Результат интеллектуальной деятельности: ИСПЫТАТЕЛЬНЫЙ СТЕНД
Вид РИД
Изобретение
Изобретение относится к приборостроению, в частности, к стендовой испытательной аппаратуре, предназначенной для пространственной ориентации объектов контроля, чувствительных к угловым перемещениям.
Известны испытательные стенды, предназначенные для испытаний приборов чувствительных к углу проворота [1].
Наиболее близким к предлагаемому изобретению по технической сущности и достигаемому эффекту является испытательный стенд [2], содержащий основание, наружную и внутреннюю рамы, образующие карданов подвес, два круговых измерителя угловых положений рам и электроприводы их поворота, при этом грузовая платформа стенда размещена непосредственно на внутренней раме с вертикальной осью вращения, а наклон грузовой платформе может быть задан поворотом наружной рамы с горизонтальной осью вращения. Указанное устройство имеет недостаток, заключающийся в низкой точности задания угловых положений испытуемому объекту, обусловленной деформацией элементов в месте соединения внутренней и наружной рам, а также деформациями рам и основания стенда при наклонах наружной рамы, в результате чего угол наклона наружной рамы может быть не равен углу наклона прибора.
Целью настоящего изобретения является повышение точности пространственной ориентации испытуемого прибора путем исключения влияния деформаций рам, основания стенда и элементов соединения рам между собой на угловое положение прибора.
Указанная цель достигается тем, что в упомянутый стенд введены дополнительный карданов подвес с наружной и внутренней рамками, двухкоординатный акселерометр, закрепленный на внутренней рамке так, что оси его чувствительности взаимно перпендикулярно в горизонтальной плоскости, а одна из осей чувствительности параллельна оси вращения внутренней рамки дополнительного карданова подвеса, и дополнительные два электропривода поворота соответственно наружной и внутренней рамок, при этом один из круговых измерителей угловых перемещений закреплен на наружной рамке и вал его соединен с осью внутренней рамки дополнительного карданова подвеса, при этом один дополнительный электропривод своим корпусом закреплен на внутренней рамке стенда, его подвижная часть соединена с наружной рамкой дополнительного карданова подвеса, а ось вращения соосна с осью вращения внутренней рамы стенда.
Для представления сущности заявляемого устройства, установим на горизонтальную ось наружной рамы, поворот вокруг которой обеспечивает наклон грузовой платформы, круговой измеритель угловых перемещений и закрепим его корпус таким образом, чтобы вал этого кругового измерителя угловых перемещений был параллелен с осью поворота наружной рамы, а, следовательно, и с осью наклона грузовой платформы. Установим грузовую платформу в горизонт. На валу кругового измерителя угловых перемещений при нулевом его положении закрепим груз, центр тяжести которого смещен относительно вала и который в совокупности с валом, установленным в корпусе с возможностью свободного вращения, образует маятник. В результате, при наклонах платформы, положение вала измерителя угловых перемещений под действием маятника будет оставаться неподвижным относительно горизонта, а сам измеритель будет давать информацию о величине наклона платформы (с обратным знаком).
Если надо задать наклон платформе, то сначала надо установить поворотом вала измерителя угловых перемещений этот угол наклона и зафиксировать заданное положение вала с помощью маятника. Затем платформу вращать до тех пор, пока измеритель не выдаст нулевой сигнал.
В настоящих рассуждениях сделаны два допущения:
1. Маятник, образованный грузом со смещенным центром тяжести относительно вала, идеальный (отсутствует трение).
2. При закреплении маятниковой массы на валу кругового измерителя угловых перемещений его положение не сбивается.
Реальное решение задачи задания наклона платформы осуществляется путем установки акселерометра на валу измерителя и электропривода поворота вала измерителя.
Акселерометр представляет собой маятниковое устройство, имеющее массу, подвешенную на свободной от трения точечной опоре, и датчик угла отклонения массы от нулевого (среднего) положения относительно корпуса акселерометра в измерительной плоскости.
Установим грузовую платформу стенда в горизонт в плоскости вращения и согласуем в этом положении платформы нуль акселерометра с нулем измерителя наклона. Электропривод закрепим на платформе, а выходной вал его соединим с валом измерителя. Соединим электрически выход датчика угла акселерометра через усилитель с электроприводом вала измерителя.
Задание требуемого углового положения платформе по наклону с помощью рассматриваемого устройства решается так: с устройства управления задают требуемое значение угла наклона и производят сравнение его значения с фактическим, считываемым с измерителя. С помощью сигналов о величине и о знаке рассогласования управляют электроприводом поворота вала измерителя. После окончания отработки рассогласования, соответствующий сигнал с датчика угла акселерометра подают через усилитель на электропривод наклона платформы. После обнуления сигнала с акселерометра платформа будет иметь заданный угол наклона.
В связи с тем, что заявляемый стенд является двухосным устройством, обеспечивающим измерение угловых координат, заданных установленному на платформу стенда испытуемому прибору, в него введен дополнительный карданов подвес с наружной и внутренней рамками.
В заявляемом двухосном стенде применен двухкоординатный акселерометр, закрепленный на внутренней рамке дополнительного карданова подвеса, обеспечивающий выдачу информации об отклонениях его от вертикали в двух взаимно перпендикулярных измерительных плоскостях, каждая из которых перпендикулярна оси соответствующей рамки дополнительного карданова подвеса. Один из круговых измерителей угловых перемещений перенесен на наружную рамку дополнительного карданова подвеса, при этом вал этого кругового измерителя угловых перемещений соединен с осью внутренней рамки дополнительного карданова подвеса.
Электроприводы наружной и внутренней рамок карданова подвеса введены для поворота этих рамок и поворота вала кругового измерителя угловых перемещений внутренней рамки по сигналам акселерометра.
Такое исполнение стенда обеспечивает выполнение цели изобретения: повышение точности задания угловых координат испытуемого прибора благодаря тому, что последний жестко закреплен на платформе, установленной на внутренней раме стенда, а положение внутренней рамы определяется непосредственным измерением ее положения с помощью измерителей угловых перемещений. Люфт в межрамном соединении стенда, упругие деформации и их изменение, а также деформации элементов механических связей между наружной и внутренней рамами стенда, не вносят погрешности в угловые координаты, определяющие положение испытуемого прибора в пространстве.
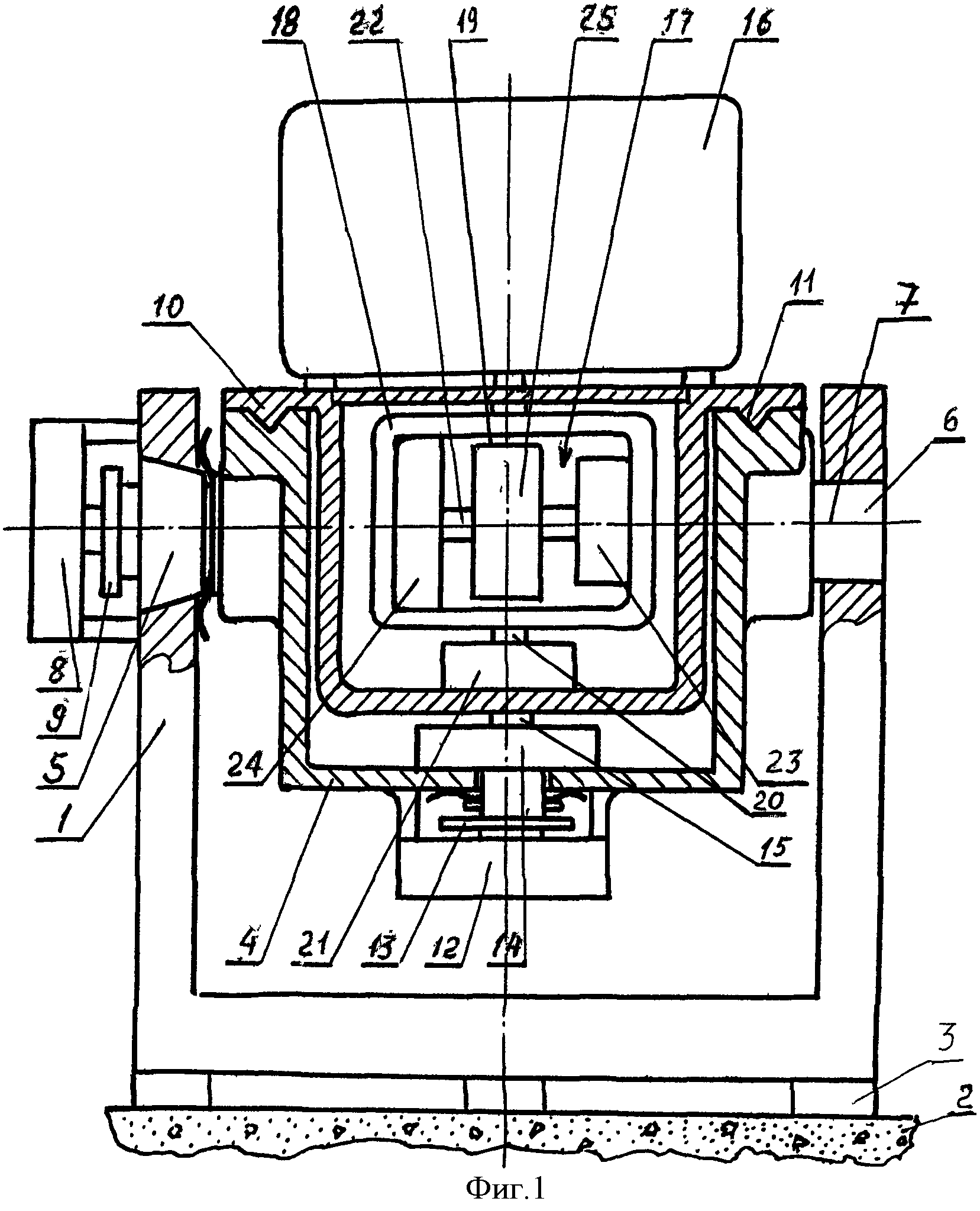
На фиг.1 представлен схематический чертеж испытательного стенда.
На фиг.2 представлена структурная схема управления испытательного стенда.
Испытательный стенд (фиг.1) содержит основание 1, опирающееся на фундамент 2, с помощью специальных регулируемых опор 3, наружную раму 4, установленную в основании 1 посредством конусной цапфы 5 и цилиндрической цапфы 6 с возможностью вращения вокруг оси 7, электропривод 8 разворота наружной рамы 4, соединенный муфтой 9 с цапфой 5 наружной рамы 4, внутреннюю раму 10, установленную с помощью кольцевой призматической направляющей опоры скольжения 11 с возможностью вращения в наружной раме 4, электропривод 12 разворота внутренней рамы 10, соединенный с внутренней рамой муфтой 13, и круговой измеритель угловых перемещений 14 внутренней рамы 10 относительно наружной рамы 4, при этом вал кругового измерителя угловых перемещений 14 является механическим продолжением оси вращения 15 внутренней рамы 10 относительно наружной рамы 4.
На платформе, жестко установленной на внутренней раме 10, закреплен испытуемый прибор 16. В полости внутренней рамы 10 установлен дополнительный карданов подвес 17 с поворотными рамками: наружной 18 и внутренней 19. Ось вращения 20 наружной рамки 18 параллельна в исходном состоянии оси вращения 15 внутренней рамы 10. Ось вращения 20 наружной рамки 18 соединена с электроприводом 21 разворота наружной рамки 18 относительно внутренней рамы 10. Ось вращения 22 внутренней рамки 19 соединена механически с подвижной частью электропривода 23, закрепленного своим корпусом на наружной рамке 18, и подвижной частью кругового измерителя угловых перемещений 24, который своим корпусом также закреплен на наружной рамке 18. На внутренней рамке 19 закреплен двухкоординатный акселерометр 25, представляющий собой в данном примере исполнения маятниковое устройство, имеющее маятниковую массу, подвешенную на свободной от трения точечной опоре, и два датчика угла 26 и 27, каждый из которых предназначен для определения углового положения маятниковой массы (находятся внутри корпуса двухкоординатного акселерометра, на чертеже фиг.1 не показаны) относительно соответствующей оси чувствительности. Оси чувствительности акселерометра 25 расположены взаимно перпендикулярно в горизонтальной плоскости, причем одна из осей чувствительности параллельна оси вращения внутренней рамки 19.
Первый датчик угла 26 акселерометра 25 (фиг.2), работающий в вертикальной измерительной плоскости, перпендикулярной оси вращения внутренней рамки 19, электрически соединен с первым усилителем 28, который, в свою очередь, соединен с первым блоком управления 29, электрически связанным с электроприводом 8 разворота (наклона) наружной рамы 4. Электропривод 8 механически соединен с корпусом акселерометра 25 (через наружную раму 4, внутреннюю раму 10, наружную рамку 18 и внутреннюю рамку 19).
Второй датчик угла 27 акселерометра 25, работающий в вертикальной измерительной плоскости, параллельной оси вращения внутренней рамки 19, электрически соединен со вторым усилителем 30, со вторым блоком управления 31, электрически связанным с электроприводом 21 разворота наружной рамки 18.
Электропривод 21 разворота внутренней рамки 19 относительно наружной рамки 18 механически соединен с акселерометром 25 (через наружную рамку 18 и внутреннюю рамку 19).
Круговой измеритель угловых перемещений 24, с которого снимается информация об изменении ориентации внутренней рамки 19 относительно плоскости наружной рамки 18, электрически соединен с первым блоком преобразования и формирования импульсов 32 прямого и обратного хода. Блок 32 соединен с реверсивным счетчиком-индикатором 33, предназначенным для выработки информации о положении вала 22 кругового измерителя угловых перемещений 24 и для представления информации в виде, удобном для визуального наблюдения (в угловых градусах, угловых минутах и угловых секундах). Реверсивный счетчик-индикатор 33 соединен электрически с первым устройством сравнения 34 имеющим электрическую связь с программным задающим устройством 35 и с третьим блоком управления 36, выход которого соединен с электроприводом 23 разворота внутренней рамки 19. Электропривод 23 механически соединен с круговым измерителем угловых перемещений 24 и с акселерометром 25.
Круговой измеритель угловых перемещений 14 внутренней рамы 10 соединен электрически со вторым блоком преобразования и формирования импульсов прямого и обратного хода 37, выход которого соединен со вторым реверсивным счетчиком-индикатором 38, предназначенным для выработки этой информации о положении вала кругового измерителя угловых перемещений 14 внутренней рамы 10 относительно наружной рамы 4 и для представления этой информации в виде, удобном для визуального наблюдения (в угловых градусах, минутах и секундах).
В свою очередь второй реверсивный счетчик-индикатор 38 соединен электрически со вторым устройством сравнения 39, имеющим электрическую связь с программным задающим устройством 35 и с четвертым блоком управления 40, выход которого соединен с электроприводом 12 разворота внутренней рамы 10. Электропривод 12 механически соединен с круговым измерителем угловых перемещений 14 внутренней рамы 10 относительно наружной рамы 4.
Устройство работает следующим образом:
1. Задающее устройство 35 выдает на устройство сравнения 39 информацию о значении задаваемого углового положения внутренней раме 10. С измерителя угловых перемещений 14 через блоки 37 и 38, информация о текущем значении угла поворота внутренней рамы 10 поступает на устройство сравнения 39. С устройства сравнения 39 на блок управления 40 поступает сигнал о наличии и о знаке рассогласования между имеющимся и задаваемым значением углового положения внутренней рамы 10. Блок управления 40 включает привод 12, который вращает внутреннюю раму 10 и измеритель угловых перемещений 14 до тех пор, пока не исчезнет сигнал рассогласования между задаваемым и текущим значением углового положения внутренней рамы 10. Внутренняя рама 10 и измеритель угловых перемещений 14 останавливаются и удерживаются в покое с помощью тормозного действия кольцевой направляющей опоры скольжения 11.
2. Одновременно задающее устройство 35 выдает на устройство сравнения 34 информацию о значении задаваемого наклона испытуемому прибору вокруг оси вращения наружной рамы 4. С измерителя угловых перемещений 24 через блоки 32 и 33, информация о текущем значении угла поворота внутренней рамки 19 поступает на устройство сравнения 34. С него на блок управления 36 поступает сигнал о наличии и о знаке рассогласования между имеющимся и задаваемым значением углового положения внутренней рамки 19. Блок управления 36 включает привод 23 внутренней рамки 19, который вращает рамку 19 до тех пор, пока не исчезнет сигнал.
3. Предварительно приводят ось 22 внутренней рамки 19 в положение, параллельное оси 7 наружной рамы 4 стенда, для чего задающее устройство 35 включает акселерометр 25. При этом с датчика угла 27 акселерометра 25, выдающего информацию об отклонении маятника акселерометра в измерительной плоскости, параллельной оси 22 вращения внутренней рамки 19, сигнал поступает на усилитель 30, а усиленный сигнал подается на блок управления 31, который обеспечивает включение электропривода 21 и управление скоростью вращения его в соответствии с величиной сигнала. Электропривод 21 вращает наружную рамку 18 дополнительного карданова подвеса до тех пор, пока не исчезнет сигнал с датчика угла 27 акселерометра 25 относительно оси чувствительности перпендикулярной оси вращения рамки 19, т.е. пока ось вращения рамки 19 не станет горизонтальной (параллельной оси вращения 7 наружной рамы 4 стенда).
4. Одновременно по другому каналу с датчика угла 26 акселерометра 25, сигнал о наличии отклонения маятника поступает на усилитель 28, а затем, усиленный, поступает на блок управления 29, обеспечивающий включение двигателя привода 8 как в соответствии со знаком, так и скоростью вращения, в зависимости от знака и величины сигнала с блока управления 29. Привод 8 вращает через муфту 9 наружную раму 4 до тех пор, пока акселерометр 25 не примет положение, соответствующее началу зоны чувствительности его датчика угла 26. В этом положении наружная рама 4 удерживается тормозным действием конусной опоры скольжения 5.
5. Производят окончательное приведение оси 22 внутренней рамки 19 в положение, параллельное оси 7 наружной рамы 4, как описано в п.3 настоящего раздела.
6. Производят окончательное приведение наружной рамы 4 в заданное угловое положение, как описано в п.4 настоящего раздела, при этом привод 8 вращает наружную раму 4 до тех пор, пока сигнал с датчика угла 26 акселерометра 25 не станет равным нулю.
Эффективность предлагаемого изобретения заключается в повышении точности задания угловых положений испытуемым приборам при испытаниях их на двухосном наклонно-поворотном стенде. Повышение точности достигается за счет исключения влияния угловых перемещений внутренней рамы относительно наружной (вызванных люфтами и деформациями элементов межрамного соединения) при наклонах наружной рамы стенда, на точность угловых перемещений испытуемых приборов.
Источники информации
1. Великобритания, пат. №957163, C010 25/00 с приоритетом от 8.09.89 г.
2. СССР, заявка №4736636 по классу C010 25/00. 1989 г.
Выдачное решение №4736636/10-116339 от 28.06.91 г. (прототип).
Испытательный стенд, содержащий основание, наружную и внутреннюю рамы, образующие карданов подвес с горизонтальной осью наружной рамы, два круговых измерителя угловых перемещений рам и электроприводы их поворота, отличающийся тем, что, с целью повышения точности, в него введены дополнительный карданов подвес с наружной и внутренней рамками, двухкоординатный акселерометр, закрепленный на внутренней рамке, так, что оси его чувствительности взаимно перпендикулярны в горизонтальной плоскости, а одна из осей чувствительности параллельна оси вращения внутренней рамки дополнительного карданова подвеса, и дополнительные два электропривода поворота соответственно наружной и внутренней рамок, один из круговых измерителей угловых перемещений закреплен на наружной рамке и вал его соединен с осью внутренней рамки дополнительного карданова подвеса, при этом один дополнительный электропривод своим корпусом закреплен на внутренней раме стенда, его подвижная часть соединена с наружной рамкой дополнительного карданова подвеса, а ось вращения соосна с осью вращения внутренней рамы стенда.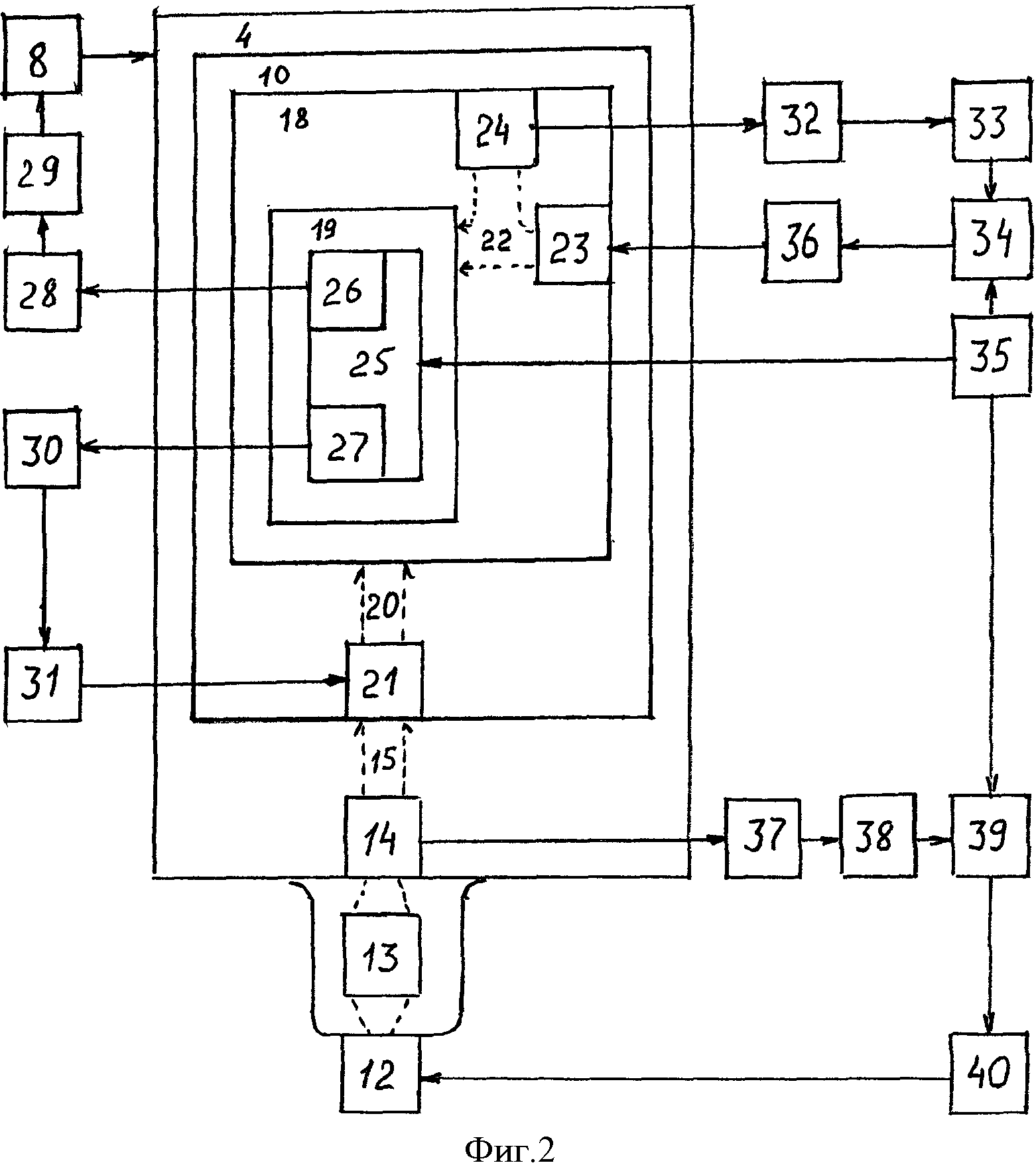
Устройство для охлаждения и очистки газообразного гелия
Транспортно-установочный агрегат стартового ракетного комплекса
Технический комплекс космодрома для подготовки к пуску на стартовом комплексе ракет-носителей
Технический комплекс космодрома для подготовки к пуску ракеты-носителя с космической головной частью, содержащей разгонный блок и космический аппарат
Пневмогидравлический амортизатор
Способ амортизации
Высокотемпературная установка для термической переработки твердых медицинских отходов
Устройство тестирования электронного блока волоконно-оптического гироскопа
Способ определения положения центра масс
Способ и устройство позиционирования в пространстве гироприбора при его испытаниях
Устройство для охлаждения и очистки газообразного гелия
Транспортно-установочный агрегат стартового ракетного комплекса
Технический комплекс космодрома для подготовки к пуску на стартовом комплексе ракет-носителей
Технический комплекс космодрома для подготовки к пуску ракеты-носителя с космической головной частью, содержащей разгонный блок и космический аппарат
Пневмогидравлический амортизатор
Способ амортизации
Устройство тестирования электронного блока волоконно-оптического гироскопа
Способ определения положения центра масс
Способ и устройство позиционирования в пространстве гироприбора при его испытаниях
Испытательный стенд

