Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОТРЕБИТЕЛЕЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ
Вид РИД
Изобретение
Изобретение относится к способам и средствам радионавигационного определения местоположения потребителя навигационной информации в навигационном поле спутниковых навигационных систем и может быть использовано в космической радионавигации и геодезии.
Известен способ определения геодезических координат и скоростей неограниченного количества объектов навигационной аппаратуры потребителя по наблюдениям не менее четырех навигационных космических аппаратов (НКА), в котором N-канальным приемным устройством, установленным на объекте, принимают навигационные радиосигналы спутников, определяют дальности от объектов до каждого спутника путем измерения временных сдвигов кодовых последовательностей, формируемых генераторами спутников относительно кодовой последовательности, формируемой генераторами объекта, а также составляющие вектора скорости путем измерения принимаемых доплеровских сдвигов частоты с использованием систем слежения за несущими, при этом в N-канальном приемном устройстве, один из которых является ведущим, а другие ведомыми каналами, производят определение разности дальностей между дальностями, измеренными ведомыми приемными устройствами, и дальностью, измеренной ведущим приемным устройством, а также определение разностей скоростей изменения дальностей между скоростями изменения дальностей, вычисленными по измерениям доплеровских сдвигов частоты ведомыми приемными устройствами, и скоростью изменения дальности, вычисленной по измерению доплеровского сдвига частоты ведущим приемным устройством, затем производят определение двойных разностей дальностей и двойных разностей скоростей изменения дальностей путем взаимного вычитания друг из друга разностей дальностей и разностей скоростей изменения дальностей (см., например, описание к патенту РФ №2115137 на изобретение с приоритетом от 11.05.1994 г., МПК: G01S 5/00).
Известный способ относится к штатным режимам навигационных определений координат объектов навигационной аппаратуры потребителя и является наиболее близким аналогом-прототипом. Однако при его использовании имеют место проблемы, связанные с ошибками прогноза местоположения НКА на моменты измерений, с ошибками, обусловленными условиями распространения радиоволн в ионосфере и тропосфере и др. Известные способы компенсации условия распространения радиоволн в ионосфере используют двухчастотные измерения или вводят поправки, которые рассчитывают по априорным данным. Необходимо отметить, что компенсация условий распространения радиоволн в ионосфере, рассчитанная по априорным данным, является приближенной, а в одночастотной навигационной аппаратуре нет возможности компенсации двухчастотным методом.
Задачей изобретения является разработка способа радионавигационного определения местоположения потребителя навигационной информации в навигационном поле спутниковых навигационных систем, обеспечивающего возможность глобального определения геодезических координат, с компенсацией условия распространения радиоволн в ионосфере для одночастотной навигационной аппаратуры потребителя.
Сущность изобретения состоит в том, что в способ определения положения потребителей навигационной информации (ПНИ) спутниковых навигационных систем (СНС), основанный на определении координат положения объекта ПНИ с М-канальным приемным устройством (ПУ), принимающим навигационные радиосигналы от S спутников СНС, характеризующийся тем, что предварительно формируют пространственную решетку (ПР) из ожидаемых значений координат объекта ПНИ и в ПУ измеряют относительные скорости между фазовым центром антенны ПУ и координатами каждого из S спутников СНС при помощи измеренных доплеровских сдвигов частот, из которых формируют нормированные значения относительных скоростей или ускорений и вычитают нормированные расчетные значения относительных скоростей или ускорений между ожидаемыми положениями координат ПУ расположенными в узлах ПР и каждым из S спутников СНС, причем координаты ПНИ определяют итерационно путем поиска глобального минимума среднеквадратического отклонения разности измеренных и расчетных значений в узлах ранее сформированной пространственной решетки и уменьшения размеров этой пространственной решетки на каждой итерации.
Техническим результатом использования способа определения местоположения потребителя навигационной информации (ПНИ) в навигационном поле спутниковых навигационных систем (СНС) является повышение точности глобального определения в реальном времени его местоположения при работе навигационной аппаратуры потребителя (НАП) в автономном режиме.
Указанный технический результат достигается тем, что определение местоположения потребителя основано на использовании нормированных измеренных относительных ускорений ADk или скоростей VDk и нормированных расчетных значений относительных ускорений ARki или скоростей VRki, причем нормированные значения ADk и VDk получают при помощи измерений сдвигов доплеровских частот, а расчетные нормированные значения скоростей VRk1 или ускорений ARki ПНИ относительно каждого НКА из m спутников СНС определяют при помощи эфемеридной информации и информации о значениях координат, расположенных в узлах предварительно сформированной пространственной решетки.
Здесь обозначено: k=1, 2…m - условный номер НКА, навигационные измерения которого используются, m - число НКА используемых в НАП для j-х измерений.
Измеренные значения относительных скоростей Vdki=Vdk(ti-tν) для времени ti между каждым из k НКА и ПНИ определяют с помощью доплеровского сдвига частот νdk, вектор которого можно записать в виде
и полиноминальной интерполяции:
Vdki=h0*L0+h1*L1(ti-tν)+h2*L2(ti-tν),
L0=1, L1(ti-tν)=(ti-tν), L2(ti-tν)=1.5*(ti-tν)2-0.5, tν=((tj-tµ)/2.
Количество измеренных значений доплеровского сдвига частот µ≥3 выбирают в зависимости от дискретного интервала времени δt обновления навигационных измерений доплеровского сдвига частот и величины шумов в полученных измерениях.
Коэффициенты h1, h2 и h3 интерполяционного полинома h=(a T*а)*а T*νdk определяют при помощи метода наименьших квадратов.
Здесь
 - вектор коэффициентов,
- вектор коэффициентов,
а Т - транспонированная матрица а, ti - момент времени, на который определяются значения измеренных скоростей, νdj, νdj-1, …νdj-µ - измеренные значения доплеровских сдвигов частот, tj=tj-1+δt, νdj=νd(tj).
Измеренные значения относительных ускорений Adki=Adk(ti-tν) представляют в виде Adki=h1+3*(ti-tν)*h2 и определяют численным дифференцированием при помощи рассчитанных ранее коэффициентов полиноминальной интерполяции h1, h2.
Нормированные значения VDk=VDk(ti-tν) и ADk=ADk(ti-tν) вычисляют путем определения средних значений MAT(Vd), MAT(Ad) и СКО σ(Vd), σ(Ad):
VDk=(Vdk-MAT(Vd))/σ(Vd),
ADk=(Adk-MAT(Ad))/σ(Ad),
где
 ,
, 
 ,
, 
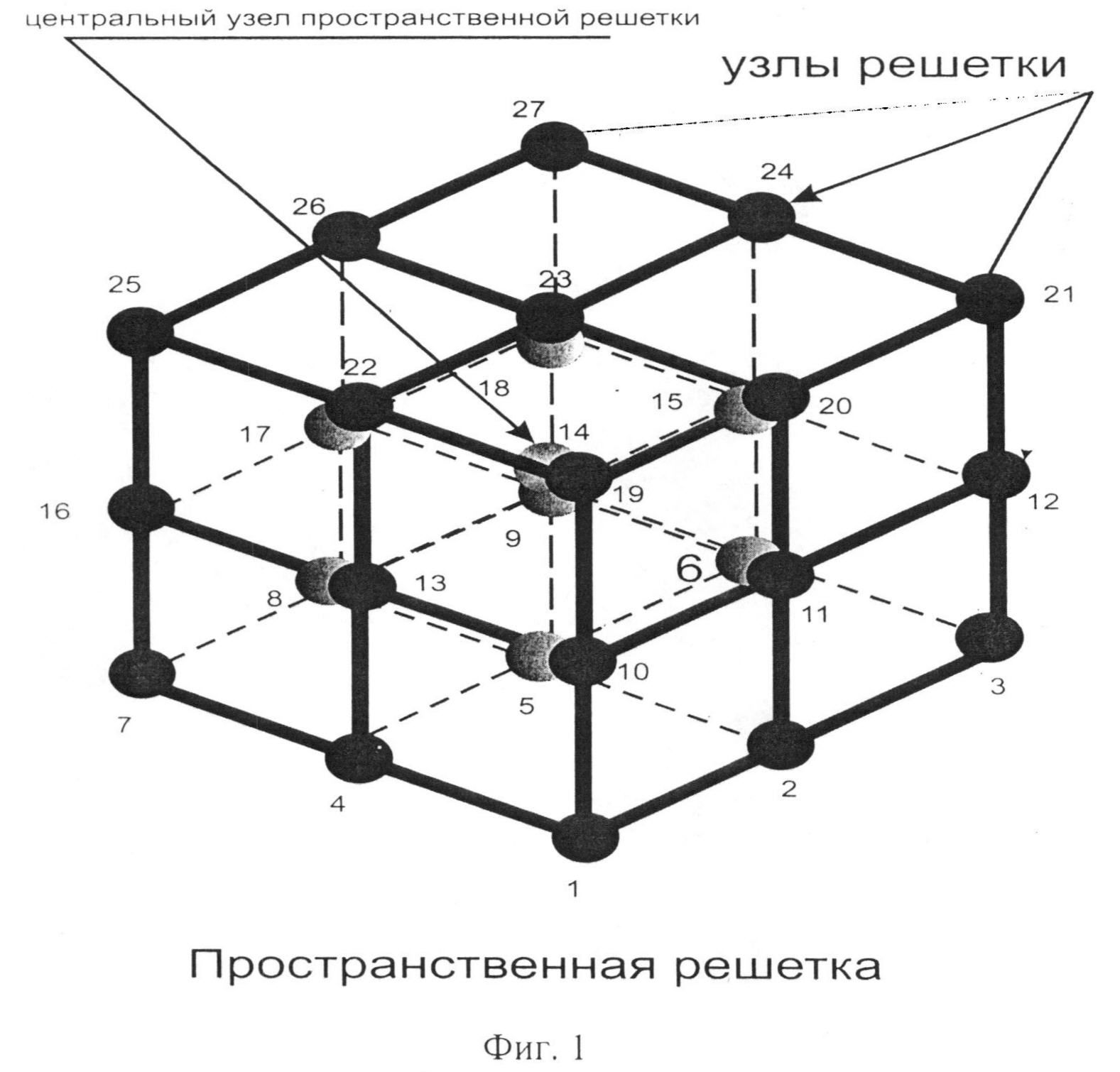
Для определения расчетных значений относительных скоростей Vrkl=Vrkl(ti-tν) и ускорений Arkl=Arkl(ti-tν) предварительно так формируют узлы СПР, чтобы с вероятностью Р=0.99 ожидаемое значение положения координат ПНИ находилось внутри СПР.
Пример изображения сформированного СПР, состоящего из 27 узлов (s=27), приведен на фиг.1.
Расчетные значения относительных скоростей Vrkl между координатами положения l-го узла СПР и k-го НКА определяют в виде: 
Dl(ti-tυ)=[(Xk-XНАПl)2+(Yk-YНАПl)2+(Zk-ZHАПl)2]1/2.
Здесь:
l - номер узла СПР, l=1, 2, …, s; Xk, Yk, Zk - координаты k-го НКА; XНАПl, YНАПl, ZНАПl - координаты ПНИ в узле l СПР.
Координаты и скорости НКА и ПНИ (в узлах СПР) рассчитывают в прямоугольной геоцентрической системе координат П3-90 или WGS-84 и времени ti.
Расчетные значения относительных ускорений Аrk1 между координатами положения l-го узла СПР и k-го НКА определяют как разности расчетных относительных скоростей Arkl=Vrkl-Vrkl.
Нормирование Vrkl и Arkl производят при помощи определения средних значений MAT(Vrl), MAT(Arl) и СКО σ(Vrl), σ(Arl).
Здесь имеем:
VRkl=(Vrkl-MAT(Vrl))/σ(Vrl),
ARkl=(Arkl-MAT(Arl))/σ(Arl),
 ,
,  и
и
 ,
,  .
.
Определение координат ПНИ осуществляют итерационным способом при помощи поиска узла lj, для которого СКО σmin минимально:
σmin=minσl, l=1, 2, …s
При решении задачи определения координат положения ПНИ с использованием относительных ускорений σl вычисляют по формулам:
 ,
,
а для задачи определения координат положения ПНИ с использованием относительных скоростей σ1 определяют из выражения
 ,
,
здесь δAil и δVil - абсолютные значения разностей ADi-ARil и VDi-VRil
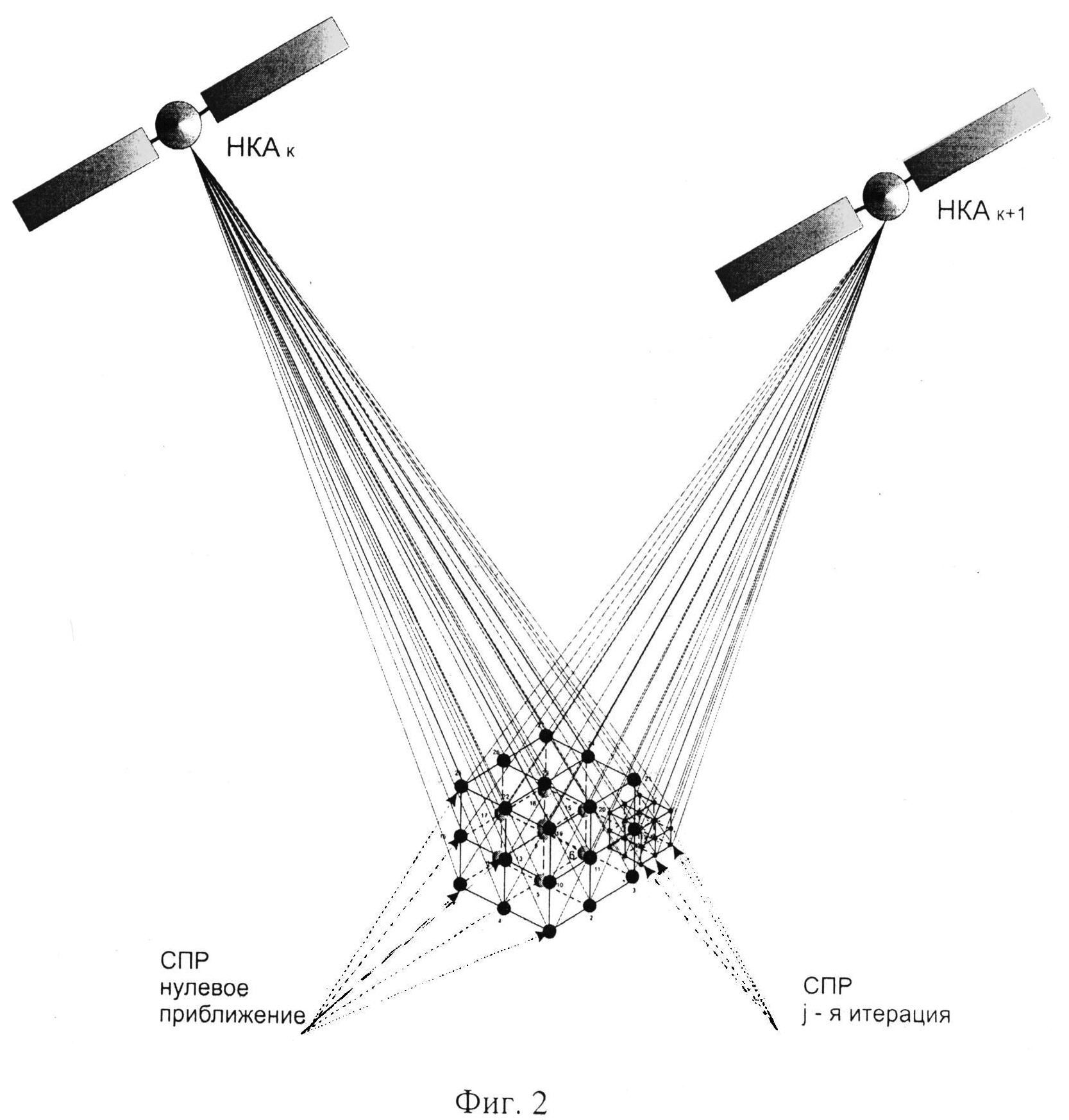
На каждой итерации объем (F) СПР уменьшается в U раз, а центр СПР перемещается в узел (Xj, YJ, Zj), соответствующий минимуму σmin для ℵ итерации.
Пример, иллюстрирующий изменение объема СПР на j-й итерации, приведен на фиг.2.
Возможность осуществления изобретения подтверждается ниже следующим описанием работы системы высокоточного определения местоположения ПНИ спутниковых навигационных систем типа ГЛОНАСС и GPS. В измеренных относительных ускорениях ADi практически отсутствуют ошибки:
- вызванные разбросом ошибок частотно временных значений НКА относительно частоты центрального генератора навигационной системы ГЛОНАСС/GPS;
- за счет нестабильности частот излучения опорного генератора НКА и опорного генератора НАП;
- дальномерных измерений;
- вызванные условиями распространения радиоволн в ионосфере, тропосфере и другими возможными причинами;
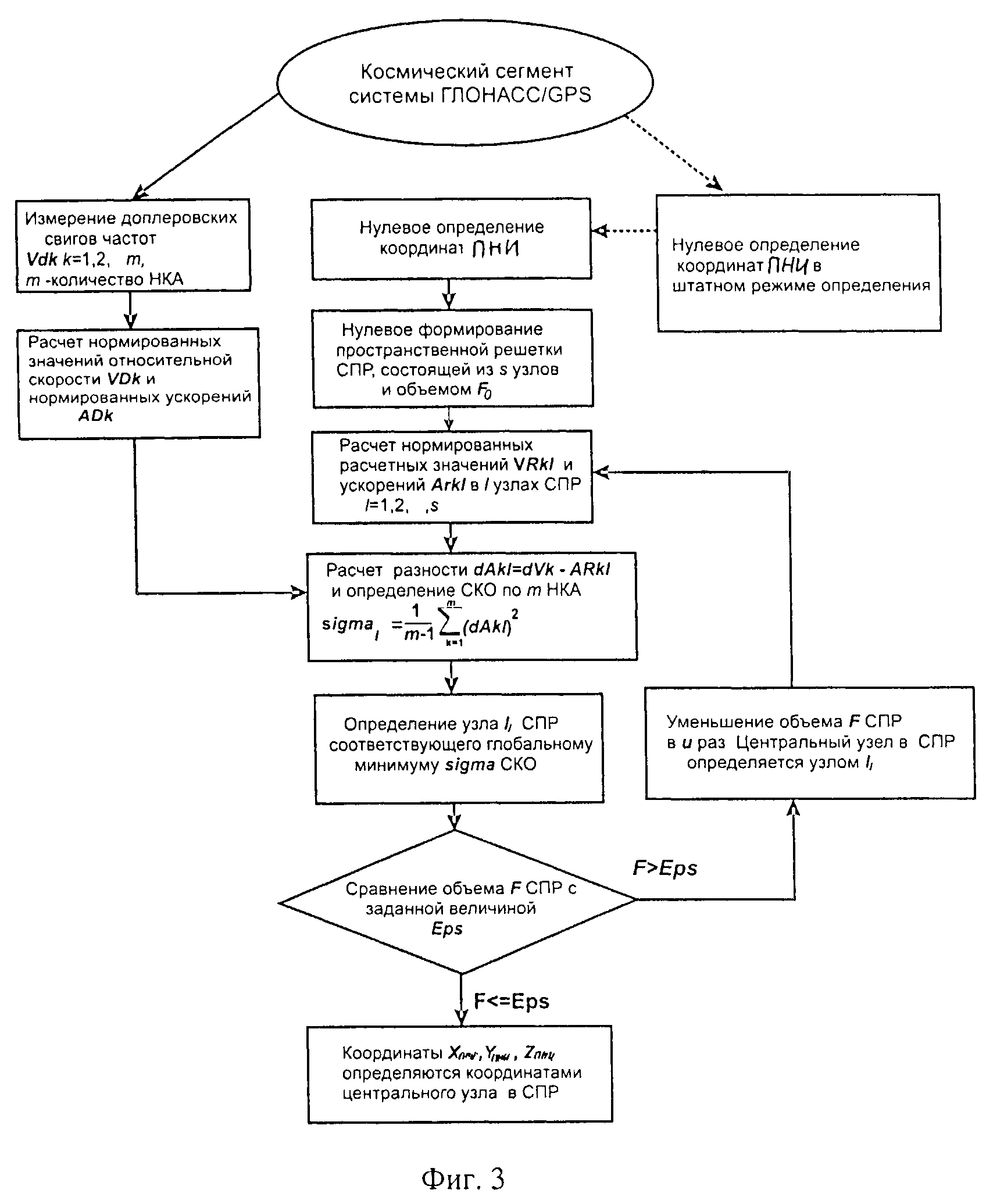
В измеренных относительных значениях относительных скоростей AVi компенсируются практически все ошибки дальномерных измерений и ошибки, вызванные условиями распространения радиоволн в ионосфере и тропосфере. Нулевое определение глобальных геодезических координат (Х0, Y0, Z0) в прямоугольной геоцентрической системе координат выполняют, используя известный способ (см., описание к патенту РФ №2115137). Центр СПР определяют в точке с координатами (Х0, Y0, Z0). На каждой итерации объем F СПР уменьшается в u раз, а центр СПР перемещается в узел (Xj, Yj, Zj), соответствующий минимуму σmin для данной итерации. Итерационный цикл заканчивают при достижении F заданной величины ε, соответствующей ожидаемой погрешности в определения координат.
Обобщенная структурная схема способа глобального определения местоположения ПНИ представлена на фиг.3.
Оценка эффективности предлагаемого в изобретении способа проводилась с применением метода имитационного математического моделирования с помощью разработанного авторами специального программного обеспечения, которое позволило в одинаковых условиях сравнить статистические характеристики погрешностей навигационного определения координат при использовании известного (штатного) способа и способа измерения координат ПНИ, предлагаемого в данном изобретении.
В таблице приведены статистические характеристики погрешностей навигационного определения координат при использовании штатного способа и предложенного способа измерения координат ПНИ по относительным ускорениям, полученные в результате обработки около 1000 реализаций и подтверждающие повышение точности глобального определения в реальном времени местоположения потребителя навигационной информации.
|
Ротор высокоскоростного генератора
Способ радиолокации на малых дальностях
Способ навигации, посадки и взлета вертолета
Способ задания виброударов
Способ поиска и обнаружения объекта
Способ обработки сверхширокополосных сигналов
Способ радиолокационного распознавания кораблей
Способ фильтрации нестационарных сигналов
Способ предотвращения продольного выкатывания воздушных судов за пределы взлетно-посадочной полосы и устройство для его осуществления
Способ обнаружения объектов
Ротор высокоскоростного генератора
Способ радиолокации на малых дальностях
Способ навигации, посадки и взлета вертолета
Способ задания виброударов
Способ поиска и обнаружения объекта
Способ обработки сверхширокополосных сигналов
Способ радиолокационного распознавания кораблей

