80 дБ; αбл= минус 42 дБ; αпф= минус 80 дБ.
Таким образом, задачей изобретения является повышение дальности действия РЛС при сохранении малой «мертвой» зоны.
Поставленная задача достигается тем, что в РЛС непрерывного излучения с синтезированием апертуры дополнительно введены: циркулятор «прием-передача», второй приемный канал, в состав которого входят усилитель высокой частоты второго приемника, второй смеситель, второй фильтр низкой частоты; введены также управляемые аттенюатор, синхронизатор и привод антенной системы.
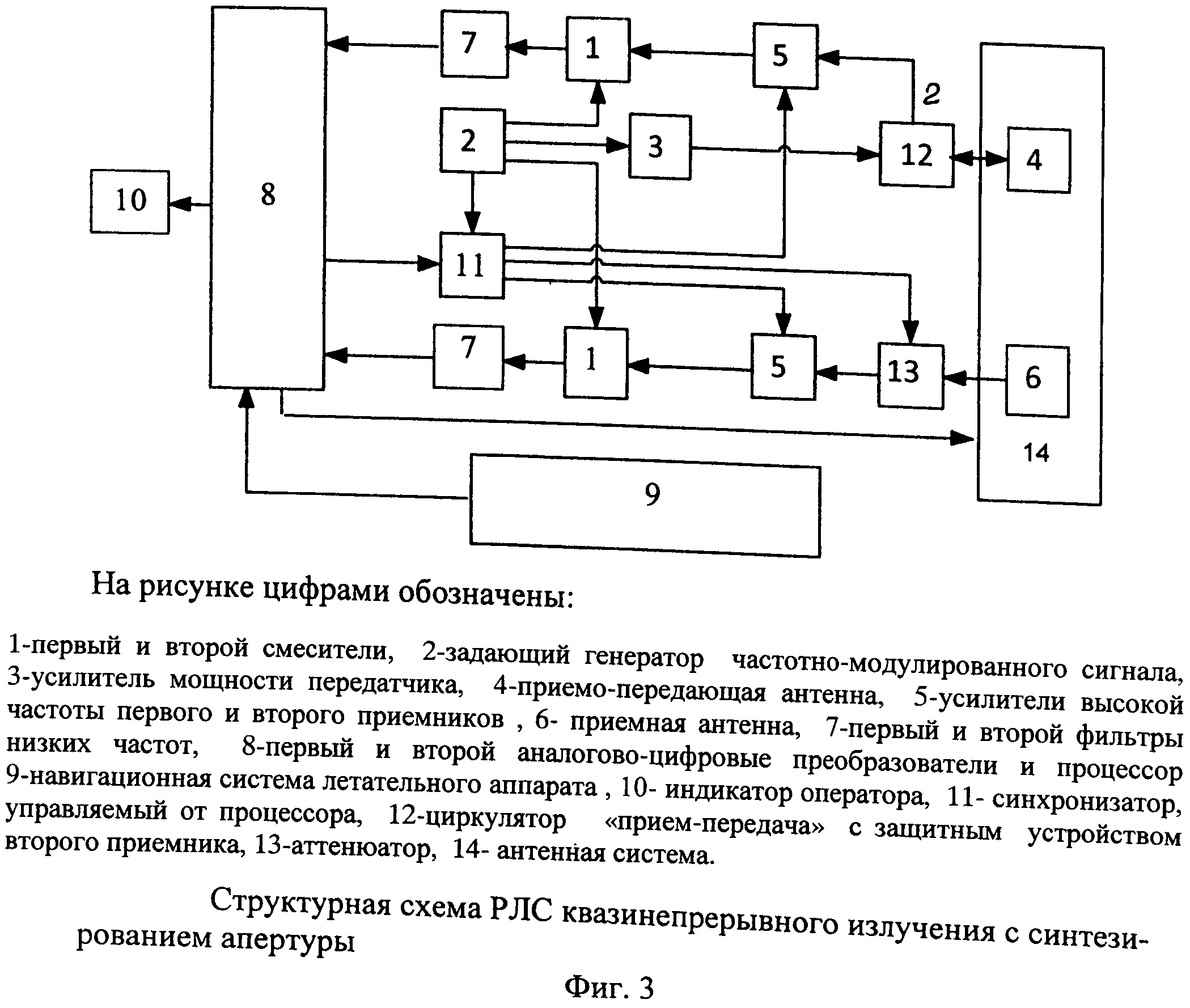
На фиг.3 представлена структурная схема РЛС с квазинепрерывным излучением и синтезированием апертуры, где;
1 - первый и второй смесители, в первом и втором приемном канале, 2 - задающий генератор частотно-модулированного сигнала, 3 - усилитель мощности передатчика, 4 - приемопередающая антенна, 5 - усилители высокой частоты первого и второго приемников, 6 - приемная антенна, 7 - первый и второй фильтры низких частот, 8 - первый и второй аналогово-цифровые преобразователи и процессор, 9 - навигационная система летательного аппарата, 10 - индикатор оператора, 11 - синхронизатор, управляемый от процессора, 12 - циркулятор «прием-передача» с защитным устройством второго приемника, 13 - управляемый аттенюатор, 14 - антенная система с приводим стабилизации.
Во второй дополнительно введенный приемный канал входят циркулятор «прием-передача» 12, который включен между усилителем мощности передатчика 3 и входом-выходом приемопередающей антенны 4, при этом второй выход циркулятора 12 последовательно соединен с входом усилителя высокой частоты второго приемника 5, вторым смесителем 1, вторым фильтром низкой частоты 7. Второй вход второго смесителя 1 подключен к третьему выходу задающего генератора 2.
Управляемый вход аттенюатора 13 подключен к первому выходу синхронизатора 11, второй вход аттенюатора соединен с выходом приемной антенны 6, а выход аттенюатора соединен с входом усилителя высокой частоты первого приемника 5.
Управляемый вход синхронизатора 11 соединен со вторым выходом АЦП и процессора 8, а второй вход синхронизатора 11 соединен с первым выходом задающего генератора 2. Синхронизатор 11 вторым и третьим выходами соединен соответственно со вторыми входами усилителей высокой частоты первого и второго приемников 5.
Задающий генератор 2 вторым выходом соединен с входом усилителя мощности передатчика 3, а третий и четвертый выходы генератора 2 связаны со вторыми входами соответственно первого и второго смесителей.
Первый выход процессора 8 соединен с входом индикатора оператора 10, а третий его выход подключен к приводу 14 стабилизации антенн 4 и 6, третий вход процессора 8 соединен с выходом навигационной системы 9.
Изобретение представлено следующими графическими материалами:
- на фиг. 1 изображена структурная схема РЛС непрерывного излучения с синтезированием апертуры (прототип);
- на фиг. 2 изображена зависимость дальности действия РЛС с непрерывным излучением и квазинепрерывном излучением от мощности передатчика в режиме синтезирования апертуры;
- на фиг. 3 изображена структурная схема РЛС квазинепрерывного излучения с синтезированием апертуры;
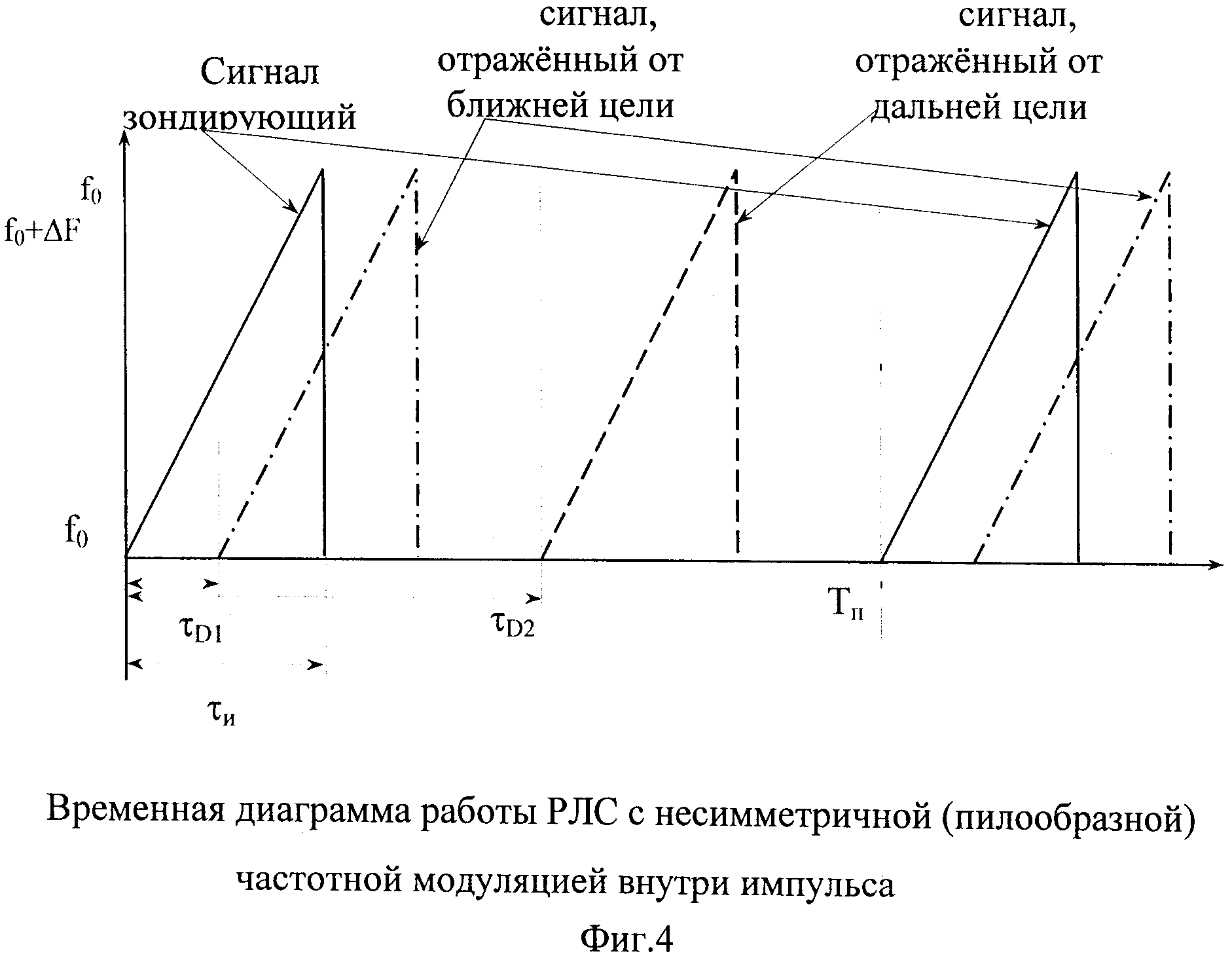
- на фиг 4 изображена временная диаграмма работы РЛС с квазинепрерывным излучением с несимметричной (пилообразной) частотной модуляцией внутри импульса.
В РЛС с квазинепрерывным излучением обычно применяют импульсные сигналы с симметричной или несимметричной линейной частотной модуляцией зондирующего сигнала. В качестве примера рассмотрим временную диаграмму работы РЛС с несимметричной (пилообразной) частотной модуляцией внутри импульса (фиг.4).
Зондирующий сигнал при несимметричной частотной модуляции можно представить в виде:

=0, при других значения t.
где а0 - амплитуда зондирующего сигнала, f0 - центральная частота; kлчм=ΔF/Тп - коэффициент частотной модуляции; ΔF - девиация частоты; τИ - длительность импульса; Тп - период повторения импульсов (фиг.4), где n - номер периода зондирования; N - число импульсов на интервале синтезирования.
Отраженный от цели сигнал описывается выражением

где  - комплексная амплитуда сигнала, θ - азимутальная координата цели; τ(θ)=2r(θ)/с - задержка сигнала, вызванная распространением сигнала до цели и обратно; r(θ) - расстояние от фазового центра антенны до цели.
- комплексная амплитуда сигнала, θ - азимутальная координата цели; τ(θ)=2r(θ)/с - задержка сигнала, вызванная распространением сигнала до цели и обратно; r(θ) - расстояние от фазового центра антенны до цели.
Сигнал, отраженный от i-ого отражателя на выходе смесителя, имеет вид:

В выражении (3) для простоты дальнейших выкладок положено, что а0=1.
Первый экспоненциальный сомножитель в выражении (3) определяет частоту сигнала на выходе смесителей. Эта частота пропорциональна времени распространения сигнала до цели и обратно:

Второй сомножитель описывает постоянную фазу сигнала.
Зависимость частоты сигнала на выходе смесителей от дальности до цели используется для разрешения целей по дальности. Разрешение по частоте определяется временем накопления сигнала Тн: δf=1/Тн. Тогда разрешающая способность по дальности будет определяться выражением:
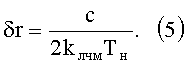
Например, при девиации частоты ΔF=120 МГц, периоде частотной модуляции Тн=1 кГц и малых расстояниях от РЛС до цели (τi<<Тп), когда можно считать, что Тн≈Тп разрешающая способность по дальности составит 1,25 м. Аналогично работает РЛС при измерении высоты полета (дальности до земли), обеспечивая высокую точность. Для снижения уровня боковых лепестков по дальности могут использоваться различные весовые функции. Например, использование весовой функции Хемминга приводит к снижению боковых лепестков до -42,8 дБ при ухудшении разрешения по дальности в 1,3 раза.
Таким образом, процедура сжатия сигнала по дальности в каждом периоде модуляции заключается в умножении принимаемого сигнала на зондирующий сигнал, с последующим преобразованием Фурье (спектральный анализ). В результате формируется линейка отсчетов сигнала по дальности с высоким разрешением в пределах заданной зоны обзора по дальности. Дальнейшая обработка пачки, полученной в соседних периодах модуляции, аналогична синтезированию апертуры при периодическом импульсном зондирующем сигнале. Следует отметить, что приемник можно выполнить по супергетеродинной схеме и вместо одного УВЧ и смесителя использовать несколько схем преобразований по частоте.
Предлагаемое устройство обеспечивает наблюдение целей в большем диапазоне дальностей за счет использования более высокого энергетического потенциала РЛС без увеличения мертвой зоны. Управление режимами (зонами картографирования) обеспечивается процессором 8 и синхронизатором 11. При малой дальности картографирования, когда отраженный сигнал поступает в приемник 5 в момент излучения передатчика 3 (временная диаграмма на фиг.4), синхронизатор 11 вводит затухание аттенюатора 13 для защиты приемника и сохранения его динамического диапазона, уменьшая мощность проникающего сигнала передатчика до уровня внутренних шумов приемника, отпирает первый УВЧ 5 (второй УВЧ заперт) и РЛС работает по схеме с непрерывным излучение.
Наоборот, при большой дальности картографирования, когда отраженный сигнал поступает в приемники 5 после излучения передатчика 3 (фиг.4), синхронизатор 11 отпирает оба приемника и сигналы, принимаемые двумя антеннами 4 и 6 (для увеличения общего коэффициента направленного действия антенной системы), обрабатываются по аналогии с обработкой в РЛС с синтезированием апертуры с импульсным сигналом. Путем управления режимами стробирования первого и второго УВЧ 5 и управляемого аттенюатора 13 можно картографировать местность на различных дальностях: от практически нулевой, которая ограничена высотой полета носителя, до максимальной, которая ограничена мощностью передатчика.
В реальном полете летательный аппарат (ЛА) подвержен колебаниям по курсу, крену и тангажу. Эти колебания приводят к случайным блужданиям антенны по поверхности земли и модуляции отраженного сигнала по амплитуде, что приводит к яркостной модуляции изображения. Для стабилизации антенной системы в пространстве навигационная система летательного аппарата измеряет величину колебаний по курсу, крену и тангажу и процессор вырабатывает сигналы управления приводом стабилизации антенной системы для парирования этих колебаний, исключая амплитудную модуляцию отраженного сигнала. Отметим также, что при небольших колебаниях носителя по курсу (величина колебаний не превышает ширину диаграммы направленности по азимуту) привод антенны может отсутствовать.
Для выполнения заявленного устройства может быть использована элементная база, выпускаемая в настоящее время отечественной промышленностью.
Использование изобретения по сравнению с прототипом за счет введения циркулятора «прием-передача», второго приемного канала и системы обработки сигнала в моменты времени, когда передатчик не излучает, обеспечивает большую дальность действия. Введение управляемого аттенюатора обеспечивает ослабление мощность проникающего от передатчика сигнала и тем самым обеспечивает защиту приемника и снижение требований к его динамическому диапазону. Управление режимами стробирования приемников обеспечивает требуемую дальность картографирования. Введение привода антенной системы, связанного с навигационной системой носителя через вычислитель устраняет яркостную модуляцию изображения местности, вызванную колебаниями носителя в полете.
Многофункциональная многодиапазонная масштабируемая радиолокационная система для летательных аппаратов
Фазированная антенная решетка с управляемой шириной диаграммы направленности
Способ цифрового формирования диаграммы направленности активной фазированной антенной решетки при излучении и приеме линейно-частотно-модулированного сигнала
Радиолокационная система для летательных аппаратов
Аналоговая фазостабильная волс
Дисковая печатная антенна с е-образной щелью
Устройство электромагнитного арретирования антенны бортовой радиолокационной станции
Способ обужения приемной диаграммы направленности антенны и многофункциональная радиолокационная станция для летательных аппаратов, реализующая этот способ
Способ функционирования импульсно-доплеровской бортовой радиолокационной станции при обнаружении воздушной цели - носителя станции радиотехнической разведки
Моноимпульсная трехканальная суммарно-разностная радиолокационная станция
Многофункциональная многодиапазонная масштабируемая радиолокационная система для летательных аппаратов
Фазированная антенная решетка с управляемой шириной диаграммы направленности
Способ цифрового формирования диаграммы направленности активной фазированной антенной решетки при излучении и приеме линейно-частотно-модулированного сигнала
Радиолокационная система для летательных аппаратов
Аналоговая фазостабильная волс
Дисковая печатная антенна с е-образной щелью
Устройство электромагнитного арретирования антенны бортовой радиолокационной станции
Способ обужения приемной диаграммы направленности антенны и многофункциональная радиолокационная станция для летательных аппаратов, реализующая этот способ
Способ функционирования импульсно-доплеровской бортовой радиолокационной станции при обнаружении воздушной цели - носителя станции радиотехнической разведки
Бортовая активная фазированная антенная решетка х-диапазона с увеличенным сектором сканирования

