Результат интеллектуальной деятельности: УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНОЙ ФРОНТАЛЬНОГО ДЕЙСТВИЯ ДЛЯ ТОЧНОГО ПОЛИВА
Вид РИД
Изобретение
Изобретение относится к сельскому хозяйству и направлено на повышение качества полива и более эффективное использование энергии и поливной воды путем согласованного регулирования скорости движения опорных тележек и вносимой воды в соответствии поливной нормой при точном поливе.
Известна многоопорная дождевальная машина (А.С. №1335201, A01G 25/09), включающая дождеватели, установленные на трубопроводе машины, опорные тележки с электроприводом и концевыми выключателями, соединенными с блоками стабилизации машины в линию, машина снабжена включенными между трубопроводом и дождевателями электроуправляемыми клапанами, разделенными на группы по числу концевых выключателей и подключенными параллельно последним к блоку стабилизации машины в линию, причем электруправляемые клапаны в каждой группе установлены на трубопроводе машины симметрично опорным тележкам машины.
Недостатками данного устройства является следующее.
Полив через дождеватели (дождевальные насадки), прилегающих к опорной тележке производится только при движении опорной тележки.
При постоянном коэффициенте передачи электропривода опорных тележек и постоянном значении напряжения питания электроприводов опорных тележек слой дождя за один проход будет постоянным и не зависит от заданного значения скорости движения. Отсутствует возможность регулирования вносимой нормы полива дождевальной машиной.
В качестве энергетической установки используется дизельный двигатель внутреннего сгорания (ЯМ3-238НД), который имеет низкий энергетический КПД (0,35-0,38) и загрязняет окружающую среду выбросами отработавших газов. В поливной сезон расход дизельного топлива за сутки составляет до 500 кг.
После выполнения энерготехнологического процесса полива нет возможности определить площадь полива за время работы машины, например, за рабочую смену, фактическую норму полива и расход дизельного топлива и, следовательно, энергоемкость полива единицы площади полива.
Не регулируется напор в трубопроводе, например, при остановках нескольких опорных тележек электроуправляемые клапаны срабатывают, что приводит к прекращению расхода оросительной воды через дождеватели и изменению общего расхода и напора оросительной воды в трубопроводе. Это приводит к значительному изменению напора на входах работающих дождевателей, что приводит к изменению структуры дождевого облака (диаметр капель изменится). Использование данного устройства является не энергоэффективным - происходит необоснованный расход дизельного топлива.
Известно устройство автоматизированного управления многоопорной фронтальной дождевальной машиной (А.С. №1391544, A01G 25/09), включающее установленные на тележках с электроприводом правого и левого крыльев машины, блок синхронизации движения по курсу с направляющим тросом и блоком управления скоростью движения машины, установленными на входах в трубопроводы правого и левого крыльев задвижками с электроприводом, с шарнирно укрепленным коммутатором с опорным роликом и датчиками впитываемости почвы и задатчиком норм полива орошаемых правым и левым крыльями машины участков поля.
Недостатком данного устройства является следующее.
Ненадежное контактное соединение полевого и приемного коммутатора и подача электрического питания на датчики состояния впитываемости почвы.
Анализатор определяет среднее значение показаний всех датчиков впитываемости под каждым из крыльев машины. Осреднение показаний датчиков приведет к неточному заданию нормы полива под соответствующим крылом.
Регулирование расхода оросительной воды при помощи дросселирования гидрозадвижки ухудшает качество дождевого облака. Дождевальные насадки, которые равномерно размещены по всей длине трубопровода, должны иметь на входе постоянный напор. При снижении напора оросительной воды в трубопроводе качество дождевого облака ухудшается по причине укрупнения диаметров капель, что отрицательно влияет на физико-механические характеристики почвы (происходит утрамбовывание почвы ударами крупных капель дождя).
Отсутствует оперативный контроль и управление скоростью движения машины и, следовательно, нормой полива, расходом оросительной воды, определение пройденного пути машиной, длительностью времени работы машины.
Отсутствует возможность после прохода машины по орошаемому участку поля определять расход топлива, значение слоя дождя (фактическое значение нормы полива), площадь полива и суммарное значение времени работы машины и суммарное значение внесенных фактических норм полива (оросительная норма) и, следовательно, энергоемкость полива единицы площади.
Не регулируется напор в трубопроводе, например, при остановках нескольких опорных тележек электроуправляемые клапаны срабатывают, что приводит к прекращению расхода оросительной воды через дождеватели и изменению общего расхода и напора оросительной воды в трубопроводе. Это приводит к значительному изменению напора на входах работающих дождевателей, что приводит к изменению структуры дождевого облака (диаметр капель изменится). Использование данного устройства является не энергоэффективным - КПД двигателя внутреннего сграния составляет 0,35. А также происходит загрязнение окружающей среды путем выбросов в атмосферу продуктов сгорания.
Наиболее близким по сущности является устройство автоматизированного управления многоопорной дождевальной машиной фронтального действия, включающее установленные на тележках с электроприводом трубопроводы правого и левого крыльев машины блок синхронизации движения по курсу с направляющим тросом и блок управления скоростью движения машины, вдоль оросительного канала установлена на стойках контактная сеть, взаимодействующая с токосъемником, который через телескопический механизм закреплен на тележке, движущейся по противоположной стороне оросительного канала, при этом выход токосъемника соединен с входом щита управления, выход которого соединен с входом счетчика электрической энергии, выходы которого соединены с входами контактора, микропроцессорного блока управления и частотного преобразователя, входы микропроцессорного блока управления соединены с таймером, системой стабилизации курса, системой синхронизации тележек в линию, датчиками пути, задатчиком нормы полива, задатчиком длины участка полива, расходомером и манометром, установленным на трубопроводе, а выходы микропроцессорного блока управления соединены с электрогидрозадвижкой, частотным преобразователем, контактором, приборами синхронизации тележек в линию и приборами стабилизации курса левого и правого крыла, через вакуум-насос с входом насоса, выход которого через электрогидрозадвижку и расходомер соединен с трубопроводом, при этом микропроцессорный блок управления соединен с входом-выходом интерфейсного устройства, сигнал с выхода частотного преобразователя подается на электропривод левого и правого крыла машины, а выход контактора соединен через электродвигатель с входом насоса (Заявка на изобретение Российской Федерации №2011114191/13 (022957). A01G 25/09.).
Недостатками данного устройства является следующее.
Отсутствует возможность оперативного контроля качества выполнения энерготехнологического процесса полива непосредственно при поливе.
Оперативно в энерготехнологическом процессе полива не определяются показатели энергоэффективности полива.
Нет возможности обеспечения различных значений норм полива на различных по размеру участках полива (под каждым из крыльев машины, участков посева различных культур).
Нет возможности визуализации оперативных показателей энергоэффективности полива.
Отсутствует возможность измерения влажности почвы орошаемого участка поля, как перед поливом, так и после полива.
Задача изобретения - повышение качества полива, снижение энергоемкости процесса и повышение экологичности энерготехнологического процесса точного полива и экономии оросительной воды.
Поставленная задача решается за счет того, что устройство автоматизированного управления многоопорной дождевальной машиной фронтального действия для точного полива, включающее установленные на тележках с электроприводом трубопроводы правого и левого крыльев машины блок синхронизации движения по курсу с направляющим тросом и блок управления скоростью движения машины, вдоль оросительного канала установлена на стойках контактная сеть, взаимодействующая с токосъемником, который через телескопический механизм закреплен на тележке, движущейся по противоположной стороне оросительного канала, при этом выход токосъемника соединен с входом щита управления, выход которого соединен с входом счетчика электрической энергии, выходы которого соединены с входами микропроцессорного блока управления и частотного преобразователя, входы микропроцессорного блока управления соединены с таймером, системой стабилизации курса, системой синхронизации тележек в линию, датчиками пути, задатчиком нормы полива, задатчиком длины участка полива, расходомером и манометром, установленным на трубопроводе, а выходы микропроцессорного блока управления соединены с электрогидрозадвижкой, частотным преобразователем, контактором, приборами синхронизации тележек в линию и приборами стабилизации курса левого и правого крыла, через вакуум-насос с входом насоса, выход которого через электрогидрозадвижку и расходомер соединен с трубопроводом, при этом микропроцессорный блок управления соединен с входом-выходом интерфейсного устройства, сигнал с выхода частотного преобразователя подается на электропривод левого и правого крыла машины, а выход контактора соединен через электродвигатель с входом насоса, сигнал, полученный с измерителей влажности, установленных на орошаемом участке поля, поступает на систему управления поливом через GLONASS-спутник, сигнал с системы управления поливом через GLONASS-спутник передается на вход-выход GLONASS-приемника, выход которого через блок анализа сигналов соединен с микропроцессорным блоком управления, выход последнего соединен с GLONASS-приемником, а вход-выход микропроцессорного блока управления электрически соединен с сенсорным экраном, а выход частотного преобразователя соединен с входом контактора, при этом выход блока анализа сигналов соединен с входами блока управления поливом, выходы которых на крайних ведущих опорных тележках с входом прибора стабилизации курса, а на промежуточных опорных тележках с входом прибора синхронизации тележек в линию, как правого, так и левого крыльев машины.
Новые существенные признаки
1. Сигнал, полученный с измерителей влажности, установленных на орошаемом участке поля, поступает на систему управления поливом через GLONASS-спутник.
2. Сигнал с системы управления поливом через GLONASS-спутник передается на вход-выход GLONASS-приемника, выход которого через блок анализа сигналов соединен с микропроцессорным блоком управления.
3. Выход микропроцессорного блока управления соединен с GLONASS-приемником.
4. Вход-выход микропроцессорного блока управления электрически соединен с сенсорным экраном.
5. Выход частотного преобразователя соединен с входом контактора.
6. Выход блока анализа сигналов соединен с входами блока управления поливом, выходы которых на крайних ведущих опорных тележках с входом прибора стабилизации курса, а на промежуточных опорных тележках с входом прибора синхронизации тележек в линию как правого, так и левого крыльев машины.
Перечисленные новые существенные признаки в совокупности с известными необходимы и достаточны во всех случаях, на которые распространяется испрашиваемый объем правовой охраны.
Технический результат
1. Сигнал, полученный с измерителей влажности, установленных на орошаемом участке поля, поступает на систему управления поливом через GLONASS-спутник. На орошаемом участке поля в соответствующих квадратах, которые расположены под группой дождевальных насадок, расставляются измерители влажности. Измерители влажности измеряют влажность почвы. При запросе из системы управления поливом через GLONASS-спутник активируются измерители влажности и передают результат измерений через GLONASS-спутник, который поступает в систему управления поливом. Результаты измерения могут быть получены как перед поливом, так и после полива орошаемого участка поля по запросу, например, агронома или в автоматическом режиме периодически.
2. Сигнал с системы управления поливом через GLONASS-спутник передается на вход-выход GLONASS-приемника, выход которого через блок анализа сигналов соединен с микропроцессорным блоком управления. Сигнал, полученный от измерителей влажности по команде оператора передается через GLONASS-спутник на вход-выход GLONASS-приемника, который установлен на машине, выход которого через блок анализа сигналов соединен с микропроцессорным блоком управления. Блок анализа сигналов после обработки полученной информации вырабатывает команду, которая поступает на микропроцессорный блок управления, где формируется карта полива поля с указанием норм полива в соответсвующих квадратах.
3. Выход микропроцессорного блока управления соединен с GLONASS-приемником. Полученная карта полива поля с выхода микропроцессорного блока управления подается на вход GLONASS-приемника, которая поступает через GLONASS-спутник на систему управления поливом и может быть архивирована.
4. Вход-выход микропроцессорного блока управления электрически соединен с сенсорным экраном. На экране сенсорного экрана отображается (визуализируется) карта полива поля для ознакомления агронома.
5. Выход частотного преобразователя соединен с входом контактора. Частотный преобразователь изменяет значения напряжения и частоту, которое поступает через контактор на электродвигатель насоса с целью стабилизации давления (напора) в трубопроводе с учетом сигналов от манометра и расходомера.
6. Выход блока анализа сигналов соединен с входами блока управления поливом, выходы которых на крайних ведущих опорных тележках с входом прибора стабилизации курса, а на промежуточных опорных тележках с входом прибора синхронизации тележек в линию, как правого, так и левого крыльев машины. Сигнал с блока анализа сигналов поступает на входы блока управления поливом, выходы которых на крайних ведущих опорных тележках с входом прибора стабилизации курса, а на промежуточных опорных тележках с входом прибора синхронизации тележек в линию. При получении команды на движение от приборов стабилизации курса и прибора синхронизации тележек в линию опорные тележки начинают двигаться со скоростью, определенной в зависимости от максимального значения нормы полива на орошаемом участке поля по результатам измерения влажности. Скважность сигнала на работы группы дождевальных насадок вырабатывается в блоке управления поливом.
Начиная с конца XX века в практике сельского хозяйства развитых стран применяются информационно-насыщенные методы, технологии и техника для повышения энергоэффективности производства.
В растениеводстве данная доктрина реализуется в виде концепции точного земледелия. Традиционные технологии внесения удобрений в усредненной дозе для всего участка поля без учета внутрипольной вариабельности параметров почвенного плодородия не обеспечивают заданной окупаемости удобрений, реализации генетического потенциала сельскохозяйственных культур.
Точное земледелие (анг. Precision Agriculture) является новой популярной концепцией производства. Точное земледелие можно определить как целостную систему, предназначенную для оптимизации сельскохозяйственного производства за счет применения информации по культурам, передовых технологий и методов.
Под общее название «Precision Agriculture» входит следующее:
- организация производства на уровне элементарного участка (удобрение, азотные подкормки, обработка почвы, полив, посев, использование удобрений, гербицидов и регуляторов роста);
- автоматизация процессов на производстве (автоматические системы параллельного вождения, контроль за техническим состоянием техники и др.);
- протоколирование, контроль, ведение учета (обмер полей, учет урожайности, учет рабочего времени и энергоресурсов).
Комплексный подход к точному земледелию начинается с планирования сельскохозяйственного производства и включает обработку, посев, полив, применение химикатов, уборку и послеуборочную обработку почвы. При работе по данному методу производства необходимо рассматривать сельскохозяйственные поля не как одно целое, а разделять на участки и учитывать разницу почв и разнородности урожайности в пределах одного поля.
Преимущество точного земледелия заключается в следующем:
- земледелец экономит количество вносимого удобрения там, где достаточно питательных элементов в почве, и повышает дозу там, где есть потребность в них. При этом будет наблюдаться увеличение урожая при минимальном расходе минеральных удобрений;
- земледелец экономит количество вносимой оросительной воды там, где влажность почвы достаточна, и повышает норму полива там, где есть потребность в них. При этом будет наблюдаться увеличение урожая при минимальном расходе оросительной воды;
- экономия энергоресурсов на внесение в орошаемый участок поля оросительной воды и дизельного топлива;
- точный полив дождеванием становится энергоресурсосберегающим;
- не будет образования участков переполива и недополива, что приводит к заболачиванию островков поля и недополучения урожая как от переполива, так и от недополива, улучшится состояние окружающей среды, защита почвы и грунтовых вод.
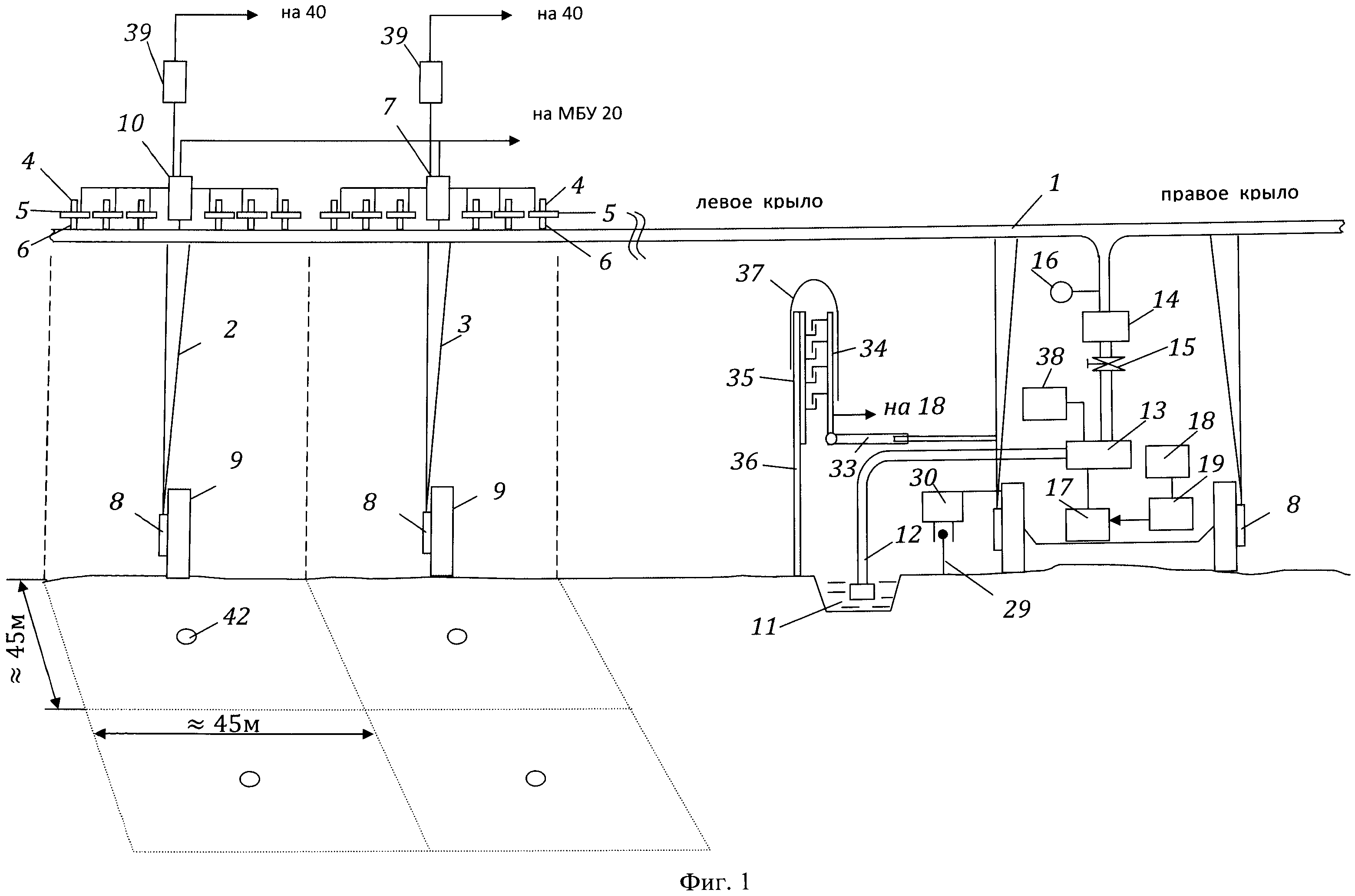
На Фиг.1 приведена функциональная схема предлагаемого устройства автоматизированного управления многоопорной дождевальной машиной фронтального действия для точного полива,
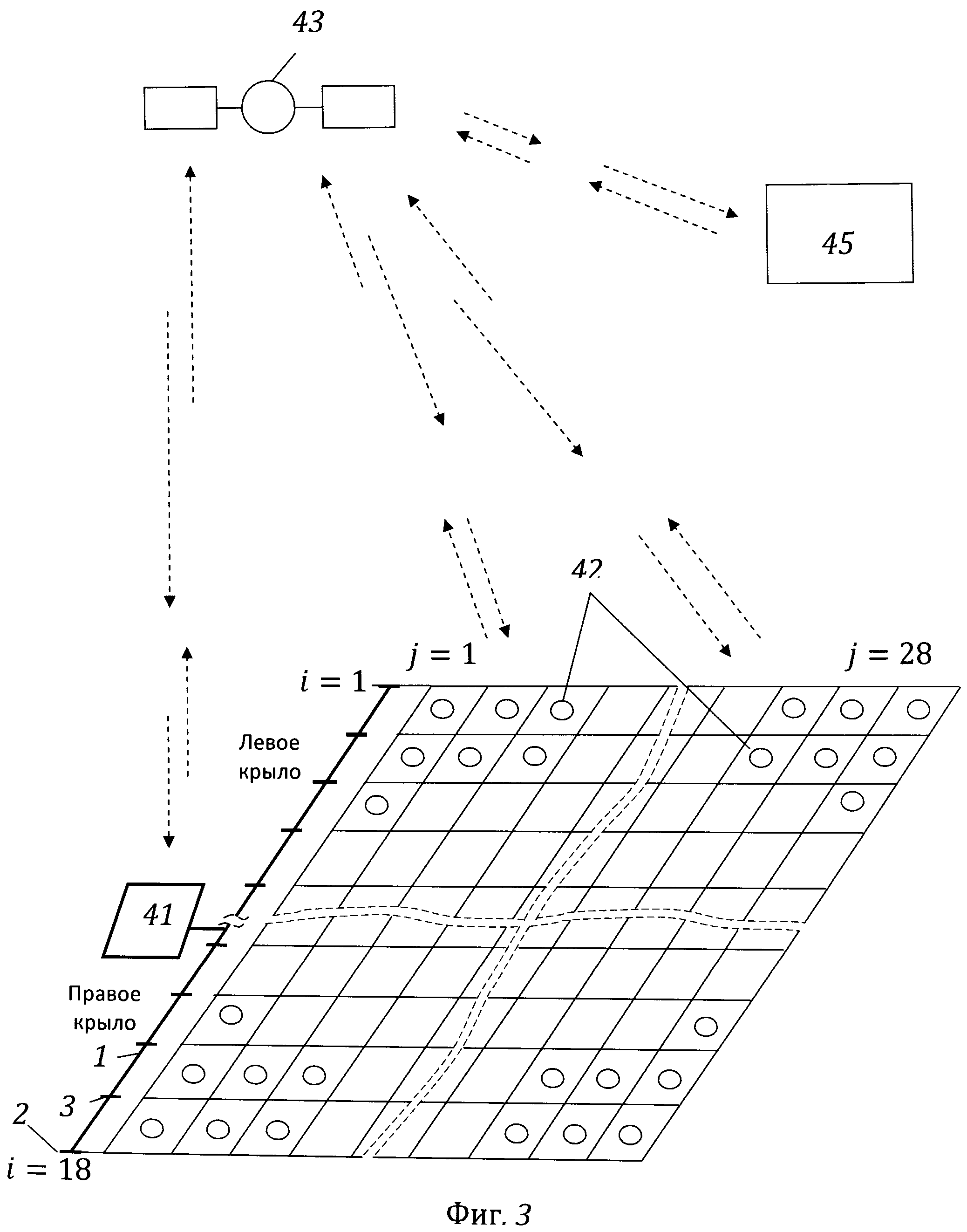
На Фиг.2 приведена структурная схема предлагаемого устройства, Фиг.3 приведена функциональная схема передачи сигналов от измерителей влажности через спутниковую связь на дождевальную машину.
Устройство автоматизированного управления многоопорной дождевальной машиной фронтального действия для точного полива состоит из трубопровода 1 (длина 787 м), который установлен на двух крайних ведущих опорных тележках 2 и промежуточных опорных тележках 3 (например, 16 шт.), которые имеют A-образную форму. Дождевальные насадки 4 через электроуправляемые клапаны 5 и патрубки 6 установлены равномерно по длине трубопровода 1. Электроуправляемые клапаны 5 предназначены для перекрытия воды, поступающей на дождевальные насадки 4 из трубопровода 1 через патрубки 6. Для управления движением на промежуточных опорных тележках 3 установлены приборы синхронизации тележек в линию (ПСЛ) 7, которые вырабатывают команды на движение электропривода 8, который механически связан с колесом 9. При выбеге относительно соседних больше допустимого промежуточные опорные тележки 3 по команде ПСЛ 7 останавливаются, а при отставании - начинают двигаться. Группа электроуправляемых клапанов 5 дождевальных насадок 4, которые прилегают с двух сторон к промежуточным опорным тележкам 3, соединены к соответствующим ПСЛ 7 и, когда ПСЛ 7 вырабатывает команду на остановку промежуточных опорных тележек 3, электроуправляемые клапаны 5 включаются и перекрывают воду, которая поступает через дождевальные насадки 4 в поле, а при выработке команды на движение - электроуправляемые клапаны 5 отключаются и вода поступает на дождевальные насадки 4.
На двух крайних ведущих опорных тележках 2 установлены приборы стабилизации курса (ПСК) 10, которые вырабатывают команду на движение крайних ведущих опорных тележек 2 в зависимости от отклонения машины от курса движения (боковое отклонение). Группа электроуправляемых клапанов 5 дождевальных насадок 4, которые прилегают с двух сторон к крайним ведущим опорным тележкам 2, соединены к соответствующим ПСК 10 и, когда ПСК 10 вырабатывает команду на остановку крайних ведущих опорных тележек 2, электроуправляемые клапаны 5, подключенные к соответствующим ПСК 10, включаются и перекрывают воду, которая поступает в поле через дождевальные насадки 4, а при выработке команды на движение - электроуправляемые клапаны 5 отключаются и вода поступает на дождевальные насадки 4. Алгоритмы движения крайних ведущих опорных тележек 2 могут быть различными, например, при коррекции крайние ведущие опорные тележки 2: останавливаются (при этом полив через дождевальные насадки 4 прекращается), замедляют скорость движения (полив осуществляется через часть дождевальных насадок 4) или корректируемая крайняя ведущая опорная тележка 2 замедляет скорость движения, а другая крайняя ведущая опорная тележка 2 увеличивает скорость движения. Алгоритм работы электроуправляемых клапанов 5 и расход через дождевальные насадки 4, которые прилегают к крайним ведущим опорным тележкам 2, также могут быть различными (например, расход через дождевальные насадки 4, которые прилегают к крайним ведущим опорным тележкам должен быть больше, чем через дождевальные насадки 4, которые прилегают к промежуточным опорным тележкам 3 (на 20-25%).
Крайние ведущие опорные тележки 2 имеют меньшую конструктивную скорость движения по сравнению с конструктивной промежуточными опорными тележками 3, которые двигаются в «стоп-стартовом» режиме. На орошаемом участке поля проложен оросительный канал 11, откуда водозаборное устройство 12 при помощи насоса 13 через расходомер 14 и электрогидрозадвижку 15 подает воду в трубопровод 1. Манометр 16, который установлен в трубопроводе 1, имеет электрический выход и служит для измерения давления воды. Электродвигатель 17 предназначен для привода насоса 13, который подает воду в трубопровод 1. Электродвигатель 17 питается от щита управления (ЩУ) 18, в котором размещена защитная аппаратура, через пульт управления (ПУ) 19. В ПУ 19 размещен микропроцессорный блок управления (МБУ)20, счетчик электрической энергии (СЭ) 21, контактор (К) 22 и таймер 23. МБУ 20 предназначен для управления движением и процессом полива, хранения результатов регистрации и вычисления показателей энергоэффективности процесса полива. СЭ 21 предназначен для измерения расхода электрической энергии. Показания СЭ 21 непрерывно поступают в МБУ 20. Таймер 23 предназначен для синхронизации работы МБУ 20. Команда на включение К 22 поступает от МБУ20. Выход К 22 соединен с электродвигателем 17. К 22 служит для коммутации электродвигателя 17 с частотным преобразователем (ЧП) 24. Сигнал от МБУ 20 поступает на ЧП 24, который преобразует (регулирует) напряжение и частоту сети. При помощи ЧП 24 регулируется напряжение и частота, подаваемые на электроприводы 8 крайних ведущих тележек 2 и промежуточных тележек 3, вследствие чего регулируется скорость вращения электропривода 8 и скорость вращения колес 9 и, следовательно, скорость движения опорных тележек 2, 3. Также от ЧП 24 регулируемое напряжение поступает на электродвигатель 17 через К 22. Для обеспечения различных норм полива предназначен задатчик норм полива 25, а при помощи задатчика длины участка полива 26 задается длина участка полива (длина участка полива зависит от длины участка посева сельхоз культуры), выходы которых соединены с МБУ 20. Сигнал на остановку машины по состояниям ПСЛ 7 (аварийный выбег) формируется в системе синхронизации тележек в линию 27. Система стабилизации курса 28, которая установлена над направляющим тросом 29 имеет устройство стабилизации курса (УСК) 30, которое крепится на промежуточной опорной тележке 3, которая находится рядом с оросительным каналом 11, и вырабатывает команду на коррекцию соответствующей крайней ведущей опорной тележки 2, которая поступает на соответствующий ПСК10. На крайних ведущих опорных тележках 2 установлены датчики пути 31, которые измеряют фактический пройденный путь крайними ведущими опорными тележками 2 соответствующего крыла. Для передачи информации по каналам связи (например, норма полива, площадь полива, время полива и др.) и задания настроечных параметров используется интерфейсное устройство 32, которое соединено с МБУ20. Над оросительным каналом 11 на промежуточной опорной тележке 3, которая находится ближе к направляющему тросу 29, установлен на телескопическом механизме 33 токосъемник 34. Телескопический механизм 33 служит для компенсации бокового смещения промежуточной тележки 3 от контактной сети 35. Токосъемник 34 контактно соединен с контактной сетью 35, которая размещена на стойках 36 вдоль оросительного канала 11. Кожух 37, закрепленный на стойках 36, защищает контактную сеть 34 от прямого попадания дождя и служит защитным ограждением от случайного прикосновения оператором или посторонними лицами. Вакуум-насос 38 предназначен для забора воды в насос 13 через водозаборное устройство 12 из оросительного канала 11. Оросительная вода, пройдя через расходомер 14 и электрогидрозадвижку 15, поступает в трубопровод 1.
На каждых опорных тележках 2 и 3 установлены блоки управления поливом 39, в которых регулируется скважность сигналов. Выходы блока управления поливом 39, которые установлены на крайних ведущих опорных тележках 2, соединены с входами прибора стабилизации курса (ПСК) 10. Выходы блока управления поливом 39, которые установлены на промежуточных опорных тележках 3, соединены с входами прибора синхронизации тележек в линию (ПСЛ) 7. Входы блоков управления поливом 39 соединены с выходами блока анализа сигналов 40, выход которого соединен с входом МБУ 20, а вход блока анализа сигналов 40 соединен с GLONASS-приемником 41. Один из входов GLONASS-приемника 41 соединен с МБУ 20.
Все дождевальные насадки 4 разделены на группы в зависимости от количества опорных тележек 2 и 3 (18 групп дождевальных насадок 4). Например, половина дождевальных насадков 4, которые размещены на пролете машины слева и с права от опорных тележек 2 и 3, создают группу. Орошаемый участок поля по ширине захвата дождевальной машины делится на 18 участков по числу групп дождевальных насадок 4. На орошаемом участке поля в каждом квадрате устанавливаются измерители влажности 42, который измеряет влажность почвы и передает результат измерения на GLONASS-спутник 43. Средняя ширина захвата дождем группы дождевальных насадок 4 составляет около 45 метров (зависит от расстояния между опорными тележками 2 и 3 (длин пролетов). Длина орошаемого участка поля зависит от годовой нагрузки дождевальной машины и выращиваемой сельскохозяйственной культуры. Например, при годовой нагрузке на дождевальную машину площади полива, равной 105 га, длина орошаемого участка поля составит L=1250 метров. Орошаемый участок поля разделяется на квадраты. Количество квадратов размерами 45*45 м в направлении движения дождевальной машины составит 28 шт. Отсюда, суммарное количество квадратов и количество измерителей влажности 42 (при условии, что в каждый квадрат будет установлена один измеритель влажности 42) составит 18*28=504 шт. В направлении движения длина квадратов (прямоугольников) может быть и более 45 м в зависимости от рельефа орошаемого участка поля. В таком случае количество измерителей влажности 42 будет значительно меньше. По запросу оператора дождевальной машины или агронома хозяйства сигнал от измерителей влажности 42 через GLONASS-спутник 43 поступает на GLONASS-приемник 41 и далее на блок анализа сигналов 40. Информация показаний измерителей влажности 42 через GLONASS-спутник 43, GLONASS-приемник 41 и блок анализа сигналов 40 поступает на МБУ 20, который соединен с входом сенсорного экрана 44. На сенсорном экране 44 может быть отображена карта полива поля с указанием минимальных, максимальных и средних значений норм полива. Карта полива может быть передана из GLONASS-спутника 43 на систему управления поливом 45.
Из системы управления поливом 45 через GLONASS-спутник 43, GLONASS-приемник 41 и блок анализа сигналов 40 на МБУ 20 может быть подана команда на начало полива орошаемого участка поля.
Информацию о влажности почвы на орошаемом участке поля, например, после осадков, до полива или после полива можно получить в системе управления поливом 45.
Предлагаемое устройство работает следующим образом.
Предлагаемое устройство может работать с различными алгоритмами управления. Например, автоматизированный, полуавтоматизированный и ручной алгоритмы управления энерготехнологическим процессом полива.
1. Автоматизированный алгоритм управления. В зависимости от фактической влажности почвы квадратов орошаемого поля, сигнал от соответствующих измерителей влажности 42 передается на GLONASS-спутник 43, который в свою очередь, передает сигнал на GLONASS-приемник 41. Далее сигналы поступают на блок анализа сигналов 40, где определяется минимальная скорость движения дождевальной машины, при котором обеспечивается максимальная норма полива (квадрат, в котором измеренная влажность почвы самая низкая). В квадратах, в которых влажность почвы выше минимального значения влажности, блок анализа сигналов 40 вырабатывает команду на соответствующий блок управления поливом 39, который в свою очередь, путем изменения скважности сигнала на электроуправляемые клапаны 5 через ПСЛ 7 и ПСК 10 будет изменять расход через дождевальные насадки 4. Сигнал от блока анализа сигналов 40 также поступает на МБУ 20. На вход сенсорного экрана 44 от МБУ 20 поступают результаты измерения измерителей влажности 42 и представляются на сенсорном экране 44, например, в виде карты поля с указанием норм полива по каждому квадрату. При управлении дождевальных насадок 4 при помощи регулирования скважности сигнала открытия и закрытия группы дождевальных насадок может произойти колебание напора оросительной воды в трубопроводе 1, что отрицательно влияет на качество дождя и режима работы насоса 13. Скважность сигнала на управление электроуправляемых клапанов 5 группы дождевальных насадок 4 регулируется длительностью времени включения и длительностью времени отключения электроуправляемых клапанов 5 в интервале времени, например, 10 секунд. При изменении напора воды в трубопроводе 1 сигнал от манометра 16 и расходомера 15, поступает на МБУ 20, после отработки сигнала из МБУ 20 команда поступает через ЧП 24 на электродвигатель 17, тем самым стабилизируются расход и напор в трубопроводе 1. При подходе соответствующих опорных тележек 2 и 3 к очередному квадрату орошаемого поля блок анализа сигналов 42 задает другое значение сигнала на блок управления поливом 38 соответствующих опорных тележек 2 и 3, и тем самым, изменится скважность сигналов управления группы дождевальными насадками 4.
2. Полуавтоматизированный алгоритм управления. Например, при влагозарядковом поливе нет необходимости точного нормирования нормы полива по квадратам. Оператор при помощи задатчика нормы полива 25 задает необходимую норму полива. При этом сигналы от измерителей влажности 42 не используются или измерители влажности 42 могут быть удалены с орошаемого участка поля.
3. Ручной алгоритм управления. В зависимости от вида сельскохозяйственной культуры и отсутствия спутниковой связи (например, при магнитных бурях, профилактические перерывы и др.) агрономом на задатчике нормы полива 25 задается норма полива и при помощи задатчика длины участка поля 26 задается длина участка полива. При восстановлении спутниковой связи или при поливе другого участка поля агрономом может быть задан любой алгоритм управления.
Напряжение питания (например, 380 В, 50 Гц) подается при помощи токосъемника 34 из контактной сети 35 на ЩУ 18. Телескопический механизм 33 соединяет токосъемник 34 с промежуточной тележкой 3, который компенсирует боковое отклонение. Из ЩУ18 электрическая энергия поступает через СЭ 21 на ЧП 24 и контактор 22. Перед началом работы по команде МБУ 20 электрогидрозадвижка 15 закрывается и подается питание на вакуум-насос 38. После заливки насоса 13 (заполнение водой насоса 13) МБУ 20 отключает вакуум-насос 38, включает электродвигатель 17 через контактор 22 и открывает электрогидрозадвижку 15. Оросительная вода подается в трубопровод 1, при этом расходомер 14 измеряет количество воды, израсходованное на полив. Показания расходомера 14 и манометра 15 поступают на МБУ 20. При отсутствии аварийных сигналов, поступающих в МБУ 20 от систем синхронизации тележек в линию 27 и системы стабилизации курса 28, МБУ 20 вырабатывает команду на ПСК 10 обоих крыльев и движение крайних ведущих тележек 2, со скоростью, которая определяется в зависимости от нормы полива, определяемой задатчиком нормы полива 25, или по данным измерителей влажности 42.
При ручном алгоритме управления, например, на задатчике нормы полива 25 и задатчике длины участка полива 26 в зависимости от вида и фазы развития сельхозкультуры задается норма полива, например, полив с нормой 300 м3/га, а длина участка полива, например 250 м, зависит от длины участка посева (площади посева) различных культур на данном орошаемом участке поля. В МБУ 20 вырабатывается команда на ЧП 24. ЧП 24, путем регулирования, на опорные тележки 2 и 3 подает такое напряжение, при котором скорость движения крайних ведущих опорных тележек 2 обеспечивает норму полива 300 м3/га.
Алгоритм обработки сигналов измерителей влажности 42 на блоке анализа сигналов 40 позволяет исправлять ошибки при выходе из строя измерителей влажности 42. Сигнал от вышедшего из строя измерителя влажности 42 заменяется на сигнал предыдущего или соседнего измерителя влажности 42, то есть при отсутствии сигнала от какого-то измерителя влажности 42 данный квадрат будет иметь норму полива, равную норме полива предыдущего квадрата или соседнего квадрата.
На ПСЛ 7 обоих крыльев с МБУ20 поступает напряжение питания (для подключения электропривода 8 и электроуправляемых клапанов 5). ПСЛ 7 промежуточных опорных тележек 3 при отставании его относительно двух соседних вырабатывает команду на включение электропривода 8, которая приводит во вращение колесо 9 промежуточной опорной тележки 3. На ПСЛ 7 также поступает сигнал от блока управления поливом 39.
Сигналы с датчиков пути 31, которые установлены на крайних ведущих опорных тележках 2, поступают на МБУ20. При выбеге промежуточных тележек 3 на величину больше допустимого относительно соседних тележек ПСЛ 7 подключает группу электроуправляемых клапанов 5 в сеть и вода, поступающая из трубопровода 1, прекратит поступать через патрубки 6 и электроуправляемые клапаны 5 в дождевальные насадки 4. При отставании промежуточных опорных тележек 3 по отношению к соседним на величину больше допустимого, ПСЛ 7 вырабатывает команду на ее движение, при этом напряжение снимается с группы электроуправляемых клапанов 5 и вода через дождевальные насадки 4 будет поступать в виде дождевого облака на орошаемое поле.
При отклонении дождевальной машины от курса (от направляющего троса 29) УСК 30 вырабатывает команду на коррекцию «выбежавшего» крыла (например, левого крыла). В режиме коррекции левого крыла крайняя ведущая опорная тележка 2 левого крыла по команде МБУ 20 через ПСК 10 останавливается и полив через группу дождевальных насадок 4, относящихся к ней, прекращается. На ПСК 10 также поступает сигнал от блока управления поливом 39.
При использовании предлагаемого устройства в качестве источника энергии используется трансформаторная подстанция (например, ТП 10/0,4 кВ), питающая контактную сеть 35. В качестве источника механической энергии для привода насоса 13 используется электродвигатель 17 (например, асинхронный электродвигатель), который имеет КПД ηдв=0,85…0,9. В качестве источника электрической энергии для электроприводов служит сама электрическая сеть. То есть, нет необходимости применения двигателя внутреннего сгорания, который загрязняет окружающую среду и имеет повышенный шум, и генератора.
В МБУ 20 сохраняются регистрированные и вычисленные параметры энерготехнологического процесса полива, такие как, расход электрической энергии, расход воды на полив, площадь полива, норма полива, длительность полива во времени, количество поливов и оросительная норма полива за сезон. Параметры энерготехнологического процесса полива через ИУ 32 и каналам связи могут быть переданы в систему высшего уровня. По ИУ 32 при помощи МБУ 20 возможно задание различных алгоритмов управления движением машины. Экспериментально установлено (полевые заводские испытания дождевальных машин «Кубань-Л» и «Каравелла-Л»), что коэффициент замедления и увеличения скорости движения ведущих опорных тележек может быть задан в пределах от 10 до 35% от заданной скорости движения. Также из системы управления поливом 45 может быть задана команда на начало полива орошаемого участка поля.
Оперативно на основании регистрированных и заархивированных данных могут быть определены показатели энергоэффективности выполнения в энерготехнологическом процессе полива, например, расход энергии, расход оросительной воды, площадь полива, суммарный расход оросительной воды за сезон, энергоемкость полива единицы площади полива и другие.
При использовании предлагаемого устройства коэффициент эффективного полива достигает до 0,95, что подтверждено экспериментальными исследованиями и путем математического моделирования движения машины на ЭВМ.
Устройство автоматизированного управления многоопорной дождевальной машиной фронтального действия для точного полива, включающее установленные на тележках с электроприводом трубопроводы правого и левого крыльев машины, блок синхронизации движения по курсу с направляющим тросом и блок управления скоростью движения машины, вдоль оросительного канала установлена на стойках контактная сеть, взаимодействующая с токосъемником, который через телескопический механизм закреплен на тележке, движущейся по противоположной стороне оросительного канала, при этом выход токосъемника соединен с входом щита управления, выход которого соединен с входом счетчика электрической энергии, выходы которого соединены с входами микропроцессорного блока управления и частотного преобразователя, входы микропроцессорного блока управления соединены с таймером, системой стабилизации курса, системой синхронизации тележек в линию, датчиками пути, задатчиком нормы полива, задатчиком длины участка полива, расходомером и манометром, установленным на трубопроводе, а выходы микропроцессорного блока управления соединены с электрогидрозадвижкой, частотным преобразователем, контактором, приборами синхронизации тележек в линию и приборами стабилизации курса левого и правого крыла, через вакуум-насос с входом насоса, выход которого через электрогидрозадвижку и расходомер соединен с трубопроводом, при этом микропроцессорный блок управления соединен с входом-выходом интерфейсного устройства, сигнал с выхода частотного преобразователя подается на электропривод левого и правого крыла машины, а выход контактора соединен через электродвигатель с входом насоса, отличающееся тем,что сигнал, полученный с измерителей влажности, установленных на орошаемом участке поля, поступает на систему управления поливом через GLONASS-спутник, сигнал с системы управления поливом через GLONASS-спутник передается на вход-выход GLONASS-приемника, выход которого через блок анализа сигналов соединен с микропроцессорным блоком управления, выход последнего соединен с GLONASS-приемником, а вход-выход микропроцессорного блока управления электрически соединен с сенсорным экраном, а выход частотного преобразователя соединен с входом контактора, при этом выход блока анализа сигналов соединен с входами блока управления поливом, выходы которых на крайних ведущих опорных тележках - с входом прибора стабилизации курса, а на промежуточных опорных тележках - с входом прибора синхронизации тележек в линию, как правого, так и левого крыльев машины.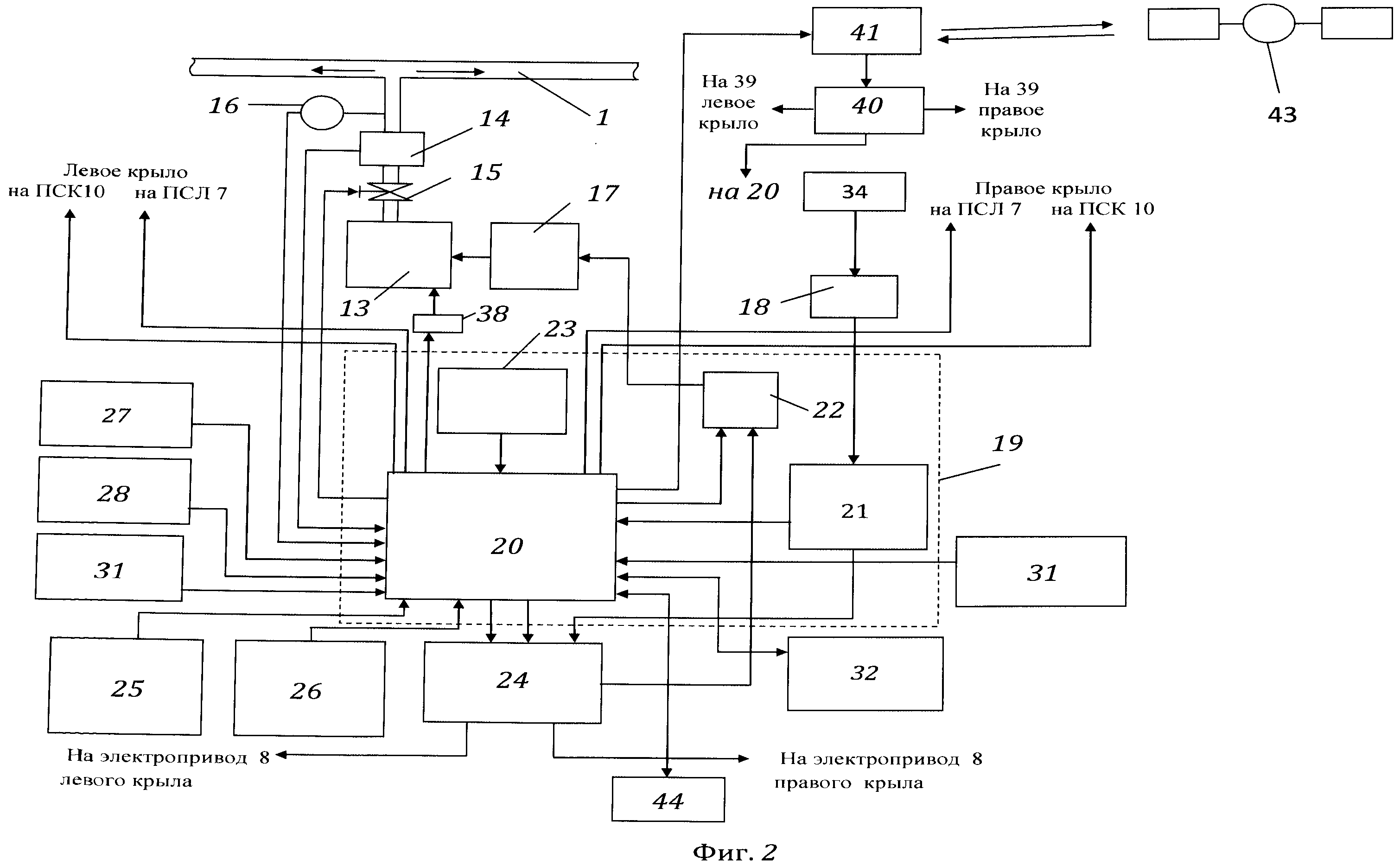
Аэродинамический транспортер для зерна
Способ диагностики состояния энергетических элементов, контроля и управления энергетической эффективностью потребительских энергетических систем
Устройство для предпосевной обработки крупных семян
Устройство автоматизированного управления многоопорной дождевальной машиной фронтального действия
Комбинированный ботвоуборочный агрегат
Устройство для очистки воздуха
Устройство для внесения жидких агрохимикатов
Стенд для "холодной" обкатки турбокомпрессоров энергетических установок
Устройство для определения энергетических параметров электродвигателя и относительной энергоемкости выполненной им работы
Устройство для определения потерь энергии в энерготехнологических процессах
Способ диагностики состояния энергетических элементов, контроля и управления энергетической эффективностью потребительских энергетических систем
Устройство для предпосевной обработки крупных семян
Устройство автоматизированного управления многоопорной дождевальной машиной фронтального действия
Устройство для очистки воздуха
Устройство для внесения жидких агрохимикатов
Стенд для "холодной" обкатки турбокомпрессоров энергетических установок
Устройство для определения энергетических параметров электродвигателя и относительной энергоемкости выполненной им работы
Устройство для определения потерь энергии в энерготехнологических процессах

