Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЦЕНТРА МАСС
Вид РИД
Изобретение
Способ предназначен для определения положения центра масс статически неопределимого многоопорного объекта, установленного на маятниковом подвесе с упругими связями, имеющими нелинейно-упругие характеристики, преимущественно с пневмогидравлическими амортизаторами с двухштоковой компоновочной схемой. Он применим для объектов энерго-, тяжелого и транспортного машиностроения, например, для крупногабаритных энергоблоков атомных электростанций.
Известен аналог - способ определения центра масс автомобиля (Автор: Пресняков В.А. «Лабораторный практикум в программе курса «Конструкция, расчет и потребительские свойства автомобилей» Владивостокский государственный университет экономики и сервиса, источник расположен в Интернет-ресурсе по адресу:
http://abc.vvsu.ru/Books/svovstvaauto/page0003.asp).
В аналоге положение центра масс двухосного автомобиля в трехмерной системе координат определяется экспериментально при помощи тали и крановых весов в процедуре многократного взвешивания. При этом взвешивание проводится сначала для горизонтального расположения автомобиля. Затем его последовательно с помощью тали поднимают в продольном и боковом направлениях, получая углы наклона по этим направлениям не менее 10-15 градусов. Для каждого из этих положений повторяют операцию взвешивания, определяя изменения нагрузок, приходящихся на весы и таль. Расположение центра масс определяется аналитически, путем расчета по правилам механики используя уравнения моментов относительно одной из точек опоры или подвеса.
В качестве способа-прототипа принят способ определения положения центра масс самолета, также основанный на процедуре многократного взвешивания. Значение равнодействующей силы веса всех частей самолета определяют по сумме весов его составных частей, расходуемых материалов (ГСМ), полезной нагрузки. Вектор равнодействующей силы тяжести проходит через некоторую воображаемую точку самолета, называемую центром тяжести. Указанный способ приведен в методическом материале «Аэродинамика самолета» и представлен на нескольких Интернет-источниках, например:
http://svetlana-kapanina.ru/d/102034/d/ustoychivost_upravlyaemost_samoleta.pdf
httn://aviacliib.ru/uploads/media/Aehrodinamika_samoljota.pdf (Фиг.0).
При определении положения центра тяжести самолет устанавливается на весы в двух положениях, как показано выше. При каждом взвешивании замеряют показания передних и задних весов. Зная расстояние между весами и показания передних и задних весов в обоих случаях, по правилам механики определяют для каждого из этих положений самолета величину равнодействующей силы и линию ее действия. Точка пересечения равнодействующих линий 1-1 и 2-2 определяет центр тяжести самолета.
Приведенные аналог и прототип способа определения положения центра масс объектов в случае их использования для многоопорных, статически неопределимых упругих металлоконструкций обладают следующими недостатками:
- и аналог, и прототип предполагают использование дополнительных измерительных средств (весов, динамометров), опирающихся на основание, что невозможно для рассматриваемого класса объектов, при расположеннии в помещениях с недостаточной несущей способностью основания;
- недостаточные диапазоны и точности известных средств измерения, применяемых в прототипе, при малых углах наклона рассматриваемого класса объектов (диапазон допустимых угловых отклонений от занимаемого пространственного положения не превышает 3÷5 градусов);
- известные способы могут использоваться только вне режима штатной эксплуатации объектов.
Целью изобретения является создание способа определения положения центра масс для крупногабаритных объемных металлоконструкций, с необходимой точностью, для которых не существует средств прямого взвешивания. Они имеют протяженную форму, горизонтально ориентированны в пространстве, обладают неоднородным распределением жесткостных характеристик по длине, находятся в режиме эксплуатации в условиях ограниченного свободного окружающего пространства, что уменьшает допустимый угол отклонения объектов до диапазона в 3-5 градусов. Задача решается совокупностью расчетно-теоретических и экспериментальных работ.
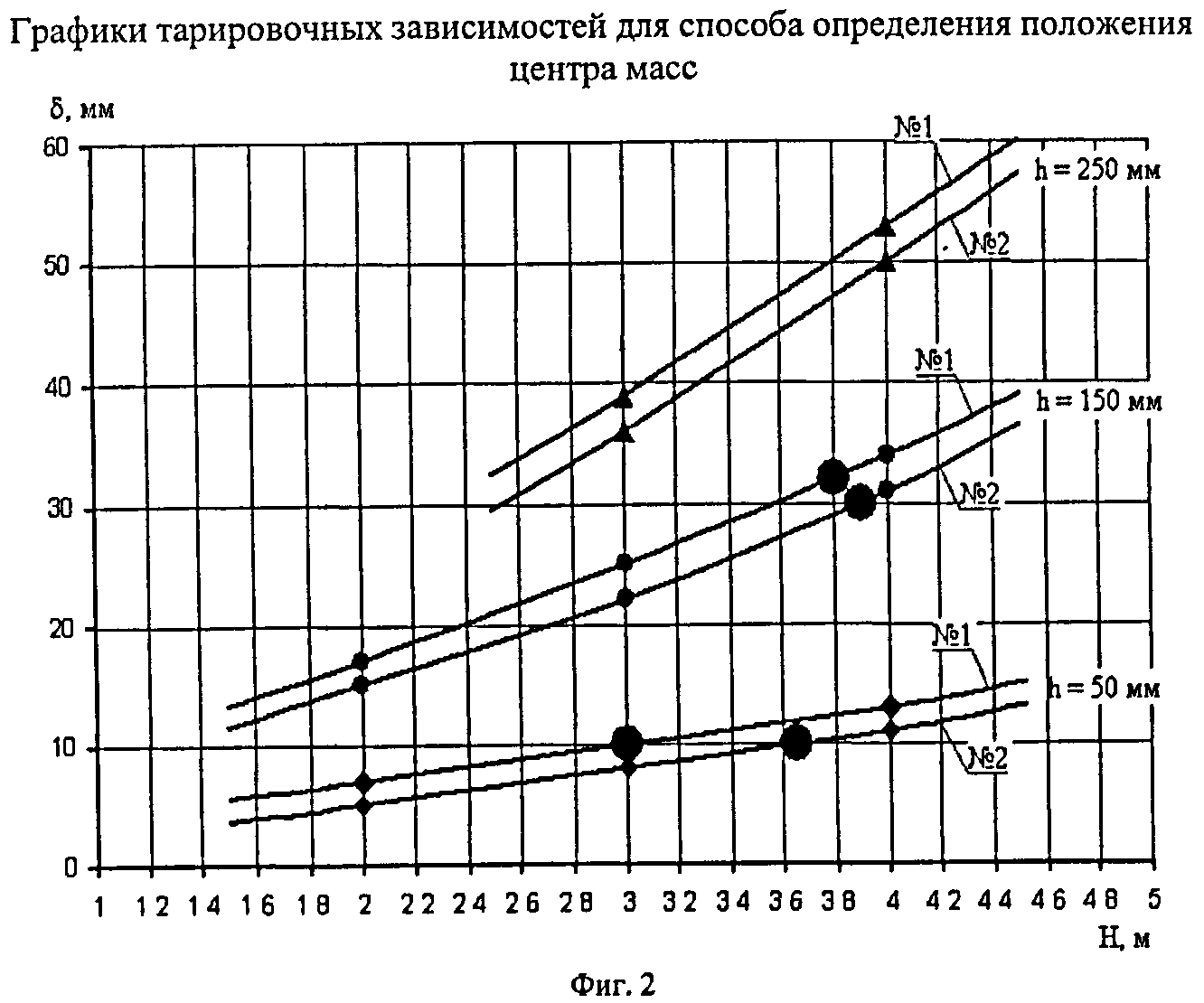
Предлагаемый способ основан на многократном измерении пространственного положения объекта (в нейтральном и отклоненных состояниях) и отличается тем, что в качестве величины, характеризующей высоту положения центра масс, принимают величину просадки противоположной стороны объекта. Затем моделируют отклоненное равновесное состояние объекта, установленного на системе амортизации, используя для этого расчетные модели объекта с разным по высоте положением центра масс, который задают в диапазоне 20-70% от геометрической высоты объекта. При моделировании создают режим подъема одной стороны объекта и определяют зависимость величин просадки противоположной стороны модели объекта от задаваемой высоты положения ЦМ в виде номограммы (например, фиг.2). Затем натурный объект склоняют путем подъема одной стороны на ряд фиксированных высот, обеспечивая при этом синхронность подъема и равновесное состояние на каждой высоте подъема, регистрируют высоту подъема и величину просадки противоположной стороны объекта и по измеренной величине просадки по номограмме находят высоту положения центра масс объекта.
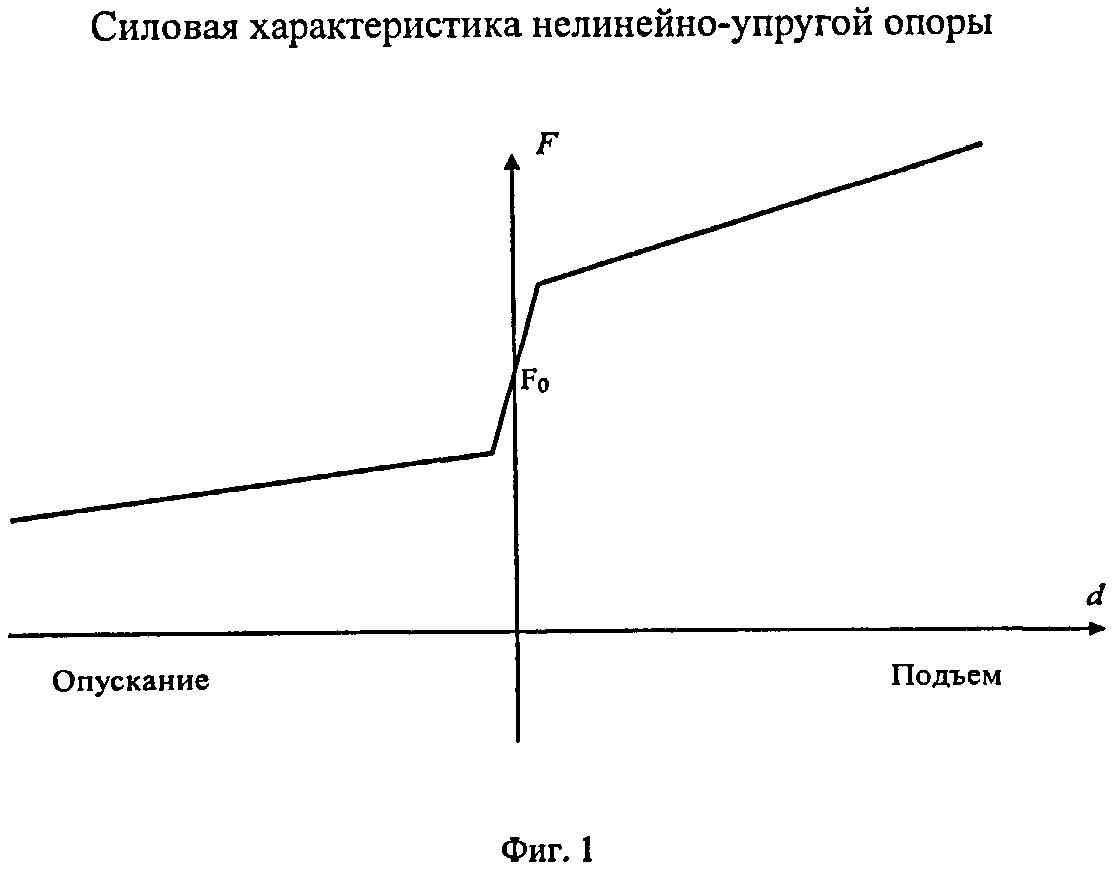
При отсутствии средств прямого взвешивания для определения реакция в опорах используются их нелинейные силовые характеристики. Зная силовые характеристики опор, принимая начальное пространственное положение объекта за горизонтальное, определяют суммарный вес объекта и координаты точки центра масс в горизонтальной плоскости. На фиг.1 приведен пример силовой характеристики нелинейно-упругой опоры в координатах деформация - сила (d-F). Для определения веса объекта (G) суммируют значения F0 во всех узлах подвески, а координаты точки центра масс в горизонтальной плоскости получают из уравнений механики.
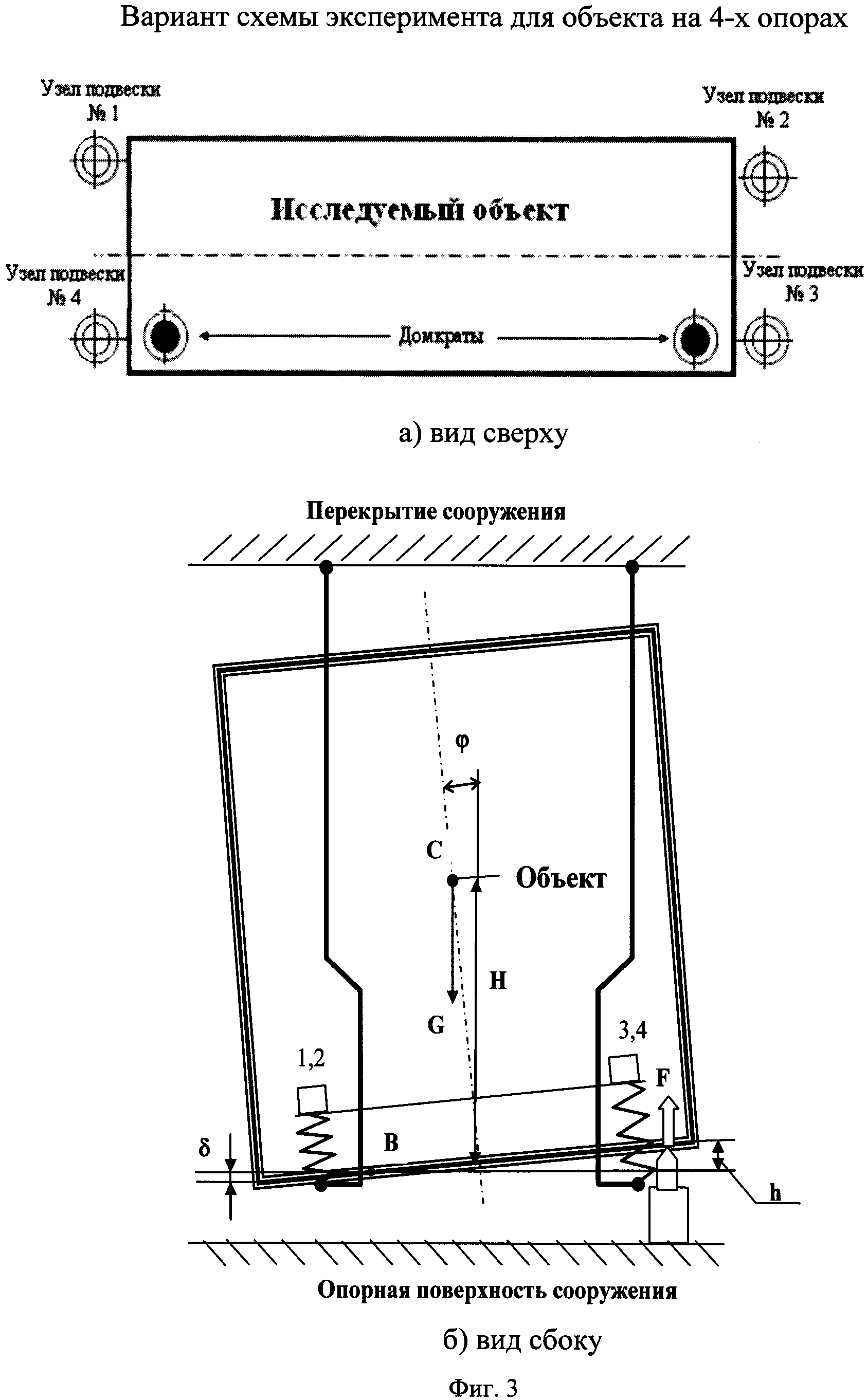
В качестве примера осуществления предлагаемого способа определения центра масс приведен вариант с 4-х опорным объектом, с габаритами в несколько метров и весом в несколько сотен тонн. Расчеты номограмм (фиг.2) выполняют для величин опускания (δ), как функции от высоты подъема противоположной стороны (h) при определенном заранее общем весе объекта (G). Значения высоты (H) центра масс объекта соответствуют 2 м, 3 м и 4 м. Значения высоты подъема стороны (h) для расчетов и последующих экспериментов задают произвольно, например: 50, 150 и 250 мм. На фиг.2 представлены номограммы для случая, когда сторона подъема проходит через узлы подвески №3 и №4, а расчеты выполняются для опускания в узлах подвески №1 и №2.
Экспериментальная часть предлагаемого способа определения центра масс состоит из следующих операций.
1. До начала подъема стороны регистрируют начальное пространственное положение объекта относительно ограждающих конструкций.
2. Вдоль длиной стороны объекта по узлам подвески №3 и №4 под днищем в районе силовых элементов устанавливают необходимое количество гидродомкратов (в районах расположения опор) для обеспечения необходимой суммарной грузоподъемности, синхронности подъема стороны, обеспечения щадящей нагрузки на строительное основание.
3. Синхронно поэтапно с помощью домкратов поднимают длинную сторону объекта на высоту 50, 150, 250 мм.
4. На каждом этапе подъема фиксируют величины подъема (сторона узлов №3 и №4) и опускания (сторона узлов №1 и №2).
5. По достижению предельного значения подъема выполняют пошаговое опускание объекта с фиксацией указанных в пункте 4 параметров.
6. Значение по высоте ЦМ определяют графический методом (фиг.2), в соответствии с которым для того или иного значения h на соответствующую тарировочную линию проецируют экспериментальное значение величины опускания δ (на фиг.2 представлены значками большего размера), координата полученной точки по оси Н соответствует истинной высоте расположения центра масс объекта.
Кривые обозначены номерами 1 и 2 (фиг.2), соответствуют номерам узлов подвески №1 и №2 на фиг.3.
Способ определения положения центра масс, по которому создают отклоняющий момент путем наклона объекта, обеспечивая равновесное состояние объекта, и регистрируют параметры равновесного состояния, по которым находят высоту положения центра масс,отличающийся тем, чтов качестве величины, характеризующей высоту положения центра масс, принимают величину просадки противоположной стороны объекта,затем моделируют наклоненное равновесное состояние объекта, установленного на системе амортизации, используя для этого расчетные модели объекта с разным по высоте положением центра масс, который задают в диапазоне 20-70% от геометрической высоты объекта, при моделировании создают режим подъема одной стороны объекта и определяют зависимость величин просадки противоположной стороны модели объекта от задаваемой высоты положения ЦМ в виде номограммы,затем натурный объект наклоняют путем подъема одной стороны на ряд фиксированных высот, обеспечивая при этом синхронность подъема и равновесное состояние на каждой высоте подъема, регистрируют высоту подъема и величину просадки противоположной стороны объекта и по измеренной величине просадки по номограмме находят высоту положения центра масс объекта.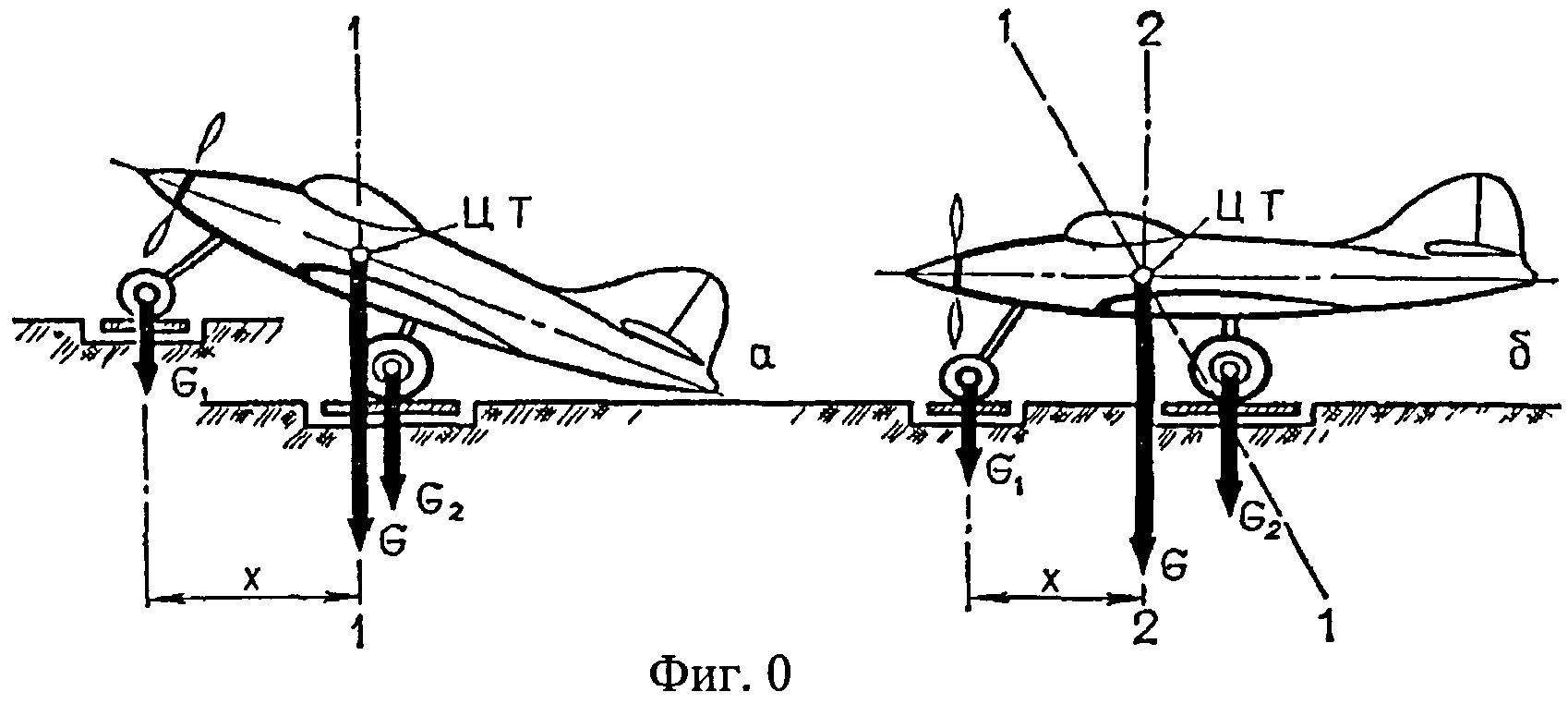
Устройство для охлаждения и очистки газообразного гелия
Транспортно-установочный агрегат стартового ракетного комплекса
Технический комплекс космодрома для подготовки к пуску на стартовом комплексе ракет-носителей
Технический комплекс космодрома для подготовки к пуску ракеты-носителя с космической головной частью, содержащей разгонный блок и космический аппарат
Пневмогидравлический амортизатор
Способ амортизации
Устройство тестирования электронного блока волоконно-оптического гироскопа
Испытательный стенд
Источник излучения с низким уровнем шумов интенсивности для волоконно-оптического гироскопа
Способ определения положения центра масс
Устройство для охлаждения и очистки газообразного гелия
Транспортно-установочный агрегат стартового ракетного комплекса
Технический комплекс космодрома для подготовки к пуску на стартовом комплексе ракет-носителей
Технический комплекс космодрома для подготовки к пуску ракеты-носителя с космической головной частью, содержащей разгонный блок и космический аппарат
Пневмогидравлический амортизатор
Способ амортизации
Устройство тестирования электронного блока волоконно-оптического гироскопа
Испытательный стенд
Источник излучения с низким уровнем шумов интенсивности для волоконно-оптического гироскопа
Способ определения положения центра масс

