СПОСОБ ОЦЕНКИ ВЫСОТЫ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ
Вид РИД
Изобретение
Изобретение относится к радиолокации, в частности к бортовым радиолокационным средствам (БРЛС) навигации летательных аппаратов (ЛА), обеспечивающим наведение на наземные цели или посадку ЛА по радиолокационным изображениям (РЛИ) земной поверхности (района заданной наземной цели или опорных участков местности), получаемым с использованием синтезирования антенного раскрыва (CAP).
Знание высоты полета ЛА относительно наблюдаемых участков земной поверхности позволяет определить угломестное положение наблюдаемых наземных объектов и с использованием этой информации, а также информации, содержащейся в траекторном сигнале БРЛС с CAP, уточнить параметры траектории полета ЛА.
Известен радиотехнический способ измерения высоты полета Н летательного аппарата (ЛА) [1], стр.10-17, заключающийся в том, что на ЛА устанавливают радиовысотомер (РВ), измеряют с его помощью время t прохождения радиоволн от летательного аппарата до земли и обратно, вычисляют высоту полета  , где с - скорость света. Используются радиовысотомеры с частотной [2] или импульсной [3] модуляцией излучаемого сигнала.
, где с - скорость света. Используются радиовысотомеры с частотной [2] или импульсной [3] модуляцией излучаемого сигнала.
Такой способ измерения высоты полета обладает следующими основными недостатками.
1. Не обеспечивается возможность прямого измерения высоты полета ЛА относительно заданных наземных объектов (участков местности), не находящихся непосредственно под ЛА.
2. При маневрировании ЛА, при наличии крена и тангажа летательного аппарата, измеряется не высота полета, а наклонная дальность до облучаемого радиовысотомером участка земной поверхности.
3. Измеренные значения высоты полета имеют большой разброс при полете над пересеченной местностью.
Наиболее близким по технической сущности аналогом (прототипом) предлагаемого способа является способ, описанный в [4], в соответствии с которым высота полета ЛА относительно заданного подлежащего радиолокационному наблюдению участка земной поверхности определяется с использованием моноимпульсной диаграммы направленности антенны бортовой РЛС. При этом антенна БРЛС направляется на заданный участок местности.
С использованием CAP бортовой моноимпульсной РЛС одновременно формируются радиолокационные изображения наблюдаемого участка местности при обработке радиолокационных сигналов, поступающих:
по суммарному каналу приемника бортовой моноимпульсной РЛС;
по разностному угломестному каналу бортовой моноимпульсной РЛС.
На РЛИ, сформированном по суммарному сигналу, выделяется некоторый радиолокационно-яркий элемент изображения.
С использованием соотношения сигналов, полученных для наблюдаемого яркого элемента по разностному наклонному и суммарному каналам БРЛС, а также данных об угле наклона антенны, определяется угол места линии визирования этого элемента. На основе этой оценки, а также данных о наклонной дальности до наблюдаемого яркого элемента местности, используемых при формировании РЛИ, осуществляется расчет текущей высоты полета ЛА относительно наблюдаемого участка местности.
Недостатками данного способа оценки высоты полета ЛА относительно наблюдаемого участка местности является относительно низкая точность получаемых оценок, определяющаяся:
несоответствием направлений электрической и строительной осей моноимпульсной антенны БРЛС в угломестной плоскости;
наличием ошибок в обеспечении требуемого соответствия направлений строительных осей ЛА и моноимпульсной антенны БРЛС в угломестной плоскости;
наличием ошибок в определении угла тангажа ЛА при формировании РЛИ;
отсутствием учета высоты наблюдаемых элементов радиолокационно-яркого объекта относительно наблюдаемого участка местности;
отсутствием учета влияния рельефа наблюдаемого участка местности.
Предлагаемый способ оценки высоты полета ЛА относительно заданного участка местности отличается от прототипа тем, что указанную оценку получают путем:
формирования (в полете на борту ЛА с использованием БРЛС с CAP) совокупности текущих радиолокационных изображений заданного участка местности в земной системе координат, причем каждое из указанных РЛИ формируется для априорно задаваемых конкретных расчетных значений высоты полета;
сопоставления каждого из сформированных текущих радиолокационных изображений с заранее подготовленным эталонным радиолокационным изображением заданного участка местности с оценкой значения максимума функции, отражающей взаимную корреляцию этих изображений,
принятия в качестве оценки высоты полета ЛА того значения априорно заданного расчетного значения высоты полета, при котором максимум функции, отражающей взаимную корреляцию текущего и эталонного радиолокационных изображений, имеет наибольшую величину.
Решение задачи оценки высоты полета ЛА в соответствии с предлагаемым способом рассмотрим на примере формирования с использованием CAP радиолокационного изображения в земной системе координат (ЗСК), начало которой совмещается с некоторой опорной точкой (точкой прицеливания) на подлежащем наблюдению участке местности (фиг.1).
В рассматриваемой СК ось OY направлена вверх по местной вертикали, проходящей через точку прицеливания (ТП). Ось ОХ перпендикулярна оси OY. Ось OZ дополняет систему координат до правой.
Направление оси ОХ определяется условиями задачи, в процессе решения которой осуществляется навигация ЛА. В том числе, ось ОХ может быть направлена на север или принадлежать азимутальной плоскости, совпадающей с направлением от точки старта ЛА до конечной точки его приведения или совпадать с планируемым азимутальным направлением визирования участка местности.
Направление оси ОХ относительно наблюдаемого участка местности (НУМ) определяет ориентацию в ЗСК формируемого в полете ЛА (текущего) радиолокационного изображения (РЛИ).
С учетом важности в рассматриваемой задаче относительности взаимного перемещения ЛА и НУМ, в общем случае совмещение точки начала ЗСК с какой-либо точкой НУМ является необязательным. В том числе, начало ЗСК может быть совмещено и с летательным аппаратом.
В рассматриваемой ЗСК координаты каждого элемента наблюдаемого участка местности (элементарного отражателя радиолокационных сигналов), соответствующего i-му элементу формируемого в ЗСК текущего кадра РЛИ, определяются следующими соотношениями:


где
хла, zла - оценки текущих плановых координат летательного аппарата (фазового центра антенны БРЛС ЛА) в ЗСК, получаемые на основе данных бортового навигационного комплекса (НК) ЛА (например, инерциальной навигационной системы) на момент формирования текущего радиолокационного изображения;
 - оценка горизонтальной дальности от ЛА до элемента наблюдаемого участка местности, соответствующего i-му элементу текущего РЛИ, формируемого БРЛС с использованием CAP;
- оценка горизонтальной дальности от ЛА до элемента наблюдаемого участка местности, соответствующего i-му элементу текущего РЛИ, формируемого БРЛС с использованием CAP;
βi - оценка азимутального угла визирования элемента НУМ, соответствующего i-му элементу текущего РЛИ, формируемого БРЛС с CAP, относительно азимутального направления путевой скорости ЛА;
φi=βi+Ψ - оценка угла между осью ОХ и азимутальным направлением визирования элемента НУМ, соответствующего i-му элементу формируемого текущего РЛИ;
Ψ - оценка угла пути ЛА.
Если элемент формируемого РЛИ соответствует точке прицеливания, то получаемые в ЗСК с использованием (1) и (2) значения ее координат характеризуют оценки плановых поправок к траектории ЛА.
Для величин  , βi, оцениваемых на основе первичных текущих радиолокационных изображений земной поверхности, формируемых БРЛС с CAP в полете в системе координат «доплеровская частота - наклонная дальность», справедливо
, βi, оцениваемых на основе первичных текущих радиолокационных изображений земной поверхности, формируемых БРЛС с CAP в полете в системе координат «доплеровская частота - наклонная дальность», справедливо

где
Ri - оценка наклонной дальности от ЛА до элемента НУМ, соответствующего i-му элементу формируемого текущего РЛИ;
 - оценка угла места элемента НУМ, соответствующего i-му элементу формируемого текущего РЛИ;
- оценка угла места элемента НУМ, соответствующего i-му элементу формируемого текущего РЛИ;
hi=yла - yi - оценка высоты полета ЛА относительно элемента НУМ, соответствующего i-му элементу формируемого текущего РЛИ;
yла - оценка высоты полета ЛА в ЗСК;
yi - высота элемента НУМ, соответствующего i-му элементу формируемого текущего РЛИ, относительно точки прицеливания;
 - оценка скорости сближения ЛА с элементом НУМ, соответствующим i-му элементу формируемого текущего РЛИ;
- оценка скорости сближения ЛА с элементом НУМ, соответствующим i-му элементу формируемого текущего РЛИ;
 - доплеровская частота, соответствующая 1-му элементу формируемого РЛИ;
- доплеровская частота, соответствующая 1-му элементу формируемого РЛИ;
 - оценка путевой (горизонтальной составляющей) скорости полета ЛА;
- оценка путевой (горизонтальной составляющей) скорости полета ЛА;
Vx - оценка составляющей скорости полета ЛА по оси X;
VZ - оценка составляющей скорости полета ЛА по оси Z;
λ - длина волны зондирующих сигналов БРЛС.
Применительно к оцениваемым плановым координатам элементов НУМ в рассматриваемой ЗСК с учетом того, что


из (3) и (4) получим


где

Приведенные выражения отражают зависимость оценок плановых координат элемента НУМ, соответствующего i-му элементу формируемого текущего РЛИ от значений траекторных параметров (хла, zла, yла, Vx, Vz, Vy) характеризующих условия полета ЛА, в которых осуществляется формирование текущего радиолокационного изображения земной поверхности.
Как известно [5], значения ошибок формирования параметра р=f(q1,q2, …, qn) как функции измеряемых координат q1, q2, …, qn при малых отклонениях Δq1, Δq2, …, Δqn определяются с использованием формулы полного дифференциала

где  - оценка координаты qi.
- оценка координаты qi.
Учитывая, что оценки значений составляющих скорости полета ЛА могут быть получены с весьма высокой точностью [6], далее ограничимся рассмотрением влияния на формирование РЛИ только навигационных ошибок ЛА по счисляемым координатам.
Полагая, что средствами БРЛС также с высокой точностью (т.е. ошибки соответствующих оценок пренебрежимо малы) определяются наклонные дальности и доплеровские частоты отраженных радиолокационных сигналов, для ошибок определения координат элементов формируемого текущего РЛИ в рассматриваемой ЗСК с использованием формулы полного дифференциала можно записать


где

Из полученных выражений видно, что в рассматриваемой ЗСК плановые ошибки (Δхла, Δzла) счисления координат ЛА приводят к одинаковым смещениям всех элементов формируемого в ЗСК текущего РЛИ и не влекут за собой его искажений и разворота.
Влияние относительных ошибок вывода ЛА в точку визирования НУМ по высоте (Δhi) на плановые ошибки (Δxi, Δzi) оценок координат элементов НУМ в общем случае имеет иной характер.
Это влияние увеличивается при увеличении отношения hi, к Ri, росте модуля скорости изменения высоты полета (Vy) ЛА во время формирования текущего РЛИ, а также в условиях переднего и переднебокового обзоров (когда скорость сближения ЛА с элементами НУМ, определяемая соотношением  , соизмерима с Vg).
, соизмерима с Vg).
На рисунке (фиг.2) приведено изображение в рассматриваемой ЗСК тестового НУМ, включающего в свой состав 9 радиолокационных отражателей, находящихся друг от друга на расстоянии 450 метров (круглые отметки). Центр ЗСК (точка прицеливания) совмещен с центральным отражателем НУМ. Все элементы НУМ расположены на одной и той же высоте.
На этом же рисунке приведены отметки (крестообразные), полученные в результате формирования в рассматриваемой ЗСК соответствующего текущего радиолокационного изображения, при следующих параметрах полета ЛА:
|
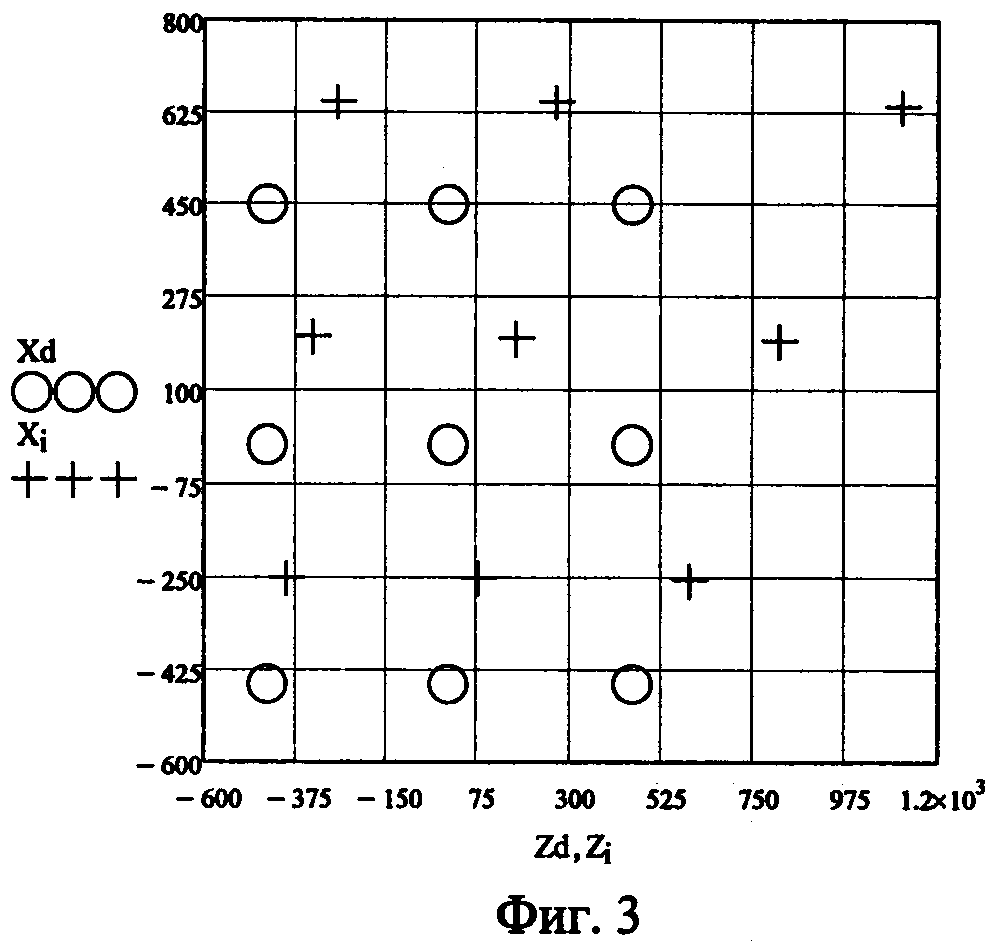
На рисунках (фиг.3 и 4) приведены отметки, соответствующие действительному положению указанных радиолокационных отражателей, и отметки, полученные в результате формирования в ЗСК текущих радиолокационных изображений, при следующих значениях ошибок счисления положения ЛА:
|
Скорость полета ЛА, азимутальный пеленг на точку прицеливания и азимутальный угол вектора скорости ЛА такие же, что и в предыдущем случае.
Из рисунков (фиг.3 и 4) видно, что в указанных условиях полета ЛА и наблюдения элементов НУМ ошибки оценки высоты полета ЛА приводят не только к сдвигу, но и к искажению текущих РЛИ НУМ, формируемых на борту ЛА в рассматриваемой ЗСК как при положительных, так и при отрицательных значениях ошибок оценки высоты полета ЛА. Эти искажения уменьшаются при стремлении указанных ошибок к нулю.
Данное обстоятельство делает возможным уточнение оценок высоты полета ЛА (yла), относительно ТП на НУМ путем определения максимума функционала вида Ф [F(JЭТ(х,z), JT(x,z/yла))], характеризующего изменение максимального значения функции F[JЭТ(x,z), JT(x,z/ула)) типа взаимокорреляционной, отражающей подобие заранее подготовленного в ЗСК эталонного РЛИ НУМ JЭТ, (x,z) и ряда текущих РЛИ НУМ {JT(x,z/yла=Yn)},  , формируемых в ЗСК в полете для априорно задаваемой совокупности {yла=Yn},
, формируемых в ЗСК в полете для априорно задаваемой совокупности {yла=Yn},  расчетных значений высоты полета ЛА.
расчетных значений высоты полета ЛА.
При наличии предварительной оценки высоты полета ЛА, например формируемой бортовым навигационным комплексом (инерциальной системой навигации) летательного аппарата (ула=Yнк), значения {Yn},  могут задаваться с учетом возможных отклонений {ΔYn},
могут задаваться с учетом возможных отклонений {ΔYn},  истинной высоты полета ЛА от ее предварительной оценки Yнк.
истинной высоты полета ЛА от ее предварительной оценки Yнк.
Указанные отклонения могут задаваться, например, в пределах, определяемых возможными ошибками оценки высоты полета ЛА, обеспечиваемыми его бортовым навигационным комплексом (НК).
При этом


где Yнк - оценка текущей высоты полета ЛА, сформированная бортовым НК ЛА;
 - нижняя граница оценки текущей высоты полета ЛА, с учетом возможных ошибок бортового НК ЛА;
- нижняя граница оценки текущей высоты полета ЛА, с учетом возможных ошибок бортового НК ЛА;
 - верхняя граница оценки текущей высоты полета ЛА, с учетом возможных ошибок бортового НК ЛА.
- верхняя граница оценки текущей высоты полета ЛА, с учетом возможных ошибок бортового НК ЛА.
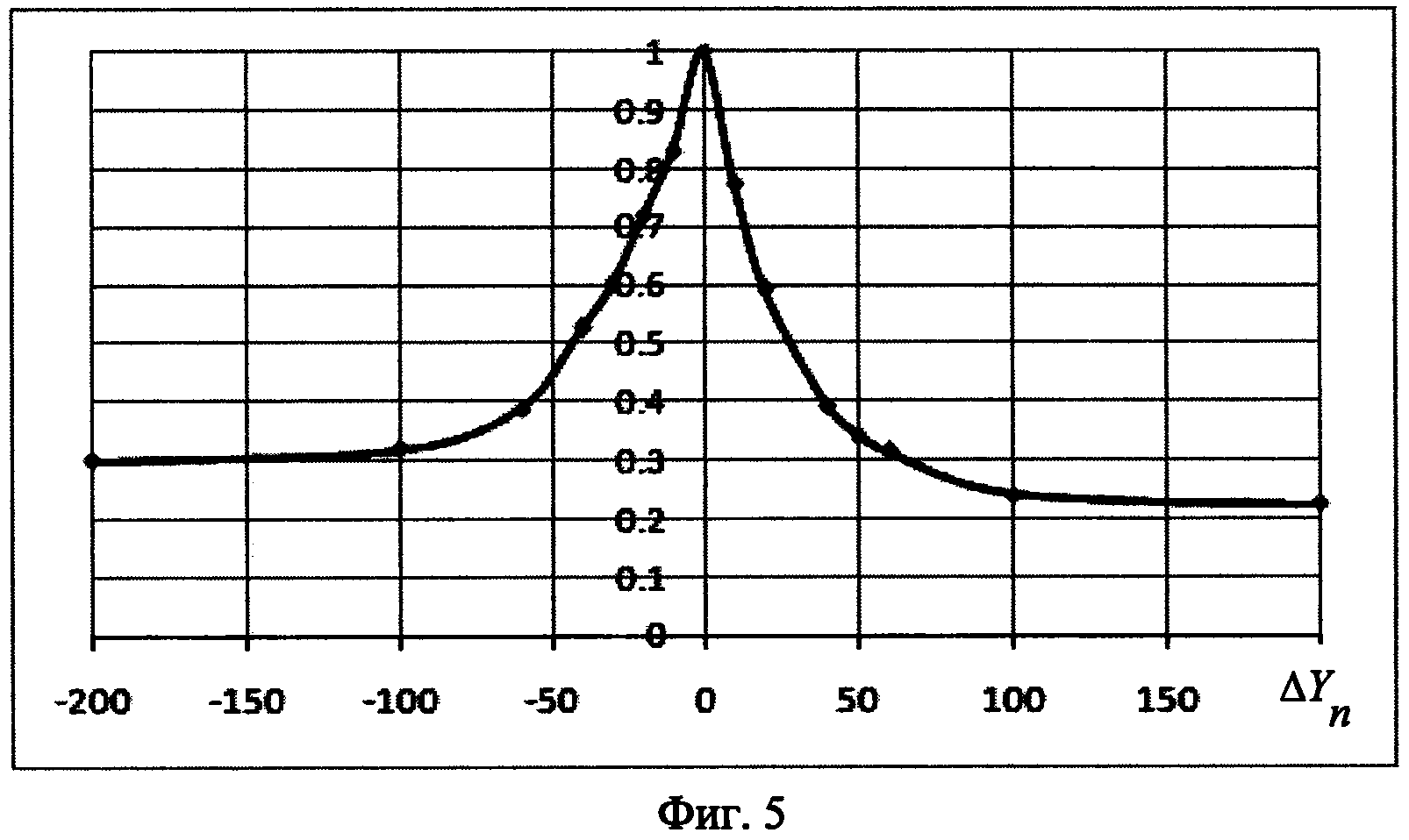
На рисунке фиг.5 приведен график, отражающий нормированную зависимость максимумов F(JЭТ(x,z), JT(x,z/Yнк-ΔYn)) от ΔYn, для рассмотренных выше тестовой позиции и условий полета ЛА. При этом предполагалось, что радиолокационные отражатели тестовой позиции не являются точечными, имеют диаметр (протяженность) 30 метров, и одинаковую удельную эффективную площадь отражения.

где ⊗ - символ, обозначающий двумерную свертку эталонного и текущего радиолокационных изображений.
Зависимость, представленная на рисунке фиг.5, имеет ярко выраженный максимум.
Несимметричность этой зависимости объясняется нелинейностью изменения значений величин cos(εi) и sin(εi), при отрицательных и положительных отклонениях расчетных значений высоты полета ЛА от ее реального значения.
Острота пика максимумов ВКФ характеризует потенциально достижимую точность оценки высоты полета ЛА предлагаемым способом в рассматриваемых условиях.
В том случае, когда осуществляется наблюдение НУМ с разновысотными элементами, при формировании текущего РЛИ НУМ в ЗСК для всех элементов НУМ можно полагать: hi=hТП=yла.
При этом для преобразования первичных текущих РЛИ из системы координат «доплеровская частота - наклонная дальность» в ЗСК НУМ будут использоваться следующие выражения.


где

Очевидно, что в этом случае смещение элементов НУМ относительно плоскости XOZ по высоте (yi≠0) эквивалентно наличию соответствующих ошибок в определении их относительных высот hi,. Данные ошибки влекут за собой плановые искажения текущих РЛИ в ЗСК, формируемых с использованием (17), (18). Эти искажения предсказуемы и должны учитываться при построении эталонных РЛИ.
В случае необходимости уменьшения искажений формируемых текущих РЛИ, возникающих за счет спекл-эффекта, возможно использование некогерентного сложения кадров текущих РЛИ, сформированных в выбранной ЗСК, для каждого априорно задаваемого расчетного значения высоты полета ЛА.
Следует отметить, что при определении относительной высоты полета ЛА в соответствии с изложенным выше одновременно осуществляется привязка ЛА к НУМ по плановым координатам (х,z), обеспечивающая последующее приведение ЛА к цели или посадку ЛА.
С учетом изложенного, предлагаемый способ оценки высоты полета летательного аппарата по радиолокационным изображениям земной поверхности (района заданной наземной цели или опорных участков местности), формируемым БРЛС ЛА с использованием синтезирования антенного раскрыва реализуется следующим образом.
1. При подготовке полетного задания ЛА определяются подлежащие наблюдению участки местности (опорные или района расположения цели), по радиолокационным изображениям которых должна осуществляться оценка высоты полета ЛА. Для каждого НУМ назначается точка, относительно которой должна формироваться оценка высоты полета ЛА (точка прицеливания - ТП), задаются начало координат и направления осей ЗСК, исходя из условий навигационной задачи. Определяются условия начала формирования текущих РЛИ НУМ, например: достижение летательным аппаратом заданной дальности до ТП, заданной на НУМ.
2. Для каждого НУМ перед полетом или в процессе выполнения полета формируются в выбранной ЗСК эталонные РЛИ.
3. В полете осуществляется формирование кадров первичных текущих РЛИ НУМ с использованием CAP в системе координат «доплеровская частота - наклонная дальность».
4. Задается множество расчетных значений {Yn},  высот полета ЛА (например, с использованием выражения (15)), для которых будет осуществляться формирование текущих РЛИ в ЗСК НУМ.
высот полета ЛА (например, с использованием выражения (15)), для которых будет осуществляться формирование текущих РЛИ в ЗСК НУМ.
5. Для каждого значения высоты полета ЛА из заданного набора расчетных значений высот осуществляется (с использованием выражений типа (11), (12) или (17), (18)) преобразование кадров первичных текущих РЛИ из системы координат «доплеровская частота - наклонная дальность» в совокупность (массив) кадров текущих РЛИ в выбранной ЗСК.
С целью устранения спекл-эффекта осуществляется некогерентное суммирование кадров текущих РЛИ НУМ, сформированных в ЗСК из кадров первичных РЛИ НУМ при одинаковых расчетных значениях высоты полета ЛА.
6. Производится сопоставление эталонного РЛИ НУМ и каждого РЛИ НУМ из состава сформированной в ЗСК совокупности текущих радиолокационных изображений опорного участка местности с оценкой максимумов функции, отражающей взаимную корреляцию указанных РЛИ при изменении взаимного положения текущего и эталонного РЛИ по координатам х,z.
По результатам сопоставления формируется множество значений максимумов функции, отражающей взаимную корреляцию эталонного РЛИ НУМ и текущих РЛИ НУМ в ЗСК. Каждый из этих максимумов соответствует конкретному задаваемому расчетному значению высоты полета ЛА.
7. На основе сопоставления значений максимумов функции, отражающей взаимную корреляцию эталонного РЛИ НУМ и текущих РЛИ НУМ в ЗСК, в качестве оценки высоты полета ЛА принимается то расчетное значение высоты полета, для которого величина указанного максимума является наибольшей.
На рисунке фиг.6 представлена упрощенная структурная схема возможного варианта БРЛС, реализующей предлагаемый способ оценки высоты полета летательного аппарата по радиолокационным изображениям земной поверхности,
где:
1 - антенна БРЛС;
2 - переключатель прием - передача БРЛС;
3 - передатчик БРЛС;
4 - синхронизатор БРЛС;
5 - цифровое устройство управления БРЛС;
6 - когерентный приемник БРЛС;
7 - аналого-цифровой преобразователь;
8 - блок первичной обработки и запоминания траекторного сигнала;
9 - блок преобразования Фурье;
10 - блок преобразования первичного текущего РЛИ из системы координат «доплеровская частота - наклонная дальность» в ЗСК;
11 - блок вычисления максимумов ВКФ эталонного и текущих РЛИ в ЗСК;
12 - блок формирования оценки высоты полета ЛА;
13 - бортовой навигационный комплекс управления ЛА.
Представленный на рисунке фиг.6 вариант БРЛС с CAP, реализующей предлагаемый способ оценки высоты полета летательного аппарата по радиолокационным изображениям земной поверхности, функционирует следующим образом.
При достижении летательным аппаратом участка траектории полета, на котором должна осуществляться оценка высоты полета ЛА, антенна 1 БРЛС под управлением, поступающим от цифрового устройства управления 5, устанавливается по направлению визирования заданного участка местности. Антенна осуществляет излучение зондирующих радиолокационных сигналов, поступающих через переключатель приема-передачи 2 от передатчика 3, управляемого синхронизатором 4 БРЛС, а также прием отраженных сигналов, обеспечивая их пространственную селекцию. Через переключатель приема-передачи 2 принимаемые сигналы поступают на вход приемника 6 БРЛС, с выходов которого в квадратурах поступают на вход многоканального аналого-цифрового преобразователя 7. Преобразованные в цифровую форму принимаемые радиолокационные сигналы перемножаются с опорной функцией в блоке 8 первичной обработки и запоминания траекторного сигнала, которое осуществляется с целью фокусировки синтезируемых радиолокационных изображений наблюдаемого участка земной поверхности. При этом в блоке 8 формируются и запоминаются массивы данных, которые подвергаются быстрому преобразованию Фурье блоком 9, с использованием которого формируются первичные текущие радиолокационные изображения наблюдаемого участка местности в системе координат «доплеровская частота - наклонная дальность». Эти изображения поступают в блок 10 преобразования первичных текущих РЛИ из системы координат «доплеровская частота - наклонная дальность» в текущие РЛИ, представленные в земной системе координат.
Блоком 10 преобразование текущих РЛИ из системы координат «доплеровская частота - наклонная дальность» в земную систему координат осуществляется для набора {Yn},  возможных расчетных значений высоты полета ЛА, поступающих в блок 10 из цифрового устройства управления 5 БРЛС, управляющего также режимами работы синхронизатора 4 БРЛС.
возможных расчетных значений высоты полета ЛА, поступающих в блок 10 из цифрового устройства управления 5 БРЛС, управляющего также режимами работы синхронизатора 4 БРЛС.
С целью устранения спекл-эффекта блоком 10 осуществляется некогерентное суммирование кадров текущих РЛИ ОУМ, сформированных в ЗСК из кадров первичных текущих РЛИ ОУМ при одинаковых расчетных значениях высоты полета ЛА.
Набор возможных расчетных значений высоты полета ЛА формируется цифровым устройством управления 5 БРЛС на основе данных, поступающих из бортового навигационного комплекса 13 ЛА, в пределах, обеспечиваемых этим комплексом ошибок оценивания указанной высоты.
Из блока 10 текущие РЛИ, представленные в ЗСК, поступают в блок 11, где каждое из этих РЛИ подвергается взаимокорреляционной обработке с поступающим из цифрового устройства управления (блок 5) эталонным РЛИ наблюдаемого участка местности при взаимном изменении положения текущего и эталонного РЛИ по координатам х,z.
По результатам этой обработки каждому значению из набора {Yn},  возможных текущих значений высоты полета ЛА сопоставляется значение
возможных текущих значений высоты полета ЛА сопоставляется значение  максимума функции, отражающей взаимную корреляцию эталонного и текущих РЛИ, представленных в ЗСК.
максимума функции, отражающей взаимную корреляцию эталонного и текущих РЛИ, представленных в ЗСК.
Значения {M(Yn)},  передаются из блока 11 в блок 12 формирования оценки высоты полета ЛА, в котором в качестве указанной оценки принимается значение Yn, соответствующее наибольшему значению из всех максимумов функции, отражающей взаимную корреляцию эталонного и текущих РЛИ, представленных в ЗСК.
передаются из блока 11 в блок 12 формирования оценки высоты полета ЛА, в котором в качестве указанной оценки принимается значение Yn, соответствующее наибольшему значению из всех максимумов функции, отражающей взаимную корреляцию эталонного и текущих РЛИ, представленных в ЗСК.
Данная оценка из блока 12 поступает цифровое устройство управление БРЛС (блок 5) и далее в бортовой навигационный комплекс (блок 13) летательного аппарата.
Предлагаемый способ оценки высоты полета летательного аппарата по радиолокационным изображениям земной поверхности прошел математическое моделироваение и экспериментальную апробацию.
Результаты исследований подтвердили работоспособность предлагаемого способа оценки высоты полета летательного аппарата по радиолокационным изображениям земной поверхности.
Предлагаемый способ оценки высоты полета летательного аппарата по радиолокационным изображениям земной поверхности позволяет обеспечить высокую точность получения оценок высоты полета ЛА относительно наблюдаемых участков местности с помощью бортовых радиолокационных средств.
Использование предлагаемого способа не накладывает никаких дополнительных ограничений на элементную базу и вполне возможно при существующих характеристиках вычислителей БРЛС с CAP по их быстродействию и объему памяти.
Источники литературы
1. Жуковский А.П. и др. Теоретические вопросы радиовысотометрии. - М.: Советское радио, 1979, с.10-17.
2. Изделие РВЭ. Техническое описание ГУ 1.000.076-05ТО / УПКБ "Деталь", 1999, с.15.
3. Изделие А-035. Руководство по эксплуатации / УПКБ "Деталь", 1985, с.21.
4. Патент США US №5430445, 12.31.1992, G01S 13/90 - прототип.
5. Меркулов В.И., Дрогалин В.В., Канащенков А.И. и др. Авиационные системы радиоуправления. Т.2. Радиоэлектронные системы самонаведения / под. ред. А.И. Канащенкова и В.И. Меркулова. М.: Радиотехника, 2003.
6. Козаев А.А., Колтышев Е.Е., Фролов А.Ю., Янковский В.Т. Алгоритм доплеровского измерения скорости в РЛС с синтезированной апертурой. // Радиотехника, 2005, №6, с.13.
Способ оценки высоты полета летательного аппарата по радиолокационным изображениям земной поверхности, заключающийся в том, что в полете летательного аппарата (ЛА) его бортовой радиолокационной станцией с использованием синтезирования апертурного раскрыва антенны получают радиолокационные изображения наблюдаемого участка местности, относительно которого подлежит оценке высота полета летательного аппарата, отличающийся тем, что для оценки высоты полета летательного аппарата относительно наблюдаемого участка местности текущее радиолокационное изображение этого участка, получаемое бортовой радиолокационной станцией с использованием синтезирования антенного раскрыва в полете летательного аппарата в системе координат «доплеровская частота - наклонная дальность», преобразуют в совокупность текущих радиолокационных изображений наблюдаемого участка местности в земной системе координат, каждое из которых соответствует определенному значению расчетной высоты полета ЛА относительно наблюдаемого участка местности, задаваемому из набора различающихся между собой априорных значений расчетных высот полета ЛА, далее получают оценки максимальных значений двумерной функции, отражающей взаимную корреляцию заранее подготовленного в той же самой земной системе координат эталонного радиолокационного изображения наблюдаемого участка местности и текущих радиолокационных изображений этого участка из их сформированной совокупности при изменении взаимного положения каждого текущего и эталонного радиолокационных изображений по плановым координатам (х, z), из полученных оценок максимальных значений выбирают наибольшее и соответствующее этому максимуму расчетное значение высоты полета ЛА принимают за действительное.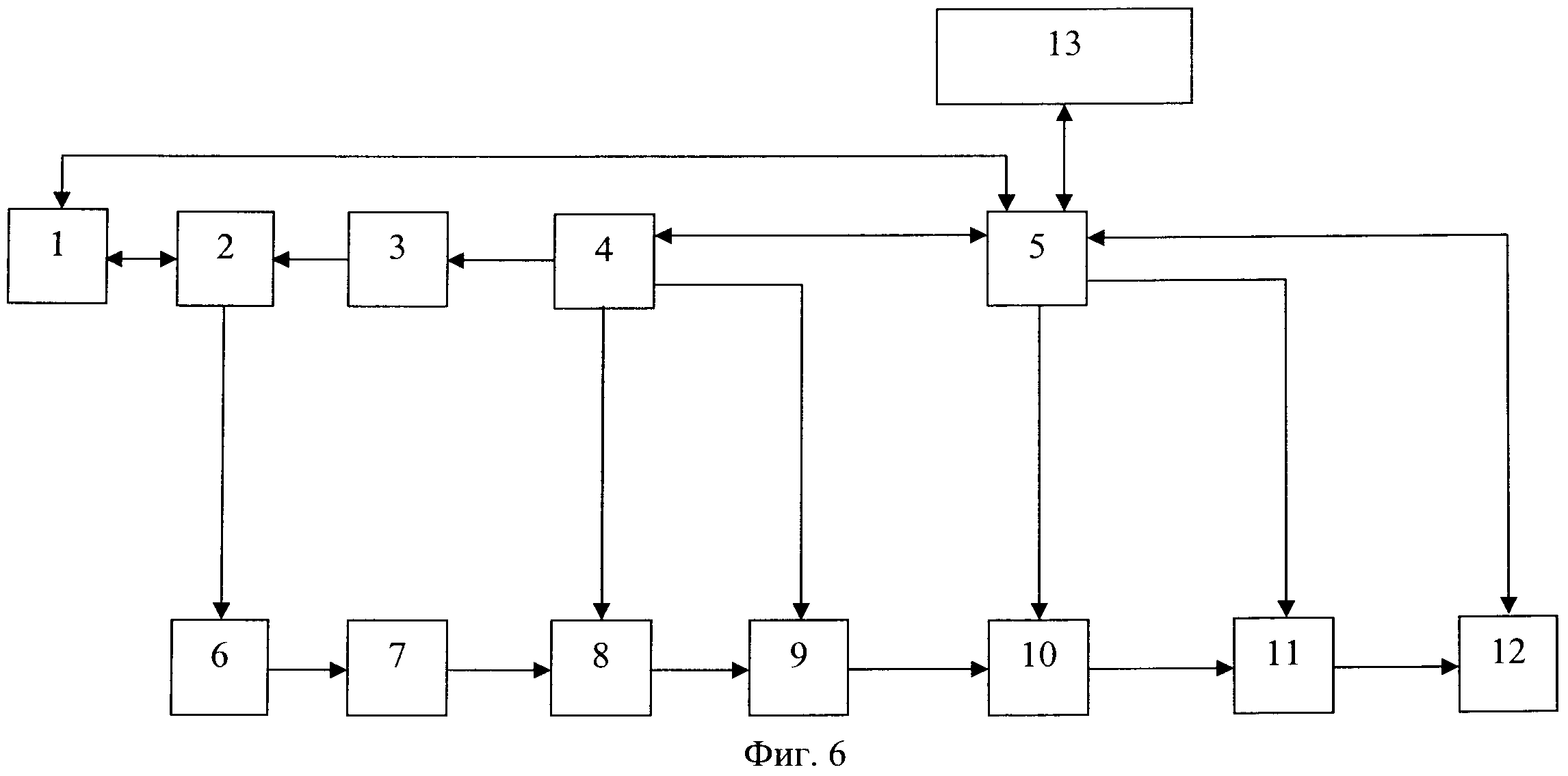
Радиолокационная станция автоматического сопровождения цели по направлению
Трансрефлектор
Чувствительный элемент на поверхностных акустических волнах для измерения температуры
Антенное устройство
Способ формирования изображения земной поверхности в радиолокационной станции с синтезированием апертуры антенны
Способ обработки радиолокационных сигналов в моноимпульсной рлс
Способ обработки радиолокационных сигналов в моноимпульсной рлс
Вариометр
Ключевое радиопередающее устройство
Привод поршневого контакта электровыключателя
Привязной аэростат
Устройство охлаждения универсального блока вертикальной тросовой антенны

