Результат интеллектуальной деятельности: СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМОЙ РАКЕТОЙ
Вид РИД
Изобретение
Изобретение относится к области вооружения, в частности к управлению ракетой с лазерной полуактивной головкой самонаведения, захватывающей подсвеченную цель на конечном участке траектории.
Изобретение предназначено для управления огнем минометов и ствольной артиллерии при стрельбе управляемыми боеприпасами, в том числе управляемыми ракетами.
Известен способ стрельбы управляемой ракетой с лазерной полу активной головкой самонаведения [Патент RU №2468327 от 15.11.2011 г. - Способ стрельбы управляемой ракетой с лазерной полуактивной головкой самонаведения], выбранный нами за прототип.
Разведчик на контрольно-наблюдательном пункте обнаруживает и сопровождает цель лазерным целеуказателем-дальномером, передает координаты цели на огневую позицию, откуда производится стрельба по сопровождаемой цели управляемой ракетой, которая захватывает подсвеченную лучом лазера цель на конечном участке траектории.
Названный способ заключается в следующем: производят обнаружение цели целеуказателем, измерение целеуказателем азимута и дальности до цели, топографическую привязку целеуказателя и цели к местности, причем топографическую привязку цели к местности осуществляют в пульте разведчика расчетным путем. После этого в пульте разведчика координаты цели преобразуют в последовательность двоичных кодов и передают их по цифровой радиосвязи в пульт управления огневой позиции. В пульте разведчика и в пульте управления огневой позиции устанавливают единое компьютерное время. Выполняют топографическую привязку пусковой установки к местности с помощью аппаратуры спутниковой навигации пульта управления огневой позиции. Устанавливают пульт управления огневой позиции вместе со средствами цифровой радиосвязи на расстоянии 50-100 метров от пусковой установки и обеспечивают, чтобы погрешность топопривязки пусковой установки, целеуказателя и цели по каждому измерению географической системы координат не превышала 50 метров. Рассчитанные в пульте управления огневой позиции установки стрельбы по пусковой установке и ракете передают в двоичном коде в блок автоматики пусковой установки и далее в ракету. Разворачивают пусковую установку по углам азимута и места установок стрельбы и производят пуск ракеты по цели, подсвеченной целеуказателем, причем сигнал на включение целеуказателя передают с пульта управления огневой позиции в пульт разведчика, сигнал на пуск ракеты передают с пульта управления огневой позиции в блок автоматики пусковой установки в двоичном коде, а задержка передачи сигнала на включение целеуказателя с пульта управления огневой позиции в пульт разведчика после пуска ракеты не превышает 3-6 секунд.
Недостатком данного способа является невозможность перенацеливания ракеты во время полета при стрельбе на значительную дальность (более 50 км) по движущейся цели или неожиданно появившейся второй, более приоритетной, цели.
Задачей предлагаемого изобретения является обеспечение возможности перенацеливания ракеты во время полета при стрельбе на дальность более 50 км по движущейся цели или по второй, более приоритетной, цели.
Для достижения указанной задачи в известном способе стрельбы управляемой ракетой, включающем обнаружение цели целеуказателем, измерение целеуказателем азимута и дальности до цели, топографическую привязку пусковой установки, целеуказателя и цели к местности, причем топографическую привязку цели к местности осуществляют в пульте разведчика расчетным путем, передачу координат цели из пульта разведчика в пульт управления огневой позиции по цифровой радиосвязи, установление единого компьютерного времени в пульте разведчика и в пульте управления огневой позиции, расчет в пульте управления огневой позиции и реализацию установок стрельбы ракеты и пусковой установки, пуск и наведение ракеты на цель, новым является то, что дополнительно определяют угол места цели относительно целеуказателя и устанавливают единое компьютерное время в ракете, а после пуска ракеты последовательно осуществляют топопривязку к местности летящей ракеты с помощью аппаратуры спутниковой навигации, обнаружение второй, более приоритетной, цели, измерение целеуказателем азимута, угла места и дальности до второй цели, топографическую привязку второй цели к местности в пульте разведчика, передачу координат второй цели из пульта разведчика в пульт управления огневой позиции по цифровой радиосвязи, расчет установок стрельбы ракеты по второй цели и передачу их на ракету по цифровой радиосвязи, разворот и наведение ракеты на вторую цель, а также передачу в пульт управления огневой позиции с ракеты сообщения о работе по второй цели.
Реализация предлагаемого способа поясняется блок-схемой, приведенной на чертеже.
Предлагаемый способ стрельбы ракетой реализуется следующим образом. Огневая позиция располагается на большой дальности от линии соприкосновения с противником. К линии боевого соприкосновения высылается разведчик с лазерным целеуказателем-дальномером (ЛЦД) 1, гирокомпасом 2, пультом разведчика 3, аппаратурой спутниковой навигации 4 и цифровой радиостанцией 5, причем выходы ЛЦД 1, гирокомпаса 2, аппаратуры спутниковой навигации 4 и цифровой радиостанции 5 через разъемы и адаптеры подключены к процессору пульта разведчика 3.
ЛЦД 1 с дальномером и визирным каналом служит для обнаружения и сопровождения цели, а также для определения координат цели, например азимута, угла места и дальности до цели относительно ЛЦД 1.
С помощью аппаратуры спутниковой навигации 4 и гирокомпаса 2 определяются координаты ЛЦД 1 в прямоугольной географической системе координат и вводятся в пульт разведчика 3.
Разведчик с помощью ЛЦД 1 производит замер азимута, угла места и дальности до цели. Результаты замеров вводятся в пульт разведчика 3, преобразуются, например, в земную систему координат топографической привязки цели к местности, отображаются на экране пульта разведчика 3, преобразуются в последовательность двоичных кодов, например, по стандарту EIA интерфейса RS232C и передаются в пульт управления огневой позиции 7 по цифровой радиосвязи.
В пульте управления огневой позиции 7 выполняют топографическую привязку пусковой установки к местности, например, с аппаратуры спутниковой навигации 6, вводятся координаты широты, долготы и высоты пусковой установки, с клавиатуры вводят данные для баллистических расчетов (весовой коэффициент ракеты, температура заряда), метеоданные (метеобюллетень или результаты наземных метеоизмерений).
Пульт управления огневой позиции 7 подключают с помощью кабелей к блоку автоматики 9 пусковой установки, к аппаратуре спутниковой навигации 6 и к цифровой радиостанции 8.
С помощью аппаратуры спутниковой навигации 4 в пульте разведчика 3, аппаратуры спутниковой навигации 6 в пульте управления огневой позиции 7 и аппаратуры спутниковой навигации 11 в ракете устанавливают единое компьютерное время.
В пульте управления огневой позиции 7 с использованием полученных по радиосвязи координат цели автоматически вычисляются установки стрельбы пусковой установки и ракеты. Расчет углов наведения стрельбы пусковой установки выполняется, например, по зависимостям, приведенным в [Патент RU №2111437 от 20.05.98 г. - Способ и устройство наводки орудия].
Расчет установок стрельбы ракеты может включать траекторию полета, определение времени подлета к цели и времени включения головки самонаведения.
С использованием гирокомпаса 10 осуществляется наведение пусковой установки на цель по установкам стрельбы (по углам азимута и места).
Установки стрельбы ракеты, определяющие циклограмму ее полета, передаются в двоичном коде в блок автоматики 9 пусковой установки и далее в запоминающее устройство ракеты.
Бойцы расчета огневой позиции выполняют разворот пусковой установки, вводят установки стрельбы в ракету и после этого укрываются в окопе (блиндаже) в 50-100 метрах от пусковой установки; оттуда ведется пуск ракеты.
После этого, как правило, по речевому каналу связи на контрольно-наблюдательный пункт, где находится заместитель командира, передается доклад о готовности пусковой установки к пуску. С контрольно-наблюдательного пункта по речевому каналу связи подается команда «Пуск». По этой команде на огневой позиции осуществляется пуск ракеты.
Перед пуском блок автоматики 9 пусковой установки формирует напряжения, необходимые для реализации циклограммы пуска ракеты.
В момент пуска на пульте управления огневой позиции 7 командиром включается кнопка «Пуск» и автоматически формируется сообщение в пульт разведчика 3 о пуске. При этом с таймера часов системы единого времени с пульта управления огневой позиции 7 считывается время выстрела и назначается время задержки включения ЛЦД 1 в режиме подсвета цели, учитывая общее время полета ракеты. Значение времени включения подсвета цели передается в пульт разведчика 3 в виде последовательности двоичных кодов.
С помощью аппаратуры спутниковой навигации 11, установленной на ракете, автоматически выполняется топопривязка к местности ракеты в течение всего времени ее полета.
При обнаружении разведчиком неожиданно появившейся второй, более приоритетной (опасной) цели, как правило, близкой к первой, разведчик берет ее на сопровождение и продолжает ее сопровождать до поражения. Разведчик с помощью ЛЦД 1 производит замер азимута, угла места и дальности до второй цели. Результаты замеров вводятся в пульт разведчика 3, преобразуются, например, в земную систему координат топографической привязки к местности, отображаются на экране пульта разведчика 3, преобразуются в последовательность двоичных кодов, например, по стандарту EIA интерфейса RS232C и передаются в пульт управления огневой позиции 7 по цифровой радиосвязи вместе с признаком перенацеливания.
В пульте управления огневой позиции 7 с использованием полученных по радиосвязи координат второй цели и рассчитанным координатам летящей ракеты автоматически вычисляются установки стрельбы летящей ракеты по второй цели. Эти установки определяют новую траекторию полета ракеты. С помощью средств цифровой радиосвязи 8, 12 установки стрельбы по второй цели передаются в двоичном коде в запоминающее устройство ракеты.
После этого автоматически выполняется разворот и наведение ракеты на вторую цель и передача с ракеты в пульт управления огневой позиции 7 с помощью средств цифровой радиосвязи 12, 8 сообщения о работе по второй цели.
Под второй целью может быть сама исходная цель, имеющая высокую скорость движения и вышедшая за 25-40 секунд полета ракеты из зоны захвата головкой самонаведения управляемой ракеты. Повторный замер координат сместившейся цели и корректировка траектории полета ракеты по второму варианту установок позволяет существенно повысить эффективность стрельбы управляемой ракетой.
Разведчик через ЛЦД 1 продолжает сопровождать вторую цель, держать ее в перекрестии визирного канала.
В пульте разведчика 3 автоматически устанавливается время включения ЛЦД 1, исходя из показаний единого времени пульта разведчика 3 и времени включения подсвета цели, переданного с пульта управления огневой позиции 7. В соответствующий момент времени сигнал из пульта разведчика 3 выдается по цифровому интерфейсу, например RS232, в ЛЦД 1 и луч лазера подсвечивает цель.
После пуска ракеты пусковую установку можно переводить в походное положение и перевозить на новую позицию.
При подлете ракеты к цели головка самонаведения на ракете сканирует земную поверхность в поисках следа луча лазера. При обнаружении лазерного пятна в управляемой ракете вырабатываются команды на рули, обеспечивающие разворот ракеты в центр лазерного пятна.
Время включения ЛЦД 1 может выбираться постоянным и равным, например, 12 секундам до подлета ракеты к цели. При таком включении подсвета цели за фиксированный отрезок времени до встречи с целью проще организуется работа системы управления ракеты и допускаются возможные корректировки траектории. Для включения ЛЦД 1 на подсвет до подлета ракеты к цели экспериментально установлено, что оптимальная задержка передачи сигнала на включение ЛЦД 1 должна составлять 3-6 секунд.
Представления координат в данном способе могут производиться с использованием следующих систем координат.
Привязку к местности ЛЦД 1, огневой позиции и ракеты желательно производить в географической системе координат (СК) с фиксацией широты, долготы и высоты местостояния.
ЛЦД 1 фиксирует цель в сферической СК с измерением дальности и углов наведения (азимута и угла места) ЛЦД 1. В пульте разведчика 3 координаты цели, введенные с ЛЦД 1, преобразуются в географическую СК. Через радиосвязь координаты топографической привязки цели в географической СК поступают в пульт управления огневой позиции 7.
В пульте управления огневой позиции 7 по координатам цели и огневой позиции определяют дальность до цели, перепад высот, а также производят расчет установок стрельбы в сферической СК, связанной с пусковой установкой, причем ось Х системы координат ориентирована на север. По этим координатам наводят пусковую установку.
Ракета на первом участке при полете с маршевым двигателем движется по траектории, определяемой наводкой пусковой установки. На втором участке после завершения работы маршевого двигателя до включения головки самонаведения траектория полета ракеты корректируется по отклонениям положения ракеты относительно траектории полета, заданной при установках стрельбы. После включения головки самонаведения управление ракетой идет в сферической СК, связанной с продольной осью ракеты.
Предлагаемый способ применим дополнительно в следующем случае. Когда ЛЦД 1, гирокомпас 2, пульт разведчика 3, аппаратура спутниковой навигации 4 и цифровая радиостанция 5 контрольно-наблюдательного пункта расположены на беспилотном летательном аппарате и функции контрольно-наблюдательного пункта выполняет сам беспилотный летательный аппарат. Он и обнаруживает цель, и выполняет в пульте разведчика 3 топографическую привязку к местности своего положения в пространстве и топографическую привязку цели, передает эти координаты на пульт управления огневой позиции 7 по цифровой радиосвязи и обеспечивает подсвет цели ЛЦД 1 при подлете ракеты. Реализация такого беспилотного летательного аппарата описана в каталоге [Оружие России, Москва, ООО «Военный Парад», 2012 г., стр.533-534].
Для реализации предлагаемого способа могут применяться следующие устройства.
В качестве ЛЦД 1, гирокомпаса 2, 10, аппаратуры спутниковой навигации 4, 6, пульта разведчика 3, цифровой радиостанции 5, 8, и пульта управления огневой позиции 7 могут быть использованы приборы, описанные в «Способе стрельбы управляемым снарядом с лазерной полуактивной головкой самонаведения» [Патент RU №2247297 от 27.02.2005 г.].
В качестве блока автоматики 9 может быть использован блок автоматики комплекса «Гермес-А», описанный в [Многоцелевой ракетный комплекс ВТО вертолетного базирования, «Горизонты КБП», №3, 2007 г., стр.36-38].
В качестве пусковой установки может быть использована пусковая установка, описанная на стр.365 в книге [Высокоточное оружие зарубежных стран. Том 1. Противотанковые ракетные комплексы: обзорно-аналитический справочник. / Конструкторское бюро приборостроения. - Тула: Издательство «Бедретдинов и Ко», 2008 г.].
Ракета описана на стр.39 публикации [«Гермес-К» - легкий, многоцелевой, дальнобойный, журнал «Военный парад», №3, 2009 г., стр.38-40]. Ракета может иметь комбинированную систему наведения: бортовую инерциальную систему наведения с коррекцией траектории по сигналам спутниковой системы навигации ГЛОНАСС/GPS на первом и втором участках полета и высокоточную систему наведения с помощью лазерной полуактивной головки самонаведения на конечном участке полета. На ракете могут быть установлены аппаратура спутниковой навигации 11 и цифровая радиостанция 12 функционально аналогичные аппаратуре спутниковой навигации 4, 6 и цифровой радиостанции 5, 8, расположенным на контрольно-наблюдательном пункте и огневой позиции, но выполненные в другом конструктивном исполнении.
Предлагаемый способ стрельбы ракетой по сравнению с прототипом позволяет обеспечить возможность перенацеливания ракеты во время полета при стрельбе на дальность более 50 км по движущейся цели или второй, более приоритетной, цели. Эффективность предложенного способа стрельбы подтверждена на комплексном моделирующем стенде предприятия.
Способ стрельбы управляемой ракетой, включающий обнаружение цели целеуказателем, измерение целеуказателем азимута и дальности до цели, топографическую привязку пусковой установки, целеуказателя и цели к местности, причем топографическую привязку цели к местности осуществляют в пульте разведчика расчетным путем, передачу координат цели из пульта разведчика в пульт управления огневой позиции по цифровой радиосвязи, установление единого компьютерного времени в пульте разведчика и в пульте управления огневой позиции, расчет в пульте управления огневой позиции и реализацию установок стрельбы ракеты и пусковой установки, пуск и наведение ракеты на цель, отличающийся тем, что дополнительно определяют угол места цели относительно целеуказателя и устанавливают единое компьютерное время в ракете, а после пуска ракеты последовательно осуществляют топопривязку к местности летящей ракеты с помощью аппаратуры спутниковой навигации, обнаружение второй, более приоритетной, цели, измерение целеуказателем азимута, угла места и дальности до второй цели, топографическую привязку второй цели к местности в пульте разведчика, передачу координат второй цели из пульта разведчика в пульт управления огневой позиции по цифровой радиосвязи, расчет установок стрельбы ракеты по второй цели и передачу их на ракету по цифровой радиосвязи, разворот и наведение ракеты на вторую цель, а также передачу в пульт управления огневой позиции с ракеты сообщения о работе по второй цели.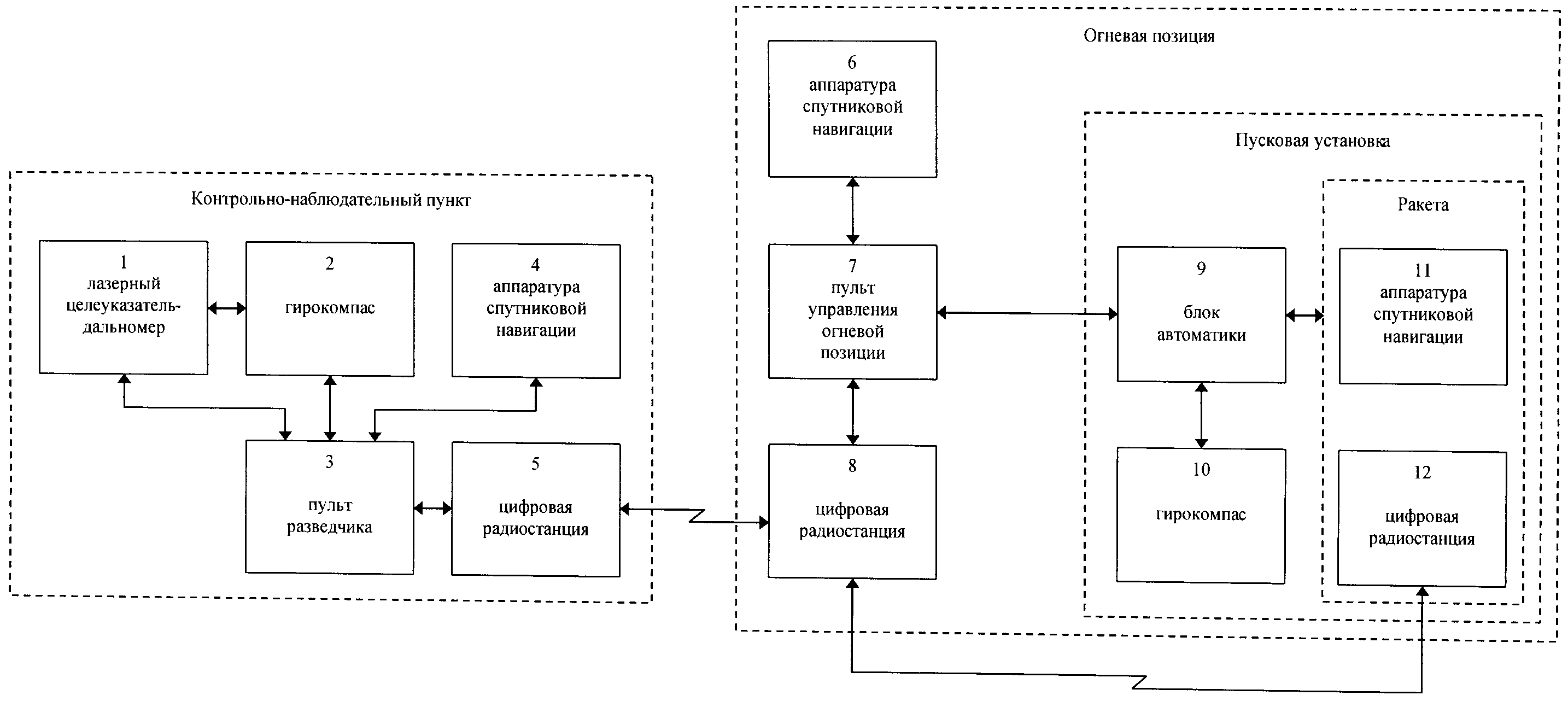
Способ прямого наведения вооружения на цель при охране объекта
Пульт управления
Зенитная пушечно-ракетная боевая машина
Воздушно-динамический блок рулевого привода управляемого летательного аппарата
Способ прямого наведения вооружения на цель при охране объекта
Способ прямого наведения вооружения на движущуюся цель
Автопилотный блок управляемого снаряда
Управляемый снаряд
Складной аэродинамический орган
Способ настройки рулевого привода летательного аппарата и электромагнитный блок рулевого привода для его осуществления
Способ взведения бортовых систем управляемой ракеты и устройство для его осуществления

