Результат интеллектуальной деятельности: СПОСОБ ФУНКЦИОНИРОВАНИЯ ТОПОПРИВЯЗЧИКА В СОСТАВЕ АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ ВОЙСКАМИ
Вид РИД
Изобретение
Изобретение относится к военной технике, а именно к способам функционирования мобильных комплексов навигации и топопривязки в условиях взаимодействия в автоматизированной системе управления войсками (АСУВ), и может быть использовано для решения задач топогеодезической подготовки боевых действий Сухопутных войск.
Известен способ функционирования мобильного комплекса навигации и топопривязки в условиях боевого применения (см. патент RU №2436042 С1, МПК G01C 21/00, опубл.10.12.11 г., Бюл. №34), принятый за прототип. Способ функционирования мобильного комплекса навигации и топопривязки в условиях боевого применения включает в себя выполнение операции подготовки к выполнению боевой (учебной) задачи, проведение ориентирования на начальной точке - определение дирекционного угла и координат начальной точки, архивирование полученных на привязываемых точках топогеодезических данных, перемещение к конечной (привязываемой) точке, нанесение маршрута движения и дополнительных ориентиров на топографическую карту, определение погрешности координат конечной (привязываемой) точки, проведение топогеодезической привязки ориентиров на местности и огневых позиций орудий или ракетных установок, доклад командованию и передачу результатов привязки обслуживаемым подразделениям. Подготовка комплекса к выполнению боевой (учебной) задачи заключается в приведении навигационной аппаратуры в автоматизированный режим «Навигация», проведение ориентирования на начальной точке заключается в выборе первой задачи режима навигации - задачи «Начальная установка», в ходе которой определяются используемые источники навигационной информации об азимуте а и начальных значениях координат X, Y, Н: инерциальная навигационная система (ИНС) или аппаратура спутниковой навигации (АСН), или обобщенные данные об совместном использовании ИНС и АСН, или данные, определенные с помощью автономных приборов, архивирование топогеодезических данных в процессе работы комплекса производится автоматически в виде электронных каталогов (списков), перемещение комплекса к конечной (привязываемой) точке осуществляется после выполнения предыдущей задачи и появления оперативного сообщения о готовности к выполнению второй задачи режима навигации - задачи «Работа» на маршруте, при выполнении второй задачи навигации в реальном режиме времени на цифровой карте местности (ЦКМ) автоматически отображаются значения текущих навигационных параметров и данные местоположения, после перехода комплекса к выполнению второй задачи навигации осуществляется параллельное выполнение следующего автоматизированного режима работы комплекса - режима «Работа с ЦКМ», основной задачей которого является задача «Прокладка маршрута», которая выполняется при помощи активизации одной из трех подзадач: «Выбор маршрута по текущим координатам», «Выбор маршрута по вводимым координатам», «Выбор маршрута из списка» - предварительно подготовленному электронному каталогу (списку) навигационных данных, определение погрешности азимута и координат места комплекса осуществляется автоматически за счет интегрированной обработки навигационной информации, поступающей от ИНС и АСН, передача результатов привязки производится по автоматизированному каналу информационного обмена системы связи и передачи данных (ССПД) с пунктами управления вышестоящих и взаимодействующих формирований с учетом приоритетов абонентов, как во время движения по маршруту, так и на остановке на привязываемых точках, по завершении топогеодезической привязки непосредственно на комплексе выполняется печатное изготовление необходимого количества топографических карт с нанесенной на них топогеодезической информацией.
Недостатками способа, взятого за прототип, являются:
- низкий уровень возможностей по передаче полученных данных по радиоканалу обслуживаемым подразделениям;
- низкая степень управляемости и слаженности при взаимодействии с потребителями топогеодезической информации;
- длительное время обработки информации и, соответственно, всего цикла боевого управления;
- несовершенство программных средств и аппаратных средств, систем связи комплекса, приводящее к затруднениям функционирования комплекса в условиях АСУВ.
Предлагаемым изобретением решается задача по повышению эффективности использования топопривязчиков в условиях функционирования в составе автоматизированной системы управления войсками.
Технический результат, получаемый при осуществлении изобретения, заключается в формировании способа функционирования топопривязчика в составе автоматизированной системы управления войсками, обеспечивающего в автоматизированном режиме определение и передачу объектам АСУВ топогеодезической и корректирующей информации по каналам системы связи и передачи данных.
Указанный технический результат достигается тем, что в предлагаемом способе функционирования топопривязчика в составе автоматизированной системы управления войсками (АСУВ), включающем в себя операции подготовки к выполнению боевой (учебной) задачи, архивирование полученных на привязываемых точках топогеодезических данных, нанесение маршрута движения и дополнительных ориентиров на цифровую карту местности (ЦКМ), автоматизированное определение погрешности координат привязываемой точки, проведение топогеодезической привязки ориентиров на местности и огневых позиций орудий или ракетных установок, передачу результатов привязки по автоматизированному каналу информационного обмена системы связи и передачи данных (ССПД) пунктам управления вышестоящих и взаимодействующих формирований, печатное изготовление необходимого количества топографических карт, новым является то, что топопривязчик включен в систему информационного обмена АСУВ и связан с автоматизированными рабочими местами (АРМ) объектов АСУВ, информационный обмен осуществляется по унифицированному протоколу обмена объектов АСУВ высокоточной навигационно-временной информацией, а в режиме контрольно-корректирующей станции - сформированными дифференциальными поправками, полученными в результате анализа качества навигационных полей космических навигационных систем (КНС) ГЛОНАСС и GPS, в связи с этим взаимодействие ССПД топопривязчика со средствами связи объектов АСУВ осуществляется за счет применения однотипных технических средств, обеспечивающих их техническую и информационную совместимость путем автоматизированного взаимообмена сообщениями, построенными по единой структуре с использованием единых правил формализации и единых оперативно-тактических понятий, в соответствии с планом распределения информации, на основе которого осуществляется передача информации по сети от абонента-источника до абонента-получателя, цифровая топогеодезическая информация представлена в виде цифровой картографической базы данных, содержащей информацию о местности, координаты точек локальной геодезической сети, созданной топопривязчиком, данные об оперативной обстановке, наносимые должностными лицами органов управления АСУВ, оперативную базу данных о реальном маршруте движения и взаимном расположении элементов боевого порядка, работа топопривязчика в режиме контрольно-корректирующей станции осуществляется в двух основных режимах: режиме оперативной передачи информации и режиме накопления и постобработки накопленных данных от космических аппаратов (КА) КНС ГЛОНАСС и GPS для последующей дифференциальной коррекции.
Включение топопривязчика в систему информационного обмена АСУВ и обеспечение его связи с автоматизированными рабочими местами (АРМ) объектов АСУВ позволяет:
- в автоматизированном режиме с достаточной пропускной способностью обеспечить передачу объектам АСУВ (командным пунктам, пунктам управления огневым поражением, техническим средствам разведки и наблюдения) достоверной топогеодезической и корректирующей информации;
- в более полном объеме реализовать возможности штабов различного оперативного уровня, войсковых формирований, боевых комплексов, средств управления и разведки;
- обеспечить передачу информации на различные уровни АСУВ (бригада, батальон, рота, взвод);
- сократить цикл боевого управления в части топогеодезической подготовки для ведения боевых действий;
- создавать на электронных картах местности, имеющихся на автоматизированных рабочих местах объектов АСУВ, специальные геодезические сети необходимой плотности;
- повысить точность средств космической навигации, используемых в позиционном районе;
- повысить управляемость и эффективность использования топопривязчика.
Осуществление информационного обмена по унифицированному протоколу позволяет:
- максимальное удовлетворение требований Сухопутных войск, предъявляемых к обеспечивающим средствам;
- повысить точность, оперативность распределения и обмена информации, степень автоматизации функционирования в составе АСУВ.
Осуществление взаимодействия ССПД топопривязчика со средствами связи объектов АСУВ за счет применения однотипных технических средств, обеспечивающих их техническую и информационную совместимость путем автоматизированного взаимообмена сообщениями, построенными по единой структуре с использованием единых правил формализации и единых оперативно-тактических понятий, в соответствии с планом распределения информации, на основе которого осуществляется передача информации по сети от абонента-источника до абонента-получателя, позволяет:
- обеспечить эффективный обмен информацией по каналам передачи данных между топопривязчиком и внешними корреспондентами на требуемых дальностях;
- обеспечить максимальную пропускную способность ССПД и требуемые вероятностно-ременные характеристики;
- повысить управляемость, живучесть и безопасность функционирования ССПД.
Представление цифровой топогеодезической информации в виде цифровой картографической базы данных, содержащей информацию о местности, координаты точек локальной геодезической сети, созданной топопривязчиком, данные об оперативной обстановке, наносимые должностными лицами органов управления АСУВ, оперативную базу данных о реальном маршруте движения и взаимном расположении элементов боевого порядка, позволяет:
- получить наиболее удобное средство представления топогеодезической информации;
- производить в наиболее короткие сроки, по сравнению с использованием обычных карт, оценку местности и обстановки, анализ проходимости дорог на маршруте;
- обеспечить быструю смену масштаба карты;
- иметь сформированную цифровую картографическую базу данных для всего района работ;
- отображать современное состояние местности, ее типичные черты и характерные особенности;
- обеспечить с соответствующей масштабу точностью возможность определения координат, количественных и качественных характеристик объектов местности;
- реализовать систему условных знаков и оформление, позволяющее должностным лицам наносить данные оперативной обстановки.
Осуществление работы топопривязчика в режиме контрольно-корректирующей станции в двух основных режимах: режиме оперативной передачи информации и режиме накопления и постобработки накопленных данных от космических аппаратов (КА) КНС ГЛО-НАСС и GPS для последующей дифференциальной коррекции позволяет:
- существенно повысить точность позиционирования как собственно топопривязчика, так и всех объектов АСУВ, оснащенных КНС ГЛОНАСС и GPS;
- отказаться от установки на объектах АСУВ собственных локальных контрольно-корректирующих станций.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
Сущность изобретения поясняется чертежом, где показана схема функционирования топопривязчика в составе АСУВ.
Способ функционирования топопривязчика в составе автоматизированной системы управления войсками (АСУВ) заключается в следующем.
Применение АСУВ обеспечивает сокращение цикла боевого управления с учетом периода подготовки к бою по сравнению с «ручным способом». Топогеодезическая подготовка боевых действий является неотъемлемой частью общего периода подготовки. Успешное ведение боевых действий в значительной степени зависит от качества топогеодезического обеспечения в районе вооруженного конфликта.
Включение топопривязчика 1 в систему информационного обмена АСУВ позволяет войскам оперативно получать достоверную топогеодезическую информацию о местности за счет оперативного изготовления в полевых условиях необходимых документов о местности; перехода к цифровым технологиям картографического производства; создания баз данных, предназначенных для использования в АСУВ при планировании боевых действий.
Топопривязчик (ТП) 1 в позиционном районе выполняет задачи по назначению: рекогносцировка маршрута и нанесение дорог на карту, определение топогеодезических данных, дирекционных углов ориентирных и эталонных направлений, топогеодезическая привязка огневых и стартовых позиций (ОСП) 2, постов и пунктов наблюдения (ППН) 3, создание артиллерийских топогеодезических сетей.
В общем виде АСУВ имеет следующие основные элементы: командный пункт (КП) 4, мобильный пункт боевого управления (МПБУ) 5, пункт управления огневым поражением (ПУОП) 6, пункт управления ПВО (ПУ ПВО) 7, информационно-аналитический центр (ИАЦ) 8.
КП 4 является основным органом управления, с которого командир управляет воинскими частями и подразделениями при подготовке и в ходе боя. Совместно с ИАЦ 8 КП 4 анализирует необходимую информацию в интересах командира, готовит донесения вышестоящему командованию, планирует предстоящие боевые действия. В КП 4 размещены АРМ 9, оборудованные средствами связи (СС) 10.
МПБУ 5 является передовым элементом системы управления и предназначен для оперативного управления войсками в ходе боя в реальном режиме времени. В МПБУ 5 размещены АРМ 11, оборудованные СС 12.
ПУОП 6 является органом управления всеми ОСП 2, участвующими в огневом поражении противника. В ПУОП 6 размещены АРМ 13, оборудованные СС 14.
ПУ ПВО 7 предназначен для управления подавлением воздушных целей противника, обнаруженных в позиционном районе. В ПУ ПВО 7 размещены АРМ 15, оборудованные СС 16.
ИАЦ 8 предназначен для сбора и обработки информации о противнике, своих войсках, условиях ведения боевых действий, в т.ч. навигационно-временной и корректирующей информации, поступающей с ТП 1, ее распределения по предназначению. В ИАЦ 8 размещены АРМ 17, оборудованные СС 18.
АРМ 9, 11, 13, 15 и 17 оборудованы средствами отображения оперативно-тактической информации на фоне цифровой карты местности.
Информационный обмен между ТП 1 и объектами АСУВ осуществляется по унифицированному протоколу обмена, применение которого позволяет построить в рамках АСУВ автоматизированные навигационно-информационные комплексы. К основным группам аппаратуры и устройств объектов АСУВ, требующим обмена навигационной информацией относятся АРМ 9, 11, 13, 15 и 17, бортовые навигационные комплексы, устройства и системы синхронизации шкал времени. В протоколе обмена унифицированы: логика и приоритеты формирования кадров, типы кадров управления и данных, вид представления информации, соответствие кадров типам потребителей, тип интерфейса (RS-232, RS-422). Унифицированный протокол обеспечивает сопряжение (конструктивное, электрическое и логическое) управляющей ЭВМ объекта, в частности, ТП 1, с навигационным оборудованием любого типа, поддерживающего данный протокол, размещенным на объектах АСУВ.
ССПД 19 ТП 1, входящая в состав АРМ 20, обеспечивает должностных лиц ТП1 устойчивой и надежной связью с сопрягаемыми объектами АСУВ. Требования к ССПД 19 определяются информационными связями, расстояниями между машинами группировки взаимодействующих структур АСУВ. Пропускная способность ССПД 19 обеспечивает своевременное доведение до объектов АСУВ команд, сигналов, сообщений установленных категорий срочности, получение докладов, донесений о выполнении поставленных задач, обмен навигационными данными.
Эффективное взаимодействие между сопрягаемыми с ТП 1 объектами возможно только при их технической и информационной совместимости. Под совместимостью ТП 1 с сопрягаемыми объектами АСУВ следует понимать его способность взаимодействовать в автоматизированном режиме с объектами АСУВ при совместном функционировании.
Техническая совместимость обеспечивается применением однотипных или совместимых по техническим характеристикам средств связи, использованием одинаковых режимов работы.
Информационная совместимость обеспечивается путем взаимообмена сообщениями, построенными по единой структуре с использованием единых правил формализации и единых оперативно-тактических понятий.
Процесс обмена сообщениями между сопрягаемыми изделиями конкретизируется правилами взаимодействия определенных уровней сопрягаемых изделий и рассматривается в протоколах организационной, информационной и технической совместимости ТП 1 с сопрягаемыми объектами АСУВ.
Одним из основных вопросов, который решается при организации ССПД 19 ТП 1, является разработка плана распределения информации (разработка адресной и маршрутно-адресной документации), на основе которого осуществляется передача информации.
Вследствие нестационарного характера информационного трафика, приводящего к перегрузке отдельных направлений ССПД 19, требуется приводить план распределения информации к оптимальному, обеспечивающему максимальную пропускную способность и требуемые вероятностно-временные характеристики. Потому в процессе работы ССПД 19 план распределения информации корректируется на основе знания ситуации, возникающей в ССПД 19. Возможность адаптироваться к постоянно изменяющимся условиям функционирования, в том числе вызванным активным противодействием противника, позволяет существенно улучшить управляемость и живучесть ССПД 19.
Цифровая топогеодезическая информация представлена в виде цифровой картографической базы данных, содержащей информацию о местности, координаты точек локальной геодезической сети, созданной топопривязчиком, данные об оперативной обстановке, наносимые должностными лицами органов управления АСУВ, оперативную базу данных о реальном маршруте движения и взаимном расположении элементов боевого порядка.
Процедуры загрузки и ведения такой системы баз данных включают:
- загрузку номенклатурных листов цифровых карт местности;
- «склейку» смежных номенклатурных листов - формирование района работ;
- загрузку данных об оперативной обстановке, в том числе топогеодезических данных, полученных с помощью ТП 1.
Работа ТП 1 в режиме контрольно-корректирующей станции осуществляется в двух основных режимах: режиме оперативной передачи информации и режиме постобработки накопленных данных от космических аппаратов (КА) КНС ГЛОНАСС и GPS для последующей дифференциальной коррекции.
Метод дифференциальной коррекции, с помощью которого достигается более высокая точность позиционирования, позволяет определить уточненные навигационные и временные данные непосредственно на месте измерения. Для этого приемник КНС ГЛОНАСС и GPS ТП 1 должен кроме сигналов спутников принимать также корректирующую информацию от контрольно-корректирующей станции.
Метод постобработки основан на накоплении данных для последующей дифференциальной коррекции на контрольно-корректирующей станции, которая является в данном случае базовой для всего комплекса навигационных средств объектов АСУП, что позволяет отказаться от установки на объектах АСУВ своей локальной «базы» и сократить стоимость комплекта спутниковой аппаратуры, устанавливаемого на объектах.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, обеспечивающего в автоматизированном режиме определение и передачу объектам АСУВ топогеодезической и корректирующей информации по каналам системы связи и передачи данных.
Способ функционирования топопривязчика в составе автоматизированной системы управления войсками, включающий в себя операции подготовки к выполнению боевой (учебной) задачи, архивирование полученных на привязываемых точках топогеодезических данных, нанесение маршрута движения и дополнительных ориентиров на цифровую карту местности (ЦКМ), автоматизированное определение погрешности координат привязываемой точки, проведение топогеодезической привязки ориентиров на местности и огневых позиций орудий или ракетных установок, передачу результатов привязки по автоматизированному каналу информационного обмена системы связи и передачи данных (ССПД) пунктам управления вышестоящих и взаимодействующих формирований, печатное изготовление необходимого количества топографических карт, отличающийся тем, что топопривязчик включен в систему информационного обмена АСУВ и связан с автоматизированными рабочими местами (АРМ) объектов АСУВ, информационный обмен осуществляется по унифицированному протоколу обмена объектов АСУВ высокоточной навигационно-временной информацией, а в режиме контрольно-корректирующей станции - сформированными дифференциальными поправками, полученными в результате анализа качества навигационных полей космических навигационных систем (КНС) ГЛОНАСС и GPS, в связи с этим взаимодействие ССПД топопривязчика со средствами связи объектов АСУВ осуществляется за счет применения однотипных технических средств, обеспечивающих их техническую и информационную совместимость путем автоматизированного взаимообмена сообщениями, построенными по единой структуре с использованием единых правил формализации и единых оперативно-тактических понятий, в соответствии с планом распределения информации, на основе которого осуществляется передача информации по сети от абонента-источника до абонента-получателя, цифровая топогеодезическая информация представлена в виде цифровой картографической базы данных, содержащей информацию о местности, координаты точек локальной геодезической сети, созданной топопривязчиком, данные об оперативной обстановке, наносимые должностными лицами органов управления АСУВ, оперативную базу данных о реальном маршруте движения и взаимном расположении элементов боевого порядка, работа топопривязчика в режиме контрольно-корректирующей станции осуществляется в двух основных режимах: в режиме оперативной передачи информации и в режиме постобработки накопленных данных от космических аппаратов (КА) КНС ГЛОНАСС и GPS для последующей дифференциальной коррекции.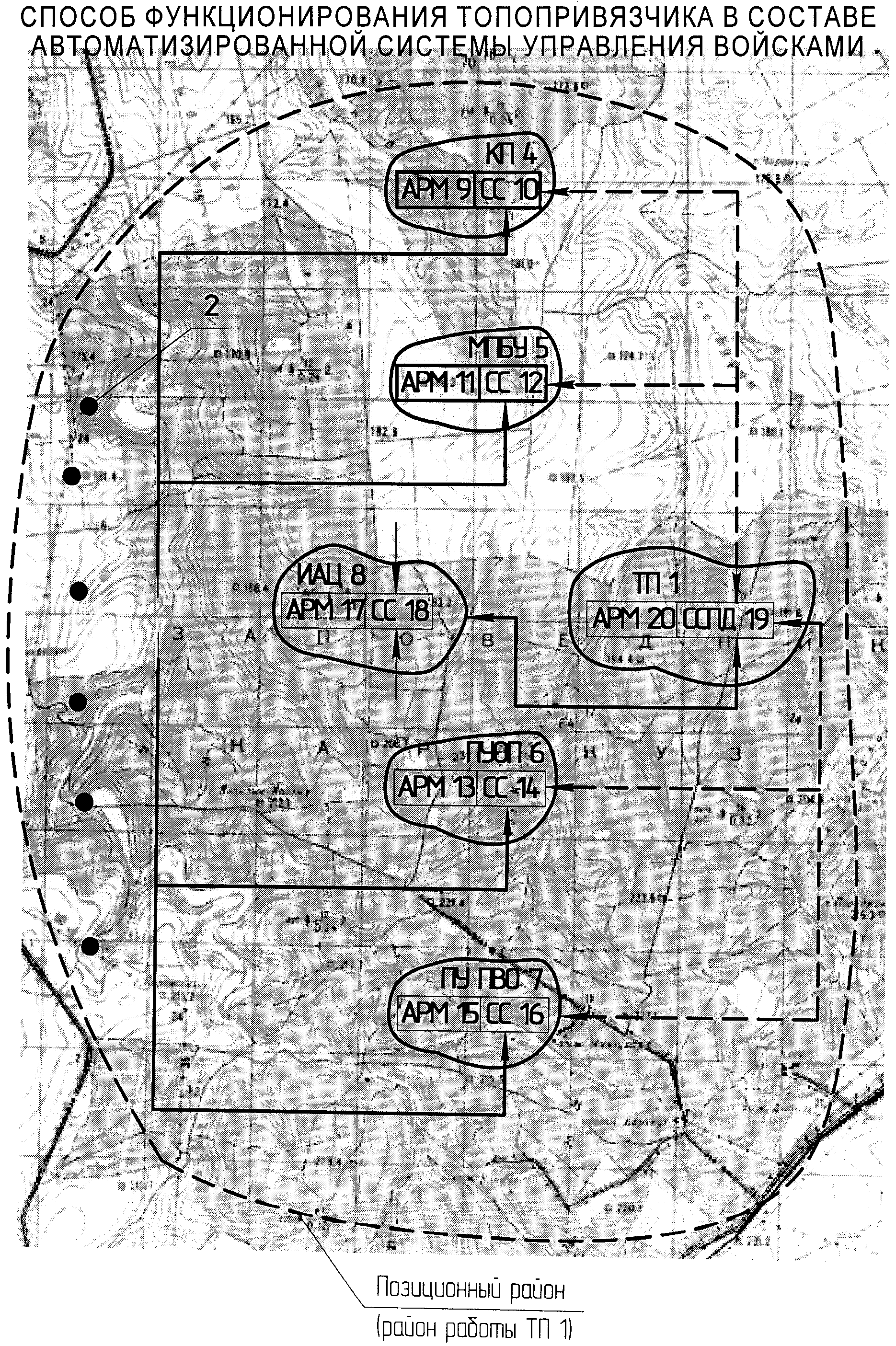
Способ термообработки пенька ствола автоматического стрелкового оружия
Способ стабилизации гальванического хромового покрытия стволов автоматического стрелкового оружия и шахтная печь сопротивления для его реализации
Способ формирования режима работы с цифровыми картами местности
Способ контроля функционирования топопривязчика
Программно-аппаратный комплекс
Кулачковый механизм с кинематическим замыканием и способ местной закалки роликового паза кулачка
Способ определения угла поворота мобильного робототехнического комплекса при преодолении препятствий
Механизм образования пакета для брикета правильной геометрической формы
Поворотная пусковая установка
Пулемет
Способ термообработки пенька ствола автоматического стрелкового оружия
Способ стабилизации гальванического хромового покрытия стволов автоматического стрелкового оружия и шахтная печь сопротивления для его реализации
Способ формирования режима работы с цифровыми картами местности
Способ контроля функционирования топопривязчика
Программно-аппаратный комплекс
Кулачковый механизм с кинематическим замыканием и способ местной закалки роликового паза кулачка
Способ определения угла поворота мобильного робототехнического комплекса при преодолении препятствий
Механизм образования пакета для брикета правильной геометрической формы
Поворотная пусковая установка
Пулемет

