Результат интеллектуальной деятельности: ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА БОЕВОГО ПРИМЕНЕНИЯ
Вид РИД
Изобретение
Изобретение относится к средствам решения задач информационного обмена и управления и может быть использовано в наземных подвижных роботизированных комплексах, оснащенных боевым функциональным модулем.
Известен распределенный информационно-управляющий комплекс подвижных объектов (см. патент RU №223237701, опубл. 10.07.04 г.), принятый за прототип. Распределенный информационно-управляющий комплекс подвижных объектов содержит взаимосоединенные входами-выходами по магистрали информационного обмена систем радиотехнических средств навигации обзорно-прицельные средства, системы опознавания образов, инерциальные датчики и системы, воздушные датчики и системы, индикационно-управляющие устройства, вычислительную систему комплекса, включающую взаимосоединенные по магистрали вычислительного информационного обмена блок формирования параметров состояния, блок комплексной обработки информации, блок ввода-вывода и управления информационным обменом, другой вход-выход которого является входом-выходом вычислительной системы комплекса. Комплекс дополнительно снабжен включенными в состав вычислительной системы комплекса блоком приведения информации, блоком синтеза параметров движения и состояния, блоком расчета параметров движений и деформаций, соединенных между собой и с блоком формирования параметров состояния, с блоком комплексной обработки информации, с блоком ввода-вывода и управления информационным обменом вычислительной системы по магистрали вычислительного информационного обмена.
Недостатками прототипа являются:
- отсутствие возможности адаптированного «поведения» при выполнении боевой задачи в изменяющихся условиях окружающей среды;
- большое количество периферийных устройств, приводящее к усложнению и увеличению количества аппаратных средств;
- отсутствие возможности получать непрерывную многоканальную информацию, необходимую для управления движением и выполнения функциональных задач;
- недостаточное количество базовых технологий работы с комплексом, которые могут быть отработаны операторами в ходе учебно-тренировочного процесса и применены в боевых условиях;
- низкая эффективность использования системы управления в зонах с наличием большого количества препятствующих факторов;
- недостаточная степень автоматизации комплекса, приводящая к высокой степени влияния на результат «человеческого фактора».
Предлагаемым изобретением решается задача по повышению эффективности и надежности роботизированных комплексов вооружений.
Технический результат, получаемый при осуществлении изобретения, заключается в создании информационно-управляющей системы робототехнического комплекса боевого применения, обладающего достаточной пропускной способностью проводных и радиоканалов, связывающих внутренние и внешние устройства между собой и обеспечивающего высокую точность определения навигационных параметров, высокую степень автоматизации и быстродействия процесса обработки информации, возможность реализации адаптированного «поведения» при выполнении боевой задачи в изменяющихся условиях окружающей среды за счет получения непрерывной многоканальной информации для управления движением и выполнения функциональных задач.
Указанный технический результат достигается тем, что в предлагаемой информационно-управляющей системе робототехнического комплекса боевого применения, содержащей магистрали информационного обмена, обзорно-прицельные средства, системы опознавания образов, датчики, принцип действия которых основан на различных физических принципах, индикационно-управляющие устройства, вычислительную систему, новым является то, что информационно-управляющие потоки робототехнического комплекса разделены на распределенные каналы обмена и управления первого уровня: канал обмена и управления по системе связи и передачи данных информационно-вычислительной системы роботизированной транспортной платформы с пунктом дистанционного управления, включающий в себя каналы обмена второго уровня: канал обмена с видеокамерами системы технического зрения, канал обмена с ультразвуковыми датчиками, канал обмена с датчиками и исполнительными механизмами системы управления движением, канал обмена с системой топопривязки и навигации: аппаратурой спутниковой навигации и инерциальной системой ориентации в пространстве, и канал обмена и управления по системе связи и передачи данных вычислительного ядра блока управления, размещенного на пункте дистанционного управления, с вычислительным ядром поворотной платформы, размещенной на роботизированной транспортной платформе и оснащенной системой вооружения, включающий в себя каналы обмена второго уровня: канал обмена вычислительного ядра блока управления с устройством отображения информации и органами управления, канал обмена вычислительного ядра поворотной платформы с гироскопом, канал обмена вычислительного ядра поворотной платформы с исполнительными двигателями вертикального и горизонтального перемещения, канал обмена вычислительного ядра поворотной платформы с электроспуском системы вооружения, канал обмена вычислительного ядра поворотной платформы с блоком наблюдения и целеуказания: лазерным дальномером, тепловизором, видеокамерой широкого поля зрения, видеокамерой узкого поля зрения.
Разделение информационно-управляющих потоков на два распределенных канала обмена и управления первого уровня позволяет;
- осуществлять эффективное управление перемещением роботизированной транспортной платформы к месту боевого применения, маневрирование на местности, выбор огневой позиции;
- осуществлять дистанционное управление средством огневого поражения, размещенном на подвижном объекте;
- вести наблюдение и обнаружение целей в контролируемой зоне;
- вести наведение средства огневого поражения на цели и поражение их в автоматизированном и полуавтоматизированном режимах.
Включение в распределенный канал обмена первого уровня канала обмена второго уровня - канала обмена с видеокамерами системы технического зрения, позволяет:
- осуществлять управления движение роботизированной транспортной платформы вперед;
- осуществлять управления маневрированием, движением задним ходом;
- иметь возможность наблюдения спереди и сзади с достаточным углом обзора;
- распознавать состояние дороги и препятствий;
- осуществлять дистанционное переключение видеокамер.
Включение в распределенный канал обмена первого уровня канала обмена второго уровня - канала обмена с ультразвуковыми датчиками, позволяет:
- обеспечить обнаружение в районе движения роботизированной транспортной платформы наличие препятствий любой конфигуративной сложности;
- предотвратить столкновение роботизированной транспортной платформы с обнаруженными препятствиями;
- повысить степень адаптированного «поведения» при выполнении боевой задачи в изменяющихся условиях окружающей среды.
Включение в распределенный канал обмена первого уровня канала обмена второго уровня - канала обмена с датчиками и исполнительными механизмами системы управления движением, позволяет обеспечить высокую степень управляемости роботизированной транспортной платформы при движении на местности.
Включение в распределенный канал обмена первого уровня канала обмена второго уровня - канала обмена с системой топопривязки и навигации: аппаратурой спутниковой навигации и инерциальной системой ориентации в пространстве, позволяет:
- повысить автономность роботизированной транспортной платформы;
- обеспечить запрограммированное выдвижение платформы в заданную точку и ее возвращение по ранее пройденному маршруту;
- определять координаты ориентиров, расположенных на маршруте движения платформы.
Включение в распределенный канал обмена первого уровня канала обмена второго уровня - канала обмена вычислительного ядра блока управления с устройствами отображения информации, органами управления, позволяет:
- осуществлять управление приводами поворотной платформы, переключение видеокамер, измерение расстояний и стрельбу из системы вооружения;
- осуществлять ввод/вывод данных по внутренним каналам связи;
- осуществлять отображение графической и текстовой видеоинформации.
Включение в распределенный канал обмена первого уровня канала обмена второго уровня - канала обмена вычислительного ядра поворотной платформы с гироскопом, позволяет передавать сигналы на вычислительное ядро во время стабилизации.
Включение в распределенный канал обмена первого уровня канала обмена второго уровня - канала обмена вычислительного ядра поворотной платформы с исполнительными двигателями вертикального и горизонтального перемещения, позволяет управлять перемещением поворотной платформы.
Включение в распределенный канал обмена первого уровня канала обмена второго уровня - канала обмена вычислительного ядра поворотной платформы с электроспуском системы вооружения, позволяет:
- осуществлять управление электроспуском;
- варьировать режим стрельбы.
Включение в распределенный канал обмена первого уровня канала обмена второго уровня - канала обмена вычислительного ядра поворотной платформы с лазерным дальномером позволяет осуществлять измерение дальности до цели.
Включение в распределенный канал обмена первого уровня канала обмена второго уровня - канала обмена вычислительного ядра поворотной платформы с тепловизором позволяет осуществлять наблюдение за местностью в ночных или плохих метеорологических условиях.
Включение в распределенный канал обмена первого уровня канала обмена второго уровня - канала обмена вычислительного ядра поворотной платформы с видеокамерой широкого поля зрения, видеокамерой узкого поля зрения позволяет получать максимально полную видеоинформацию об окружающей местности.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
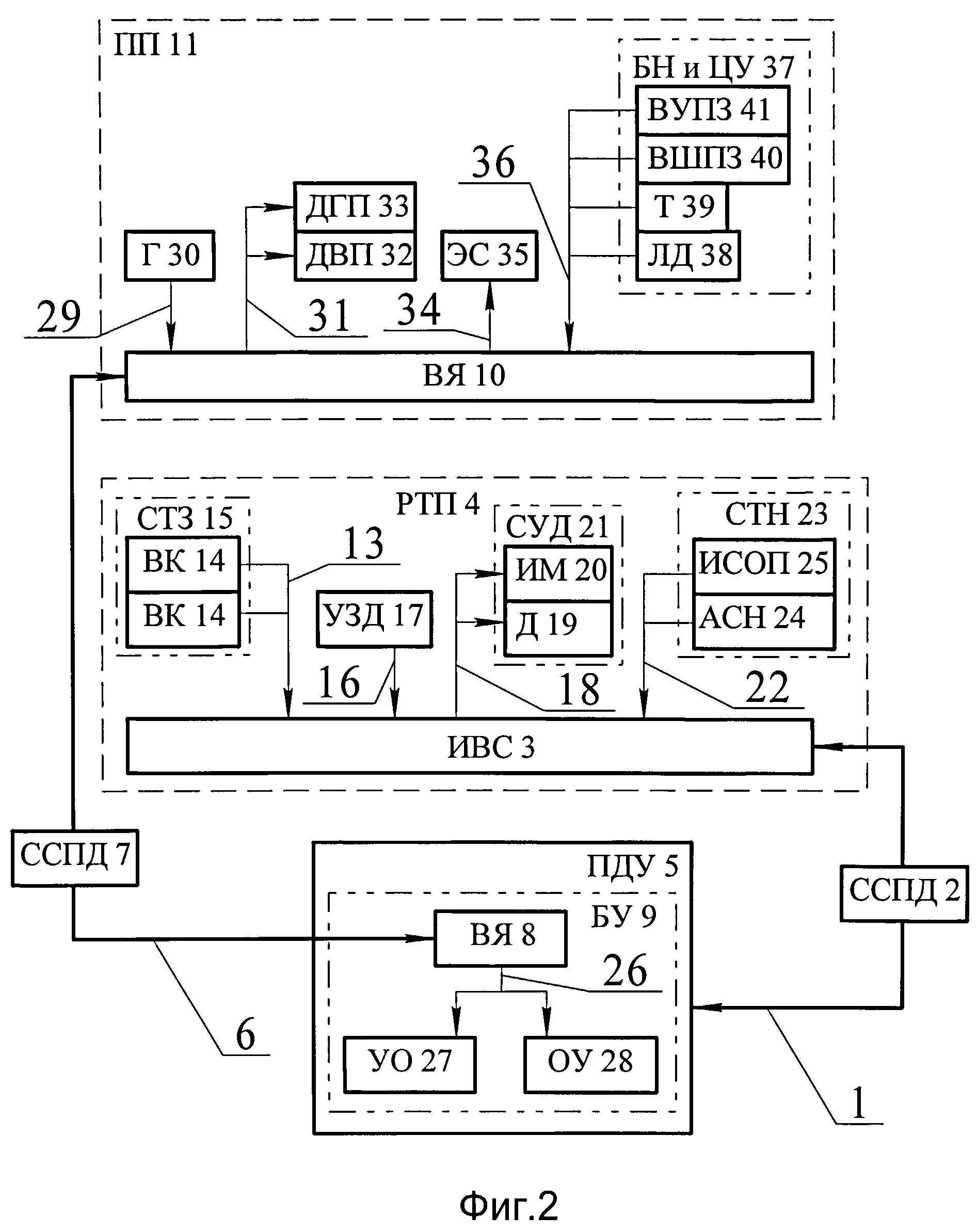
Сущность изобретения поясняется чертежами, где на фиг.1 показан внешний вид робототехнического комплекса боевого применения; на фиг.2 - структурная схема информационно-управляющей системы.
Информационно-управляющая система робототехнического комплекса боевого применения содержит распределенные каналы обмена и управления первого уровня: канал обмена и управления 1 по системе связи и передачи данных (ССПД) 2 информационно-вычислительной системы (ИВС) 3 роботизированной транспортной платформы (РТП) 4 с пунктом дистанционного управления (ПДУ) 5 и канал обмена и управления 6 по системе связи и передачи данных (ССПД) 7 вычислительного ядра (ВЯ) 8 блока управления (БУ) 9, размещенного на ПДУ 5, с вычислительным ядром (ВЯ) 10 поворотной платформы (ПП) 11, размещенной на РТП 4 и оснащенной системой вооружения (СВ) 12. Канал обмена и управления 1 включает в себя каналы обмена второго уровня: канал обмена 13 с видеокамерами (ВК) 14 системы технического зрения (СТЗ) 15, канал обмена 16 с ультразвуковыми датчиками (УЗД) 17, канал обмена 18 с датчиками (Д) 19 и исполнительными механизмами (ИМ) 20 системы управления движением (СУД) 21, канал обмена 22 с системой топопривязки и навигации (СТН) 23: аппаратурой спутниковой навигации (АСН) 24 и инерциальной системой ориентации в пространстве (ИСОП) 25. Канал обмена и управления 6 включает в себя каналы обмена второго уровня: канал обмена 26 ВЯ 8 БУ 9 с устройствами отображения (УО) 27, органами управления (ОУ) 28, канал обмена 29 ВЯ 10 ПП 11 с гироскопом (Г) 30, канал обмена 31 ВЯ 10 ПП 11 с исполнительными двигателями вертикального и горизонтального перемещения (ДВП) 32 и (ДГП) 33, канал обмена 34 ВЯ 10 ПП 11 с электроспуском (ЭС) 35 СВ 12, канал обмена 36 ВЯ 10 ПП 11 с блоком наблюдения и целеуказания (БН и ЦУ) 37: лазерным дальномером (ЛД) 38, тепловизором (Т) 39, видеокамерой широкого поля зрения (ВШПЗ) 40, видеокамерой узкого поля зрения (ВУПЗ) 41. К УО 27 относится ЖК-модуль. К ОУ 28 относятся рукоятка, трекбол, функциональная и цифровая клавиатура, сенсорный экран.
Информационно-управляющая система робототехнического комплекса боевого применения функционирует следующим образом. Распределение основных потоков информационно-управляющих сигналов по проводным и радиоканалам осуществляется по двум каналам обмена и управления первого уровня 1 и 6. Это обусловлено структурным построением робототехнического комплекса боевого применения. Канал обмена и управления 1 предназначен для реализации задач, выполнение которых должна обеспечивать РТП 4, связанных в основном с управляемым перемещением, информационным взаимообменом между РТП 4 и ПДУ 5, решением задач ориентации в пространстве. Данный канал обмена и управления 1 реализуется средствами ССПД 2, достаточными для поддержания необходимой интенсивности информационного обмена. ССПД 2 обеспечивает:
- передачу с ПДУ 5 на РТП 4 команд управления;
- передачу с РТП 4 на ПДУ 5 информации с СТЗ 15, данных о положении и состоянии РТП 4;
- необходимую дальность передачи информации по радиоканалу;
- управление РТП 4 по резервному радиоканалу связи.
Канал обмена и управления 1 включает в себя каналы обмена второго уровня. Канал обмена 13 с ВК 14 СТЗ 15 выполняет функции управления движением и наблюдения. Канал обмена 16 с УЗД 17 в автоматизированном режиме позволяет выполнять распознавание возникающих препятствий на местности с дальнейшим формированием в ИВС 3 команды на объезд препятствия. По каналу обмена 18 с Д 19 и ИМ 20 СУД 21 обеспечивается управление рулевым механизмом, коробкой переключения передач и рычагом газа. По каналу обмена 22 с СТН 23: АСН 24 и ИСОП 25 обеспечиваются:
- начальная привязка РТП 4;
- определение текущих координат, дирекционного угла продольной оси РТП 4;
- отображение маршрута движения РТП 4 на цифровой карте местности в реальном масштабе времени.
Управление аппаратурой систем и подсистем РТП 4 осуществляется посредством ИВС 3 РТП 4, которая обеспечивает:
- обработку информации от ПДУ 5, передачу информации на ПДУ 5;
- дистанционное и полуавтономное управление РТП 4;
- сжатие информации при передаче по каналу ССПД 2.
Канал обмена и управления 6 предназначен для дистанционного управления СВ 12, установленной на ПП 11 РТП 4. Данный канал обмена и управления 6 реализуется средствами ССПД 7, достаточными для поддержания необходимой интенсивности информационного обмена. ССПД 7 обеспечивает:
- передачу с БУ 9 на ПП 11 команд управления;
- передачу с ПП 11 на БУ 5 оптической информации;
- необходимую дальность передачи информации по радиоканалу.
Канал обмена и управления 6 включает в себя каналы обмена второго уровня. Канал обмена 26 ВЯ 8 БУ 9 с УО 27, ОУ 28 предназначен для ввода информации, ее отображения и управления. Канал обмена 29 ВЯ 10 ПП 11 с Г 30 предназначен для передачи сигнала на ВЯ 10 во время стабилизации. По каналу обмена 31 ВЯ 10 ПП 11 с ДВП 32 и ДГП 33 непосредственно передаются сигналы на отработку ПП 11 вертикального и/или горизонтального перемещения ПП 11. По каналу обмена 34 ВЯ 10 ПП 11 с ЭС 35 СВ 12 передаются сигналы на срабатывание ЭС 35 СВ 12. По каналу обмена 36 ВЯ 10 ПП 11 с БН и ЦУ 37: ЛД 38, Т 39, ВШПЗ 40, ВУПЗ 41 передаются сигналы с периферийных устройств ПП 11, отвечающих за наблюдение и целеуказание.
РТП 4 перемещается по маршруту с установленной на ней ПП 11 в дистанционном ручном режиме или полуавтоматическом в условиях любого времени суток и времени года. Управление РТП 4 осуществляется по ССПД 2 с ПДУ 5. Видеоизображение с ВК 14 СТЗ 13 позволяет обеспечивать передвижение платформы вперед и назад с достаточным углом обзора. На ПДУ 5 передаются видеоизображение с ВК 14, а также телеметрическая информации о состоянии РТП 4 (скорость движения, направление движения, углы наклона, текущие координаты, параметры работы двигателя и др.). При использовании СТН 23 движение РТП 4 происходит по траектории, задаваемой оператором путем ввода географических координат узловых точек маршрута в ИВС 3 или по траектории, сохраненной ранее при движении в ручном режиме. В РТП 4 реализован режим автоматического возвращения в исходную точку по пройденному маршруту, а при потере связи - автоматическое возвращение по пройденному маршруту в точку восстановления связи.
После выхода РТП 4 в заданную точку происходит следующее. Проводится наблюдение за местностью с помощью ВШПЗ 40, ВУПЗ 41 и Т 39. При обнаружении цели в контролируемой зоне с помощью ОУ 28 (трекбола) совместить перекрестие на УО 27 БУ 9 с обнаруженной целью. Во время движения РТП 4, на которой установлена ПП 11, для более точного наблюдения за обнаруженной целью в контролируемой зоне включается режим стабилизации. Далее измеряется дальность до цели ЛД 38 после команды с ОУ 28, оператором визуально оценивается дальность до цели для того, чтобы убедится, что значение совпадает с измеренными ЛД 38 значениями. В противном случае производится измерение на цель с новой наводкой или вводится значение дальности вручную. Для поражения цели устанавливается необходимый режим стрельбы после команды с ОУ 28: непрерывный/очередями, длинная/короткая. В связи с инерционностью параметров ЭС 35 СВ 12 количество выстрелов в очереди может отличаться от расчетного на 1-3 выстрела. Для автоматического сопровождения выбранной одиночной движущейся цели при помощи ОУ 28 включается режим сопровождения цели и далее открытие огня.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании информационно-управляющей системы робототехнического комплекса боевого применения, обладающей достаточной пропускной способностью проводных и радиоканалов, связывающих внутренние и внешние устройства между собой и обеспечивающего высокую точность определения навигационных параметров, высокую степень автоматизации и быстродействия процесса обработки информации, возможность реализации адаптированного «поведения» при выполнении боевой задачи в изменяющихся условиях окружающей среды за счет получения непрерывной многоканальной информации для управления движением и выполнения функциональных задач.
Информационно-управляющая система робототехнического комплекса боевого применения, содержащая магистрали информационного обмена, обзорно-прицельные средства, системы опознавания образов, датчики, принцип действия которых основан на различных физических принципах, индикационно-управляющие устройства, вычислительную систему, отличающаяся тем, что информационно-управляющие потоки робототехнического комплекса разделены на распределенные каналы обмена и управления первого уровня: канал обмена и управления по системе связи и передачи данных информационно-вычислительной системы роботизированной транспортной платформы с пунктом дистанционного управления, включающий в себя каналы обмена второго уровня: канал обмена с видеокамерами системы технического зрения, канал обмена с ультразвуковыми датчиками, канал обмена с датчиками и исполнительными механизмами системы управления движением, канал обмена с системой топопривязки и навигации: аппаратурой спутниковой навигации и инерциальной системой ориентации в пространстве, и канал обмена и управления по системе связи и передачи данных вычислительного ядра блока управления, размещенного на пункте дистанционного управления, с вычислительным ядром поворотной платформы, размещенной на роботизированной транспортной платформе и оснащенной системой вооружения, включающий в себя каналы обмена второго уровня: канал обмена вычислительного ядра блока управления с устройством отображения информации и органами управления, канал обмена вычислительного ядра поворотной платформы с гироскопом, канал обмена вычислительного ядра поворотной платформы с исполнительными двигателями вертикального и горизонтального перемещения, канал обмена вычислительного ядра поворотной платформы с электроспуском системы вооружения, канал обмена вычислительного ядра поворотной платформы с блоком наблюдения и целеуказания: лазерным дальномером, тепловизором, видеокамерой широкого поля зрения, видеокамерой узкого поля зрения.
Способ стабилизации гальванического хромового покрытия стволов автоматического стрелкового оружия и шахтная печь сопротивления для его реализации
Способ формирования режима работы с цифровыми картами местности
Способ контроля функционирования топопривязчика
Программно-аппаратный комплекс
Кулачковый механизм с кинематическим замыканием и способ местной закалки роликового паза кулачка
Способ определения угла поворота мобильного робототехнического комплекса при преодолении препятствий
Механизм образования пакета для брикета правильной геометрической формы
Поворотная пусковая установка
Пулемет
Способ создания топогеодезических сетей для подготовки боевых действий ракетных войск, артиллерии и противовоздушной обороны сухопутных войск
Способ стабилизации гальванического хромового покрытия стволов автоматического стрелкового оружия и шахтная печь сопротивления для его реализации
Способ формирования режима работы с цифровыми картами местности
Способ контроля функционирования топопривязчика
Программно-аппаратный комплекс
Кулачковый механизм с кинематическим замыканием и способ местной закалки роликового паза кулачка
Способ определения угла поворота мобильного робототехнического комплекса при преодолении препятствий
Механизм образования пакета для брикета правильной геометрической формы
Поворотная пусковая установка
Пулемет
Способ создания топогеодезических сетей для подготовки боевых действий ракетных войск, артиллерии и противовоздушной обороны сухопутных войск

