Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА КРЕНА ВРАЩАЮЩЕГОСЯ ПО КРЕНУ ЛЕТАТЕЛЬНОГО АППАРАТА
Вид РИД
Изобретение
Изобретение относится к области точного приборостроения и может быть использовано в системах навигации летательных аппаратов, вращающихся по крену.
Обеспечение возможности измерения угла крена является одной из необходимых задач, решаемых при разработке систем управления летательными аппаратами. Измерение угла крена требуется как для не вращающихся по крену летательных аппаратов (для стабилизации по крену), так и для вращающихся по крену летательных аппаратов (для модуляции сигналов, измеренных в не вращающейся по крену системе координат частотой вращения по крену, а также для формирования команды компенсации силы тяжести).
Обычно угол крена вращающего по крену летательного аппарата измеряется гироскопом крена. Ось вращения ротора гироскопа крена лежит в плоскости симметрии летательного аппарата и перпендикулярна продольной оси летательного аппарата. Датчик угла крена расположен на наружной рамке гироскопа крена.
Для управляемых артиллерийских снарядов вызывает затруднение разработка гироскопов крена, выдерживающих перегрузки, испытываемые снарядом при выстреле. Для артиллерийского снаряда Краснополь используется инерциальный гироскоп (гирокоординатор), ось ротора которого коллинеарна продольной оси снаряда. При этом сигнал гирокоординатора, снимаемый с датчика, расположенного на наружной рамке гирокоординатора, соответствует углу крена снаряда при отсутствии разворота снаряда в горизонтальной плоскости и требуемом рассогласовании гироскопа относительно снаряда в вертикальной плоскости.
Существенно упростить конструкцию летательных аппаратов, вращающихся по крену, позволяет применение анизотропных магниторезистивных датчиков магнитного поля Земли (магнитных датчиков) вместо сложных гироскопических устройств. Применение магнитных датчиков крена позволяет также увеличить точность определения крена при увеличении времени функционирования, существенно уменьшить габариты, вес и стоимость устройств, обеспечивающих определение крена летательных аппаратов.
Известен способ определения крена по показаниям магнитных датчиков, приведенный в статье М.Г. Погорелова, А.П. Шведова, Д.М. Малютина «Система ориентации подвижного объекта по показаниям магнитных датчиков» (журнал «Датчики и системы» №5, 2009 г., стр.51-54), заключающийся в определении углов тангажа и крена по сигналам трехосевого датчика магнитного поля Земли. Угол тангажа 3 в приведенном в статье способе определяется в соответствии с зависимостями:
 ,
,
 ,
,
 ,
,
 ,
,
где:
ψ - заранее известный угол рыскания подвижного объекта, измеренный относительно направления на северный магнитный полюс (угол в горизонтальной плоскости между продольной осью снаряда и направлением на северный магнитный полюс);
 ,
,  - нормированные значения вертикальной и горизонтальной составляющих вектора напряженности магнитного поля Земли, определяемые в соответствии с зависимостями:
- нормированные значения вертикальной и горизонтальной составляющих вектора напряженности магнитного поля Земли, определяемые в соответствии с зависимостями:
 ;
;  ;
;
где
L - вертикальная проекция вектора напряженности магнитного поля;
B - горизонтальная проекции вектора напряженности магнитного поля Земли, измеренная в направлении на северный магнитный полюс;
 - нормированная проекция вектора напряженности магнитного поля Земли на продольную ось летательного аппарата, определяемая в соответствии с зависимостью:
- нормированная проекция вектора напряженности магнитного поля Земли на продольную ось летательного аппарата, определяемая в соответствии с зависимостью:
 ,
,
где X, Y, Z - проекции вектора напряженности магнитного поля Земли на оси, связанной с летательным аппаратом системы координат.
Выбор величины угла тангажа из приведенных четырех значений определяется углом наклона вектора напряженности магнитного поля Земли в районе движения объекта и углом перехода по тангажу υперехода, который вычисляется в соответствии с зависимостями:
 ,
,
 ,
,
 ,
,
 .
.
Выбор υперехода из приведенных четырех значений определяется углом наклона магнитного поля Земли и углом рыскания объекта ψ в соответствии с табл.1.
|
Угол крена при этом вычисляется в соответствии с зависимостями:
 ,
,
 ,
,
 ,
,
 .
.
где  - нормированная проекция вектора напряженности магнитного поля Земли, определяемая в соответствии с зависимостью:
- нормированная проекция вектора напряженности магнитного поля Земли, определяемая в соответствии с зависимостью:
 .
.
Выбор значения угла крена из приведенных четырех значений определяется углом тангажа объекта и значением проекции Y магнитного датчика в соответствии с табл.2.
|
К недостаткам предложенного в статье способа определения крена следует отнести сложность определения угла крена и ограничение на диапазон изменения углов тангажа и крена (±30°).
Известен способ измерения магнитного курса, описанный в патенте на изобретение RU №2130588, МПК G01C 21/08, G01C 21/12, G01C 17/38, 23.04.98 г. «Способ измерения магнитного курса подвижного объекта», принятый авторами за прототип, использующий обработку информации о векторе напряженности магнитного поля Земли и линейного ускорения подвижного объекта, при этом вычисление одного из углов наклона подвижного объекта, необходимого для определения магнитного курса, производят из равенства априорно известной горизонтальной или вертикальной составляющей вектора напряженности магнитного поля Земли с его вычисленным значением по измеренной датчиками информации, а вычисление другого угла наклона производят по измеренной датчиками информации и определенному первому углу наклона.
Определение магнитного курса объекта ψ в указанном способе производится в соответствии с зависимостью:

где Тхс, Tyc, Tzc - проекции вектора напряженности магнитного поля Земли на оси, связанной с летательным аппаратом вращающейся по крену системы координат, измеренные трехосевым датчиком магнитного поля Земли (обозначения соответствуют обозначениям, приведенным в патенте);
ϑ, γ - углы тангажа и крена летательного аппарата;
ψ - магнитный курс объекта (курс объекта, вычисленный относительно направления на северный магнитный полюс).
Угол тангажа ϑ летательного аппарата определяется в соответствии с зависимостями:

где V2=αхс2+αу12-g2 ;
αy1 - проекция ускорения летательного аппарата, определяемая в соответствии с зависимостью: αy1=αус·cosγ-αzc·sinγ;
αxc, αyc, αzc - проекции ускорения летательного аппарата, измеренные акселерометрами, установленными по осям связанной с летательным аппаратом системы координат. Угол крена летательного аппарата определяется в соответствии с зависимостью:

где Z - априорно известная вертикальная проекция магнитного поля Земли; причем определение магнитного курса в соответствии с зависимостью (1) производится по вычисленным в соответствии с зависимостями (2, 3) значениям угла тангажа и вычисленным в соответствии с зависимостью (4) значениям угла крена.
Приведенный в указанном патенте способ позволяет определять крен в ограниченном диапазоне углов (±30°), так как вычисление крена по приведенным зависимостям для вращающего по крену летательного аппарата достаточно затруднено.
К недостаткам предлагаемого алгоритма следует отнести также невозможность определения углов тангажа, рыскания и крена при неравенстве ускорения, развиваемого летательным аппаратом в вертикальной плоскости, ускорению силы тяжести g, т.е. приведенные формулы справедливы для летательных аппаратов, на которых обеспечивается компенсация силы тяжести, а ускорение летательного аппарата в вертикальной плоскости равно нулю.
Задачей предлагаемого изобретения является разработка способа определения крена вращающегося по крену летательного аппарата по сигналам датчиков магнитного поля Земли при произвольном значении ускорения и крена летательного аппарата.
Решение поставленной задачи достигается тем, что в способе определения угла крена вращающегося по крену летательного аппарата, использующем обработку информации о векторах магнитного поля Земли, измеренных трехосевым датчиком магнитного поля Земли в связанной с летательным аппаратом вращающейся по крену системе координат, новым является то, что измеренный датчиком сигнал крена суммируют с сигналом поправки крена, зависящим от угла наклона вектора напряженности магнитного поля Земли, угла магнитного курса летательного аппарата и угла тангажа летательного аппарата, причем углы тангажа и магнитного курса летательного аппарата выбирают таким образом, чтобы функция чувствительности сигнала поправки крена не превышала допустимого значения, определяемого требуемой точностью вычисления угла крена летательного аппарата. Сигнал поправки крена γпопр определяют в соответствии с зависимостью:
 ,
,
где ϑм - угол наклона вектора напряженности магнитного поля Земли в данной местности;
ϑ - угол тангажа летательного аппарата;
ψ - угол магнитного курса летательного аппарата, определяемый как угол в горизонтальной плоскости между продольной осью летательного аппарата и направлением на южный магнитный полюс. Функцию чувствительности сигнала поправки крена определяют в соответствии с зависимостью:
 ,
,
где kϑ и kψ - функции чувствительности ошибки измерения крена летательного аппарата датчиком магнитного поля Земли к ошибкам определения углов тангажа и рыскания летательного аппарата, определяемые в соответствии с зависимостями:
 ;
;
 ;
;
где А=sinϑмcosϑ-cosϑмsinϑcosψ; В=cosϑмsinψ.
В качестве датчиков магнитного поля Земли используют анизотропные магниторезистивные датчики (AMP) магнитного поля Земли, к достоинствам которых следует отнести отсутствие накапливаемой со временем ошибки в определении крена, неограниченное время работы системы, отсутствие ограничений по углам прокачки датчиков, малые габариты и вес.
Для пояснения предлагаемого технического решения введем земную систему координат OXYZ таким образом, чтобы ось X была направлена на магнитный юг, ось Z - на запад, ось Y - вверх. Магнитное поле Земли направлено от южного полюса к северному с наклоном вниз в северном полушарии и вверх в южном полушарии. АМР-датчики измеряют проекции вектора напряженности магнитного поля Земли с противоположным знаком, т.к. в северном полушарии выходной сигнал датчика является положительным, если измерительная ось направлена на юг и вверх, и отрицательным, если измерительная ось направлена на север и вниз. Поэтому далее условно считается, что вектор напряженности магнитного поля Земли направлен с севера на юг с наклоном вверх в северном полушарии и вниз в южном полушарии, тогда его проекция на ось Z равна нулю, а проекции на оси X и Y равны:
Nx=Ncosϑм; Ny=Nsinϑм,
где N - величина напряженности магнитного поля Земли в данной местности;
ϑм - угол наклона вектора напряженности магнитного поля Земли в данной местности, взятый с противоположным знаком (ϑм=0 на магнитном экваторе, ϑм>0 в северном полушарии, ϑм<0 в южном полушарии).
Положение летательного аппарата в связанной с летательным аппаратом системе координат OX1Y1Z1 относительно системы координат OXYZ характеризуется углами:
ψ - угол рыскания (магнитный курс) летательного аппарата, измеренный относительно направления на южный магнитный полюс Земли;
ϑ - угол тангажа летательного аппарата;
γ - угол крена летательного аппарата в связанной с летательным аппаратом системе координат.
Проекции вектора напряженности магнитного поля Земли на оси Y1 и Z1 летательного аппарата равны:
Ny1=Nycosγcosϑ+Nx(sinγsinψ-cosγsinϑcosψ);
Nz1=-Nysinγcosϑ+Nx(cosγsinψ+sinγsinϑcosψ),
где Nx=Ncosϑм; Ny=Nsinϑм.
Величина ϑм считается заранее известной.
Можно показать, что
 ,
,  ,
,
где
 .
.
Таким образом, нормированные сигналы Ny1 и Nz1 представляют собой косинус и синус угла крена, смещенные по фазе на угол, зависящий от углов ϑм, ψ, ϑ. Полученную фазу крена Δγu необходимо ввести в измеренное AMP - датчиком значение крена. Определение Δγu производится по известным значениям угла наклона вектора напряженности магнитного поля Земли, углов тангажа и магнитного курса летательного аппарата. Сигнал поправки крена γпопр необходимо определить в соответствии с зависимостью:
 .
.
Измерение угла крена АМР-датчиком осуществляется следующим образом. Вычисляются величины:
 ;
;
 ;
;
 ;
;
Затем вычисляются:
cosγu=Ccosγпопр-Ssinγпопр;
sinγu=Scosγпопр+Csinγпопр,
где γu - вычисленное по сигналам AMP - датчика значение угла крена летательного аппарата.
Определение крена по сигналам датчика магнитного поля Земли возможно при несовпадении продольной оси летательного аппарата с линиями магнитного поля Земли, так как в противном случае сигналы датчиков, расположенных в экваториальной плоскости, перпендикулярной продольной оси летательного аппарата, не модулированы по крену. Измерение крена по сигналам датчика напряженности магнитного поля Земли производится при допустимом влиянии углов тангажа и магнитного курса летательного аппарата на угол крена, определяемый датчиком магнитного поля Земли.
Степень влияния углов тангажа и магнитного курса летательного аппарата на крен летательного аппарата, измеренный датчиком магнитного поля Земли, определяется в соответствии с зависимостями:
 ,
,  ,
,
где Δγ - ошибка в определении крена датчиком магнитного поля Земли;
Δψ, Δϑ - ошибки определения тангажа и рыскания летательного аппарата, возникающие вследствие несоответствия принятых при определении поправки значений фактическим значениям углов тангажа и магнитного курса летательного аппарата;
 ,
,  - функции чувствительности ошибки изменения угла крена к ошибкам в определении углов тангажа и магнитного курса, равные:
- функции чувствительности ошибки изменения угла крена к ошибкам в определении углов тангажа и магнитного курса, равные:
 ;
;
 ,
,
где
А=sinϑмcosϑ-cosϑмsinϑcosψ;
В=cosϑмsinψ;
kϑ и kψ, - функции чувствительности ошибки измерения крена датчиком магнитного поля к ошибкам определения соответственно углов тангажа и рыскания.
Измерение угла крена датчиком магнитного поля Земли производится при коэффициенте чувствительности k, равном  , не превышающем порогового значения, равного k0, определяемого из условия обеспечения допустимого влияния углов тангажа и магнитного курса летательного аппарата на крен снаряда, т.е. угол крена должен измеряться датчиком магнитного поля Земли, если k<k0. Пороговое значение k0 для рассматриваемых в предлагаемой заявке на изобретение летательных аппаратов, полученное по результатам математического моделирования динамики процессов управления летательным аппаратом, составляет 5. Обеспечить требуемое значение коэффициента чувствительности, не превышающее порогового значения, возможно при выборе траекторий летательного аппарата таким образом, чтобы рассогласование между углом тангажа летательного аппарата и углом наклона вектора напряженности магнитного поля Δ=υ-υм превышало требуемое значение или за счет выбора магнитного курса летательного аппарата.
, не превышающем порогового значения, равного k0, определяемого из условия обеспечения допустимого влияния углов тангажа и магнитного курса летательного аппарата на крен снаряда, т.е. угол крена должен измеряться датчиком магнитного поля Земли, если k<k0. Пороговое значение k0 для рассматриваемых в предлагаемой заявке на изобретение летательных аппаратов, полученное по результатам математического моделирования динамики процессов управления летательным аппаратом, составляет 5. Обеспечить требуемое значение коэффициента чувствительности, не превышающее порогового значения, возможно при выборе траекторий летательного аппарата таким образом, чтобы рассогласование между углом тангажа летательного аппарата и углом наклона вектора напряженности магнитного поля Δ=υ-υм превышало требуемое значение или за счет выбора магнитного курса летательного аппарата.
Предлагаемое техническое решение поясняют графические материалы, приведенные на фиг.1-7.
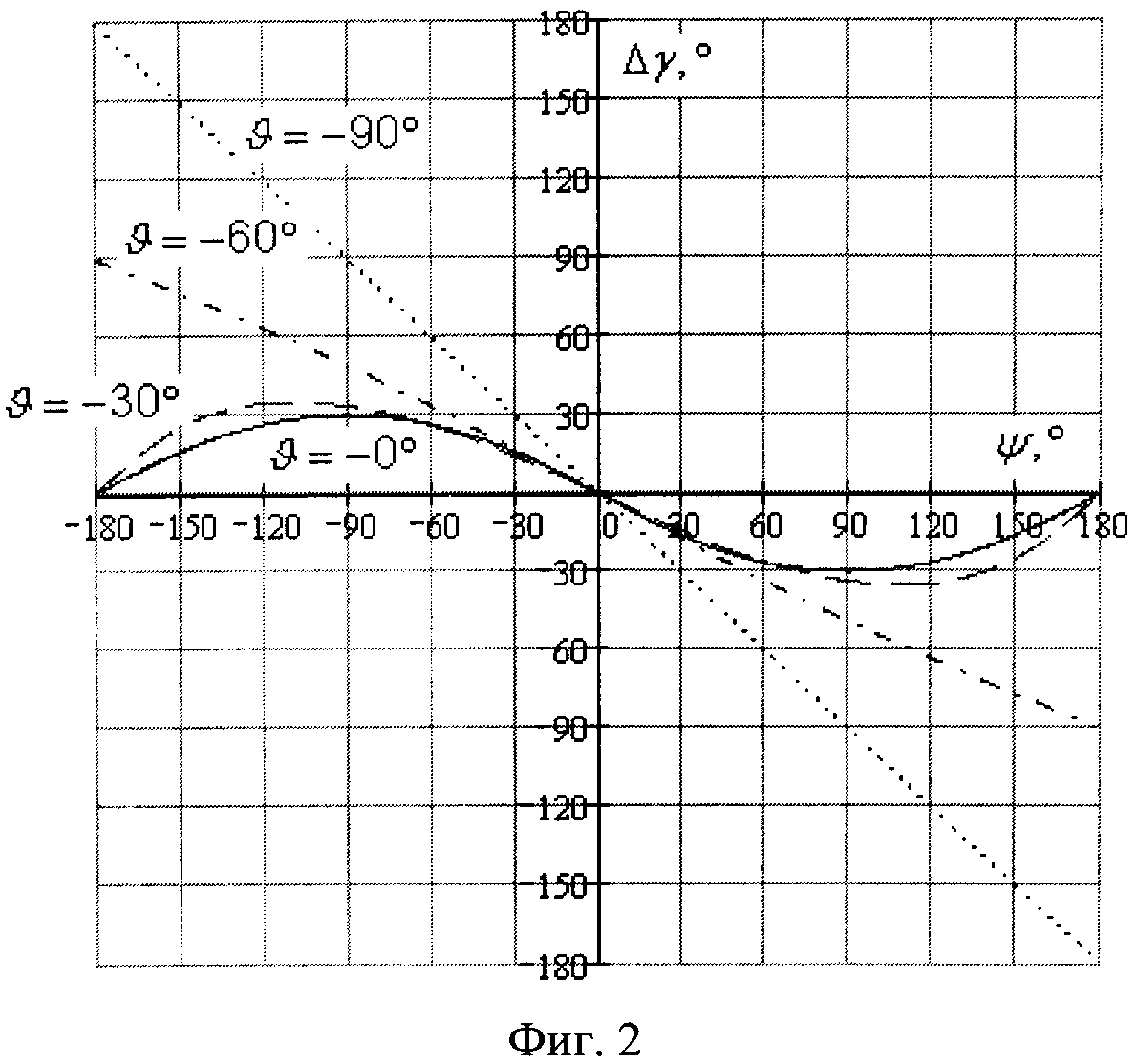
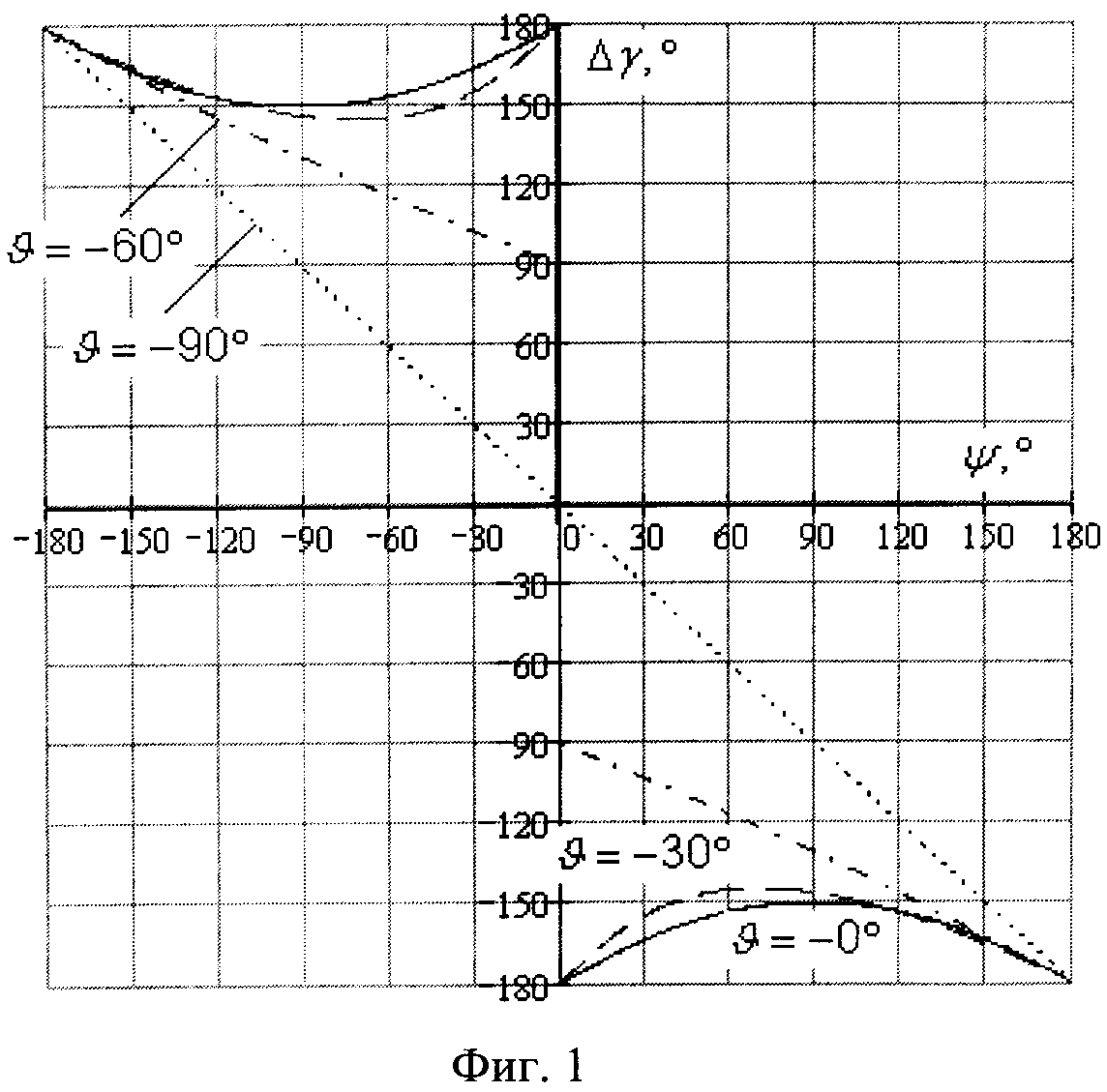
На фиг.1, 2 приведена ошибка измерения крена Δγu в зависимости от угла магнитного курса летательного аппарата ψ, измеренного относительно направления на южный магнитный полюс при углах тангажа летательного аппарата, равных 0, -30°, -60°, -90°, при углах наклона вектора напряженности магнитного поля Земли ϑм, равных 60° (фиг.1) и минус 60° (фиг.2).
На фиг.1, 2 обозначено:
Δγu - ошибка в определении крена датчиком магнитного поля Земли;
ϑ - угол тангажа летательного аппарата;
ψ - магнитный курс летательного аппарата.
Из фиг.1, 2 видно, что ошибка в определении крена летательного аппарата может составлять в зависимости от углов тангажа и магнитного курса летательного аппарата от 0 до 180°.
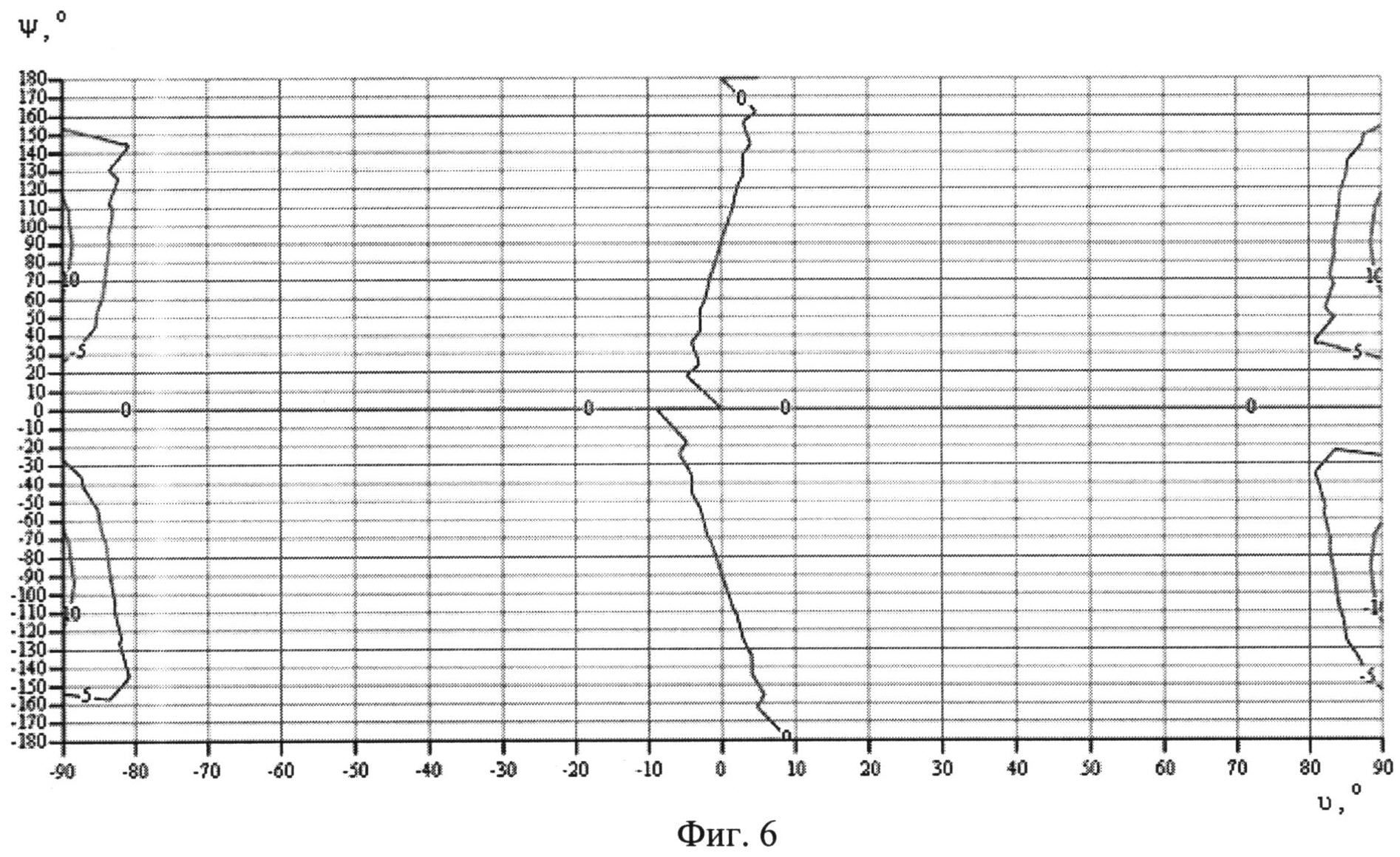
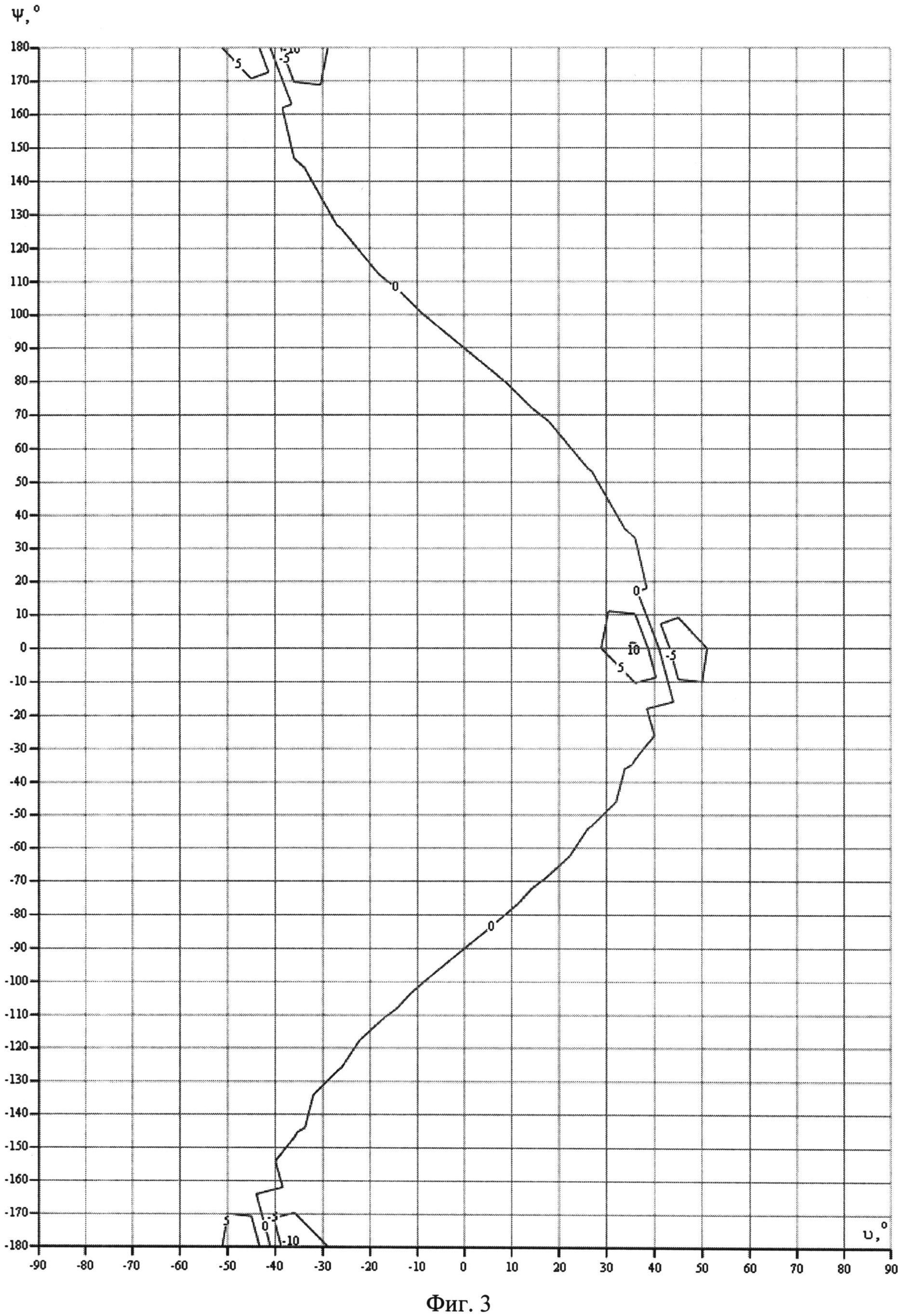
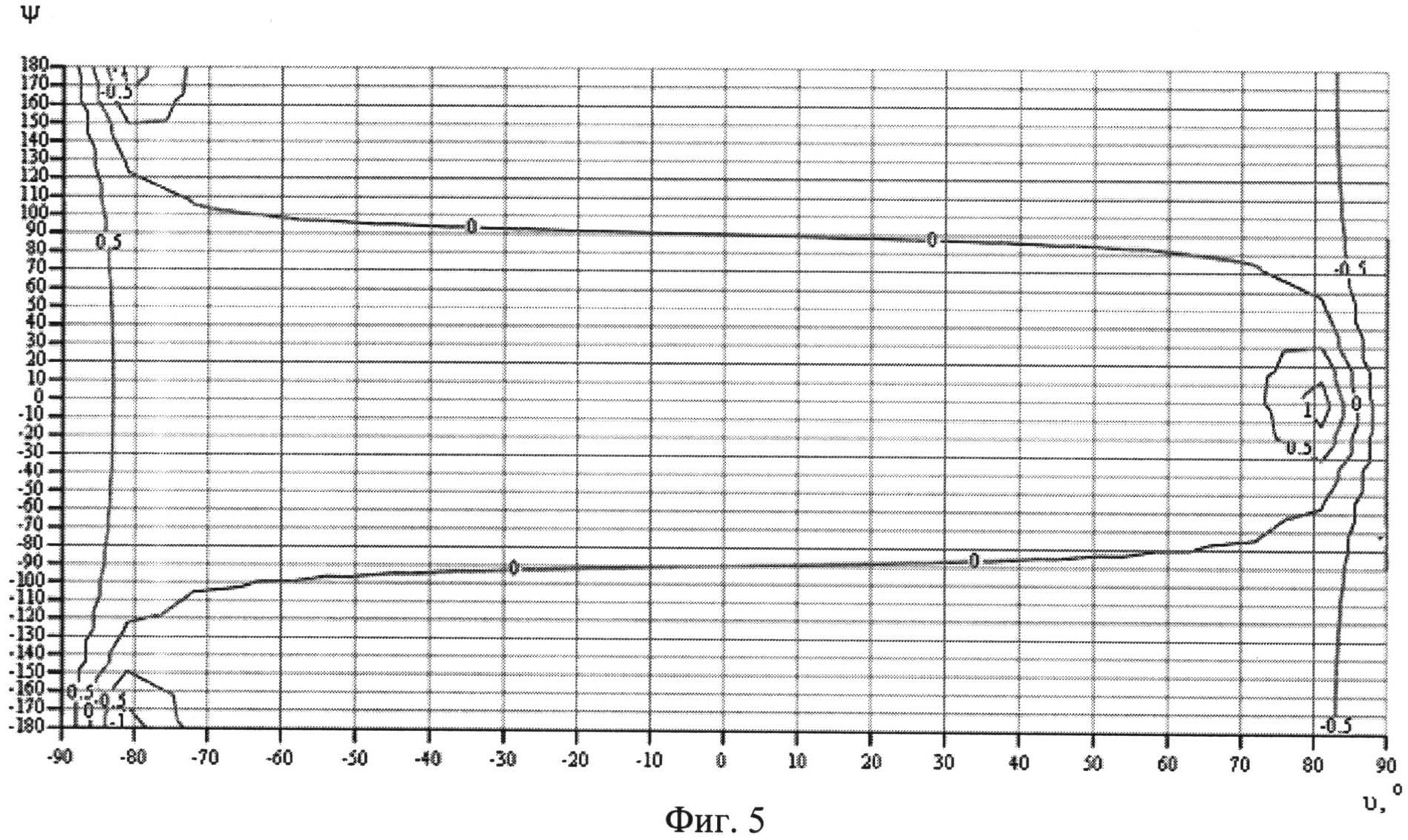
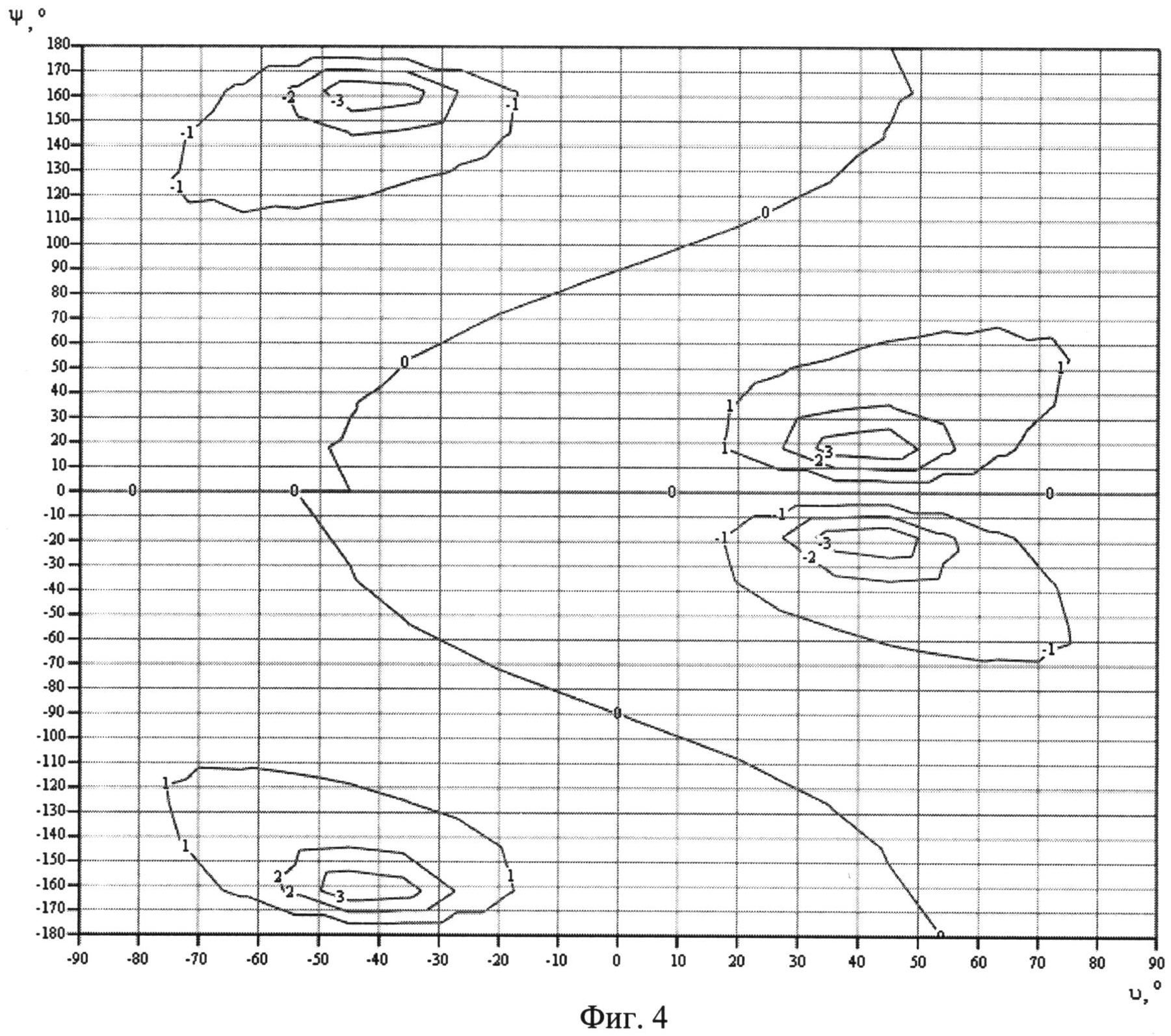
На фиг.3-5 приведены коэффициенты чувствительности kψ (фиг.3, 5) и kϑ (фиг.4, 6) при изменении угла тангажа летательного аппарата в диапазоне ±90°, магнитного курса в диапазоне ±180° при угле наклона вектора напряженности магнитного поля Земли, равном 40° (фиг.3, 4), и угле наклона вектора напряженности магнитного поля Земли, равном 80° (фиг.5, 6). Функции чувствительности представлены в виде линий равного уровня.
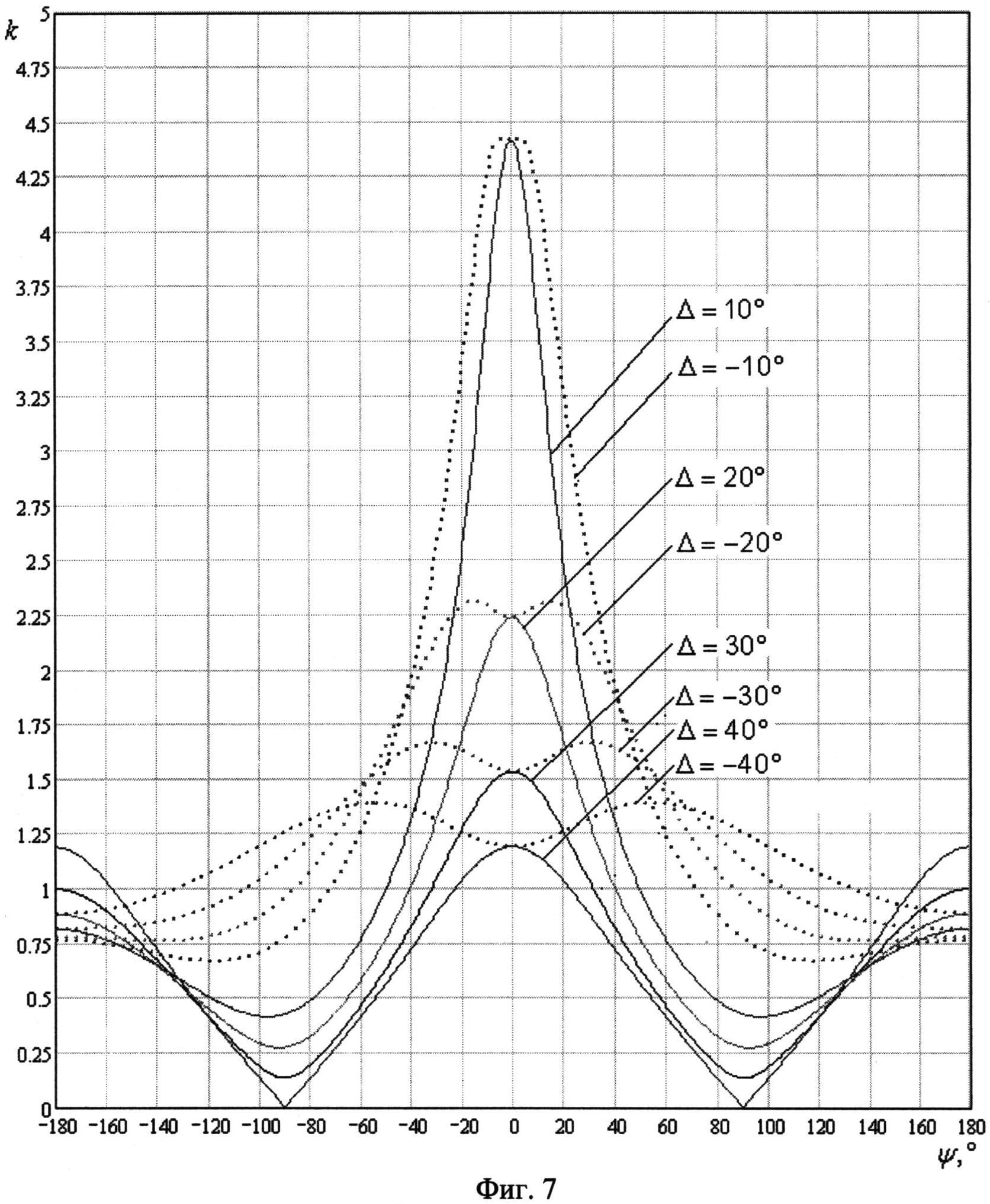
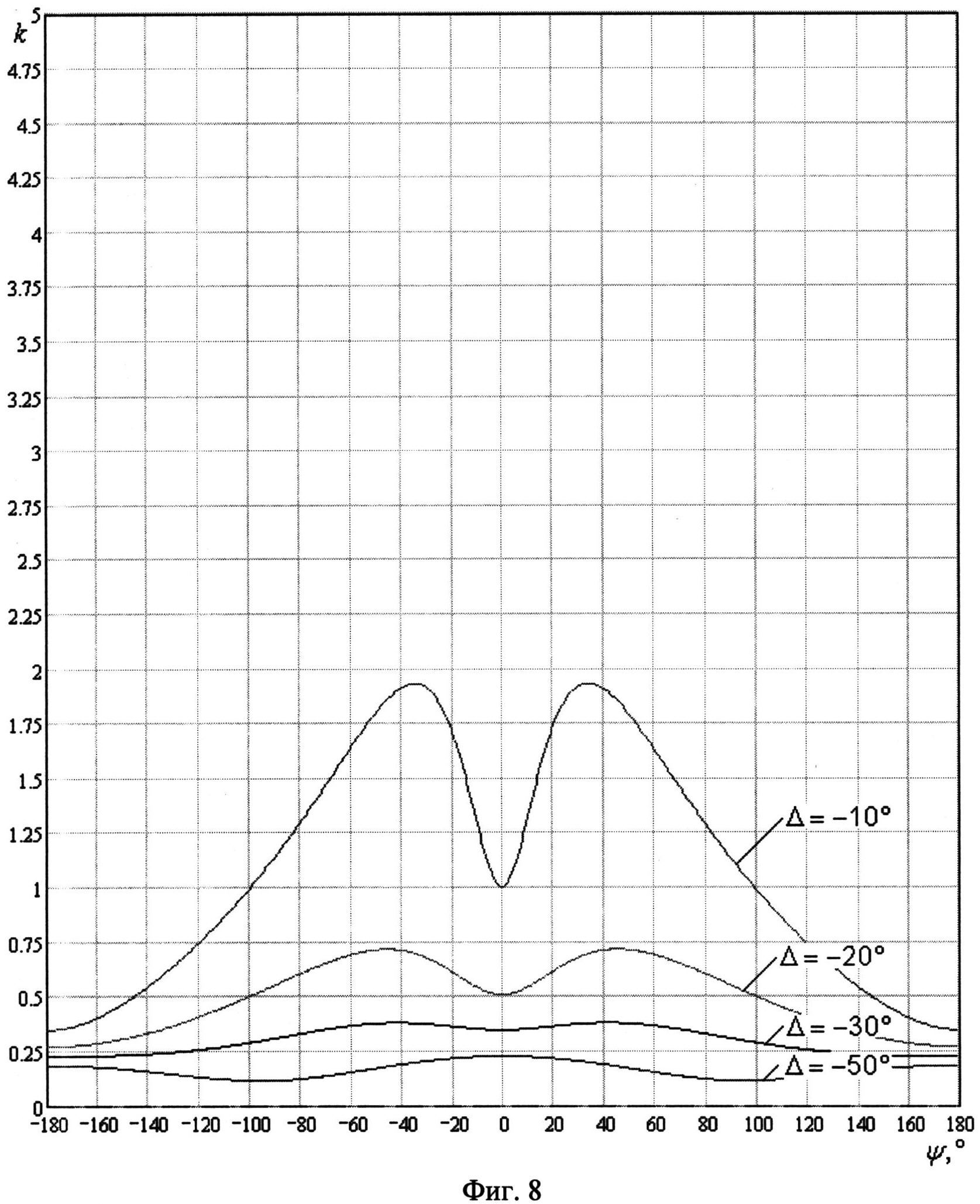
Коэффициент чувствительности k в зависимости от магнитного курса летательного аппарата и рассогласования Δ между углом тангажа летательного аппарата и углом наклона вектора напряженности магнитного поля при углах наклона магнитного поля Земли, равных 40° и 80°, приведены на фиг.7 при ϑм=40° и фиг.8 при ϑм=80°. Из приведенных фигур 7, 8 видно, что коэффициент чувствительности k не превышает требуемого значения, равного 5, при рассогласовании между углом тангажа летательного аппарата и углом наклона магнитного поля Земли, превышающем 10° во всем диапазоне изменения углов магнитного курса летательного аппарата, т.е. при углах наклона магнитного поля Земли, равных 40÷80° (территория СССР) модуль угла тангажа летательного аппарата должен составлять 50÷70° или быть менее 30°. При нулевом угле наклона вектора напряженности магнитного поля Земли модуль угла тангажа летательного аппарата должен превышать 10°. Требуемый угол тангажа летательного аппарата обеспечивается при расчете установок стрельбы.
Таким образом, предлагаемый способ определения крена вращающегося по крену летательного аппарата позволяет определять крен летательного аппарата по сигналам трехосевого датчика магнитного поля Земли при выборе необходимого диапазона углов тангажа и магнитного курса летательного аппарата, определяемых допустимым влиянием углов тангажа и магнитного курса летательного аппарата на угол крена летательного аппарата, причем диапазон измерения угла крена не ограничен.
Пусковая установка
Юстировочный щит
Способ испытаний летательных аппаратов с телеметрической системой регистрации основных параметров и устройство для его осуществления
Способ испытаний артиллерийского снаряда
Бронебойный боеприпас
Патрон для снайперского оружия
Автоматическая пушка
Объединенная двигательная установка ракетного блока
Турбокомпрессор (варианты)
Управляемая пуля в пусковом контейнере
Пусковая установка
Юстировочный щит
Способ испытаний летательных аппаратов с телеметрической системой регистрации основных параметров и устройство для его осуществления
Способ испытаний артиллерийского снаряда
Бронебойный боеприпас
Патрон для снайперского оружия
Автоматическая пушка
Объединенная двигательная установка ракетного блока
Турбокомпрессор (варианты)
Управляемая пуля в пусковом контейнере

