Результат интеллектуальной деятельности: СПОСОБ ОКАЗАНИЯ ПОМОЩИ ПРИ ВОЖДЕНИИ ВОДИТЕЛЮ АВТОМОБИЛЯ В УСЛОВИЯХ, БЛИЗКИХ К ПРЕДЕЛУ УСТОЙЧИВОСТИ
Вид РИД
Изобретение
Настоящее изобретение относится к способу оказания помощи при вождении водителю автомобиля с целью повышения безопасности вождения в потенциально опасных дорожных условиях.
В последние годы электронные системы контроля устойчивости для автомобилей становятся все более популярными. Обычно такие системы отслеживают относящиеся к устойчивости транспортного средства числовые показатели, такие как погрешность в скорости поворота по курсу, т.е. расхождения между скоростями поворота по курсу на основании скорости транспортного средства и углом поворота рулевого колеса и наблюдаемой скоростью поворота по курсу, и соответственно торможение колес с одной стороны транспортного средства для того, чтобы способствовать движению на повороте, т.е. уменьшению расхождения между ожидаемыми и наблюдаемыми скоростями поворота по курсу.
Дилемма, присущая обычным электронным системам контроля устойчивости, заключается в том, что водители ожидают от них надежного активного включения в критических ситуациях с оказанием заметного влияния на движение транспортного средства, в то время как, с другой стороны, водителя может легко раздражать вмешательство электронной системы контроля устойчивости в ситуацию, которую он может - по меньшей мере, он так полагает - решить самостоятельно. Для того чтобы сделать электронную систему контроля устойчивости как можно менее назойливой, пороговое значение ее включения нужно установить на довольно высоком уровне, позволяя таким образом водителю попасть в затруднительную ситуацию, в которой оказываются необходимыми жесткие меры со стороны электронных систем контроля устойчивости и которую можно легко предотвратить за счет более низкого порогового значения включения. Целью настоящего изобретения является помощью в решении этой дилеммы.
Для этого согласно изобретению создан способ оказания помощи водителю автомобиля, который содержит этапы:
а) отслеживания, по меньшей мере, одного количественного показателя, выбранного из бокового скольжения транспортного средства, погрешности в скорости поворота по курсу, недостаточной поворачиваемости и количественных показателей, связанных с упомянутыми выше количественными показателями;
b) определения наличия опасности возникновения потери устойчивости транспортного средства в случае, если любой из отслеживаемых количественных показателей или количественных показателей, выведенных из одного или более отслеживаемых количественных показателей, превышает заданное первое пороговое значение;
с) в случае определения наличия опасности происходит подача предупредительного сигнала.
Учитывая предупредительный сигнал и предпочтительно снизив скорость, водитель может избежать многих ситуаций, которые могут привести к вмешательству электронной системы контроля устойчивости. Поэтому изобретение может быть использовано вместо обычной электронной системы контроля устойчивости; предпочтительно оно применяется в сочетании с электронной системой контроля устойчивости таким образом, чтобы улучшить ее действие.
Первое пороговое значение должно определяться скоростью автомобиля и углом поворота рулевого колеса.
Предупредительный сигнал может быть подан водителю в форме звукового, визуального или осязательного сигнала. Визуальный сигнал может быть, например, показан водителю на приборной панели на ветровом стекле, так чтобы он мог быть замечен водителем, фиксирующим свой взгляд на дороге перед ним. С другой стороны, осязательный сигнал может быть использован для приведения в действие исполнительного устройства, связанного с педалью управления транспортного средства или с рулевым колесом, так чтобы он надежно ощущался практически в любой ситуации вождения.
Предупредительный сигнал может также быть выдан как сигнал управления торможением на все тормоза транспортного средства.
Как показано выше, может оказаться полезным комбинировать способ, являющийся предметом настоящего изобретения, с работой обычной электронной системы контроля устойчивости, т.е. способ может дополнительно содержать операцию избирательного торможения колес транспортного средства в случае, если любой из указанных отслеживаемых количественных показателей превысит второе пороговое значение. Второе пороговое значение должно быть при этом задано таким образом, чтобы оказаться по существу превышенным только в случае, если превышено также первое пороговое значение, т.е. в большинстве случае торможение будет применено только в случае, если водитель получил предупреждение заранее и не прореагировал или в недостаточной степени прореагировал на предупреждение.
Первое и второе пороговые значения могут быть установлены для различных количественных показателей. Однако в случае, если они установлены для одного и того же количественного показателя, можно гарантировать, что предупредительный сигнал подается перед любым избирательным торможением.
Предпочтительно первое и второе пороговые значения установлены таким образом, что в большинстве ситуаций вождения водитель будет иметь достаточно времени на то, чтобы прореагировать на предупреждение до применения избирательного торможения. Однако это может быть только общим правилом при установке первого и второго пороговых значений, поскольку невозможно предсказать, как будет меняться со временем отслеживаемый количественный показатель в любом конкретном случае.
Операция отмены предупредительного сигнала предпочтительно осуществляется только в том случае, когда количественный показатель, который превысил первое пороговое значение, падает ниже третьего порогового значения, которое ниже первого, чтобы предотвратить выключение и повторное включение предупредительного сигнала в течение короткого времени.
Для того чтобы гарантировать подачу предупредительного сигнала в любой ситуации, когда он нужен, полезно нормализовать отслеживаемые количественные показатели относительно эталонного значения и вывести количественные показатели для сопоставления с упомянутым выше пороговым значением из, по меньшей мере, двух из этих нормализованных количественных показателей.
Количественным показателем для сопоставления предпочтительно может быть максимальная или взвешенная сумма нормализованных количественных показателей. Выбор одного или другого может зависеть от режима вождения транспортного средства.
В частности, максимум может быть выбран как количественный показатель для определения, превысил ли угол поворота рулевого колеса заданное пороговое значение, в то время как взвешенную сумму выбирают в случае, если угол поворота рулевого колеса ниже порогового значения. Таким образом, в случае большого угла поворота рулевого колеса предупреждение будет выдано только при условии, что нормализованные количественные показатели соответствуют критически высокому значению.
Если транспортное средство движется по прямой линии, боковые усилия, которые могут привести к потере водителем контроля над транспортным средством, практически отсутствуют. Для того чтобы предотвратить в этом случае выдачу ненужных предупреждений, уместно определить, движется ли транспортное средство по прямой линии или нет, и в случае, если окажется, что оно движется по прямой линии, задать, по меньшей мере, первое пороговое значение, более высокое, чем в случае, когда транспортное средство движется не по прямой линии.
Существуют кратковременные ситуации вождения, при которых водитель должен быстро и/или в чередующихся направлениях поворачивать рулевое колесо транспортного средства, что затрудняет надежную оценку недостаточной поворачиваемости транспортного средства. Для того чтобы учесть такие ситуации, желательно основывать принятие решения по этапу b) относительно недостаточной поворачиваемости только в случае, если величина и/или частота изменения знака производной по времени угла поворота рулевого колеса ниже заданного порогового значения.
Другие признаки и преимущества изобретения станут очевидными из последующего описания вариантов его реализации со ссылкой на прилагаемые чертежи, на которых:
фиг.1 - структурная схема устройства, предназначенного для реализации способа согласно настоящему изобретению;
фиг.2 - структурная схема детали устройства с фиг.1; и
фиг.3 - блок-схема процесса, выполняемого арбитражным блоком устройства с фиг.1.
Для правильного понимания последующего описания следует помнить, что наиболее вероятной является выполнение изобретения в форме должны образом запрограммированной микропроцессорной системы, хотя функциональные возможности, реализованные в такой микропроцессорной системе в виде программного обеспечения, могут также быть выполнены в форме схем с проводным монтажом. Поэтому описание отдельных признаков изобретения с помощью блоков схемы или с помощью операций способа определяется не технической необходимостью, но просто тем фактом, что в случае, если процессы выполняются одновременно или взаимная связь которых по времени не имеет значения для изобретения, описание в форме структурной схемы оказывается легче для понимания, чем в форме блок-схемы, в то время как описание операций способа с помощью блок-схемы является более ясным, если операции могут быть непосредственно сгруппированы во временном порядке.
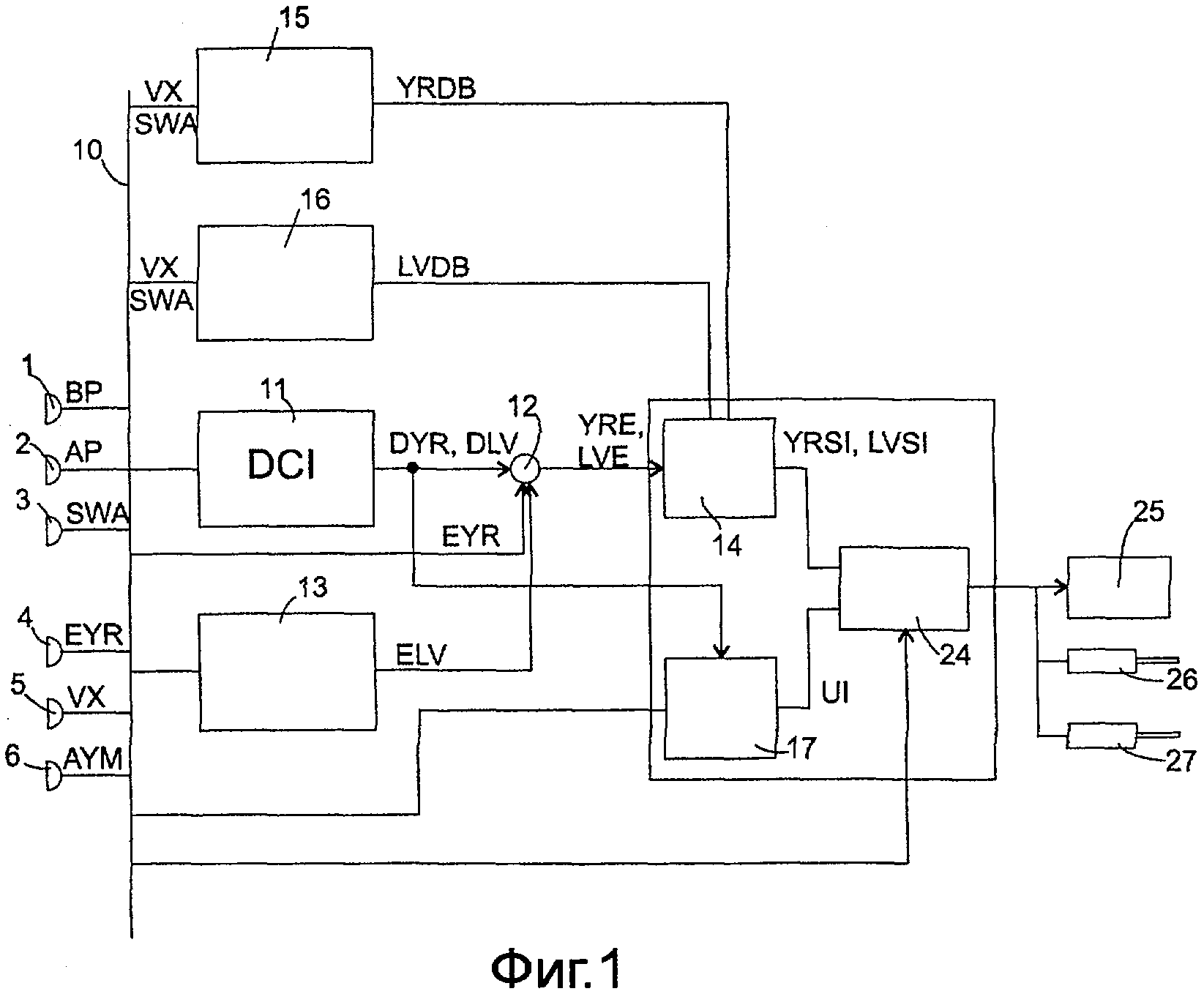
На фиг.1 показана структурная схема устройства, предназначенного для реализации способа согласно настоящему изобретению. Устройство содержит множество датчиков, которые все обычно помещаются на автомобиле, такие как:
датчик 1 тормоза, выдающий сигнал BP педали тормоза, указывающий, нажата ли педаль тормоза или нет, и, в конечном счете, количественный показатель, указывающий степень, в которой она нажата;
датчик 2 педали газа, выдающий сигнал АР, представляющий положение педали газа,
датчик 3 угла поворота рулевого колеса, выдающий сигнал SWA угла поворота рулевого колеса, представляющий степень, в какой рулевое колесо транспортного средства повернуто относительно эталонной ориентации;
датчик 4 скорости поворота по курсу, который выдает сигнал EYR эффективной скорости поворота,
датчик 5 скорости, выдающий сигнал продольной скорости VX транспортного средства VX, и другие.
Все эти датчики соединяются с общей шиной 10 данных.
Все компоненты, показанные с правой стороны шины данных на фиг.1, могут быть компонентами одной микропроцессорной системы или могут быть представлены отдельными аппаратными компонентами, в зависимости от необходимости. Один из этих компонентов, обозначенный как интерпретатор команд водителя DCI 11, принимает от шины 10 данных сигналы SWA, VX и определяет на их основании нужную скорость DYR поворота по курсу и нужную поперечную составляющую скорости DLV. DCI 11 может содержать арифметическую схему, предназначенную для расчета нужной скорости DYR поворота и нужной поперечной составляющей скорости DLV на основе кинематической модели автомобиля и измеренных значений продольной скорости VX и угла SWA поворота рулевого колеса, или он может содержать справочные таблицы, хранящие экспериментально определенные скорости поворота и поперечные составляющие скорости для различных сочетаний скорости транспортного средства и угла поворота рулевого колеса.
Ступень 12 вычитания выдает погрешность в скорости YRE поворота по курсу, которая является разностью между значением нужной скорости DYR поворота от DCI 11 и значением эффективной скорости EYR поворота от датчика 4 скорости поворота. Ступень вычитания 12 рассчитывает после этого погрешность производной поперечной составляющей скорости LVE, которая представляет собой разность между значением нужной производной поперечной составляющей скорости DLV от DCI 11 и эффективной производной поперечной составляющей скорости ELV, рассчитанной в блоке 13 по формуле:
|
где AYM является поперечной составляющей ускорения, измеренной непосредственно датчиком 6 ускорения. Короче, эффективные производные поперечной составляющей скорости ELV могут рассматриваться как разность между общей поперечной составляющей ускорения, которой подвергается транспортное средство, и центробежным ускорением, т.е. она относится к изменению угла бокового скольжения, угла между продольной ориентацией транспортного средства и направлением смещения его центра тяжести.
Ступень 12 вычитания направляет сигнал YRE погрешности скорости поворота по курсу и сигнал LVE погрешности производной поперечной составляющей скорости в секцию 14 расчета индекса устойчивости. Секция 14 расчета соединяется со справочными таблицами 15, 16. В справочной таблице 15 хранятся значения YRDB зоны нечувствительности скорости поворота по курсу как функция продольной скорости VX и угла поворота рулевого колеса SWA, в таблице 16 хранятся значения LVDB зоны нечувствительности производной поперечной составляющей скорости как функции VX и SWA. Эти значения зоны нечувствительности представляют заданное значение в процентах скорости поворота по курсу или производной поперечной составляющей скорости, при превышении которого при данной скорости транспортного средства и повороте рулевого колеса теряется контроль над транспортным средством. Если устройство, являющееся предметом настоящего изобретения, используется в сочетании с электронным контролем устойчивости (системой ESC), система ESC может использовать связанные зоны нечувствительности скорости поворота по курсу и производной поперечной составляющей скорости для того, чтобы определить, следует ли вмешиваться или нет, и которые являются прямо пропорциональными зонам нечувствительности справочных таблиц 15, 16. В случае если, например, зоны нечувствительности системы ESC находятся на уровне 70% значения, при котором теряется управление транспортным средством при данной скорости транспортного средства и угле поворота рулевого колеса, зоны нечувствительности из таблиц 15, 16 могут находиться на уровне 50% от такого значения, гарантируя, как будет более ясно из дальнейшего, что устройство согласно изобретению выдаст предупредительный сигнал перед любым вмешательством ESC.
На основании зон YRDB, LVDB нечувствительности в таблицах 15, 16 и сигналов YRE, LVE погрешности от ступени 12 вычитания секция 14 расчета индекса устойчивости определяет индексы YRSI, LVSI стабильности скорости поворота по курсу и производной поперечной составляющей скорости следующим образом.
|
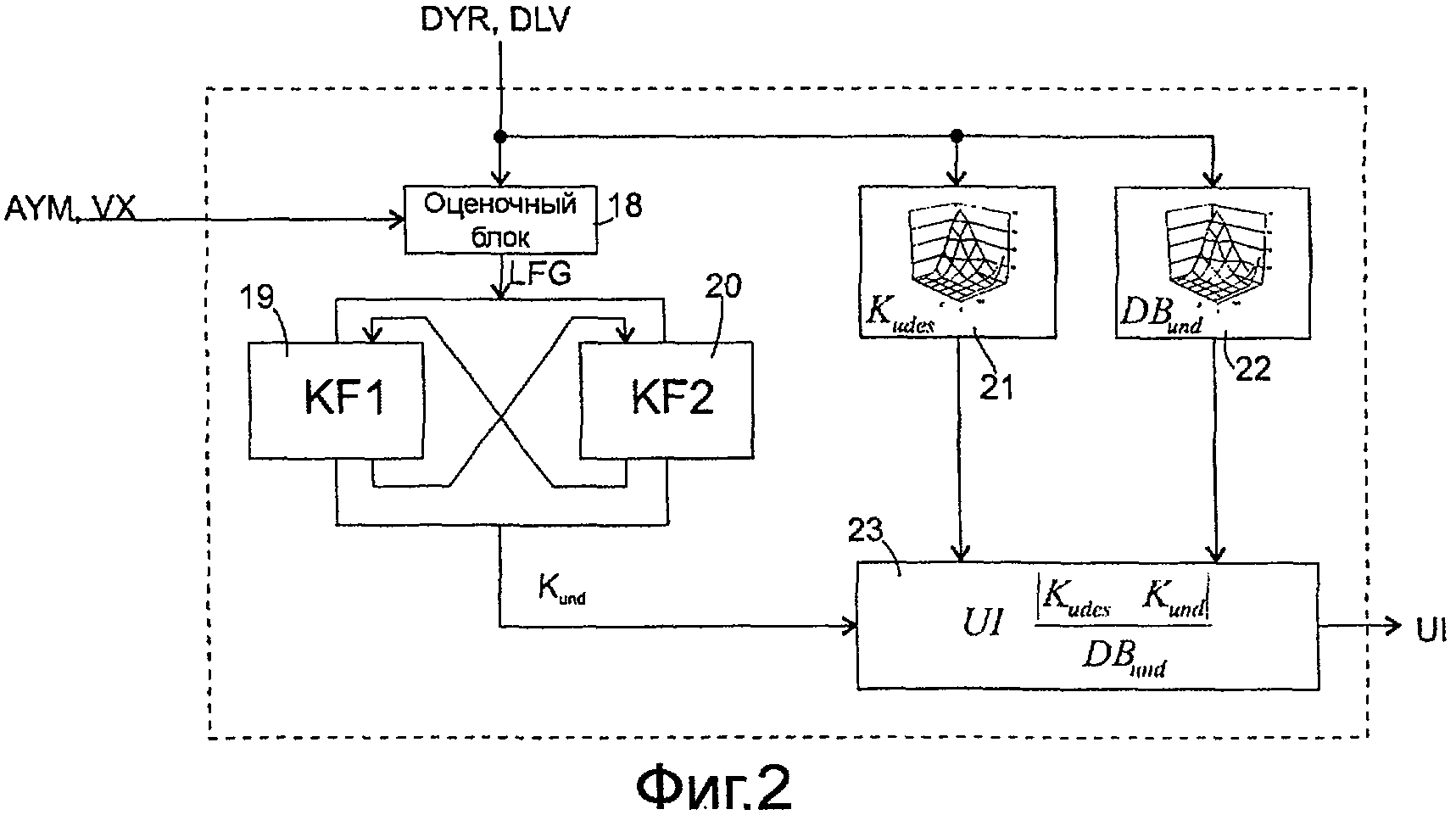
Структура и действие секции 17 расчета индекса недостаточной поворачиваемости детально объясняются со ссылкой на фиг.2. Для оценки недостаточной поворачиваемости транспортного средства важно знать, происходит ли движение транспортного средства в линейном режиме, когда угол бокового скольжения транспортного средства приблизительно прямо пропорционален величине боковых усилий, воздействию которых оно подвергается, или в нелинейном режиме, при котором угол бокового скольжения возрастает гораздо быстрее с боковыми усилиями, чем в случае линейного режима. Для определения режима транспортного средства предусмотрен оценочный блок 18. Оценочный блок 18 принимает от DCI 11 значение нужной скорости DYR поворота и нужной производной DLV поперечной составляющей скорости. От шины 10 он получает значение AYM поперечного ускорения и значение VX продольной скорости. На основании этих количественных показателе оценочный блок 18 проверяет три условия, а именно:
|
Первое условие (формула 3) выполняется всякий раз, когда измеренное значение AYM поперечного ускорения близко согласуется с тем, которого можно было бы ожидать на основании нужных скоростей DYR поворота по курсу и производных DLV поперечной составляющей скорости при имеющей место скорости VX транспортного средства. Это условие необязательно выполняется только в линейном режиме, но если оно выполняется, транспортное средство, вероятно, действует в линейном режиме.
Исходя из этого первого условия (формула 3) уже ясно, что во втором условии (формула 4) выражение в скобках должно близко согласовываться с поперечным ускорением AYM. Если согласование было точным, левая сторона неравенства должна всегда быть положительной, и формула (4) всегда должна выполняться. Согласование не является точным в нелинейном режиме; здесь возможен сдвиг фазы между AYM и выражением в скобках, так чтобы левая сторона равенства стала более отрицательной, чем -ASQ_THR2, которая является ничтожным отрицательным порогом.
Согласно третьему условию (формула 5) погрешность скорости поворота по курсу |DYR - EYR| не должна превышать заданного порогового значения YR_Max. В случае если все эти три условия выполняются постоянно в течение заданного интервала времени, или же они выполняются постоянно с момента пуска транспортного средства, линейный флаг LFG, выданный оценочным блоком 18, принимает значение 1; в ином случае это ноль.
К трем указанным условиям по формулам (3)-(5) может быть добавлено четвертое условие:
|
где YR_Min является небольшим положительным числом. Это условие предотвращает неоправданно частое переключение между LFG = 0 и LFG = 1, поскольку в случае, если транспортное средство движется прямо, формула (5') не выполняется и LFG не может меняться от 0 до 1.
Линейный флаг LFG управляет работой двух фильтров Кальмана 19, 20 с целью оценки недостаточной поворачиваемости транспортного средства в линейном и нелинейном режимах соответственно.
В линейном режиме, с линейным флагом LFG = 1, постоянная недостаточная поворачиваемость может быть рассчитана согласно

где L обозначает колесную базу и R - радиус поворота транспортного средства.
В то время, когда линейный флаг LFG = 1, фильтр Кальмана 20 не действует, и формула (6) преобразуется в следующие формулы для фильтра Кальмана 19:
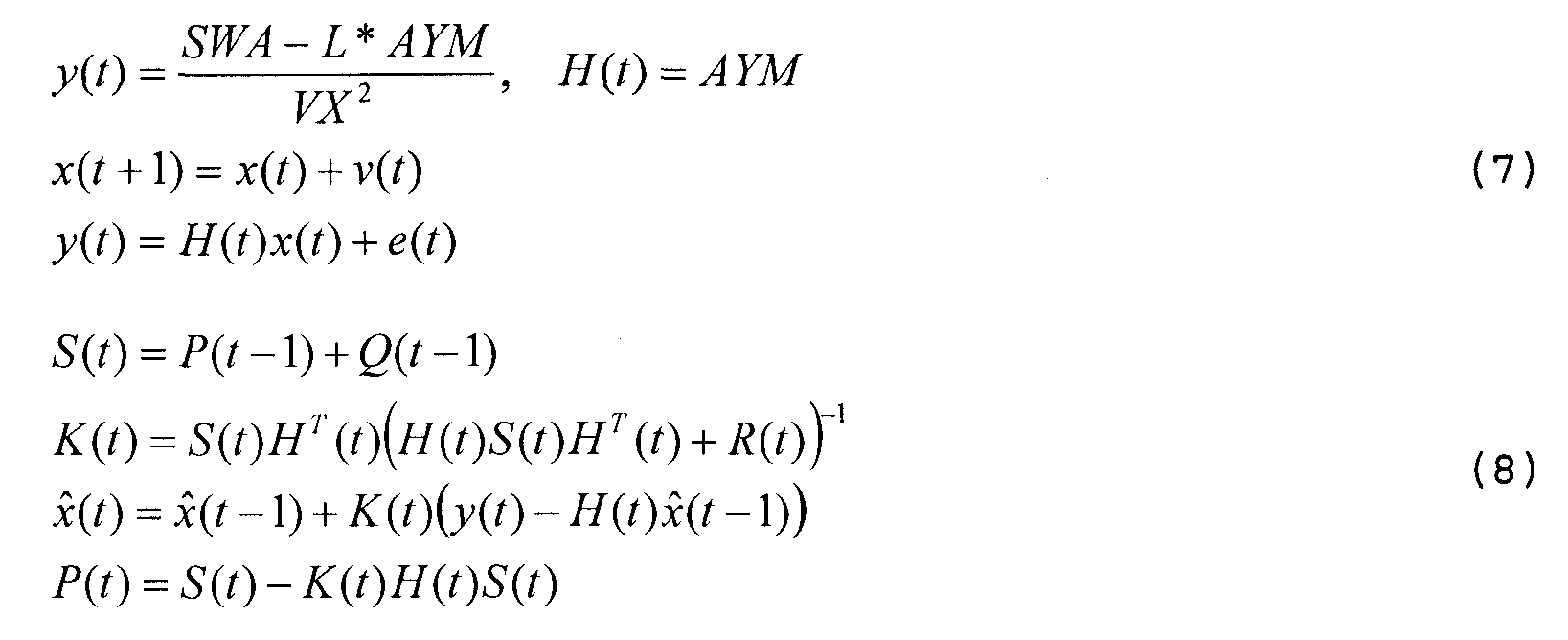
в нелинейном режиме, причем недостаточная поворачиваемость может быть рассчитана согласно

где αf,αr являются углами скольжения передней и задней покрышки. Когда оценочный блок определяет, что транспортное средство действует в нелинейном режиме, линейный флаг LFG становится равным нулю, в то время как фильтр 19 останавливается, а фильтр 20 начинает работать, будучи установлен в исходное положение, по меньшей мере, наиболее последним значением недостаточной поворачиваемости от фильтра 19 и, в конечном счете, одним или больше значений его ковариации. Фильтр 20 подобен фильтру 19 за исключением количественных показателей, используемых как y(t) и H(t) в формуле (7):

Аналогичным образом при изменении ERF вновь до 1 фильтр 19 снова становится действующим и устанавливается в исходное положение с номинальным значением недостаточной поворачиваемости на основании поперечной жесткости передней и задней шин и распределения веса транспортного средства спереди и сзади при начальных значениях ковариации.
В принципе, два фильтра 19, 20 могут рассматриваться как единый фильтр Кальмана, который меняет y(t) и H(t) согласно значению LFG.
По аналогии с описанным выше для индексов YRSI, LVSI устойчивости в справочных таблицах 21, 22 приведены значения нужной недостаточной поворачиваемости Кudes и зоны нечувствительности недостаточной поворачиваемости DBund. Как и в случае скорости поворота по курсу и производной поперечной составляющей скорости, нужные значения недостаточной поворачиваемости можно определить заранее эмпирически путем измерения недостаточной поворачиваемости. С другой стороны, они могут быть рассчитаны заранее или в режиме реального времени, например с использованием следующей формулы:

где Cf, Cr являются поперечной жесткостью передней и задней шин, а Wf, Wr являются частью веса транспортного средства, которую несут на себе передняя и задняя ось соответственно. Поскольку Kudes может иметь непрактично высокие значения согласно приведенной выше формуле (11) при больших скоростях и углах поворота рулевого колеса, желательно очертить верхний предел нужной недостаточной поворачиваемости Kudes следующим образом:

где верхнее предельное значение Kund_max может быть задано равным, например, 10˚/g или 5˚/g, причем g обозначает ускорение силы тяжести.
По аналогии с YRDB и LVDB зона нечувствительности недостаточной поворачиваемости UDB дает значения недостаточной поворачиваемости, которые можно рассматривать как безопасные при данном угле SWA поворота рулевого колеса и скорости VX транспортного средства. Арифметический блок 23 рассчитывает индекс UI недостаточной поворачиваемости на основании эффективной недостаточной поворачиваемости транспортного средства Kund_linear или Kund_nl, определенной фильтром 19 или 20, нужной недостаточной поворачиваемости Kudes из таблицы 21 и зоны нечувствительности недостаточной поворачиваемости DBund из таблицы 22:

Как показано также на фиг.1, на блок 24 арбитратора подаются три индекса URSI, LVSI и UI. Хотя они имеют разное происхождение, три индекса совместимы в том отношении, что они являются безразмерными числами и что значение, превышающее 1, указывает на критическую ситуацию при вождении.
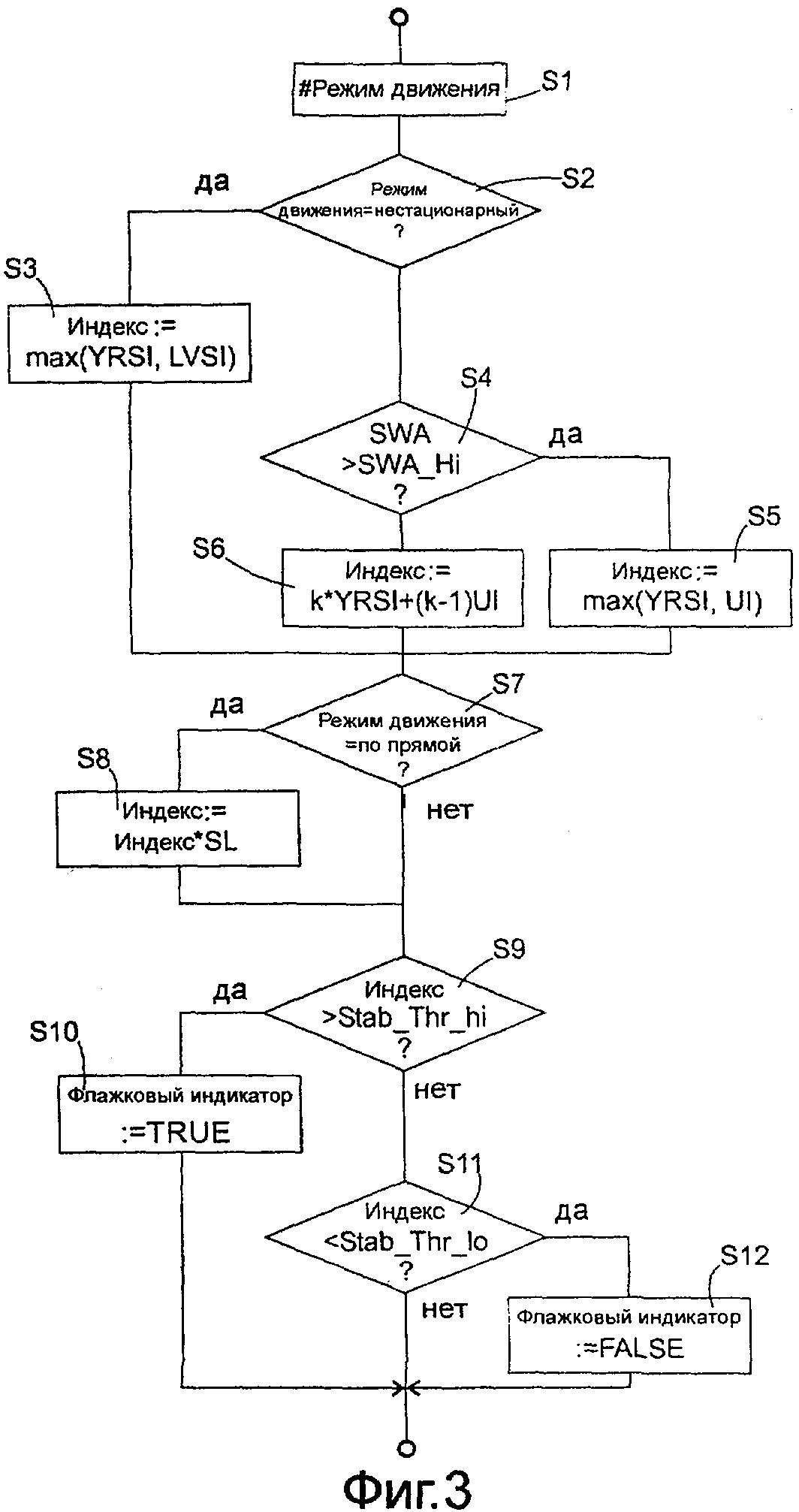
Работа блока арбитратора 24 объясняется со ссылкой на блок-схему на фиг.3. Способ согласно этой блок-схеме регулярно повторяется в блоке арбитратора 24. Первой операцией S1 согласно этому способу является определение режима вождения транспортного средства. Способы оценки режима вождения транспортного средства, такого как вождение по прямой, движение на повороте, торможение, ускорение и т.п., известны специалистам в данной области из различных предыдущих заявок того же самого заявителя, так что здесь приведено только краткое описание. Для целей настоящего изобретения достаточно установить различие между нестационарным режимом, т.е. режимом, при котором угол SWA поворота рулевого колеса часто изменяет свой знак или при котором его производная по времени превышает заданное пороговое значение, режимом вождения по прямой, при котором и угол SWA поворота рулевого колеса, и его производная по времени близки в течение определенного времени к нулевому значению, и любым другим режимом вождения.
В нестационарном режиме направление движения транспортного средства меняется так быстро, что на недостаточную поворачиваемость, рассчитанную арифметическим блоком 23, нельзя надеяться. Поэтому в случае, если в ходе операции S2 будет обнаружено, что режим движения является нестационарным режимом, решение о том, находится ли транспортное средство в критической ситуации или нет, может основываться только на скорости поворота и производной поперечной составляющей скорости YRSI, LVSI, а общий индекс устойчивости устанавливают в ходе операции S3 равным большему из YRSI и LVSI.
Если транспортное средство не находится в нестационарном режиме, в ходе операции S4 производят сопоставление обнаруженного угла SWA поворота рулевого колеса с заданным верхним пороговым значением SWA_Hi. Если это пороговое значение превышено, существует серьезная опасность возникновения неустойчивости транспортного средства, и система должна обладать свободой для выдачи предупреждения. В этом случае общий индекс устойчивости устанавливают в ходе операции S5 равным большему из YRSI и UI.
В других обстоятельствах в ходе операции S6 вычисляют взвешенную сумму k*YRSI + (k-1)UI индекса YRSI устойчивости скорости поворота и индекса UI недостаточной поворачиваемости. Весовой коэффициент k настраивается на значение между 0 и 1 конструктором транспортного средства. Весовой коэффициент k может зависеть от скорости VX транспортного средства и предпочтительно уменьшается со скоростью транспортного средства, придавая растущее значение недостаточной поворачиваемости при больших скоростях.
После любой из операций S3, S5, S6 способ переходит к операции S7, при которой определяют, действует ли транспортное средство в режиме вождения по прямой. Если это так, то в ходе операции S8 производится умножение общего индекса SL устойчивости, определенного в ходе любой из операций S3, S5, S6, на положительный множитель, который меньше единицы, что отражает тот факт, что транспортное средство в меньшей мере подвержено потере управления в случае вождения по более длинной прямой линии. Например, SL может быть равен 0,1. В ином случае выполнение способа переходит непосредственно от операции S7 к операции S9.
В ходе операции S9 общий индекс устойчивости сравнивают с верхним пороговым значением, например, 0,8. Если он превышает это верхнее пороговое значение, в ходе операции S10 флажковый индикатор сигнализации устанавливается на TRUE (верно). Поскольку приведенные в таблицах 15, 16 зоны нечувствительности производной поперечной составляющей скорости и скорости поворота заданы ниже таких же показателей в системе ESC, флажковый индикатор должен установиться на TRUE перед любым вмешательством системы ESC.
Флажковый индикатор может применяться различным образом. Согласно первому варианту реализации, в транспортном средстве может быть предусмотрено отображение показателей на лобовом стекле, которое приводится в действие после установки флажкового индикатора на TRUE и которое отображает предложение водителю снизить скорость. Согласно другому варианту реализации, приводится в действие вибратор 26, передающий вибрацию на педаль управления транспортного средства или на его рулевое колесо.
В случае педали газа флажковый индикатор может также использоваться для срабатывания вибратора 27, который толкает педаль газа в положение покоя, противодействуя давлению, которое развивает нога водителя. Таким образом можно очень эффективно заставить водителя снизить скорость без прямой отмены его команд. Если он развивает слишком большую скорость из-за недостатка внимания, то возможно, что исполнительный механизм отожмет его ногу назад и уменьшит тяговое усилие двигателя, в то время как в аварийной ситуации, когда водитель отжимает педаль газа до упора с целью уйти от опасности, исполнительный механизм не сможет преодолеть давление ноги водителя, и транспортное средство послушно выполняет команды водителя вплоть до момента, когда вмешательство ESC становится необходимым.
Если в ходе операции S9 обнаружится, что индекс устойчивости не превышает верхнее пороговое значение, индекс в ходе операции S11 сравнивают с нижним пороговым значением. Это нижнее пороговое значение может равняться, например, 0,2. В случае если индекс ниже этого нижнего порогового значения, флажковый индикатор в ходе операции S12 устанавливается на FALSE (неверно); если нет, то флажковый индикатор остается в прежнем положении до повторения процедуры.
Регулирующее по высоте устройство для погрузочного основания автомобиля
Система ограничения удара автомобиля
Конструктивный элемент для конструкции типа оболочки
Направляющий блок для регулируемого по высоте погрузочного основания и автомобиль с таким направляющим блоком и регулируемым по высоте погрузочным основанием
Система сиденья с двумя сиденьями транспортного средства в одном ряду сидений
Уплотнительное кольцо и способ его изготовления
Опора контейнера в салоне автомобиля
Задний багажник для автомобиля
Рамная конструкция для автомобиля
Выхлопное устройство транспортного средства
Регулирующее по высоте устройство для погрузочного основания автомобиля
Система ограничения удара автомобиля
Конструктивный элемент для конструкции типа оболочки
Автомобиль с задней дверью
Направляющий блок для регулируемого по высоте погрузочного основания и автомобиль с таким направляющим блоком и регулируемым по высоте погрузочным основанием
Система сиденья с двумя сиденьями транспортного средства в одном ряду сидений
Уплотнительное кольцо и способ его изготовления
Опора контейнера в салоне автомобиля
Задний багажник для автомобиля
Рамная конструкция для автомобиля

