Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО УГЛА И АЗИМУТА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР
Вид РИД
Изобретение
Изобретение относится к гироскопическому инклинометру (гироинклинометру) и может быть использовано для обследования нефтяных и газовых скважин.
Известен способ выработки инклинометрических углов [1], заключающийся в том, что измеряют величины кажущихся ускорений и проекций угловой скорости по осям приборного трехгранника, связанного с корпусом инклинометра. Цифровой вычислитель корректирует выходные сигналы измерителей угловой скорости и измерителей ускорения в зависимости от температуры внутри корпуса гироинклинометра и вырабатывает по ним величины инклинометрических углов. По скорректированным сигналам измерителей угловой скорости и измерителей ускорения вычисляют грубые величины трех углов взаимного положения приборного трехгранника, связанного с корпусом инклинометра, относительно географического трехгранника в зависимости от величины сигнала измерителя ускорения, имеющего ось чувствительности, параллельную продольной оси инклинометра, путем алгебраических и тригонометрических преобразований. Точные величины этих углов получают путем интегрирования системы дифференциальных уравнений типа Пуассона с использованием грубых величин углов взаимного положения трехгранников. Величины инклинометрических углов определяют по величинам точных значений углов взаимного положения трехгранников, кодируют эти величины и передают на поверхность Земли по каналу связи.
Недостатком данного способа является то, что величины кажущихся ускорений и проекций угловой скорости измеряют по осям приборного трехгранника, связанного с корпусом инклинометра, что порождает дополнительные погрешности в режиме непрерывного измерения, так как измерители ускорении и измерители угловой скорости участвуют во вращении скважинного прибора вокруг продольной оси.
Наиболее близким к заявленному способу является способ определения азимута и зенитного угла скважины посредством гироинклинометра [2], обеспечивающий измерение траектории скважины в режиме неограниченных зенитных углов. Способ включает измерение ускорения силы тяжести по трем взаимно ортогональным осям чувствительности измерителей ускорения, причем одна из названных осей совпадает с продольной осью скважинного прибора, а также измерение угловой скорости по оси чувствительности измерителя угловой скорости, совпадающей с осью чувствительности одного измерителя ускорения и перпендикулярной продольной оси скважинного прибора, стабилизацию указанных осей относительно оси, совпадающей с продольной осью скважинного прибора.
В режиме начальной азимутальной ориентации связанно вращают оси чувствительности измерителей ускорения и измерителя угловой скорости вокруг продольной оси скважинного прибора с постоянной скоростью на заданный угол. Во время вращения на каждом такте времени работы вычислителя измеряют угол поворота указанных выше осей относительно корпуса скважинного прибора, а также горизонтальную составляющую угловой скорости вращения Земли совместно с угловой скоростью дрейфа гироскопа по оси чувствительности измерителя угловой скорости. По результатам измерений вычисляют среднюю угловую скорость вращения осей чувствительности измерителей ускорения и измерителя угловой скорости, систематическую составляющую дрейфа гироскопа и формируют эталонную модель измеряемой угловой скорости. Для оценки фазового сдвига выходного сигнала измерителя угловой скорости вычисляют функцию невязки, которую минимизируют по фазовому сдвигу и определяют азимутальный угол осей чувствительности измерителей ускорений.
В режиме работы по результатам режима начальной азимутальной ориентации формируют матрицу ориентации. Измеряют ускорение и угловую скорость по указанным осям. По результатам измерений формируют на каждом такте работы вычислителя приращение матрицы ориентации, вычисляют азимут и зенитный угол, причем на каждом такте контролируют величину зенитного угла, проверяя выполнение условий:
Θi≅Θ1; Θi≥Θ2; Θ2>Θi>Θ1, где Θ1, Θ2 - константы Θ1=45°, Θ2=135°.
Выбор значений констант Θ1 и Θ2 обусловлен тем, что при этих значениях обеспечивается минимизация погрешности при переходе, необходимом для корректного вычисления элементов матрицы ориентации для зенитных углов Θ2>Θi>Θ1 от акселерометров, оси чувствительности которых ортогональны продольной оси скважинного прибора, к акселерометру, ось чувствительности которого совпадает с продольной осью скважинного прибора.
Недостатком данного способа является то, что в сигнале измерителя угловой скорости отсутствует компенсация погрешности от изменения угла ошибки стабилизации αОС осей чувствительности измерителей ускорения и измерителя угловой скорости.
В выходном сигнале измерителя угловой скорости кроме полезного сигнала, а именно горизонтальной составляющей угловой скорости вращения Земли, присутствует сигнал от угла ошибки стабилизации αОС. Оба сигнала содержат в себе гармоническую составляющую частоты вращения осей чувствительности измерителей ускорения и измерителя угловой скорости. Наложение двух гармонических сигналов одной частоты в канале измерителя угловой скорости приводит к искажению фазы измеряемого сигнала.
В ближайшем аналоге расчет азимутального угла осей чувствительности измерителей ускорения в режиме начальной азимутальной ориентации реализуется по информации о фазе гармонической составляющей сигнала измерителя угловой скорости, поэтому изменение угла ошибки стабилизации, изменяющее фазу сигнала измерителя угловой скорости, неизбежно сказывается на точности определения азимутального угла осей чувствительности измерителей ускорения на момент окончания начальной азимутальной ориентации, а как следствие, и в режиме работы.
При измерении траектории скважины при условии достижения зенитных углов Θ2>Θi>Θ1 система переходит в режим бесплатформенной инерционной навигационной системы, в котором азимут ствола скважины рассчитывают с учетом сигнала измерителя угловой скорости, поэтому погрешность измерителя угловой скорости от угла ошибки стабилизации неизбежно сказывается на точности расчета азимута скважины.
Кроме того, информация с измерителя угловой скорости используется в режиме измерения при оценке нулевого сигнала измерителя угловой скорости и при определении момента остановки скважинного прибора. Погрешность измерителя угловой скорости от угла ошибки стабилизации также приведет к неточным результатам при выполнении этих процедур.
С увеличением широты места измерения в выходном сигнале измерителя угловой скорости горизонтальная составляющая угловой скорости вращения Земли, т.е. полезный сигнал, уменьшается, в то время как величина погрешности измерителя угловой скорости от угла ошибки стабилизации αОС остается прежней. Поэтому, та же величина погрешности от угла ошибки стабилизации на большей широте вызывает больший сдвиг фазы в выходном сигнале измерителя угловой скорости. Таким образом, очевидно, что погрешность измерителя угловой скорости от угла ошибки стабилизации вносит существенную погрешность в определение траектории ствола протяженных наклонных и горизонтальных скважин, особенно на высоких широтах.
Известно устройство бескарданный гироскопический инклинометр [1], содержащий герметичный цилиндрический корпус, в котором жестко установлены два трехстепенных гироскопа и три одноосных акселерометра, а также установлены датчик температуры и цифровой вычислитель.
При этом акселерометры установлены так, что их оси чувствительности взаимно ортогональны, а ось чувствительности одного из них параллельна продольной оси скважинного прибора, реализуя, таким образом, трехгранник координатных осей, связанный с корпусом инклинометра. Ось собственного вращения гироскопа совпадает с продольной осью скважинного прибора, а ось собственного вращения второго гироскопа перпендикулярна ей. При этом три оси прецессии гироскопов совпадают с тремя осями чувствительности акселерометров, а четвертая ось остается резервной.
Недостатком данного устройства является то, что гироскопы и акселерометры жестко закреплены на корпусе скважинного прибора, поэтому в режиме непрерывного движения скважинного прибора в скважине возникают дополнительные погрешности, обусловленные вращением осей чувствительности датчиков вокруг продольной оси. В данном устройстве для обеспечения требуемой точности измерения необходимо, чтобы датчики угловой скорости, реализованные на базе гироскопов, обладали как и широким диапазоном измерения, так как угловая скорость вращения корпуса скважинного прибора при спуске его в скважину достигает значительных величин, так и высокой чувствительностью к небольшим угловым скоростям, так как необходимо измерять угловую скорость вращения Земли.
Наиболее близким к заявленному устройству является гироинклинометр [2], содержащий наземный вычислитель, соединенный каротажным кабелем со скважинным прибором, содержащим блок обработки информации и датчик информации. Блок обработки информации включает однокристальную ЭВМ и приемопередатчик, осуществляющий обмен данными между наземным вычислителем и скважинным прибором. Датчик информации включает одноосный гироскопический стабилизатор (гиростабилизатор), состоящий из корпуса, расположенной внутри него вращающейся платформы, двигателя стабилизации, кинематически связанного с осью стабилизации, совпадающей с продольной осью скважинного прибора. На платформе закреплен ротор выходного датчика угла в виде синусно-косинусного трансформатора (СКТ) и жестко установлены два акселерометра со взаимно ортогональными осями чувствительности, ориентированными перпендикулярно продольной оси скважинного прибора, а также двухкомпонентный индикаторный трехстепенной гироскопический датчик (гироскоп) на сферической шарикоподшипниковой опоре с датчиками угла и датчиками момента, причем вектор кинетического момента гироскопа перпендикулярен плоскости платформы и совпадает с осью чувствительности одного акселерометра. Один канал гироскопа используется в качестве датчика угловой скорости, для чего сигнал с датчика угла гироскопа через усилитель подается на датчик момента гироскопа, а сигнал по скорости снимается с резистора, последовательно включенного с датчиком момента гироскопа.
На базе второго канала гироскопа реализован одноосный гиростабилизатор, использующий усиленный сигнал с датчиков угла гироскопа для создания разгрузочного момента, стабилизирующего платформу.
На корпусе датчика информации закреплен статор СКТ и установлен третий акселерометр, ось чувствительности которого совпадает с продольной осью скважинного прибора.
Недостатком данного устройства является недостаточно высокая точность определения азимутального угла осей чувствительности акселерометров на момент окончания начальной азимутальной ориентации и азимута в режиме измерения при зенитном угле Θ2>Θi>Θ1, которая обусловлена тем, что при данном типе гироскопа, имеющем конечную постоянную времени собственной прецессии, угол ошибки стабилизации платформы вызывает погрешность в канале датчика угловой скорости.
С точки зрения влияния на дрейф гироскопа момент двигателя гироскопа целесообразно разделить на две составляющие: продольный момент двигателя гироскопа  , направленный по продольной оси гироскопа - оси собственного вращения гироскопа, и поперечный момент двигателя гироскопа
, направленный по продольной оси гироскопа - оси собственного вращения гироскопа, и поперечный момент двигателя гироскопа  , перпендикулярный продольной оси гироскопа.
, перпендикулярный продольной оси гироскопа.
Направление продольного момента двигателя  определяется положением статора двигателя гироскопа и не зависит от положения ротора гироскопа. При нейтральном положении ротора гироскопа продольный момент двигателя
направлен по оси собственного вращения ротора и уравновешивает противоположно направленный момент сопротивления Мсопр этому вращению.
определяется положением статора двигателя гироскопа и не зависит от положения ротора гироскопа. При нейтральном положении ротора гироскопа продольный момент двигателя
направлен по оси собственного вращения ротора и уравновешивает противоположно направленный момент сопротивления Мсопр этому вращению.
Момент сопротивления Мсопр складывается из момента трения сферической шарикоподшипниковой опоры гироскопа и аэродинамического момента сопротивления.
Трение в подвесах платформы, а также конечность контурного коэффициента канала стабилизации, связанная с характеристикой двигателя стабилизации и выбранной схемой привода гиростабилизатора, неизбежно вызывают появление угла ошибки стабилизации αОС платформы. Поскольку на платформе жестко установлен статор двигателя гироскопа, а ротор гироскопа вращается на сферической шарикоподшипниковой опоре и имеет небольшие углы прокачки, то угол ошибки стабилизации платформы αОС в данной конструкции есть угол отклонения ротора гироскопа от нейтрального положения вокруг оси стабилизации.
Поскольку трение в подвесе платформы полностью исключить нельзя, а структура канала стабилизации ближайшего аналога является наиболее оптимальной для получения точностных и габаритных характеристик гироинклинометра, возникает необходимость компенсации погрешности от изменения угла ошибки стабилизации аппаратно-алгоритмическим методом.
При отклонении ротора гироскопа от нейтрального положения на угол αОС продольный момент двигателя  раскладывается на две составляющие, а именно, проекцию на ось кинетического момента гироскопа, равную
раскладывается на две составляющие, а именно, проекцию на ось кинетического момента гироскопа, равную  , и проекцию на ось чувствительности датчика угловой скорости, равную
, и проекцию на ось чувствительности датчика угловой скорости, равную  . При этом момент сопротивления Мсопр будет уравновешиваться проекцией продольного момента двигателя
. При этом момент сопротивления Мсопр будет уравновешиваться проекцией продольного момента двигателя  на ось кинетического момента гироскопа:
на ось кинетического момента гироскопа:
 .
.
Составляющая
имеет направление, совпадающее с направлением кинетического момента гироскопа  , поэтому не вызовет прецессии, а будет только замедлять или ускорять собственное вращение ротора гироскопа. Проекция
перпендикулярна вектору кинетического момента гироскопа
, поэтому не вызовет прецессии, а будет только замедлять или ускорять собственное вращение ротора гироскопа. Проекция
перпендикулярна вектору кинетического момента гироскопа  , и при условии отсутствия канала стабилизации платформы, реализованного на базе гироскопа, проекция
вызывала бы прецессию гироскопа по оси стабилизации платформы в сторону уменьшения угла αОС ошибки стабилизации платформы. Таким образом, составляющая
является радиально-восстанавливающим моментом Мрв. При малых углах αОС радиально-восстанавливающий момент Мрв пропорционален углу αОС ошибки стабилизации платформы и моменту сопротивления Мсопр:
, и при условии отсутствия канала стабилизации платформы, реализованного на базе гироскопа, проекция
вызывала бы прецессию гироскопа по оси стабилизации платформы в сторону уменьшения угла αОС ошибки стабилизации платформы. Таким образом, составляющая
является радиально-восстанавливающим моментом Мрв. При малых углах αОС радиально-восстанавливающий момент Мрв пропорционален углу αОС ошибки стабилизации платформы и моменту сопротивления Мсопр:
 .
.
В конструкции ближайшего аналога на базе одного канала гироскопа реализован канал стабилизации платформы, который препятствует прецессии гироскопа по оси стабилизации платформы в сторону уменьшения угла αОС.
Появление радиально-восстанавливающего момента Мрв по оси чувствительности датчика угловой скорости вызывает в выходном сигнале датчика угловой скорости погрешность от угла ошибки стабилизации платформы. Таким образом, ток I, снимаемый с резистора последовательно включенного с датчиком момента гироскопа, будет иметь две составляющие:
 ,
,
где IГЗ - ток, пропорциональный горизонтальной составляющей угловой скорости вращения Земли,
IOC - ток, пропорциональный погрешности датчика угловой скорости от угла ошибки стабилизации.
Ток IOC несет в себе информацию о погрешности датчика угловой скорости от угла ошибки стабилизации:
 ,
,
где ωОС - погрешность датчика угловой скорости от угла ошибки
стабилизации,
Тгир - постоянная времени собственной прецессии гироскопа,
 .
.
Наличие постоянной времени собственной прецессии гироскопа Тгир характерно для индикаторного гироскопа на сферической шарикоподшипниковой опоре, используемого в конструкции ближайшего аналога.
Следовательно, в выходном сигнале датчика угловой скорости кроме горизонтальной составляющей угловой скорости вращения Земли ωЗГ, измерение которой требует способ определения зенитного угла и азимута с помощью гироинклинометра, будет присутствовать составляющая ωОС, вызванная изменением угла ошибки стабилизации.
 ,
,
где ωизм - измеренная угловая скорость.
Теоретические предположения и экспериментальные данные подтверждают, что в ближайшем аналоге погрешность в выходном сигнале датчика угловой скорости от изменения угла ошибки стабилизации платформы оказывает заметное влияние на точность расчета траектории скважины.
В режиме начальной азимутальной ориентации при круговом вращении платформы и в режиме измерения при движении скважинного прибора угол ошибки стабилизации платформы не является стационарной величиной. Изменение угла ошибки стабилизации в большей степени связано с изменением трения в подшипниках платформы и с изменением характеристик датчика момента двигателя стабилизации.
Задачей, на решение которой направлены настоящие изобретения, является повышение точности начальной азимутальной ориентации непрерывного гироинклинометра, повышение точности определения азимутального угла скважины при зенитных углах Θ2>Θi>Θ1, повышение точности определения пространственного положения ствола протяженных наклонных и горизонтальных скважин непрерывным гироинклинометром, в том числе и скважин, расположенных на широтах более 65°, повышение технико-экономических показателей гироинклинометра.
Поставленная задача решается за счет того, что в способе определения зенитного угла и азимута скважины посредством гироскопического инклинометра, заключающемся в измерении ускорения силы тяжести по трем взаимно ортогональным осям чувствительности измерителей ускорения, измерении угловой скорости по оси чувствительности измерителя угловой скорости, совпадающей с осью чувствительности измерителя ускорения, которая ортогональна продольной оси скважинного прибора, стабилизации осей чувствительности измерителей ускорения и измерителя угловой скорости, причем ось стабилизации совпадает с продольной осью скважинного прибора, определении начальной азимутальной ориентации осей чувствительности измерителей ускорения, включающем связанное вращение осей чувствительности измерителей ускорения и измерителя угловой скорости вокруг продольной оси скважинного прибора с постоянной скоростью на заданный угол, в процессе которого непрерывно измеряют угол поворота осей чувствительности измерителей ускорения вокруг продольной оси скважинного прибора, угловую скорость по оси чувствительности измерителя угловой скорости, а по окончании связанного вращения осей чувствительности измерителей ускорения и измерителя угловой скорости включающем определение фазы сигнала угловой скорости по оси чувствительности измерителя угловой скорости, а затем определение по результатам измерений азимутального угла осей чувствительности измерителей ускорения на момент окончания начальной азимутальной ориентации, а также при движении скважинного прибора в скважине в вычислении азимута и зенитного угла скважины, используя азимутальный угол осей чувствительности измерителей ускорения на момент окончания начальной азимутальной ориентации, формировании матрицы ориентации и приращения матрицы ориентации на каждом такте времени работы вычислителя, проверяя выполнение условий по зенитному углу:
Θi≅Θ1, Θi≥Θ2; Θ2>Θi>Θ1,
где Θi - зенитный угол,
Θ1, Θ2 - константы,
согласно изобретению при определении начальной азимутальной ориентации осей чувствительности измерителей ускорения в процессе связанного вращения осей чувствительности измерителей ускорения и измерителя угловой скорости вокруг продольной оси скважинного прибора непрерывно на каждом такте времени работы вычислителя дополнительно измеряют значение напряжения UOC, пропорциональное углу ошибки стабилизации осей чувствительности измерителей ускорения и измерителя угловой скорости, на каждом такте времени работы вычислителя рассчитывают и записывают в массив значение погрешности измерителя угловой скорости от угла ошибки стабилизации по формуле:
 ,
,
где ωOC - погрешность измерителя угловой скорости от угла ошибки стабилизации,
i - номер элемента в записанном массиве, i=1, 2, …, n,
n - количество элементов в записанном массиве,
αOC - угол ошибки стабилизации осей чувствительности измерителей ускорения и измерителя угловой скорости, 
KДУ - коэффициент передачи датчика угла гироскопа, [В/°];
KУС - коэффициент усиления, [В/В];
Тгир - постоянная времени собственной прецессии гироскопа, [с],
по достижении заданного угла завершают связанное вращение осей чувствительности измерителей ускорения и измерителя угловой скорости вокруг продольной оси скважинного прибора, по результатам измерений рассчитывают угловую скорость без погрешности от угла ошибки стабилизации по формуле:
ω сум =K норм ·(ω изм -ω 0изм )-ω OC ,
где ωсум - угловая скорость без погрешности от угла ошибки стабилизации,
Kнорм - коэффициент нормирования,
ωизм - измеренная угловая скорость,
ω0изм - постоянная составляющая измеренной угловой скорости,
при этом методом итераций подбирают такое значение коэффициента нормирования Kнорм, при котором выполняется соотношение:
где ωЗГ - горизонтальная составляющая угловой скорости вращения Земли в проекции на вращающуюся вокруг продольной оси скважинного прибора с постоянной скоростью ωвр ось чувствительности измерителя угловой скорости:
ω ЗГ =ω З ·cos(φ шм )·sin(ω вр ·i),
где ωЗ - угловая скорость вращения Земли, ωЗ=15°/час,
φшм - широта места измерения,
запоминают вычисленный на последней итерации коэффициент нормирования Kнорм, а вычисленный на последней итерации массив ωсум запоминают как массив ωист истинной угловой скорости, определяют фазу гармонической характеристики, образованной элементами массива ωист истинной угловой скорости, после чего вычисляют азимутальный угол осей чувствительности измерителей ускорения на момент окончания начальной азимутальной ориентации.
Кроме того, при движении скважинного прибора в скважине непрерывно на каждом такте времени работы вычислителя дополнительно измеряют значение напряжения UOC, пропорциональное углу ошибки стабилизации осей чувствительности измерителей ускорения и измерителя угловой скорости, на каждом такте времени работы вычислителя рассчитывают значение погрешности измерителя угловой скорости от угла ошибки стабилизации по формуле:
где ωOC - погрешность измерителя угловой скорости от угла ошибки стабилизации,
αOC - угол ошибки стабилизации осей чувствительности измерителей ускорения и измерителя угловой скорости,
KДУ - коэффициент передачи датчика угла гироскопа, [В/°];
KУС - коэффициент усиления, [В/В];
Tгир - постоянная времени собственной прецессии гироскопа, [с],
рассчитывают на каждом такте времени работы вычислителя истинную угловую скорость, используя коэффициент нормирования Kнорм, подобранный итерационным методом при определении начальной азимутальной ориентации осей чувствительности измерителей ускорения, по формуле:
ωист=Kнорм·ωизм-ωOC,
где ωист - истинная угловая скорость,
ωизм - измеренная угловая скорость, используют значение истинной угловой скорости ωист при расчете азимута скважины при зенитном угле Θ2>Θi>Θ1, при оценке нулевого сигнала измерителя угловой скорости, при определении момента остановки скважинного прибора.
Одним существенным отличием предлагаемого способа является то, что при определении начальной азимутальной ориентации осей чувствительности измерителей ускорения в процессе связанного вращения осей чувствительности измерителей ускорения и измерителя угловой скорости вокруг продольной оси скважинного прибора непрерывно на каждом такте времени работы вычислителя дополнительно измеряют значение напряжения UOC, пропорциональное углу ошибки стабилизации осей чувствительности измерителей ускорения и измерителя угловой скорости. Другим существенным отличием предлагаемого способа является то, что на каждом такте времени работы вычислителя рассчитывают и записывают в массив значение погрешности измерителя угловой скорости от угла ошибки стабилизации по формуле:
где ωOC - погрешность измерителя угловой скорости от угла ошибки стабилизации,
αOC - угол ошибки стабилизации осей чувствительности измерителей ускорения и измерителя угловой скорости,
KДУ - коэффициент передачи датчика угла гироскопа, [В/°];
KУС - коэффициент усиления, [В/В];
Tгир - постоянная времени собственной прецессии гироскопа, [с].
Еще одним существенным отличием предлагаемого способа является то, что по достижении заданного угла завершают связанное вращение осей чувствительности измерителей ускорения и измерителя угловой скорости вокруг продольной оси скважинного прибора, по результатам измерений рассчитывают угловую скорость без погрешности от угла ошибки стабилизации по формуле:
ωсум=Kнорм·(ωизм-ω0изм)-ωOC,
где ωсум - угловая скорость без погрешности от угла ошибки стабилизации,
Kнорм - коэффициент нормирования,
ωизм - измеренная угловая скорость,
ω0изм - постоянная составляющая измеренной угловой скорости,
при этом методом итераций подбирают такое значение коэффициента нормирования Kнорм, при котором выполняется соотношение:
где ωЗГ - горизонтальная составляющая угловой скорости вращения Земли в проекции на вращающуюся вокруг продольной оси скважинного прибора с постоянной скоростью ωвр ось чувствительности измерителя угловой скорости:
ωЗГ=ωЗ·cos(φшм)·sin(ωвр·i),
где ωЗ - угловая скорость вращения Земли, ωЗ=15°/час,
φшм - широта места измерения,
запоминают вычисленный на последней итерации коэффициент нормирования Kнорм, а вычисленный на последней итерации массив ωсум запоминают как массив ωист истинной угловой скорости. Также существенным отличием предлагаемого способа является то, что определяют фазу гармонической характеристики, образованной элементами массива ωист истинной угловой скорости, после чего вычисляют азимутальный угол осей чувствительности измерителей ускорения на момент окончания начальной азимутальной ориентации.
Другим существенным отличием предлагаемого способа является то, что при движении скважинного прибора в скважине непрерывно на каждом такте времени работы вычислителя дополнительно измеряют значение напряжения UOC пропорциональное углу ошибки стабилизации осей чувствительности измерителей ускорения и измерителя угловой скорости. Также существенным отличием предлагаемого способа является то, что на каждом такте времени работы вычислителя рассчитывают значение погрешности измерителя угловой скорости от угла ошибки стабилизации по формуле:
где ωOC - погрешность измерителя угловой скорости от угла ошибки стабилизации,
αOC - угол ошибки стабилизации осей чувствительности измерителей ускорения и измерителя угловой скорости,
KДУ - коэффициент передачи датчика угла гироскопа, [В/°];
KУС - коэффициент усиления, [В/В];
Тгир - постоянная времени собственной прецессии гироскопа, [с],
рассчитывают на каждом такте времени работы вычислителя истинную угловую скорость, используя коэффициент нормирования Kнорм, подобранный итерационным методом при определении начальной азимутальной ориентации осей чувствительности измерителей ускорения, по формуле:
ω ист =K норм ·ω изм -ω OC ,
где ωист - истинная угловая скорость,
ωизм - измеренная угловая скорость.
Еще одним существенным отличием предлагаемого способа является то, что используют значение истинной угловой скорости ωист при расчете азимута скважины при зенитном угле Θ2>Θi>Θ1, при оценке нулевого сигнала измерителя угловой скорости, при определении момента остановки скважинного прибора.
В соответствии со способом предложено устройство, содержащее блок обработки информации, включающий однокристальную ЭВМ и приемопередатчик, датчик информации, включающий одноосный гиростабилизатор, состоящий из корпуса, расположенной внутри него вращающейся платформы, двигателя стабилизации, кинематически связанного с осью стабилизации одноосного гиростабилизатора, совпадающей с продольной осью скважинного прибора, причем на вращающейся платформе установлены два акселерометра со взаимно ортогональными осями чувствительности, ориентированными перпендикулярно оси стабилизации одноосного гиростабилизатора, двухкомпонентный индикаторный трехстепенной гироскоп с датчиками угла и момента, а также ротор синусно-косинусного трансформатора, а на корпусе установлен третий акселерометр с осью чувствительности, совпадающей с осью стабилизации одноосного гиростабилизатора, и статор синусно-косинусного трансформатора, а также содержащее канал стабилизации платформы, включающий усилитель, согласно изобретению в электрическую схему усилителя канала стабилизации платформы введен дополнительный выход, соединенный с дополнительным каналом обработки информации, введенным в блок цифровой обработки.
Существенным отличием предлагаемого устройства является то, что в электрическую схему усилителя канала стабилизации платформы введен дополнительный выход, соединенный с дополнительным каналом обработки информации, введенным в блок цифровой обработки, для определения напряжения пропорционального ошибке стабилизации одноосного гиростабилизатора.
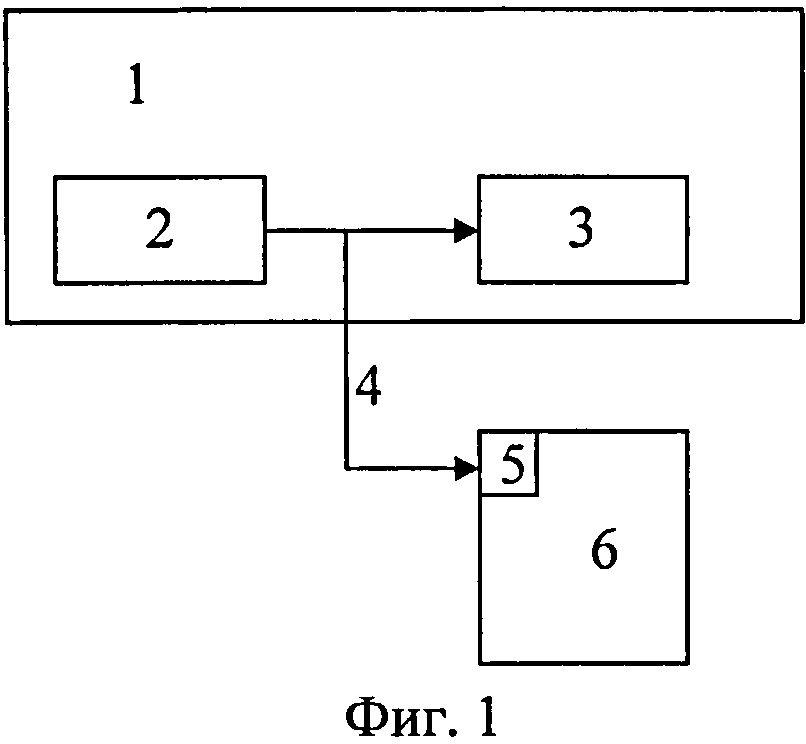
Сущность изобретений поясняется чертежом, где приведена схема включения резервного канала.
На чертеже введены следующие обозначения:
1 - усилитель канала стабилизации платформы;
2 - предварительный каскад;
3 - выходной каскад;
4 - дополнительный выход;
5 - дополнительный канал обработки информации;
6 - блок цифровой обработки.
Скважинный прибор непрерывного гироскопического инклинометра содержит датчик информации, включающий одноосный гиростабилизатор, состоящий из корпуса, расположенной внутри него вращающейся платформы, двигателя стабилизации, кинематически связанного с осью стабилизации одноосного гиростабилизатора, совпадающей с продольной осью скважинного прибора. На вращающейся платформе установлены ротор синусно-косинусного трансформатора (СКТ), два акселерометра со взаимно ортогональными осями чувствительности, ориентированными перпендикулярно оси стабилизации одноосного гиростабилизатора, а также двухкомпонентный индикаторный трехстепенной гиродатчик на сферической шарикоподшипниковой опоре (гироскоп), ось кинетического момента которого перпендикулярна плоскости платформы и совпадает с измерительной осью одного из акселерометров. Один измерительный канал гироскопа предназначен для выдачи информации об угловой скорости по оси чувствительности датчика угловой скорости, перпендикулярной вектору кинетического момента гироскопа и совпадающей с осью одного акселерометра. На базе второго измерительного канала гироскопа выполнен одноосный гиростабилизатор, позволяющий «развязать» угловое движение корпуса и платформы вокруг продольной оси прибора. На корпусе датчика информации установлен статор СКТ, а также третий акселерометр с осью чувствительности, совпадающей с осью стабилизации одноосного гиростабилизатора. В гироинклинометре СКТ используется для определения углового положения осей чувствительности акселерометров относительно корпуса скважинного прибора.
Специфика работы алгоритмов непрерывного гироинклинометра, содержащего платформу, такова, что непосредственно перед началом измерения траектории скважины, выполняемого при движении скважинного прибора в скважине, необходимо определить начальную азимутальную ориентацию осей приборной системы координат скважинного прибора относительно осей географической системы координат, причем приборную систему координат скважинного прибора определяют оси датчиков первичной информации, которые установлены на платформе.
Анализ состояния нефтегазодобывающей отрасли показал, что развитие данной отрасли идет в направлении освоения северного сектора с широтами более 65° и бурения протяженных наклонных и горизонтальных скважин. В связи с этим инклинометрическое оборудование должно обеспечить, в том числе при исследовании скважин в области высоких широт: при начальной азимутальной ориентации - высокую точность ориентации осей приборной системы координат относительно осей земной системы координат; в режиме измерения - непрерывное определение с высокой точностью азимута и зенитного угла ствола наклонных и горизонтальных скважин.
Для конструкции гироскопа на сферической шарикоподшипниковой опоре известно, что сигнал, пропорциональный углу ошибки стабилизации платформы (углу отклонения ротора гироскопа от нулевого положения), воспринимается каналом датчика угловой скорости. Погрешность датчика угловой скорости от угла ошибки стабилизации является причиной погрешности при определении начальной азимутальной ориентации осей чувствительности акселерометров, при определении азимута в режиме измерения скважины, при оценке нулевого сигнала измерителя угловой скорости и при определении момента остановки скважинного прибора.
Таким образом, погрешность датчика угловой скорости от угла ошибки стабилизации платформы приводит к значительной погрешности при определении траектории протяженных наклонных и горизонтальных скважин, особенно на высоких широтах.
В основе предлагаемого способа определения зенитного угла и азимута скважины посредством гироскопического инклинометра лежит идея исключения погрешности датчика угловой скорости от угла ошибки стабилизации платформы с целью повышения точности определения траектории скважин.
В предлагаемом способе принимается, что некоторые параметры системы стабильны, а именно:
- крутизна датчиков угла гироскопа;
- коэффициент передачи усилителя стабилизации от датчика угла до точки съема напряжения, пропорционального ошибке стабилизации;
- постоянная времени собственной прецессии гироскопа;
Для реализации предложенного способа в конструкцию ближайшего аналога, внесено дополнение (см. фиг.1), а именно в электрическую схему усилителя канала стабилизации платформы 1 после предварительного каскада 2 и до выходного каскада 3 введен дополнительный выход 4, соединенный с дополнительным каналом обработки информации 5, введенным в блок цифровой обработки 6. Дополнительный выход 4 используется для определения напряжения, пропорционального ошибке стабилизации платформы.
В реальных полевых условиях на скважине предложенные изобретения реализуются следующим образом:
1. При начальной азимутальной ориентации:
Скважинный прибор гироинклинометра устанавливают на устье скважины в вертикальном положении и для обеспечения его неподвижности прибор фиксируют с помощью специальных зажимов. Включают и устанавливают зенитный угол по показаниям акселерометров. Выполняют первый шаг начальной азимутальной ориентации по следующей методике:
1.1 Вращают платформу с расположенными на ней датчиками первичной информации вокруг оси стабилизации с постоянной угловой скоростью на заданный угол, равный целому количеству оборотов платформы, что необходимо для корректного выполнения дальнейших расчетов.
Во время вращения платформы непрерывно на каждом такте времени работы вычислителя измеряют сигналы с датчиков первичной информации, в том числе: выходной сигнал датчика угловой скорости - измеренная угловая скорость ωизм, сигнал с дополнительного выхода 4 (см. фиг. 1) - напряжение, пропорциональное углу ошибки стабилизации платформы, UOC.
На основе измеренной первичной информации на каждом такте времени работы вычислителя рассчитывают и записывают в массив значение погрешности измерителя угловой скорости от угла ошибки стабилизации по формуле:
где ωOC - погрешность датчика угловой скорости от угла ошибки стабилизации,
i - номер элемента в записанном массиве, i=1, 2, …, n,
n - количество элементов в записанном массиве,
αOC - угол ошибки стабилизации платформы,
KДУ - коэффициент передачи датчика угла гироскопа, [В/°];
KУС - коэффициент усиления, [В/В];
Тгир - постоянная времени собственной прецессии гироскопа [с].
1.2 По достижении заданного угла завершают вращение платформы вокруг продольной оси скважинного прибора и по результатам измерений рассчитывают угловую скорость без погрешности от угла ошибки стабилизации по формуле:
ωсум=Kнорм·(ωизм-ω0изм)-ωOC,
где ωсум - угловая скорость без погрешности от угла ошибки стабилизации,
Kнорм - коэффициент нормирования,
ωизм - измеренная угловая скорость,
ωизм - постоянная составляющая измеренной угловой скорости.
Амплитуда гармонической характеристики, образованной элементами массива ωсум, должна соответствовать горизонтальной составляющей угловой скорости вращения Земли на широте места измерения скважины. Данное равенство обеспечивается нормированием амплитуды измеренной угловой скорости ωизм. Для этого методом итераций подбирают такое значение коэффициента нормирования Kнорм, при котором выполняется соотношение:
где ωЗГ - горизонтальная составляющая угловой скорости вращения Земли в проекции на вращающуюся вокруг продольной оси скважинного прибора с постоянной скоростью ωвр ось чувствительности измерителя угловой скорости:
ωЗГ=ωЗ·cos(φшм)·sin(ωвр·i),
где ωЗ - угловая скорость вращения Земли, ωЗ=15°/час,
φшм - широта места измерения.
Вычисленный на последней итерации массив ωсум запоминают как массив ωист истинной угловой скорости.
1.3 Определяют фазу гармонической характеристики, образованной элементами массива ωист истинной угловой скорости. Далее используют алгоритмы начальной азимутальной ориентации, которые являются общеизвестными, и затем определяют азимутальный угол осей чувствительности измерителей ускорения на момент окончания начальной азимутальной ориентации.
1.4 Повторяют методику по 1.1-1.3 не менее трех раз, причем каждый дополнительный шаг начальной азимутальной ориентации увеличивает объем данных в массивах и увеличивает точность начальной азимутальной ориентации. Коэффициент нормирования Kнорм, подобранный методом итераций на последнем шаге начальной азимутальной ориентации, запоминают как константу.
2. При измерении траектории скважины:
2.1 Во время спуска скважинного прибора на каждом такте времени работы вычислителя измеряют сигналы с датчиков первичной информации, в том числе: выходной сигнал датчика угловой скорости - измеренная угловая скорость ωизм, сигнал с дополнительного выхода 4 (см. фиг. 4) - напряжение, пропорциональное углу ошибки стабилизации, UOC.
На основе первичной информации на каждом такте времени работы вычислителя рассчитывают значение погрешности измерителя угловой скорости от угла ошибки стабилизации по формуле:
где ωOC - погрешность измерителя угловой скорости от угла ошибки стабилизации,
αOC - угол ошибки стабилизации осей чувствительности измерителей ускорения и измерителя угловой скорости,
KДУ - коэффициент передачи датчика угла гироскопа, [В/°];
KУС - коэффициент усиления, [В/В];
Тгир - постоянная времени собственной прецессии гироскопа, [с].
2.2 На каждом такте времени работы вычислителя рассчитывают истинную угловую скорость, используя коэффициент нормирования Kнорм, подобранный итерационным методом при определении начальной азимутальной ориентации осей чувствительности измерителей ускорения, по формуле:
ω ист =K норм ·ω изм -ω OC ,
где ωист - истинная угловая скорость,
ωизм - измеренная угловая скорость.
Используют значения ωист истинной угловой скорости при расчете азимута скважины при зенитном угле Θ2>Θi>Θ1, при оценке нулевого сигнала датчика угловой скорости, при определении момента остановки скважинного прибора.
По сравнению со способом ближайшего аналога предлагаемый способ определения зенитного угла и азимута скважины и гироинклинометр позволяют исключить погрешность в сигнале датчика угловой скорости от угла ошибки стабилизации платформы, а значит, при начальной азимутальной ориентации - повысить точность расчета азимутального угла осей чувствительности измерителей ускорения, в режиме измерения - повысить точность определения азимута при зенитном угле Θ2>Θi>Θ1, повысить качество процедуры по оценке нулевого сигнала датчика угловой скорости, повысить точность определения момента остановки скважинного прибора.
Обеспеченные способом и устройством положительные эффекты за счет введения дополнительных операций, алгоритмов и связей позволяют повысить точность определения пространственного положения ствола протяженных наклонных и горизонтальных скважин непрерывным гироскопическим инклинометром, в том числе и скважин, расположенных на широтах более 65°, тем самым устранить основной недостаток способа и устройства ближайшего аналога.
Источники информации
1. Патент РФ №2101487, Е21В 47/022, G01C 19/00, 1998 г.
2. Патент РФ №2159331, Е21В 47/022, 1999 г.
Интегрированная система резервных приборов
Чувствительный элемент углового акселерометра
Способ диффузионной сварки многослойного пакета из стекла и монокристаллического кремния
Способ начальной азимутальной ориентации непрерывного гироскопического инклинометра и устройство для его осуществления
Магнитная система динамически настраиваемого гироскопа
Система и способ определения пространственного положения и курса летательного аппарата
Радиоэлектронный блок
Магниторезистивный датчик перемещений
Устройство для измерения динамических характеристик навигационных приборов, в состав которых входит вращающийся трансформатор
Способ оценки ошибок и контроля датчиков первичной информации в составе бесплатформенной инерциальной навигационной системы в наземных условиях и устройство для его осуществления
Интегрированная система резервных приборов
Чувствительный элемент углового акселерометра
Способ диффузионной сварки многослойного пакета из стекла и монокристаллического кремния
Способ изготовления упругого подвеса динамически настраиваемого гироскопа
Устройство для обнаружения короткозамкнутых витков в электрических катушках
Способ начальной азимутальной ориентации непрерывного гироскопического инклинометра и устройство для его осуществления
Магнитная система динамически настраиваемого гироскопа
Система и способ определения пространственного положения и курса летательного аппарата
Радиоэлектронный блок
Магниторезистивный датчик перемещений

