Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА В ДАННЫЙ МОМЕНТ И КОНТРОЛЯ ДОСТОВЕРНОСТИ ПОЛОЖЕНИЯ УПОМЯНУТОГО ДВИЖУЩЕГОСЯ ОБЪЕКТА
Вид РИД
Изобретение
Настоящее изобретение касается способа определения положения движущегося объекта и контроля достоверности положения упомянутого движущегося объекта в данный момент t. Обычно движущимся объектом является летательный аппарат.
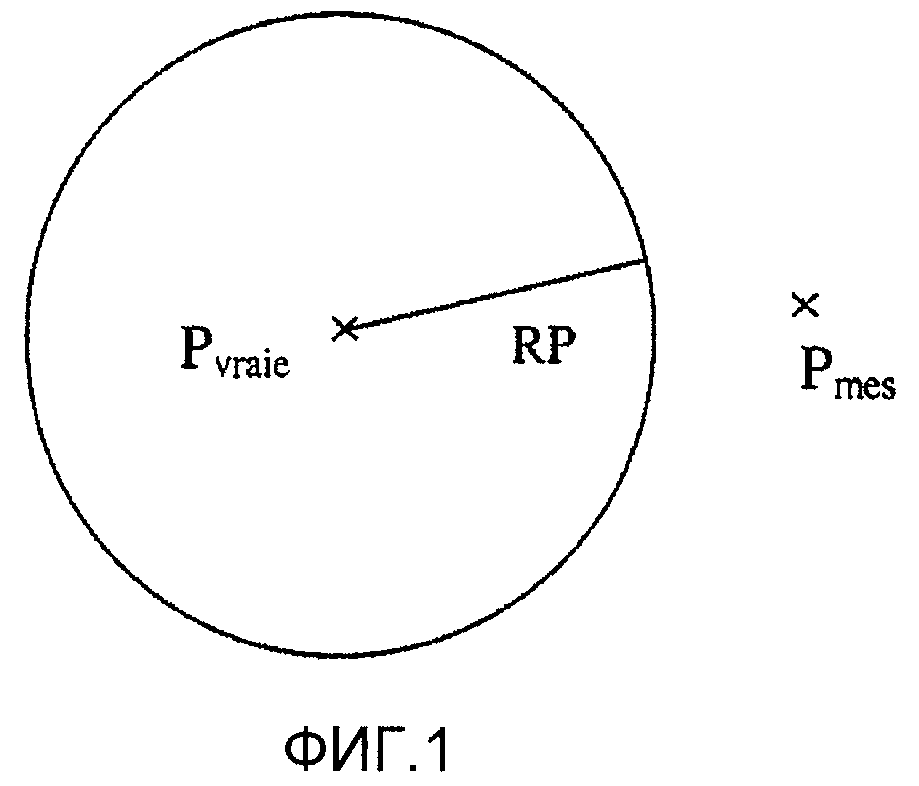
Для квантификации достоверности измерения положения в применении для области авиации, где достоверность является критическим критерием, используют параметр измерения положения, называемый «безопасным радиусом» RP. Безопасный радиус соответствует максимальной погрешности положения при данной вероятности появления погрешности.
Как показано на фиг. 1, при заранее определенной вероятности недостоверности безопасный радиус измерения Р является верхним пределом отклонения между вычисленным значением Pmes и истинным значением Pvraie измеряемой величины, при котором получают вероятность, меньшую заранее определенной вероятности недостоверности того, что истинное значение отличается от вычисленного значения на расстояние, превышающее безопасный радиус, без выдачи тревожного сигнала в навигационную систему. Иначе говоря, существует максимальная вероятность, равная заранее определенной вероятности недостоверности, что измеряемое значение находится за пределами окружности с радиусом, равным безопасному радиусу, вокруг истинного значения.
Известны способы определения положения движущегося объекта и контроля достоверности этого положения в данный момент t на основании сигналов, поступающих от группировки видимых спутников. Систему, применяющую способ этого типа, принято называть системой GNSS (“Global Navigation Satellite System”).
В этих способах приемник спутникового позиционирования, установленный на борту движущегося объекта, выдает данные положения движущегося объекта, полученные посредством триангуляции на основании сигналов, передаваемых спутниками, видимых движущимся объектом. Выдаваемые данные могут быть на момент недоступны, так как приемник должен иметь в прямой видимости минимум четыре спутника системы позиционирования для обеспечения вычисления положения. Кроме того, они имеют переменную точность, зависящую от геометрии группировки, на которой основана триангуляция, и могут быть зашумлены, так как основаны на приеме сигналов очень низкого уровня, поступающих от удаленных спутников с низкой мощностью передачи. Но они не подвержены долговременному отклонению, поскольку положения спутников, движущихся по своим орбитам, известны с точностью за длительный период. Шумы и погрешности могут быть связаны с неисправностями спутников. Под «неисправностью» следует понимать ненормальную ситуацию, когда спутник передает сигналы, которые кажутся нормальными, но являются ненормальными и приводят к погрешностям положения, связанным, например, со спутниковыми системами, с приемником или с распространением сигнала между спутниковым передатчиком и приемником сигналов GNSS.
Основным ограничением способов этого типа является недостаточная доступность. Положения и вычисления достоверности могут быть на момент недоступными, если данные, передаваемые спутниками, являются недоступными. Это же относится и к случаю, когда приемник спутникового позиционирования оборудуют системой оценки точности и доступности, называемой RAIM (от англо-саксонского “Receiver Autonomous Integrity Monitoring”), выполненной с возможностью обнаружения аномалий и оповещения пользователя, и системой FDE (“Fault Detection Exclusion”), моментально исключающей неисправный спутник. Эти устройства позволяют моментально уменьшать погрешность в последующем вычислении положений. В этом случае говорят о процессе “snapshot”.
Известны так называемые гибридные способы INS/GNSS без улучшения, в которых при помощи блока гибридизации математически комбинируют данные, выдаваемые инерциальным блоком позиционирования, и данные, поступающие от приемника спутникового позиционирования, чтобы объединить преимущества двух типов информации. Инерциальный блок позиционирования обычно называют системой INS (“Inertial Navigation System”). Он установлен на борту движущегося объекта и содержит совокупность инерциальных датчиков (гиродатчики и акселерометрические датчики). Он выполнен с возможностью непрерывной выдачи данных позиционирования, причем эти данные являются точными в краткосрочной перспективе. С другой стороны, эти данные отклоняются в долгосрочной перспективе (под влиянием дефектов датчиков).
Пример способа определения положений и контроля их достоверности описан в патентной заявке WO2008040658, поданной на имя заявителя. В этом способе гибридизацию осуществляют при помощи фильтра Кальмана. Фильтр Кальмана принимает точки положения и скорости от инерциального измерительного блока и измерения позиционирования (псевдорасстояние и псевдоскорость) от блока спутникового позиционирования (при этом говорят о плотной гибридизации или гибридизации по спутниковым осям), и он моделирует изменение погрешностей инерциального блока и выдает апостериорную оценку этих погрешностей, которая позволяет скорректировать точку позиционирования и скорости инерциального блока. Гибридизацию осуществляют в замкнутом цикле.
Способ контроля достоверности измерения положения состоит в непрерывном вычислении безопасного радиуса, связанного с измерением положения движущегося объекта. Как правило, безопасный радиус измерения положения, вычисляемый при помощи способа этого типа, имеет характеристики, близкие к характеристикам безопасного радиуса устройства типа GNSS (как правило, несколько сот метров с вероятностью превышения безопасного радиуса погрешностью положения без подачи тревожного сигнала - порядка от 10-5 до 10-7 ч-1).
Гибридные способы используют преимущества способов, основанных на инерциальном измерительном блоке, и способов, основанных на измерительном блоке GPS; за счет инерциального блока позиционирования они имеют преимущество непрерывно выдавать положения и безопасные радиусы, при этом положения не имеют отклонений в долгосрочной перспективе за исключением случаев потери спутниковой информации, и безопасные радиусы не имеют резких скачков значения во время потери доступности спутниковой информации. Кроме того, вычисленные таким образом данные положения имеют точность, близкую к точности устройства позиционирования GNSS, когда спутниковая информация является доступной.
Кроме того, известны способы улучшения GNSS типа GBAS или SBAS, основанные на использовании одной или нескольких наземных станций, которые могут идентифицировать погрешности в данных, поступающих от спутников, и выдавать в улучшенный блок спутникового позиционирования, установленный на борту летательного аппарата, индивидуальные поправки сигналов, передаваемых спутниками.
Способы улучшения позволяют выдавать данные положения более высокой точности, чем данные, поступающие от блока спутникового позиционирования, и контролировать достоверность этих измерений за счет обеспечения доступа к небольшим (обычно декаметровым) безопасным радиусам с уровнем достоверности, определяемым системой (вероятность превышения безопасного радиуса погрешностью положения без подачи тревожного сигнала классически составляет от 10-5 до 10-7 ч-1).
Способ улучшения SBAS (от англо-саксонского “Space-Based Augmentation System”) основан на системе улучшения, находящейся не на борту, а на земле и содержащей связанные между собой опорные наземные станции, которые принимают данные, передаваемые спутниками, определяют в этих данных ошибки, а также соответствующие поправки. Поправки и данные о достоверности направляют на геостационарные спутники, которые передают их в улучшенный бортовой блок позиционирования. Способ улучшения GBAS (“Ground Based Augmentation System”) осуществляют при помощи не бортовой системы улучшения, содержащей локальную станцию, точное положение которой известно. Локальная станция вычисляет поправки и достоверность и передает их в бортовой блок позиционирования, например, по радиочастотной связи.
Положения и вычисления достоверности, полученные при помощи способов улучшения, могут быть на момент не доступными, если данные, направляемые спутниками, не доступны или если система улучшения дает сбой. Кроме того, их можно рассматривать как недоступные, если они не отвечают требуемым условиям точности и достоверности.
Известны способы позиционирования, основанные на использовании устройств позиционирования, выполненных с возможностью вычисления положений и контроля достоверности упомянутых положений с более высокой точностью и/или с меньшими безопасными радиусами, чем при использовании вышеупомянутого гибридного устройства типа INS/GNSS. Информация, поступающая от этих устройств, как и информация от устройств улучшения, может быть в некоторые моменты не доступна.
Настоящее изобретение призвано предложить способ определения положения движущегося объекта и контроля достоверности измерения положения, который имеет преимущества как гибридного способа INS/GNSS, так и способа улучшения, или, в целом, преимущества способа позиционирования, который в основном является более эффективным, чем гибридный способ, но который может быть на момент не доступен.
В частности, изобретение призвано предложить способ и систему определения положения движущегося объекта и контроля достоверности измерения положения, которые имеют такие же небольшие безопасные радиусы, как и способ улучшения (или, в целом, как вышеупомянутое устройство позиционирования), которые гарантируют достоверность выдаваемых измерений положения и которые позволяют производить измерения положения и контролировать их достоверность в непрерывном режиме.
В связи с этим объектом настоящего изобретения является способ определения положения движущегося объекта в данный момент и контроля достоверности положения упомянутого движущегося объекта, при этом упомянутый способ содержит:
- этап запоминания положения упомянутого движущегося объекта в предыдущий момент и связанного с ним безопасного радиуса,
- этап получения, когда они доступны, промежуточных данных положения, поступающих от устройства промежуточного позиционирования, и промежуточного безопасного радиуса, связанного с промежуточным положением, поступающим от упомянутого устройства промежуточного позиционирования,
- этап получения данных гибридной скорости и безопасного радиуса, связанного с гибридной скоростью, определяемых блоком гибридизации INS/GNSS,
- этап определения поддерживаемого положения в данный момент посредством добавления к положению движущегося объекта в предыдущий момент интеграла гибридной скорости между предыдущим моментом и данным моментом,
- этап определения поддерживаемого безопасного радиуса, связанного с поддерживаемым положением, посредством добавления к безопасному радиусу положения в предыдущий момент, интеграла безопасного радиуса гибридной скорости между предыдущим моментом и данным моментом,
- этап определения наилучшего положения на данный момент, при этом наилучшее положение является:
- когда данные, поступающие от устройства промежуточного позиционирования, доступны, - положением, связанным с наилучшим безопасным радиусом, при этом наилучший безопасный радиус выбирают посредством сравнения, в зависимости от заранее определенного критерия выбора, промежуточного безопасного радиуса с поддерживаемым безопасным радиусом в данный момент,
- когда данные, поступающие от устройства промежуточного позиционирования, недоступны, поддерживаемым положением в данный момент.
Способ в соответствии с настоящим изобретением может также иметь следующие признаки, взятые отдельно или в комбинации:
- блок гибридизации применяет способ коррекции, основанный на независимости неисправностей, возникающих на разных спутниках,
- критерий выбора состоит в идентификации, в качестве наилучшего безопасного радиуса, наименьшего безопасного радиуса среди промежуточного безопасного радиуса, связанного с промежуточным положением, и поддерживаемого безопасного радиуса, связанного с поддерживаемым положением,
- этапу получения безопасного радиуса гибридной скорости предшествует этап определения блоком гибридизации горизонтального (и/или вертикального) безопасного радиуса гибридной скорости, содержащий следующие этапы:
определение вспомогательного горизонтального (и/или вертикального) безопасного радиуса гибридной скорости при так называемом предположении Н1, согласно которому одно из необработанных измерений является ошибочным,
определение вспомогательного горизонтального (и/или вертикального) безопасного радиуса гибридной скорости при так называемом предположении Н0, согласно которому ни одно из необработанных измерений не является ошибочным,
определение горизонтального (и/или вертикального) безопасного радиуса гибридной скорости как максимума из вспомогательных горизонтальных (и/или вертикальных) безопасных радиусов гибридной скорости, при этом определение вспомогательных горизонтальных (и/или вертикальных) безопасных радиусов гибридной скорости основано на определении радиуса окружности, описанной вокруг доверительного эллипса в горизонтальной (и/или вертикальной) плоскости, и доверительный эллипс определяют на основании вариационно-ковариационной матрицы и искомого значения вероятности.
Объектом настоящего изобретения является также глобальная система, предназначенная для установки на борту движущегося объекта, при этом глобальная система содержит:
- подсистему, выполненную с возможностью применения способа в соответствии с настоящим изобретением,
- инерциальный измерительный блок, выдающий инерциальные данные,
- приемник спутникового позиционирования, принимающий сигналы от группировки отслеживаемых видимых спутников и выдающий необработанные данные,
- блок гибридизации, выдающий данные гибридной скорости и безопасный радиус гибридной скорости на основании инерциальных данных, выдаваемых инерциальным измерительным блоком, и необработанных данных, выдаваемых приемником спутникового позиционирования;
- устройство промежуточного позиционирования, выдающее промежуточные данные позиционирования и связанные с ними промежуточные безопасные радиусы.
Глобальная система может также иметь следующие признаки, взятые отдельно или в комбинации:
- устройство промежуточного позиционирования является улучшенным устройством позиционирования,
- движущийся объект является летательным аппаратом.
Способ в соответствии с настоящим изобретением позволяет получать более качественные данные положения с точки зрения безопасного радиуса и доступности, чем при использовании только системы улучшения или чем при использовании классического блока гибридизации. Кроме того, этот способ позволяет непрерывно контролировать достоверность предоставляемых данных. При этом говорят, что измерения положения, предоставляемые при помощи способа, всегда обеспечены для данного уровня достоверности.
Кроме того, благодаря гибридной скорости, положения устройства позиционирования поддерживаются с очень высокой точностью. Кроме того, положение и безопасный радиус, вычисляемые при помощи способа в соответствии с настоящим изобретением, являются скорее поддерживаемыми положением и безопасным радиусом, а не положением и безопасным радиусом гибридного положения, когда информация, поступающая от устройства позиционирования, недоступна или искажена. Таким образом, положения и безопасный радиус положения, предоставляемые при помощи заявленного способа, являются лучшими (с точки зрения безопасного радиуса), чем гибридные значения. Действительно, их инициализируют по значениям, поступающим от устройства промежуточного позиционирования, которое является более эффективным с точки зрения безопасного радиуса до наступления неисправности или недоступности, чем гибридное устройство.
Кроме того, способ в соответствии с настоящим изобретением позволяет предоставлять положения с использованием (через гибридную скорость, которая имеет хорошие характеристики) гибридизации типа INS/GNSS даже в случае потери улучшения или, в целом, устройства промежуточного позиционирования.
Другие признаки и преимущества изобретения будут более очевидны из нижеследующего подробного описания, представленного в качестве не ограничительного примера, со ссылками на прилагаемые чертежи, на которых:
Фиг. 1 (уже описана) - пример безопасного радиуса.
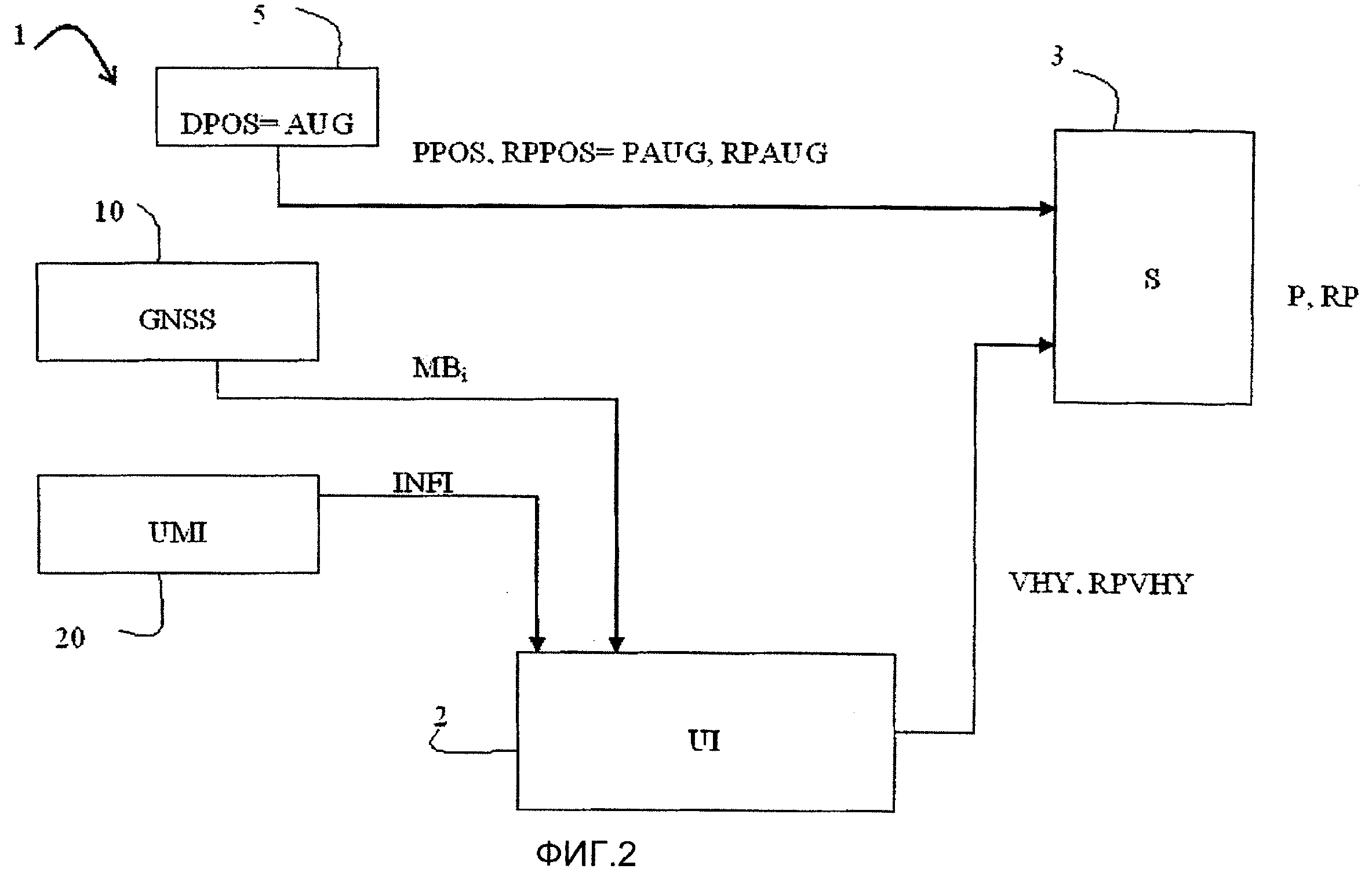
Фиг. 2 - схематичный вид заявленной глобальной системы определения положения движущегося объекта и контроля достоверности положения.
На этих фигурах одинаковые элементы обозначены одинаковыми позициями.
На фиг. 2 показана глобальная система 1, в которой применяют способ определения положения движущегося объекта и контроля достоверности положения в данный момент в соответствии с настоящим изобретением.
Глобальная система 1, предназначенная для установки на движущемся объекте, например на летательном аппарате, содержит приемник 10 спутникового позиционирования GNSS, принимающий сигналы от группировки из N отслеживаемых видимых спутников. Приемник 10 спутникового позиционирования GNSS выдает необработанные измерения MBi сигналов, передаваемых спутниками, при этом i обозначает индекс спутника, составляющий от 1 до N. Глобальная система содержит также устройство 5 промежуточного позиционирования DPOS, которое вычисляет данные положения и вертикальные безопасные радиусы и направляет их в подсистему 3, S. Это устройство промежуточного позиционирования выполнено с возможностью вычисления положений, которые предпочтительно имеют лучшие безопасные радиусы, чем гибридное устройство INS/GNSS, но которые могут быть в некоторые моменты недоступны (в случае неисправности или, например, если эти данные не отвечают заранее определенному условию достоверности). Кроме того, качество информации, предоставляемой этим устройством, с точки зрения безопасного радиуса, может в некоторые моменты ухудшаться. Например, речь идет об устройствах позиционирования, основанных на приемнике моментальных изображений (на англо-саксонском “snapshot”), или об устройстве, выполненном с возможностью предоставления точного и однозначного положения при прохождении над точной точкой.
Для большей ясности это устройство позиционирования будет называться устройством промежуточного позиционирования, вычисляющим промежуточные положения PPOS и горизонтальные и/или вертикальные безопасные радиусы RPhPOS и/или RPvPOS, связанные с промежуточным положением.
В варианте выполнения, показанном на фиг. 2, устройство промежуточного позиционирования является улучшенным устройством позиционирования, установленным на борту летательного аппарата и выполненным с возможностью приема сигналов, когда они доступны, от группировки из N отслеживаемых видимых спутников и не показанных поправок COR, когда они доступны, предоставляемых не бортовой системой позиционирования. Устройство 5 промежуточного позиционирования DPOS является, например, устройством типа SBAS или GBAS. В варианте улучшенная система позиционирования принимает поправки COR и необработанные данные, поступающие от приемника спутникового позиционирования GNSS.
В этом варианте выполнения промежуточные положения PPOS и промежуточные вертикальные RPvPOS и/или горизонтальные RPhPOS безопасные радиусы являются улучшенными положениями и безопасными радиусами, то есть данными, вычисленными на основании необработанных спутниковых данных, скорректированных с учетом поправок, поступающих от не бортовой системы улучшения. Данные от бортового улучшенного устройства позиционирования доступны, только когда доступна спутниковая информация и когда работают бортовые и не бортовые улучшенные устройства позиционирования.
Глобальная система 1 содержит инерциальный измерительный блок 20 измерения UMI, содержащий не показанные гиродатчики и акселерометры и выдающий инерциальные данные INFI в виде инкрементов углов, выдаваемых гиродатчиками, и инкрементов скорости, выдаваемых акселерометрами. Глобальная система 1 содержит также блок 2 гибридизации UI, принимающий инерциальные данные INFI, выдаваемые инерциальным измерительным блоком UMI 20, и необработанные данные MBi, выдаваемые приемником 10 спутникового позиционирования GNSS. Блок 2 гибридизации UI является блоком типа INS/GNSS. Иначе говоря, он математически комбинирует данные, предоставляемые инерциальным измерительным блоком, и данные, предоставляемые приемником спутникового позиционирования, для вычисления в каждый данный момент t гибридных скоростей.
Блок 2 гибридизации UI выдает измерения гибридной скорости VHY и вертикальных RPvVHY и/или горизонтальных RPhVHY безопасных радиусов гибридной скорости, связанных с измерениями гибридной скорости VHY.
Блок 2 гибридизации UI выполнен с возможностью предоставлять безопасные радиусы гибридной скорости RPvVHY, RPhVHY, как правило, порядка нескольких 10-2 м/с с вероятностью того, что погрешность гибридной скорости превысит безопасный радиус без подачи тревожного сигнала, порядка от 10-5 до 10-7 ч-1.
Далее следует описание примера блока 2 гибридизации UI, а также заявленного способа вычисления безопасного радиуса гибридной скорости RVHY(τ) блоком гибридизации или, в известных случаях, подсистемой 3. Блок 2 гибридизации UI описан в патентной заявке WO2008040658. Он содержит:
- фильтр гибридизации Кальмана,
- комплект из N вспомогательных фильтров,
- виртуальную платформу, принимающую данные, поступающие от инерциального измерительного блока,
- вычислительный модуль.
Виртуальная платформа выдает точки гибридного позиционирования и гибридной скорости, при этом PPVI является соответственно гибридным положением и гибридной скоростью. Выход гибридного блока 2, UI содержит гибридные скорости, выдаваемые виртуальной платформой, а также горизонтальные и вертикальные безопасные радиусы гибридной скорости.
Предпочтительно виртуальная платформа применяет барометрические измерения высоты, чтобы избежать ухода гибридного положения по вертикальной оси.
Фильтр гибридизации Кальмана производит оценку погрешностей на инерциальных положениях PPVI и выдает:
- вектор состояния VE, соответствующий погрешностям гибридной системы и получаемый посредством отслеживания отклонений между инерциальными точками позиционирования и скорости PPVI и соответствующими необработанными измерениями MBi,
- вариационно-ковариационную матрицу MHYP погрешности, выполненную на оценке вектора состояния VE,
- гибридную поправку, которая содержит оценку вектора состояния VE.
Описание компоновки и функций фильтра Кальмана и вспомогательных фильтров представлено в патентной заявке WO2008040658, где описан, в частности, способ коррекции, применяемый для блока гибридизации, который корректирует гибридные значения позиционирования и скоростей на основании спутниковых данных. Способ коррекции может корректировать погрешности скорости, связанные с недостатками инерциальных датчиков и с недостатками, влияющими на данные, предоставляемые спутниками, посредством оценки погрешностей на инерциальных положениях PPVI на основании спутниковых данных и путем исключения неисправных спутников, чтобы предоставлять данные с хорошей точностью. Для этого блок гибридизации содержит несколько параллельных фильтров Кальмана, при этом главный фильтр работает на совокупности находящихся в пределах видимости спутниках, а вспомогательные фильтры работают на всех спутниках в пределах видимости, за исключением одного. Эта архитектура позволяет убедиться, что один из вспомогательных фильтров не подвергся влиянию возможного неисправного спутника. Способ коррекции основан на том, что неисправности на одном спутнике не зависят от неисправностей на других спутниках. Он работает, только когда неисправность одного спутника не влияет на работу других спутников. В варианте способ коррекции позволяет корректировать гибридные положения и скорости посредством оценки отклонения между инерциальными положениями и положениями, вычисляемыми на основании спутниковых данных, и компенсировать затем отклонение между значениями в непрерывном режиме.
Вычислительный модуль получает данные гибридной скорости и вариационно-ковариационную матрицу и определяет значения безопасных радиусов гибридной скорости. Этот способ вычисления аналогичен способу, применяемому для вычисления безопасных радиусов положения в патентной заявке WO2008040658, но их вычисляют на основании гибридной скорости, а не на основании гибридного положения. Описанный способ вычисления кратко представлен ниже в применении для вычисления горизонтального безопасного радиуса гибридной скорости. Вычисление вертикального безопасного радиуса гибридной скорости аналогично, и его описание опускается.
При отсутствии неисправности спутника производят оценку вспомогательного промежуточного безопасного радиуса гибридной скорости RPhVHYH0 при предположении, обозначаемом Н0, согласно которому ни одно из необработанных измерений не является ошибочным. Этот промежуточный безопасный радиус напрямую связан с вариацией скорости и с вероятностью Pni того, что эта погрешность превышает безопасный радиус. Измеряемой величине (в данном случае скорости) соответствует коэффициент диагонали вариационно-ковариационной матрицы. Типовое отклонение σ является квадратным корнем из этой вариации, и, следовательно, его выводят из матрицы Р.
Определяют вспомогательный горизонтальный безопасный радиус гибридной скорости RPhVHYH1 при предположении, обозначаемом Н1, согласно которому одно из необработанных измерений MBi (поступающих от спутника i) является ошибочным, при помощи метода максимального разделения (вычисление описано в патентной заявке WO2008040658).
Определяют горизонтальный безопасный радиус гибридной скорости как максимум из вспомогательных горизонтальных безопасных радиусов гибридной скорости RPhVHYH0 и RPhVHYH1.
Определение максимума основано на определении окружности, описанной вокруг доверительного эллипса в горизонтальной плоскости. Доверительный эллипс определяют на основании вариационной-ковариационной матрицы гибридной скорости и искомого значения вероятности. Это вычисление описано в патентной заявке WO2008040658.
Предпочтительно определение вспомогательного горизонтального безопасного радиуса основано на желаемом значении вероятности тревожного сигнала и на желаемом значении вероятности неудачного обнаружения. Предпочтительно определение вспомогательного горизонтального безопасного радиуса гибридной скорости RPhVHYH0 основано на желаемом значении вероятности неудачного обнаружения и на значении вероятности наступления не обнаруженной неисправности спутника.
Глобальная система 1 дополнительно содержит подсистему 3, S, установленную на движущемся объекте, которая применяет способ в соответствии с настоящим изобретением. Для этого она получает данные гибридной скорости VHY и безопасного радиуса гибридной скорости RPVHY. Подсистема 3, S получает также, когда они доступны, данные промежуточного положения PPOS и промежуточного безопасного радиуса RPPOS, связанного с промежуточным положением PPOS.
Безопасные радиусы гибридной скорости RPVHY являются либо горизонтальными, либо вертикальными безопасными радиусами, либо комбинацией горизонтальных и вертикальных безопасных радиусов. В этом последнем случае получению безопасных радиусов гибридной скорости RPVHY предшествует этап получения горизонтальных и/или вертикальных безопасных радиусов и этап вычисления комбинации этих двух радиусов блоком гибридизации или подсистемой. Точно так же промежуточные безопасные радиусы положения являются либо горизонтальными, либо вертикальными безопасными радиусами промежуточного положения, либо комбинацией горизонтальных и вертикальных безопасных радиусов. Выбирают вертикальные безопасные радиусы, если собираются совершить посадку и хотят получить точные измерения положения в вертикальном направлении, горизонтальные безопасные радиусы, если необходимо производить полет в узкой зоне в горизонтальном направлении (например, между двумя горами), комбинации вертикальных и горизонтальных безопасных радиусов, если хотят взвесить значение этих соответствующих радиусов в зависимости от конфигурации полета.
На основании этих данных подсистема 3 определяет положение P(t) движущегося объекта и контролирует достоверность этого положения, вычисляя, по меньшей мере, один безопасный радиус положения RP(t), связанный с положением P(t), для данного уровня достоверности.
Способ в соответствии с настоящим изобретением, применяемый подсистемой 3, S, состоит в следующем: в первоначальный момент t=0 инициализируют первоначальное положение движущегося объекта и безопасный радиус положения RP(t=0) по соответствующим значениям промежуточного положения PPOS(t=0) и промежуточного безопасного радиуса положения RPPOS(t=0). Чтобы начать способ в соответствии с настоящим изобретением, необходимо получить значения положения и безопасного радиуса от устройства промежуточного позиционирования.
Предположим, что известен безопасный радиус положения RP(t-Δt) и связанное с ним положение P(t-Δt) в момент t-Δt, предшествующий данному моменту на интервал времени Δt. Для определения положения движущегося объекта в данный момент t определяют положение, которое связано с наилучшим безопасным радиусом в этот момент.
Для этого определяют поддерживаемое положение PI(t), добавляя к положению P(t) движущегося объекта интеграл гибридной скорости между предыдущим моментом t-Δt и данным моментом t:

Определяют также поддерживаемый безопасный радиус положения RPI(t), связанный с поддерживаемым положением PI(t). Этот радиус получают, добавляя к безопасному радиусу RP(t) предыдущего момента интеграл безопасного радиуса гибридной скорости RPVHY(t) между предыдущим моментом t-Δt и данным моментом t:

После этого, в зависимости от заранее определенного критерия выбора, сравнивают поддерживаемый безопасный радиус положения RPI(t) и промежуточный безопасный радиус положения RPPOS(t).
Предпочтительно критерий выбора состоит в том, что наилучшим безопасным радиусом считают наименьший радиус.
Положение P(t), вычисляемое устройством в соответствии с настоящим изобретением, является наилучшим положением с точки зрения безопасного радиуса. Иначе говоря, это положение, которое имеет наилучший безопасный радиус.
Если информация от устройства промежуточного позиционирования доступна, то положением P(t), предоставляемым устройством в соответствии с настоящим изобретением, является поддерживаемое положение PI(t).
Следует отметить, что гибридная скорость (производная от гибридного положения), предоставляемая блоком 2 гибридизации UI, является очень точной (обычно погрешность скорости составляет несколько см/с), так как, с одной стороны, погрешности в данных скорости, поступающих от спутников, как правило, являются очень незначительными, поскольку погрешность в спутниковом положении меняется очень медленно, с другой стороны, в случае потери спутниковой информации погрешности в гибридных скоростях меняются в худшую сторону очень постепенно, учитывая саму природу инерциальных данных.
Когда информация, поступающая от устройства промежуточного позиционирования, начинает искажаться, безопасный радиус промежуточного положения для данного уровня достоверности увеличивается. При этом говорят, что положение, получаемое от устройства промежуточного позиционирования, является менее качественным с точки зрения безопасного радиуса. Если искажение или потеря информации связана с потерей спутниковых данных, гибридные данные тоже начинают искажаться (но медленно). С другой стороны, если искажение или недоступность связаны с неисправностью устройства промежуточного позиционирования, качество гибридных данных не меняется.
Предположим, что в варианте выполнения, в котором устройство промежуточного позиционирования является устройством улучшения, это устройство улучшения имеет ухудшение качества, связанное с ухудшением качества спутниковых данных, начиная с момента ухудшения качества td. Перед ухудшением положение P(t) и связанный с ним безопасный радиус RP(t) движущегося объекта соответственно равны улучшенному положению PAUG и улучшенному безопасному радиусу RPAUG в этот же момент. Перед ухудшением улучшенный безопасный радиус положения меньше, чем поддерживаемый безопасный радиус положения.
Когда информация, поступающая от устройства улучшения, ухудшается, улучшенный безопасный радиус положения увеличивается в отличие от безопасного радиуса, связанного с гибридной скоростью. При этом положение P(t) становится поддерживаемым положением PI(t), как только улучшенный безопасный радиус положения превысит поддерживаемый безопасный радиус RPI(t). Таким образом, способ согласно первому варианту выполнения изобретения предоставляет измерения положения, безопасный радиус которого, для данного уровня достоверности, увеличивается менее быстро, чем безопасный радиус улучшенного положения, после ухудшения устройства улучшения.
Предположим также, что информация, поступающая от спутников, потеряна. Улучшенные безопасные радиусы положения оказываются недоступными. Положение, вычисляемое при помощи способа в соответствии с настоящим изобретением, является поддерживаемым положением.
Следовательно, когда устройство промежуточного позиционирования предоставляет лучшую информацию положения, чем поддерживаемое положение, положение, вычисляемое при помощи способа в соответствии с настоящим изобретением, является промежуточным положением, а как только устройство промежуточного позиционирования предоставляет менее качественную информацию, чем поддерживаемое положение, с точки зрения безопасного радиуса, вычисляемое положение становится поддерживаемым положением.
Контроль достоверности положения P(t), вычисляемого при помощи способа в соответствии с настоящим изобретением, осуществляют посредством вычисления, по меньшей мере, одного безопасного радиуса RP(t), связанного с положением. Поскольку наилучшим положением является положение, которое имеет наилучший безопасный радиус, способ в соответствии с настоящим изобретением автоматически вычисляет безопасный радиус.
Можно вычислять дополнительные безопасные радиусы на основании безопасных радиусов, которые не были использованы подсистемой 3. Если наилучшим положением является промежуточное положение и оно было определено на основании вертикальных безопасных радиусов, то горизонтальным безопасным радиусом является промежуточный горизонтальный безопасный радиус, поступающий в подсистему S от устройства промежуточного позиционирования. Если наилучшим положением является поддерживаемое положение и оно было определено при помощи способа в соответствии с настоящим изобретением, то горизонтальным безопасным радиусом является поддерживаемый горизонтальный безопасный радиус. Поддерживаемый горизонтальный безопасный радиус вычисляют путем добавления к горизонтальному безопасному радиусу предыдущего момента интеграла горизонтального безопасного радиуса скорости между предыдущим моментом и данным моментом.
Применение способа в соответствии с настоящим изобретением не требует изменения блоков гибридизации или устройств промежуточного позиционирования. Для применения способа в соответствии с настоящим изобретением нет необходимости в специально предусмотренном для него блоке гибридизации. Добавляют только подсистему, применяющую способ в соответствии с настоящим изобретением, к классическому блоку гибридизации и к известному устройству промежуточного позиционирования.
Способ в соответствии с настоящим изобретением представляет особый интерес, когда устройство промежуточного позиционирования является устройством улучшения и когда гибридный блок применяет способ коррекции, который основан на независимости неисправностей, появляющихся на разных спутниках. В этом случае на входе гибридного устройства невозможно использовать улучшенные измерения GNSS, так как улучшенные измерения взаимосвязаны между собой. Действительно, когда в системе улучшения появляется сбой (например, если она основана на положении опорных станций, значение которого является ошибочным, или если во время передачи данных появляется ошибка, и т.д.), этот сбой отражается на поправках, вводимых в сигналы, передаваемые различными спутниками. Применяя способ в соответствии с настоящим изобретением можно, не используя улучшенные данные на входе блока гибридизации, использовать преимущества как устройства улучшения, так и гибридного устройства.
Кроме летательного аппарата, движущимся объектом может быть, например, судно или наземное транспортное средство.
Герметичное направляющее устройство вращения
Устройство измерения дефектов устройства формирования изображений с двумя оптоэлектронными датчиками
Сборная конструкция строительной панели для улучшения сопротивления конструкции термическому расширению и способ ее изготовления
Устройство радиального усиления мощности с компенсацией фазового разброса усилительных каналов
Способ активной деформации аэродинамического профиля
Планарный излучающий элемент с дуальной поляризацией и антенная решетка, содержащая такой излучающий элемент
Способ позиционирования зеркал трехосного лазерного гирометра, в частности, при запуске лазерного гирометра
Сеть и способ расчета ионосферных коррекций
Многополосное устройство для соединения и разделения передачи и приема с широкой частотной полосой типа омт для сверхвысокочастотных телекоммуникационных антенн
Конструкция оптической накачки
Герметичное направляющее устройство вращения
Устройство измерения дефектов устройства формирования изображений с двумя оптоэлектронными датчиками
Сборная конструкция строительной панели для улучшения сопротивления конструкции термическому расширению и способ ее изготовления
Распределенная архитектура для радионавигационного оборудования
Устройство радиального усиления мощности с компенсацией фазового разброса усилительных каналов
Способ активной деформации аэродинамического профиля
Планарный излучающий элемент с дуальной поляризацией и антенная решетка, содержащая такой излучающий элемент
Способ позиционирования зеркал трехосного лазерного гирометра, в частности, при запуске лазерного гирометра
Сеть и способ расчета ионосферных коррекций
Многополосное устройство для соединения и разделения передачи и приема с широкой частотной полосой типа омт для сверхвысокочастотных телекоммуникационных антенн

