Результат интеллектуальной деятельности: СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к области систем автоматического управления, в частности к технике формирования управляющих сигналов, и может найти применение в следящих системах автоматического управления и регулирования с люфтом в механической передаче.
Известен способ компенсации люфта в механической передаче, заключающийся в суммировании сигнала управления с сигналом коррекции, который формируют путем преобразования сигнала, пропорционального текущему значению люфта, в сигнал с тем же знаком и с постоянной амплитудой, равной полузоне люфта (Авторское свидетельство № 531127, кл. G05B 05/01// Житков В.Б., Лакота Н.А. и др. Способ компенсации люфта в механической передаче. Заявлено 24.07.76. Заявка 2046992/24, опубл. 05.10.76, БИ № 37).
Недостатком данного способа является то, что точность компенсации люфта существенно зависит от точности установки коэффициента пропорциональности между текущим значением люфта и сигналом коррекции. Кроме того, этот способ коррекции, обеспечивая устойчивую работу разомкнутой системы, приводит обычно к значительному ухудшению точностных и динамических характеристик скорректированной следящей системы.
Известен способ автоматического управления, заключающийся в суммировании сигнала ошибки с импульсным сигналом коррекции, который формируют в момент наличия люфта путем вычитания текущего значения люфта из сигнала, равного значению полузоны люфта и имеющего знак, совпадающий со знаком сигнала ошибки (Патент № 2114455, МКИ6 G05B 11/01, 5/01 // Б.В.Сухинин, Ю.Г.Нечепуренко, В.ИЛовчаков, В.В.Сурков. Способ автоматического управления в системе с люфтом и следящая система для его осуществления. Опубликовано 27.06.98. Бюллетень № 18).
Однако данный способ имеет низкие значения точностных и динамических характеристик, так как при прохождении люфта в системах порядка второго и выше появляются автоколебания, что приводит к увеличению погрешности слежения, появлению ударов в механической передаче и снижению точности отработки управляющего воздействия.
Известна следящая система с люфтом, содержащая последовательно соединенные измеритель рассогласования сигнала задания и сигнала единичной главной обратной связи, первый сумматор, регулятор, двигатель с датчиком выходной координаты, нелинейное звено типа "люфт" и объект управления с датчиком выходной координаты, выход которого соединен с вычитающим входом измерителя рассогласования, второй сумматор, один вход которого связан с выходом датчика выходной координаты двигателя, а второй вычитающий вход связан с выходом датчика выходной координаты объекта управления, выход второго сумматора связан с первым вычитающим входом третьего сумматора, второй суммирующий вход которого соединен с выходом релейного элемента, вход которого соединен с выходом измерителя рассогласования, выход третьего сумматора соединен со вторым входом первого сумматора (Патент № 2114455, МКИ6 G05B 11/01, 5/01. // Б.В.Сухинин, Ю.Г.Нечепуренко, В.И.Ловчаков, В.В.Сурков. Способ автоматического управления в системе с люфтом и следящая система для его осуществления. Опубликовано 27.06.98. Бюллетень 18).
Однако данное устройство не обеспечивает требуемой точности и динамических характеристик следящей системы с люфтом из-за погрешности установки коэффициента, равного полузоне люфта.
Техническим результатом настоящего изобретения является повышение точности компенсации люфта и улучшение динамических характеристик следящей системы с люфтом путем добавления сигнала коррекции, формируемого инвариантной связью по управляющему воздействию с переменной структурой.
Технический результат достигается тем, что в способе автоматического управления в системе с люфтом сигнал на выходе регулятора положения суммируется с сигналом коррекции, формируемым инвариантной связью по управляющему воздействию с переменной структурой.
Данный способ может быть использован в любой следящей системе с люфтом для управления двигателями различного типа.
Предлагаемый способ реализуется в следящей системе с люфтом, содержащей измеритель рассогласования сигнала задания и сигнала единичной главной обратной связи, последовательно соединенные регулятор положения, сумматор, замкнутый контур скорости, редуктор, нелинейное звено типа «люфт» и объект управления с датчиком выходной координаты, отличающаяся тем, что в систему дополнительно введена инвариантная связь по управляющему воздействию с переменной структурой, изменяемой при наличии управляемых импульсов, создаваемых формирователем импульсов в момент реверса двигателя.
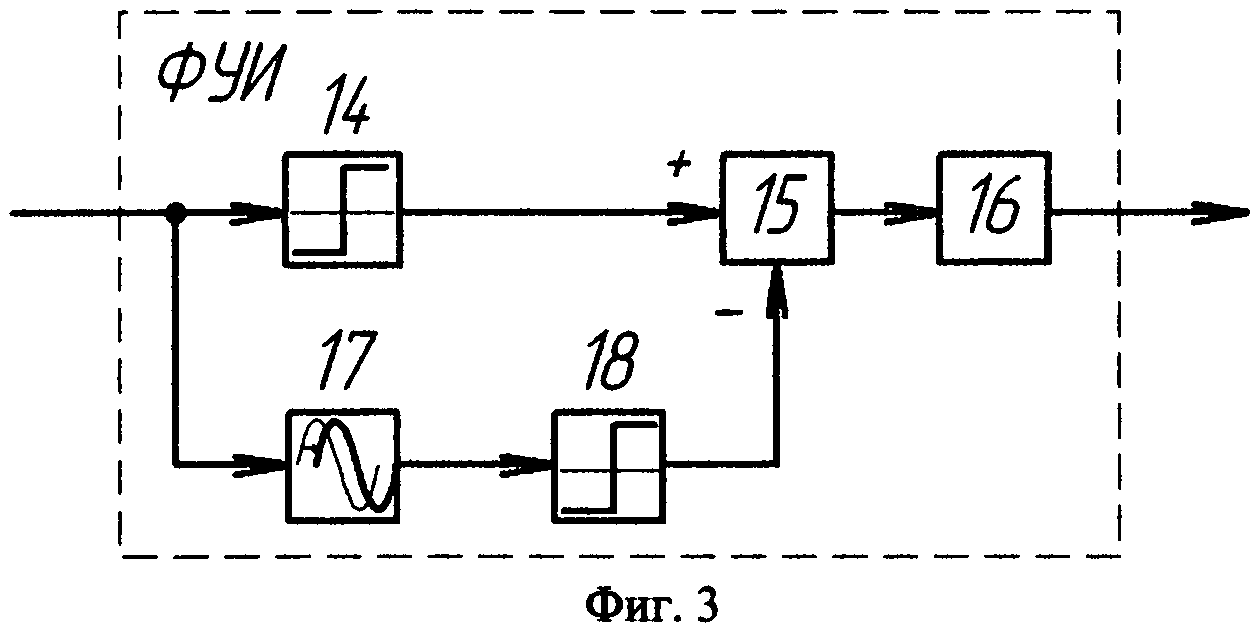
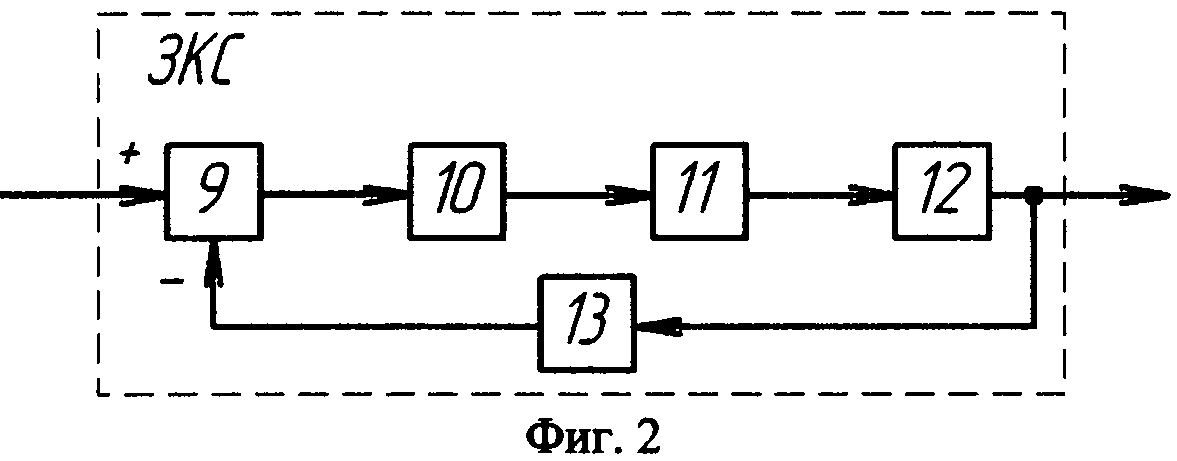
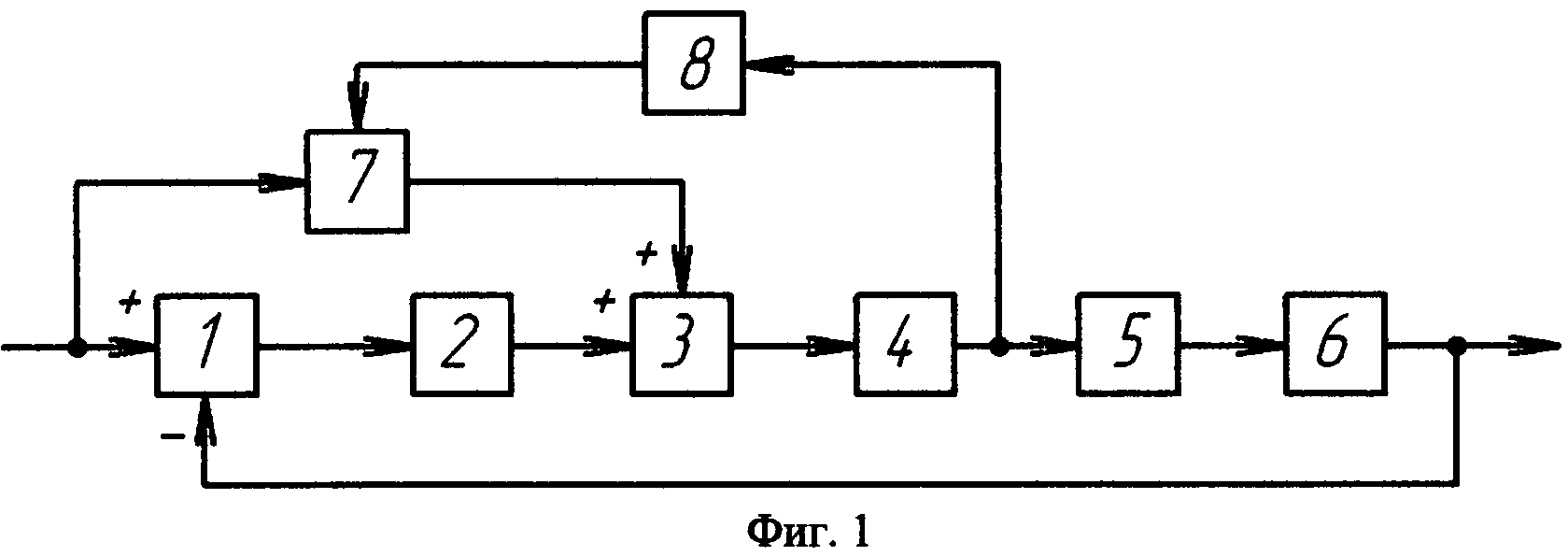
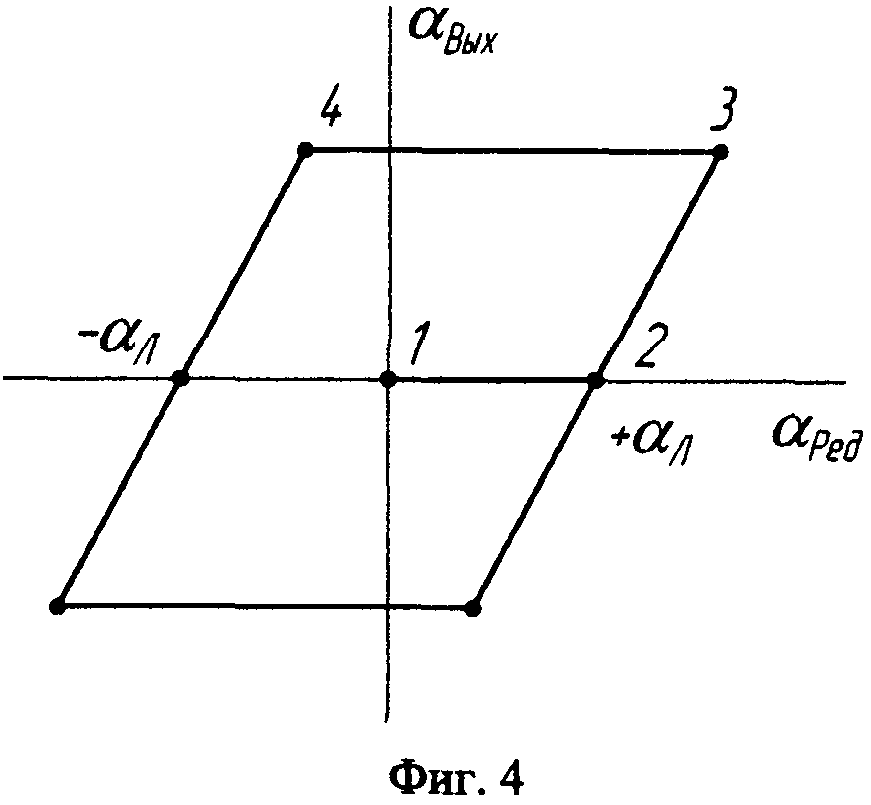
Сущность изобретения поясняется чертежами, где на фиг.1 представлена структурная схема следящей системы, реализующая способ автоматического управления объектом с люфтом; на фиг.2 - структурная схема замкнутого контура скорости; на фиг.3 - структурная схема формирователя импульсов; на фиг.4 - характеристика нелинейного звена типа "люфт"; на фиг.5 приведены временные диаграммы работы следящей системы с люфтом, где:
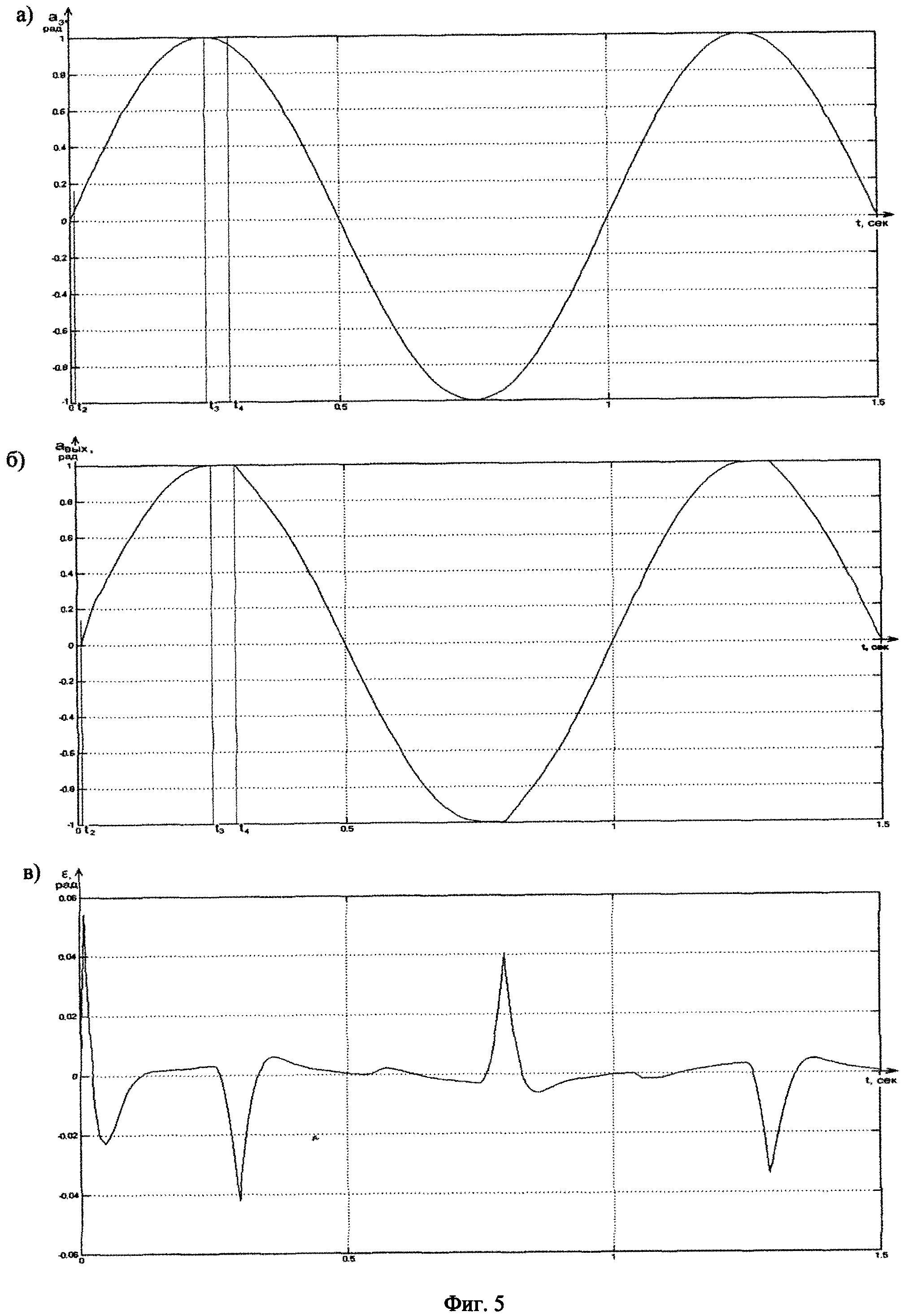
а - диаграмма кривой задающего воздействия αз(t);
б - диаграмма кривой сигнала объекта управления с датчиком выходной координаты αвых(t);
в - диаграмма сигнала ошибки ε(t) с выхода измерителя рассогласования сигнала задания и сигнала единичной главной обратной связи;
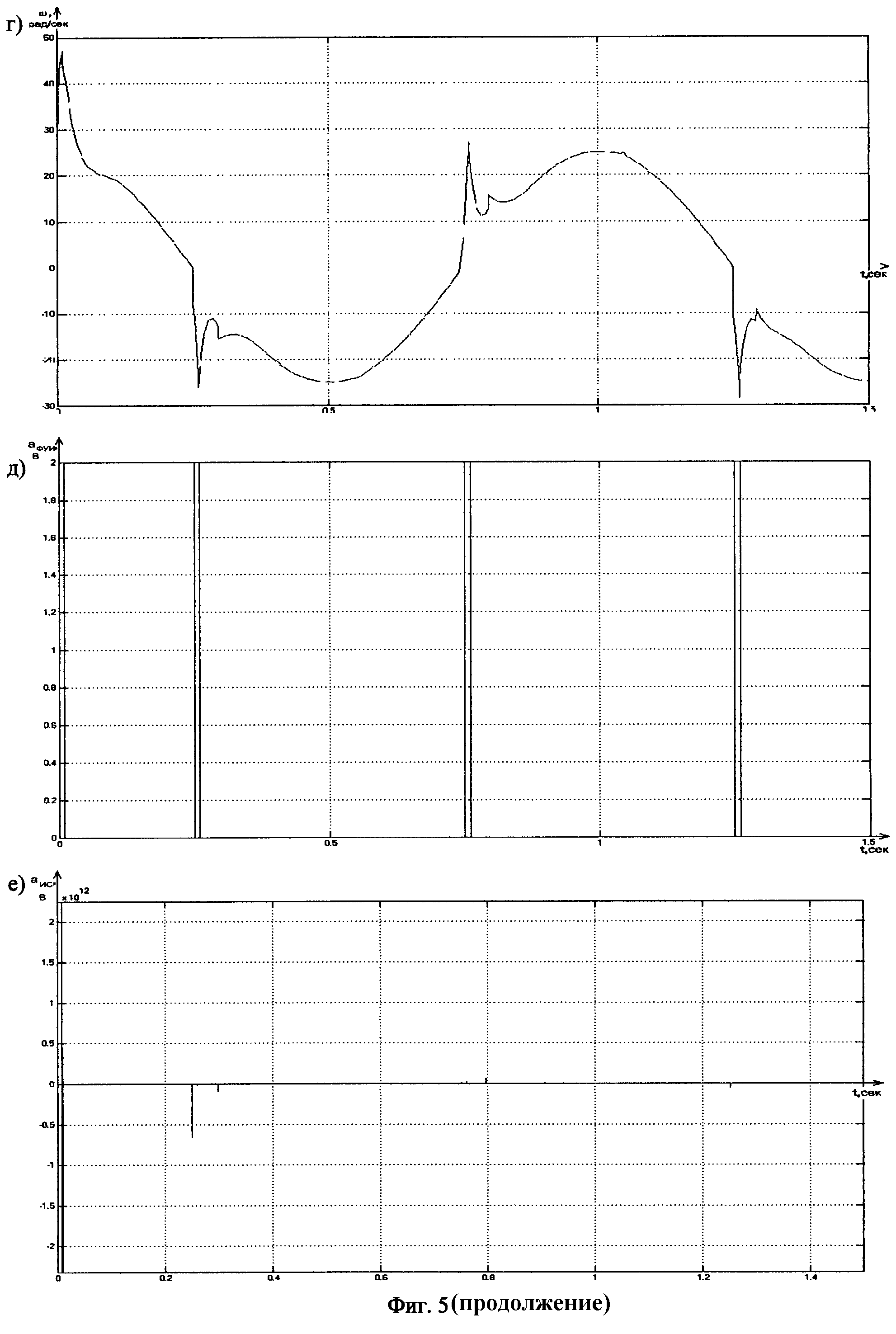
г - диаграмма изменения скорости вращения электродвигателя ω(t);
д - диаграмма кривой сигнала с выхода формирователя управляющих импульсов αФУИ(t);
е - диаграмма кривой сигнала с выхода инвариантной связи по управляющему воздействию с переменной структурой αИС(t);
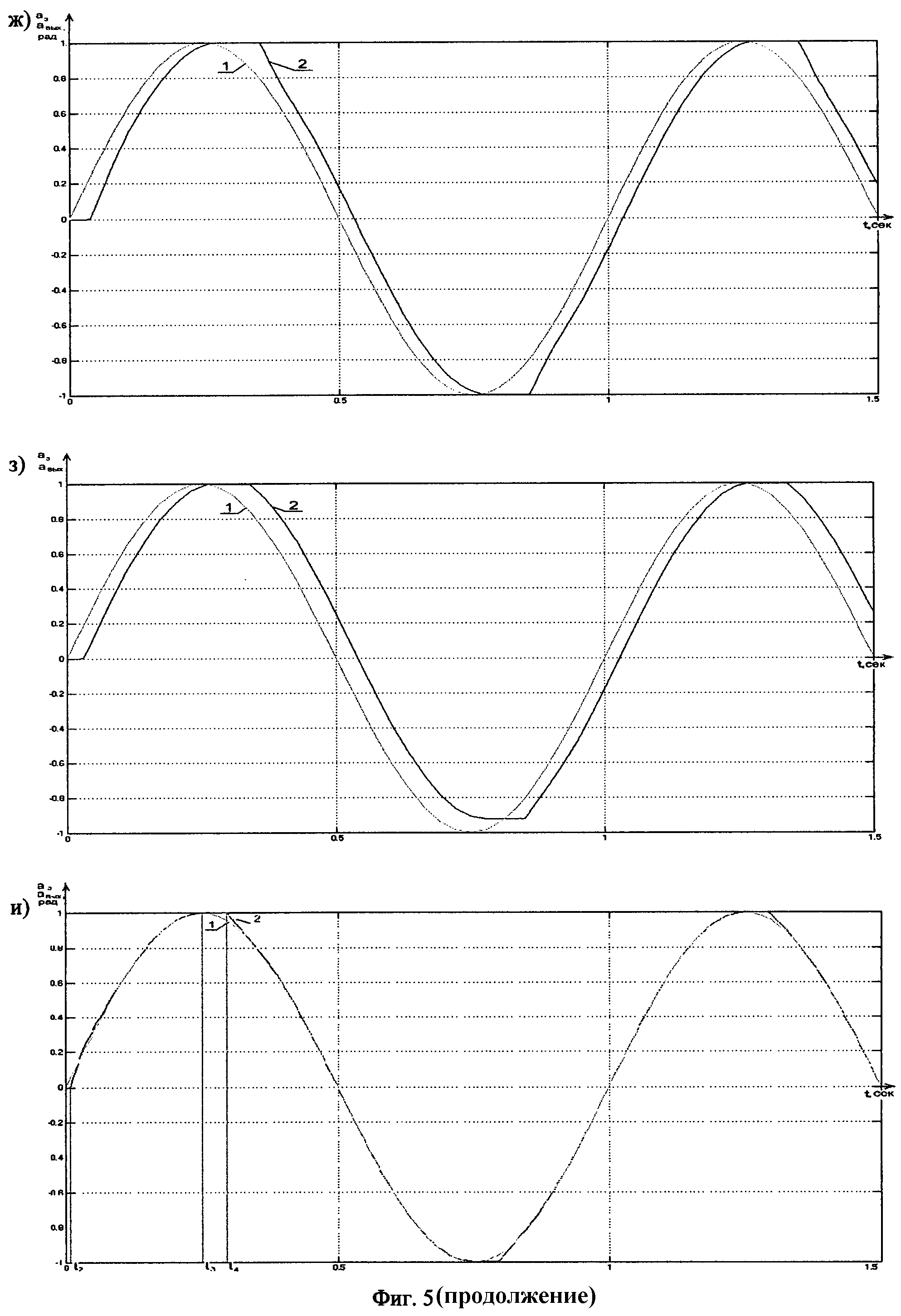
ж - диаграмма сигнала задания αз(t) - 1 и сигнала на выходе αвых(t) - 2 системы, содержащей нелинейность типа «люфт», без коррекции люфта;
з - диаграмма сигнала задания αз(t) - 1 и сигнала на выходе αвых(1) - 2 системы, содержащей нелинейность типа «люфт», взятой за прототип;
и - диаграмма сигнала αз(t) - 1 и сигнала на выходе αвых(t) - 2 системы, содержащей нелинейность типа «люфт», работающей по представленной методике.
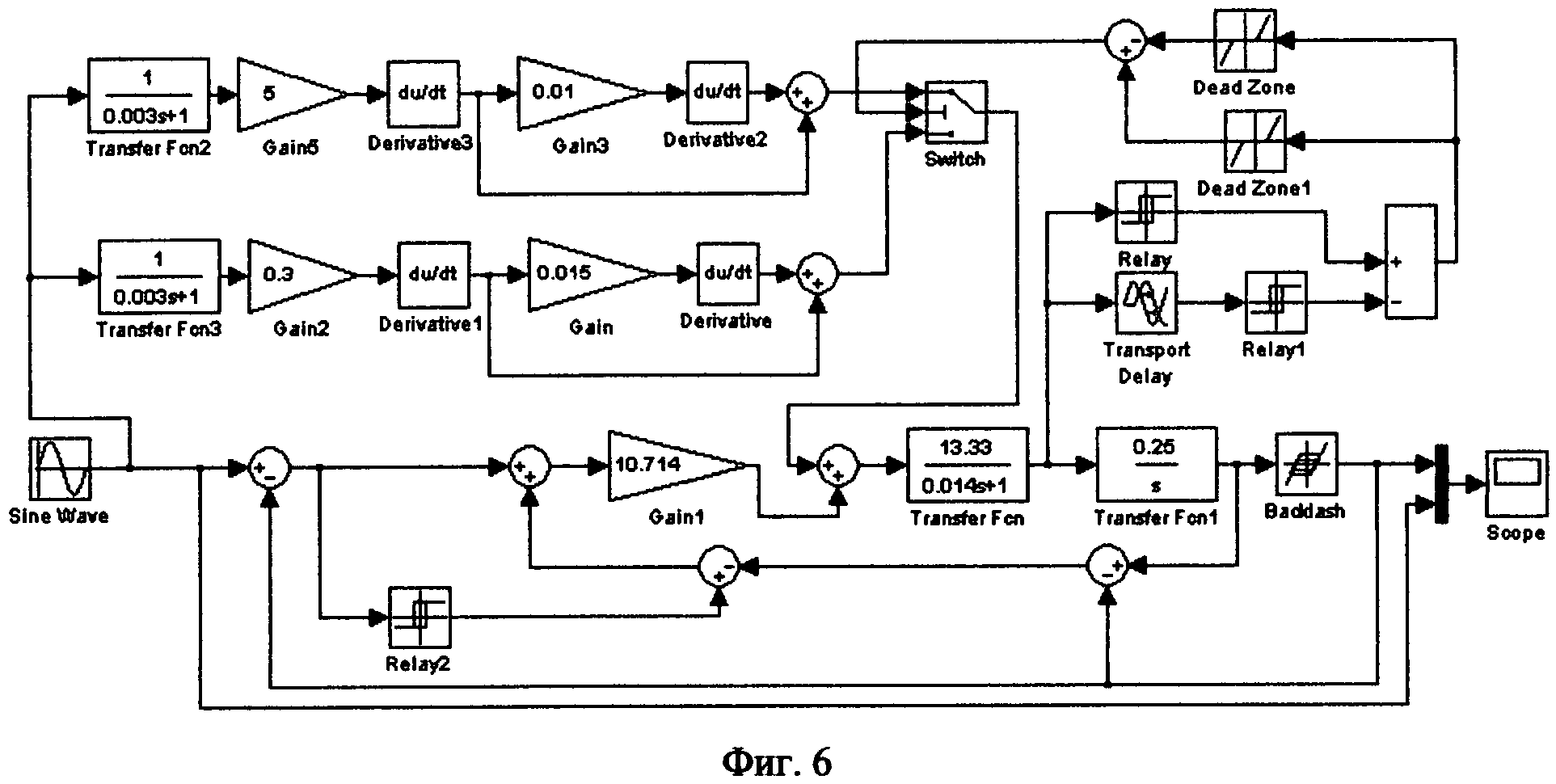
На фиг.6 представлена математическая модель представленного способа, используемая для расчетов переходных процессов системы, содержащей люфт в программе Matlab 6.5.
Система содержит измеритель рассогласования сигнала задания и сигнала единичной главной обратной связи 1, последовательно соединенные регулятор положения 2, сумматор 3, замкнутый контур скорости 4, редуктор 5, нелинейное звено типа «люфт» и объект управления с датчиком выходной координаты 6, вход формирователя управляющих импульсов 9 соединен с выходом замкнутого контура скорости 4, а выход формирователя управляющих импульсов 9 соединен с входом инвариантной связи по управляющему воздействию с переменной структурой 8, второй вход которой соединен с входом следящей системы, а выход инвариантной связи по управляющему воздействию с переменной структурой 8 связан со вторым входом сумматора 3. Замкнутый контур скорости 4 (фиг.2) состоит из последовательно соединенных измерителя рассогласования сигнала задания и сигнала обратной связи 9, регулятора скорости 10, тиристорного преобразователя 11, электродвигателя 12, обратная связь реализуется с помощью тахогенератора 13, расположенного на валу электродвигателя 12, а выход тахогенератора 13 соединен с отрицательным входом измерителя рассогласования сигнала задания и сигнала обратной связи 9. Формирователь управляющих импульсов 8 (фиг.3) содержит первый релейный элемент 14, выход которого соединен с положительным входом сумматора 15, а отрицательный вход сумматора 15 соединен с выходом второго релейного элемента 18, сигнал на входе которого сдвигается на установленное время элементом запаздывания 17, выход сумматора 15 соединен с функциональным преобразователем 16.
Система работает следующим образом. Инвариантная связь в данной системе рассчитывается по известной методике. Передаточная функция инвариантной связи по управляющему воздействию обратно пропорциональна передаточной функции системы, неохваченной инвариантной связью.
 ; Wнеохв(р)=WЗКС(р)·WРед(р),
; Wнеохв(р)=WЗКС(р)·WРед(р),
где WИС(p) - передаточная функция инвариантной связи;
Wнеохв(р) - передаточная функция части системы, неохваченной инвариантной связью по управляющему воздействию;
КЛ - коэффициент передачи люфта;
WЗКС(р) - передаточная функция замкнутого контура скорости 4;
WРед(р) - передаточная функция редуктора 5.
Коэффициент передачи нелинейного звена типа «люфт» 6 изменяется от 0 и до 1 в зависимости от состояния системы. В момент времени, когда валы соединены (люфт замкнут), коэффициент передачи нелинейного звена типа «люфт» 6 равен единице (КЛ=1), то есть передаточная функция инвариантной связи по управляющему воздействию с переменной структурой 7 рассчитывается по стандартной методике. Однако в момент времени, когда валы разъединены (люфт разомкнут), коэффициент передачи нелинейного звена типа «люфт» 6 становится равным нулю (КЛ=0). Исходя из стандартной методики расчета, передаточная функция инвариантной связи по управляющему воздействию с переменной структурой 7 стремится к бесконечности WИС(p)→∞. Реализовывать такую передаточную функцию инвариантной связи по управляющему воздействию нет практического смысла. Достаточно подобрать оптимальную передаточную функцию инвариантной связи по управляющему воздействию с переменной структурой 7 в зависимости от амплитуды задающего сигнала (для обеспечения наилучшего быстродействия и динамической точности), то есть в момент реверса WИС(p)=f(αз(р)). Время действия «корректирующей люфт инвариантной связи по управляющему воздействию» может определяться длительностью управляющих импульсов, создаваемых формирователем управляющих импульсов 8 в момент реверса двигателя, при этом длительность импульсов может изменяться.
Пусть в начальный момент времени состояние следящей системы характеризуется точкой 1 (фиг.4) при t=t1 и αз(t1)=0. Сигнал задающего воздействия αз начинает увеличиваться, система движется от точки 1 к точке 2 (фиг.4). В момент времени t1 валы редуктора 5 и объекта управления с датчиком выходной координаты 6 разъединены (люфт разомкнут). Электродвигатель 12 начинает вращаться, при этом сигнал ошибки на выходе измерителя рассогласования сигнала задания и сигнала единичной главной обратной связи 1 изменяет свой знак (δ=αз-αвых>0), формирователь управляющих импульсов 8 подает сигнал управления на инвариантную связь по управляющему воздействию с переменной структурой 7 и ее передаточная функция становится WИС(p)=f(αз(р)) - за счет этого инвариантной связью по управляющему воздействию с переменной структурой 7 формируется сигнал коррекции люфта. После исчезновения сигнала управления, поступающего с выхода формирователя управляющих импульсов 8, передаточная функция инвариантной связи по управляющему воздействию с переменной структурой 8 изменяется на первоначальную, рассчитанную по стандартной методике 
В момент времени t2 происходит соединение валов редуктора 5 и объекта управления с датчиком выходной координаты 6 (люфт замкнут). Так как с формирователя управляющих импульсов 8 не поступает сигнал управления, инвариантная связь по управляющему воздействию с переменной структурой 7 имеет передаточную функцию, рассчитанную по стандартной методике
В момент времени t3 сигнал задающего воздействия αз, достигает максимального значения и начинает уменьшаться. Сигнал ошибки на выходе измерителя рассогласования сигнала задания и сигнала единичной главной обратной связи 1 изменяет свой знак (δ=αз-αвых>0), происходит реверс электродвигателя 12 и расцепление валов редуктора 5 и объекта управления с датчиком выходной координаты 6 (люфт разомкнут). При реверсе электродвигателя 12 с выхода формирователя управляющих импульсов 8 подается сигнал управления на вход инвариантной связи по управляющему воздействию с переменной структурой 7, передаточная функция которой становится WИС(p)=f(αз(р)) - создается сигнал коррекции люфта. После исчезновения сигнала управления, поступающего с выхода формирователя управляющих импульсов 8, передаточная функция инвариантной связи по управляющему воздействию с переменной структурой 7 изменяется на первоначальную, рассчитанную по стандартной методике 
В момент времени t4 происходит соединение валов редуктора 5 и объекта управления с датчиком выходной координаты 6 (люфт замкнут). Так как с формирователя управляющих импульсов 8 не поступает сигнал управления, инвариантная связь по управляющему воздействию с переменной структурой 7 имеет передаточную функцию, рассчитанную по стандартной методике
Формирователь управляющих импульсов работает следующим образом: сигнал с выхода замкнутого контура скорости 4 поступает на вход формирователя управляющих импульсов 8, где он сдвигается элементом запаздывания 17 на установленное время, определяющее длительность управляющих импульсов. Первый релейный элемент 14 и второй релейный элемент 18 меняют знак сигналов на выходе в момент реверса электродвигателя 12. Затем сигнал с выхода второго релейного элемента 18 вычитается из выходного сигнала первого релейного элемента 14 сумматором 15, при этом формируются разнополярные импульсы, которые поступают на вход функционального преобразователя 16. Функциональный преобразователь 16 преобразует разнополярные импульсы в однополярные. Затем эти импульсы, формируемые в момент реверса электродвигателя 12, подаются на инвариантную связь по управляющему воздействию с переменной структурой 7 для обеспечения переключения ее передаточной функции от рассчитанной по стандартной методике
, к WИС(p)=f(αз(р)), на время подачи управляющего импульса с выхода формирователя управляющих импульсов 8.
Физический смысл разработанного способа управления в системе с люфтом заключается во введении дополнительного сигнала коррекции люфта αИС, формируемого инвариантной связью по управляющему воздействию с переменной структурой 7, изменяемой в момент реверса электродвигателя 12 при подаче управляющего импульса формирователем управляющих импульсов 8. Динамические характеристики следящей системы с люфтом с предложенным способом управления определяются характеристиками линейной системы без люфта, которые повышаются с введением инвариантной связи по управляющему воздействию с переменной структурой 7 за счет устранения скоростной ошибки системы, а также уменьшения времени прохождения зоны люфта за счет создания сигнала коррекции αИС в дополнение к импульсному сигналу αСЗ.
Точность работы современных систем автоматического регулирования обычно ограничивается величиной зоны люфта механической передачи и объекта управления. Предлагаемый способ позволяет компенсировать люфт при любых величинах люфта и в любых системах, имеющих механические, гидравлические и пневматические передачи. Это повышает эффективность работы систем автоматического регулирования и расширяет их функциональные возможности.
Гидразинный способ получения азидов щелочных и щелочноземельных металлов
Способ сжигания природного газа и устройство для его осуществления
Способ оценки энергии активации пластической деформации поверхностного слоя и переносной склерометр для его осуществления
Способ автоматического пропорционального регулирования с адаптивным шагом квантования и устройство для его реализации
Способ нанесения композиционного электролитического покрытия на металлические изделия
Деаэратор перегретой воды
Способ оценки газосодержания материалов с покрытиями
Парогазовая установка электростанции
Устройство для триботехнических испытаний материалов
Способ получения пористых покрытий на металлических имплантатах

