Результат интеллектуальной деятельности: СПОСОБ АВТОМАТИЧЕСКОГО ПРОПОРЦИОНАЛЬНОГО РЕГУЛИРОВАНИЯ С АДАПТИВНЫМ ШАГОМ КВАНТОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ
Вид РИД
Изобретение
Изобретение относится к технике автоматического управления, в частности к регуляторам дискретного действия замкнутых систем управления промышленным оборудованием.
Известен способ пропорционально-дифференциального (ПД) дискретного регулирования [1]. При дискретном ПД-регулировании в начале каждого шага квантования формируется выходной сигнал регулятора, который является суммой сигнала, пропорционального ошибке регулирования (пропорциональная или П-составляющая), и сигнала, пропорционального производной от ошибки по времени (дифференциальная или Д-составляющая), и удерживается постоянным на выходе регулятора дискретного действия весь интервал времени одного шага. При резких скачках сигнала ошибки, что имеет место в моменты быстрого изменения сигнала задания, Д-составляющая, а следовательно, и управление, имеют большую величину и противоположны по знаку сигналу ошибки. Это быстро минимизирует сигнал ошибки.
Недостатки ПД-способа дискретного регулирования - сложность реализации операции дифференцирования сигнала ошибки и чувствительность ее к помехам измерения, варьированию параметров объекта и настроек регулятора дискретного действия, а также большое влияние заданного шага квантования на качество управления.
Наиболее близким по технической сущности к предлагаемому является способ пропорционального дискретного регулирования [1]. Его функционирование заключается в том, что на каждом шаге квантования вырабатывается управляющее воздействие, пропорциональное величине ошибки εi=yЗАД-yi,
где εi - ошибка управления на i-том шаге,
yЗАД - заданное значение выхода объекта управления,
yi - значение выхода объекта управления в начале i-го шага.
Данное управляющее воздействие u вычисляется как ui=kРЕГεi,
где kРЕГ - коэффициент регулятора.
Управляющее воздействие постоянно на всем интервале каждого шага квантования.
Недостаток вышеназванного способа дискретного регулирования - более медленное, чем при дискретном ПД-регулировании, движение системы к требуемому состоянию, характеризующемуся минимумом установившейся ошибки. Кроме того, качество регулирования данного способа сильно зависит от заданной величины шага квантования. То есть если параметры объекта изменятся после первоначальной настройки, то качество регулирования в указанном способе ухудшится.
Известно устройство для дискретного пропорционального способа регулирования, представленное в [2], содержащее вычитающее устройство, входы которого соединены с блоком задания и выходом объекта управления, а выход соединен с пропорциональным регулятором дискретного действия, управляющий вход пропорционального регулятора дискретного действия соединен с выходом тактового генератора, а выход - с входом объекта управления. Устройство для дискретного пропорционального способа регулирования [2] обладает основным недостатком - зависимостью своего поведения от шага дискретизации. Если устройство имеет большой шаг квантования, то оно будет малочувствительным к помехам и возмущениям, возникающим в системе. Если же оно имеет маленький шаг квантования, то оно оказывается слишком чувствительным к помехам и возмущениям, что тоже отрицательно сказывается на качестве регулирования в целом.
Технический результат предлагаемого изобретения состоит в улучшении качества управления системы автоматического регулирования, а именно минимизации сигнала ошибки быстрее, чем в указанном прототипе, снижении чувствительности системы к помехам датчиков, варьированию параметров объекта и настроек дискретного пропорционального регулятора, а также уменьшение зависимости от выбранного шага квантования.
Указанный технический результат достигается тем, что в известном способе автоматического пропорционального регулирования с адаптивным шагом квантования, заключающемся в вычислении сигнала ошибки как разности задающего сигнала и фактического выходного сигнала системы и выработке в дискретные моменты времени управляющего сигнала, пропорционального сигналу ошибки по величине и противоположного по знаку, моменты выработки управляющего сигнала отстоят друг от друга на неравные промежутки времени, пропорциональные модулю сигнала ошибки, не меньшие, чем минимально возможный по условиям работы системы шаг ΔMIN, то есть величина i-го промежутка времени выбирается из выражения
Δi=max(k|εi|,ΔMIN),
где Δi - величина шага i-го шага квантования,
k - коэффициент,
εi - величина ошибки управления в начале i-го шага квантования,
ΔMIN - минимальное значение шага квантования.
Указанный технический результат достигается также тем, что устройство для реализации способа, содержащее вычитающее устройство, входы которого соединены с блоком задания и выходом объекта управления, а выход соединен с пропорциональным регулятором дискретного действия, управляющий вход пропорционального регулятора дискретного действия соединен с выходом тактового генератора, а выход - с входом объекта управления, дополнительно содержит блок выделения максимального сигнала и источник постоянного сигнала ΔMIN, блок выделения максимального сигнала подключен к входу тактового генератора, первый вход которого связан с источником постоянного сигнала ΔMIN, а второй вход через усилитель с коэффициентом усиления k подключен к выходу вычитающего устройства.
Краткое описание чертежей
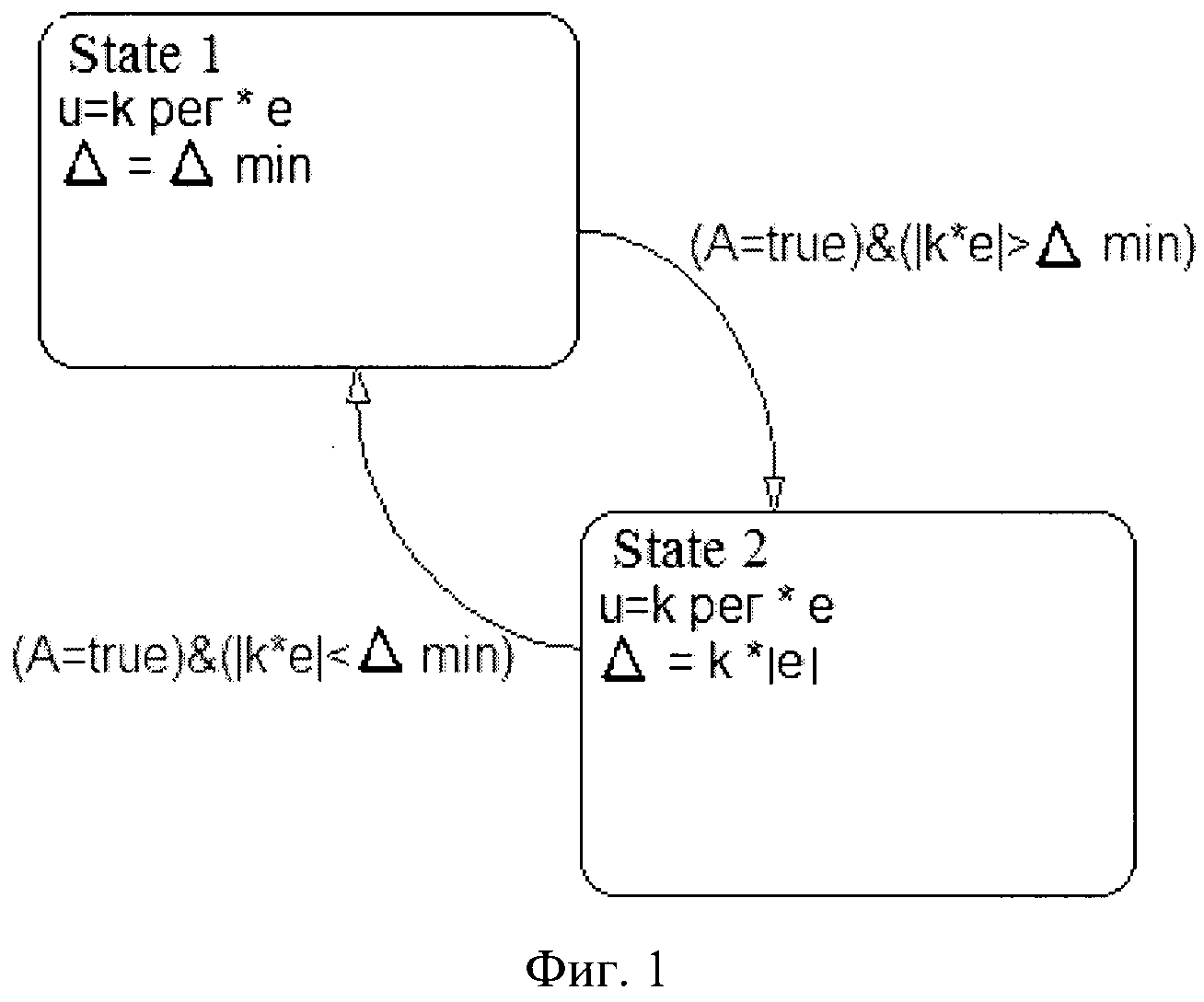
Фиг.1 - диаграмма переходов предлагаемого способа регулирования;
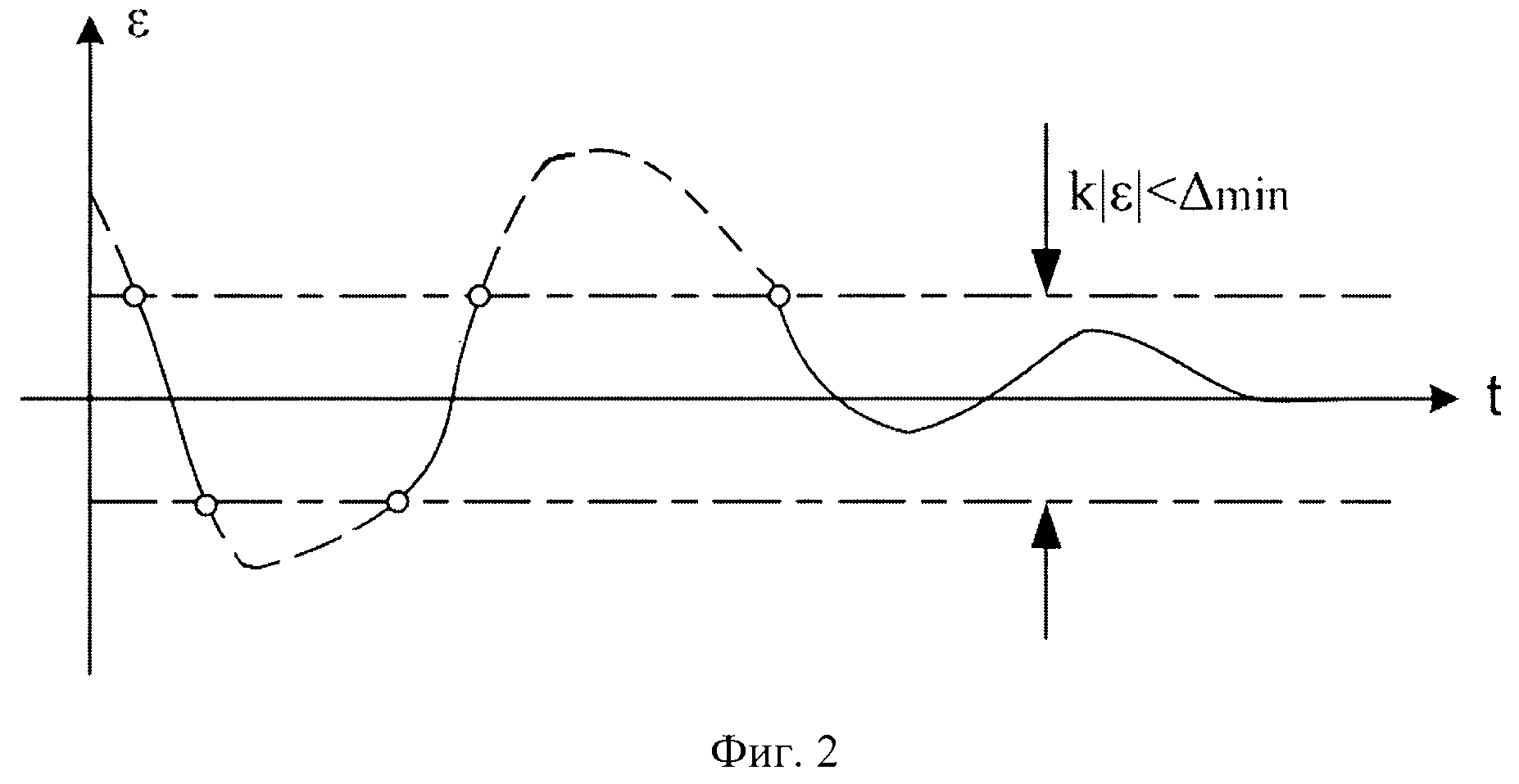
фиг.2 - график, иллюстрирующий логику выбора шага квантования;
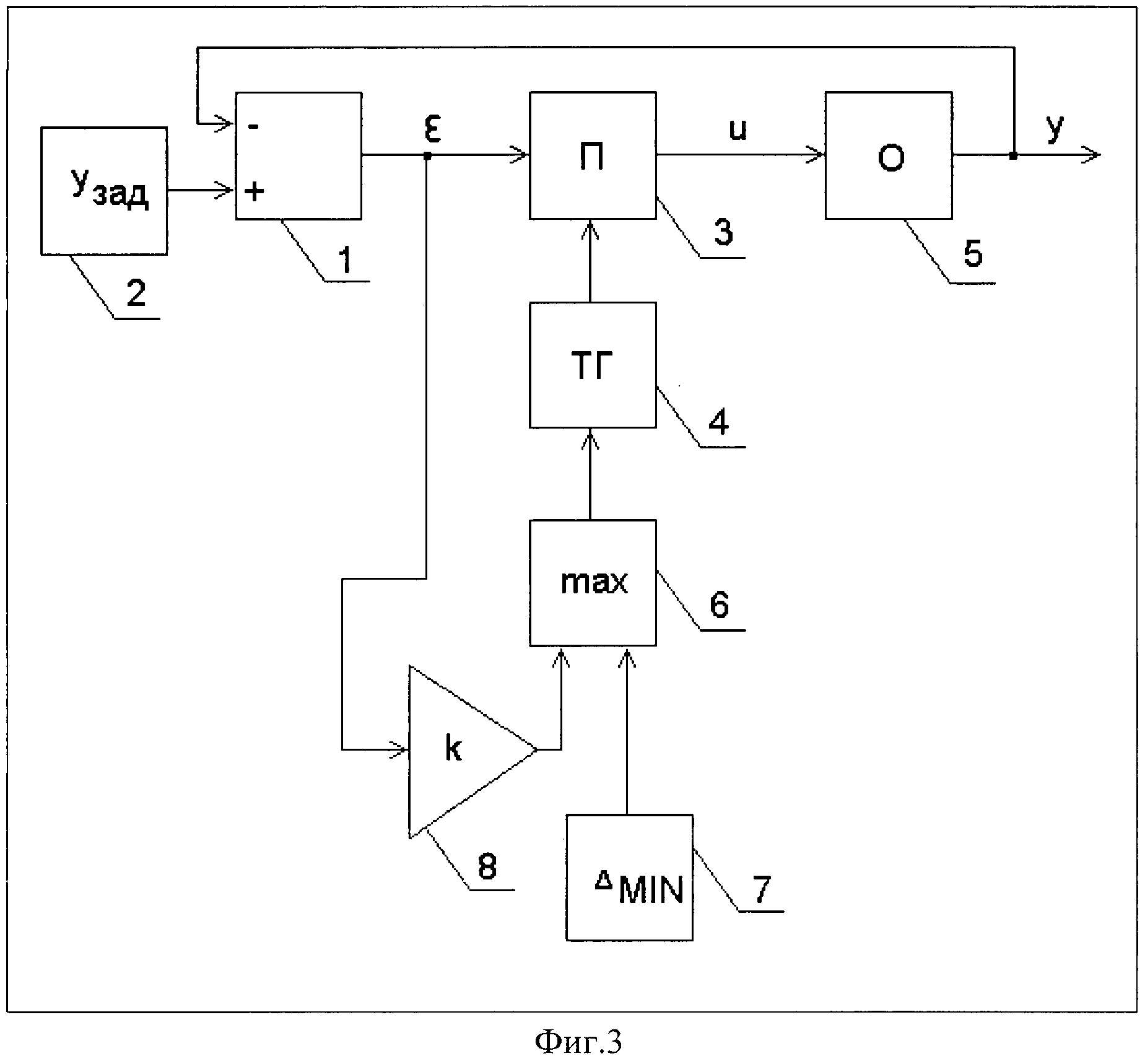
фиг.3 - схема, иллюстрирующая пример конфигурации устройства реализации изобретения;
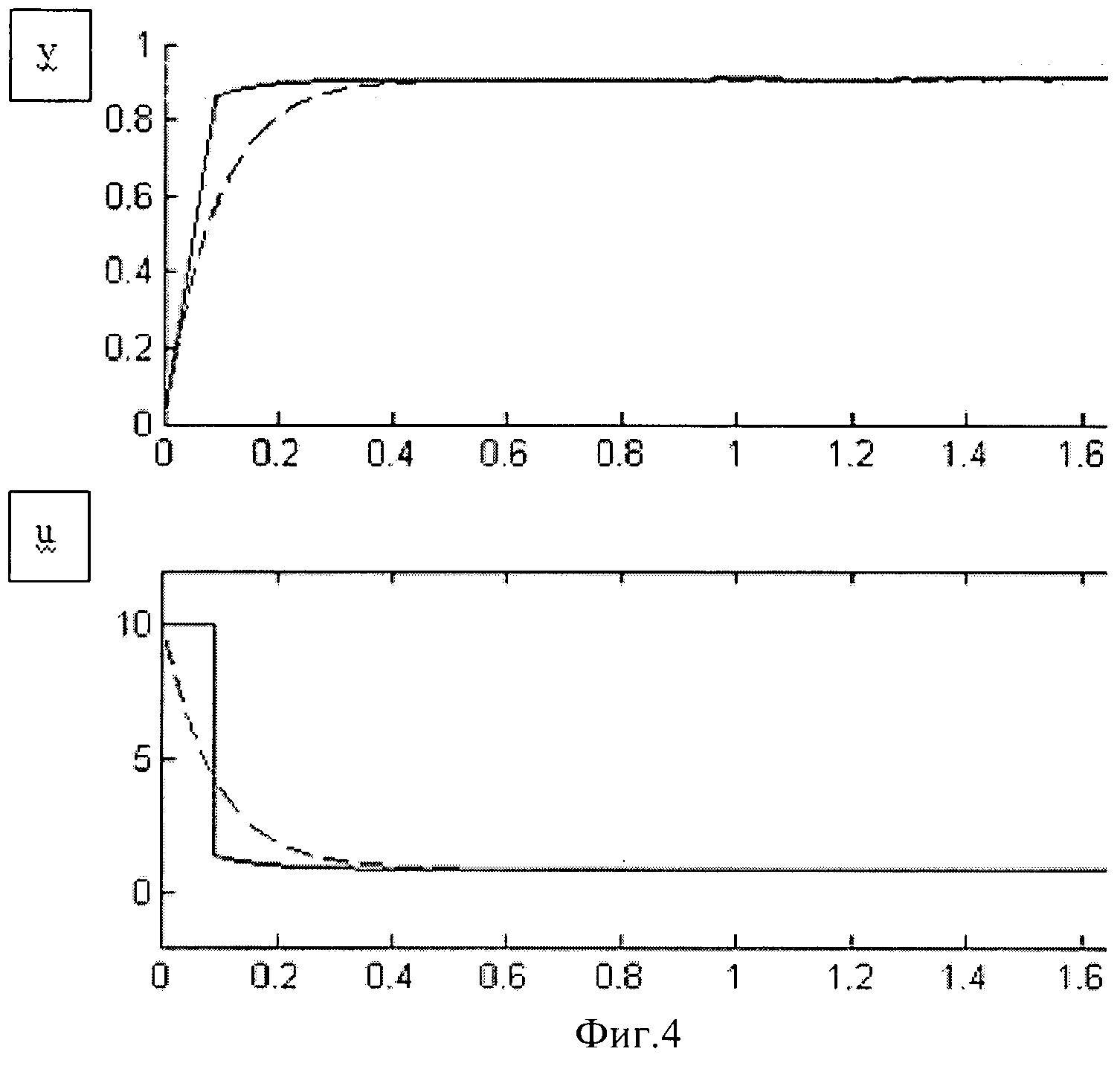
фиг.4 - графики, представляющие сравнение режимов работы предлагаемого и известного устройства;
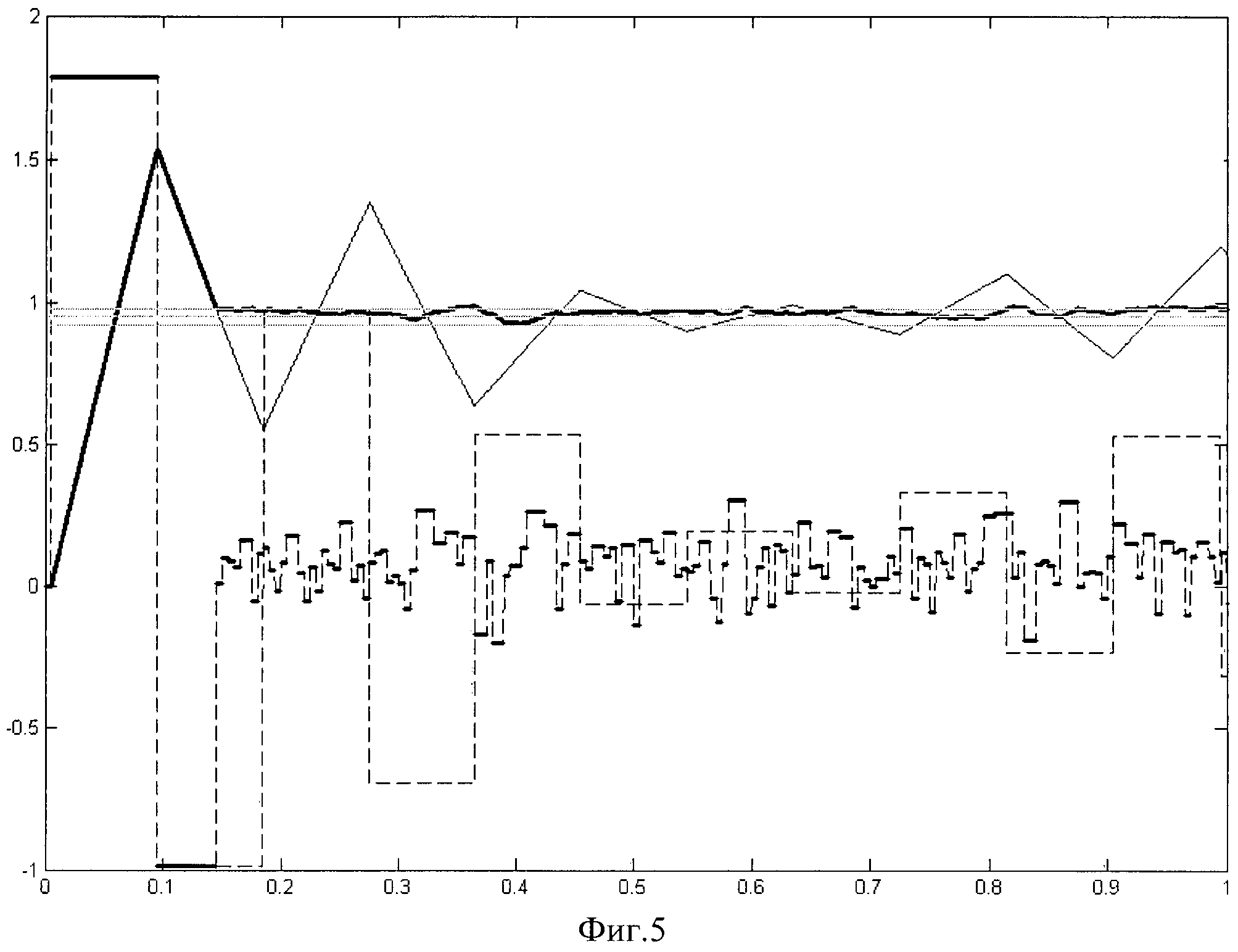
фиг.5 - графики, представляющие сравнение режимов работы предлагаемого и известного устройства; и
фиг.6 - графики, представляющие сравнение режимов работы предлагаемого и известного устройства.
Предлагаемый способ автоматического пропорционального регулирования с адаптивным шагом квантования основывается на теории конечных автоматов [3]. Диаграмма переходов показана на фиг.1. Для реализации способа используется 2 состояния: State 1 и State 2. Переход между ними осуществляется при одновременном выполнении 2-х условий: в начале шага квантования (условие A=true) и при выполнении логического выражения k|εi|>ΔMIN либо k|εi|<ΔMIN. Состояние State 1 соответствует функционированию системы с минимальным шагом квантования ΔMIN (обозначено как Δ=ΔMIN). Состояние State 2 соответствует функционированию системы с переменным шагом квантования, определяемому по выражению Δi=k|εi| (обозначено как Δ=k|e|). В каждом состоянии вырабатывается управляющее воздействие (постоянное в течение каждого шага квантования), пропорциональное величине ошибки εi=yЗАД-yi (обозначено как u=k рег*e),
где εi - ошибка управления на i-том шаге,
yЗАД - заданное значение выхода объекта управления,
yi - значение выхода объекта управления в начале i-го шага.
На фиг.2 представлен график ε(t). Штрих-пунктирной линией показаны границы зоны, в которой выполняется условие k|εi|<ΔMIN. Сплошная линия соответствует таким значениям ε, при которых регулятор находится в состоянии State 1. (Для простоты считаем, что условие A=true в точках выхода и входа в вышеназванную зону выполняется.) Штриховая линия соответствует таким значениям ε, при которых регулятор находится в состоянии State 2.
Пример функционирования данного способа показан в таблице 1, где приведены значения каждого шага квантования при стабилизации переходного процесса объекта с передаточной функцией  и при значении минимального шага квантования, равном 0.1 с.
и при значении минимального шага квантования, равном 0.1 с.
|
Как видим, только первые два шага имеют длительность большую, чем заданная минимальная величина шага квантования, то есть при максимальной ошибке управления. Затем, по мере уменьшения ошибки, регулирование осуществляется при величине шага квантования, равной минимальному. Длительное воздействие на объект управления сигнала, имеющего большую амплитуду, быстро минимизирует сигнал ошибки. С уменьшением сигнала ошибки частота дискретизации увеличивается, что позволяет точно отслеживать малые по амплитуде помехи.
Приведем сравнение значений ошибки управления для предлагаемого способа (обозначен как Способ 1) и вышеназванного аналога (обозначен как Способ 2).
|
При шаге квантования ΔMIN=0.5 увеличилась колебательность процесса, вследствие чего получились представленные результаты. Несмотря на это, по приведенным результатам можно видеть лучшую динамику системы управления при использовании Способа 1, о чем говорит меньшая величина ошибки управления, чем при использовании Способа 2.
Устройство, изображаемое на фиг.3, содержит вычитающее устройство 1, первый вход которого соединен с блоком задания 2, а выход - с пропорциональным регулятором дискретного действия 3, управляющий вход пропорционального регулятора дискретного действия соединен с выходом тактового генератора 4, а выход - с входом объекта управления 5, к входу тактового генератора 4 подключен блок выделения максимального сигнала 6, первый вход которого связан с источником 7 постоянного сигнала ΔMIN, а второй вход через усилитель 8 с коэффициентом усиления k подключен к выходу вычитающего устройства 1.
Устройство работает следующим образом. Сигнал ошибки на выходе вычитающего устройства 1 ε(t)=yЗАД-y(t). В дискретные моменты времени t=ti, задаваемые тактовым генератором 4, на выходе пропорционального регулятора дискретного действия 3 будет формироваться сигнал u(ti)=A·ε(ti), пропорциональный сигналу ошибки. Моменты выработки управляющего сигнала отстоят друг от друга на неравные промежутки времени, причем величина i-го промежутков времени выбирается из выражения Δi=max(k|εi|,ΔMIN), т.е. каждый следующий момент выработки управляющего сигнала отстоит от предыдущего на промежуток времени, пропорциональный модулю сигнала ошибки, но не меньший, чем минимально возможный по условиям работы системы шаг ΔMIN. Это означает, что очередной управляющий сигнал будет действовать на объект управления тем дольше, чем больше модуль сигнала ошибки, т.е. чем больше отклонение y(t) от yЗАД. Длительное воздействие на объект управления сигнала, имеющего большую амплитуду, быстро минимизирует сигнал ошибки. С уменьшением сигнала ошибки частота срабатываний пропорционального регулятора дискретного действия 3 увеличивается, что позволяет точно отслеживать малые по амплитуде помехи.
При достижении предельной частоты срабатывания дальнейшего ее увеличения не происходит.
На фиг.4 представлены временные диаграммы работы предлагаемой системы (сплошная линия) и системы с пропорциональным регулятором дискретного действия при постоянной высокой частоте срабатывания (пунктирная линия). Из диаграмм видно, что динамические свойства предлагаемого способа и устройства превосходят динамические свойства известного способа и устройства (что выражается в быстрой минимизации сигнала ошибки).
Из фиг.5 видно, что переходные процесс и сигнал управления изобретения (показаны жирным) превосходят переходные процесс и сигнал управления прототипа по некоторым параметрам. Для получения данных временных диаграмм использовалось известное устройство (П-регулятор) с большим шагом квантования. Предлагаемое устройство обеспечивает сходную динамику, но большую точность, что и было заявлено как технический результат от работы устройства.
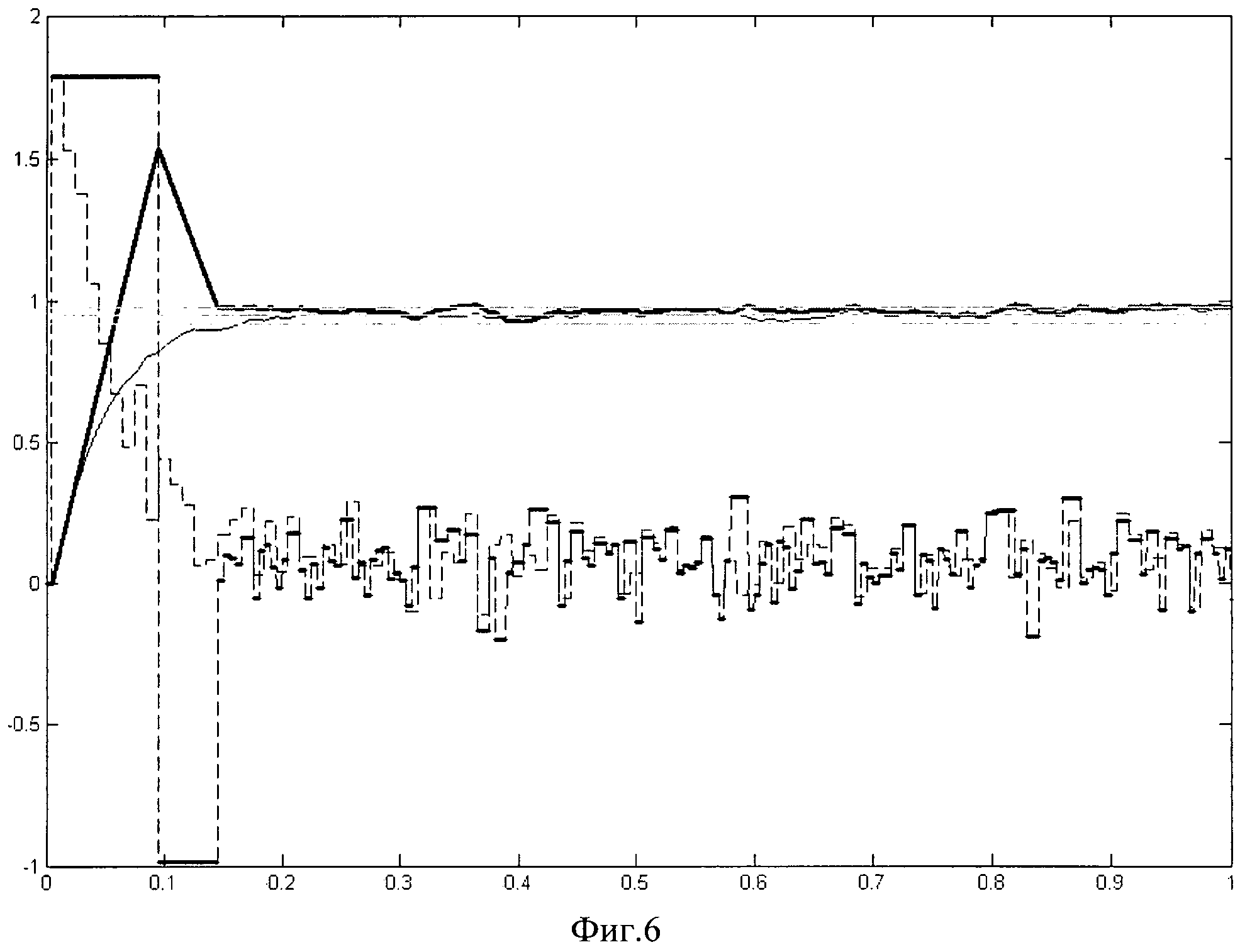
Из фиг.6 видно, что переходные процесс и сигнал управления изобретения (показаны жирным) превосходят переходные процесс и сигнал управления прототипа по некоторым параметрам. Для получения данных временных диаграмм использовалось известное устройство (П-регулятор) с малым шагом квантования. Предлагаемое и известное устройства имеют незначительно отличающуюся точность управления, но предлагаемое устройство быстрее выводит объект управления на заданный уровень.
Используемая литература
1. Astrom, Karl J. (Karl Johan), Hagglund, Tore. PID Controllers: Theory, design, and Tuning. - 2nd ed. - Instrument Society of America, 1994. - p.352.
2. Katsuhiko Ogata. Discrete-Time Control Systems, Second Edition. - Prentice Hall, 1995. - p.745.
3. Трахтенброт Б.А, Барздинь Я.М. Конечные автоматы (поведение и синтез) - М.: Наука, 1970. - 400 с.
Гидразинный способ получения азидов щелочных и щелочноземельных металлов
Способ сжигания природного газа и устройство для его осуществления
Способ оценки энергии активации пластической деформации поверхностного слоя и переносной склерометр для его осуществления
Способ нанесения композиционного электролитического покрытия на металлические изделия
Деаэратор перегретой воды
Способ оценки газосодержания материалов с покрытиями
Парогазовая установка электростанции
Устройство для триботехнических испытаний материалов
Способ получения пористых покрытий на металлических имплантатах
Способ замены труб в трубопроводах

