Результат интеллектуальной деятельности: АДАПТИВНОЕ УПРАВЛЕНИЕ ПОДВЕСКОЙ ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Настоящее изобретение относится к системе управления подвеской транспортного средства, которая способна изменять жесткость подвески в движущемся транспортном средстве, и к способу управления такой системой подвески.
Патент США 6879898 B2 раскрывает систему управления ходовой частью транспортного средства, в которой жесткость системы подвески изменяется согласно требованию водителя. Чтобы предотвратить угрозу безопасности, которая может возникнуть, если водитель выбирает настройку жесткости, которая непригодна для текущего режима движения транспортного средства, эта традиционная система подвески наблюдает за режимом движения транспортного средства и отклоняет изменение настройки жесткости, если они определены как неподходящие для текущего режима движения транспортного средства. Такая система управления подвеской позволяет водителю адаптировать характер поведения системы подвески под свой персональный стиль. Водитель, которому нравится спортивный стиль вождения, может захотеть предпочтительно высокую жесткость подвески, чтобы улучшить сцепление транспортного средства на поверхности дороги, так что движением транспортного средства можно точно управлять даже при движении по изгибам дороги с высокой скоростью. В другое время тот же водитель может предпочитать более мягкую настройку системы подвески, хотя это может потребовать от него ехать по изгибам дороги с умеренной скоростью. В любом случае какое-либо изменение в настройках системы подвески требует сознательного принятия решения водителем. Поскольку водитель должен непрерывно внимательно следить за дорожным движением вокруг него, непрактично для него повторять это принятие решения очень часто. Режим движения транспортного средства, следовательно, будет изменяться много раз: от движения в повороте к движению по прямой линии, от крейсерского режима к ускорению или торможению и т.д. - водитель не имеет возможности адаптировать настройки подвески к каждому из этих режимов. В результате, если водитель выбрал мягкую настройку для системы подвески, она может быть очень комфортной для крейсерского режима, но в случае быстрого торможения или ускорения или быстрого прохождения крутого виража управление автомобилем может стать затруднительным. Если водитель выбрал жесткую настройку, чтобы подготовиться к возможным быстрым маневрам при движении в повороте, то во время крейсерского режима движения транспортного средства снижается комфорт.
Целью настоящего изобретения является устранение этого недостатка и создание системы управления подвеской и способа управления, которые позволяют объединить отличную маневренность при движении в повороте с высокой степенью комфорта.
Эта цель достигается системой управления подвеской для транспортного средства, имеющего ходовую часть и колеса, соединенные с ходовой частью посредством системы подвески, жесткость которой изменяется под управлением системы управления подвеской, при этом контроллер этой системы управления выполнен с возможностью автономного изменения жесткости системы подвески в зависимости от текущего режима движения транспортного средства. Так как система управления подвеской всегда будет использовать первую степень жесткости, например, при крейсерском режиме и другую степень жесткости, например, при движении в повороте, водитель обычно не будет замечать, что жесткость переключается, так как он никогда не испытает ощущений от движения в повороте с первой степенью жесткости. Водитель будет ощущать подвеску транспортного средства, которая объединяет высокую степень комфорта при крейсерском режиме движения с исключительной маневренностью при движении в повороте или в переходных ситуациях.
Чтобы распознать движение в повороте, контроллер предпочтительно соединен с датчиком поперечного ускорения и выполнен с возможностью определения различий между режимом движения с высоким поперечным ускорением и режимом движения с низким поперечным ускорением и установки более высокой жесткости системы подвески в режиме с высоким поперечным ускорением, чем в режиме с низким поперечным ускорением.
Аналогично, контроллер может быть соединен с датчиком угловой скорости рыскания и выполнен с возможностью определения различий между режимом движения с высокой угловой скоростью рыскания и режимом движения с низкой угловой скоростью рыскания и установки более высокой жесткости системы подвески в режиме с высокой угловой скоростью рыскания, чем в режиме с низкой угловой скоростью рыскания.
Контроллер может также быть выполнен с возможностью определения скорости бокового скольжения транспортного средства для определения различий между режимом движения с высокой скоростью бокового скольжения и режимом движения c низкой скоростью бокового скольжения и установки более высокой жесткости системы подвески в режиме с высокой скоростью бокового скольжения, чем в режиме с низкой скоростью бокового скольжения.
Предпочтительно, определение скорости бокового скольжения может быть основано на данных об угловой скорости рыскания от датчика угловой скорости рыскания и данных о поперечном ускорении от датчика поперечного ускорения.
Кроме того, контроллер может быть соединен с датчиком продольного ускорения и может быть выполнен с возможностью определения различий между режимом движения с высоким продольным ускорением и режимом движения с низким продольным ускорением и установки более высокой жесткости системы подвески в режиме с высоким продольным ускорением, чем в режиме с низким продольным ускорением для обеспечения высокого сцепления с дорогой при ускорении.
Аналогично, контроллер может быть выполнен с возможностью определения различий между режимом движения с положительным продольным ускорением и режимом движения с отрицательным продольным ускорением, т.е. торможением, и установки более высокой жесткости системы подвески в режиме с отрицательным продольным ускорением, чем в режиме с положительным продольным ускорением.
Когда автомобиль движется медленно, например при маневрировании в гараж или из него, может быть необходимым иметь более жесткую настройку системы подвески, чем при поездке с обычной скоростью в городском или наземном дорожном движении. Следовательно, контроллер может также быть выполнен с возможностью определения различий между режимом движения на высокой скорости движения вперед и режимом движения на низкой (включающей в себя отрицательную) скорости движения вперед и установки более высокой жесткости системы подвески в режиме с высокой скоростью движения вперед, чем в режиме с низкой скоростью движения вперед.
Чтобы определить переходные ситуации, т.е. ситуации, в которых направление транспортного средства быстро изменяется - несмотря на короткое время, которое транспортное средство может двигаться прямо вперед - предпочтительно, чтобы контроллер был соединен с датчиком угла поворота рулевого колеса и выполнен с возможностью определения различий между режимом движения с высокой угловой скоростью рулевого колеса и режимом движения с низкой угловой скоростью рулевого колеса. В переходном режиме, соответствующем высокой угловой скорости рулевого колеса, жесткость системы подвески должна быть установлена более высокой, чем в режиме низкой угловой скорости рулевого колеса.
С той же целью контроллер может быть выполнен с возможностью выполнен с возможностью определения производной по времени угловой скорости рыскания, определения различий между режимом высокой производной угловой скорости рыскания и режимом низкой производной угловой скорости рыскания и установки более высокой жесткости системы подвески в режиме высокой производной угловой скорости рыскания, чем в режиме низкой производной угловой скорости рыскания.
Предпочтительно, состояниям присваиваются множество дискретных значений жесткости системы подвески. Хотя система подвески, по существу, может позволять непрерывное изменение жесткости, предпочтителен выбор дискретных значений, так как, если существуют другие параметры ходовой части транспортного средства, которые непрерывно регулируются согласно режиму движения транспортного средства, например, распределение крутящего момента на передние и задние колеса, или зависимость между углом поворота рулевого колеса и углом передних колес, поворачиваемых им, число возможных комбинаций параметров является ограниченным. Это позволяет конструктору транспортного средства проверить каждую комбинацию параметров на предмет рабочей безопасности или других критериев и исключить выбор неблагоприятной комбинации параметров.
Также предпочтительно, чтобы контроллер сохранял, по меньшей мере, схемы для присваивания значения жесткости каждому режиму, и чтобы он имел пользовательский интерфейс, позволяющий пользователю выбирать между указанными, по меньшей мере, двумя схемами. В этом способе пользователь еще имеет возможность адаптации характера поведения транспортного средства к своему персональному стилю, выбирая, например, между схемой, оптимизированной для комфорта, и другой схемой, оптимизированной для спортивного вождения.
Цель дополнительно достигается способом регулирования жесткости системы подвески в транспортном средстве, включающим этапы определения текущего режима движения транспортного средства;
установки значения жесткости системы подвески связанного с текущим режимом движения всякий раз, когда наблюдается изменение режима движения.
Изобретение может быть осуществлено посредством программного продукта для процессора данных, содержащего носитель данных, на котором записаны в машиночитаемой форме программные инструкции, позволяющих процессору данных сформировать контроллер системы управления подвеской, описанной выше, или выполнить вышеописанный способ.
Дополнительные признаки и преимущества изобретения станут очевидны из последующего описания вариантов его осуществления со ссылкой на прилагаемые чертежи.
Фиг. 1 является блок-схемой транспортного средства, оборудованного адаптивным управлением подвеской согласно изобретению;
Фиг. 2 является блок-схемой первой части процесса управления, реализуемого контроллером транспортного средства на фиг. 1; и
Фиг. 3 является блок-схемой второй части процесса управления.
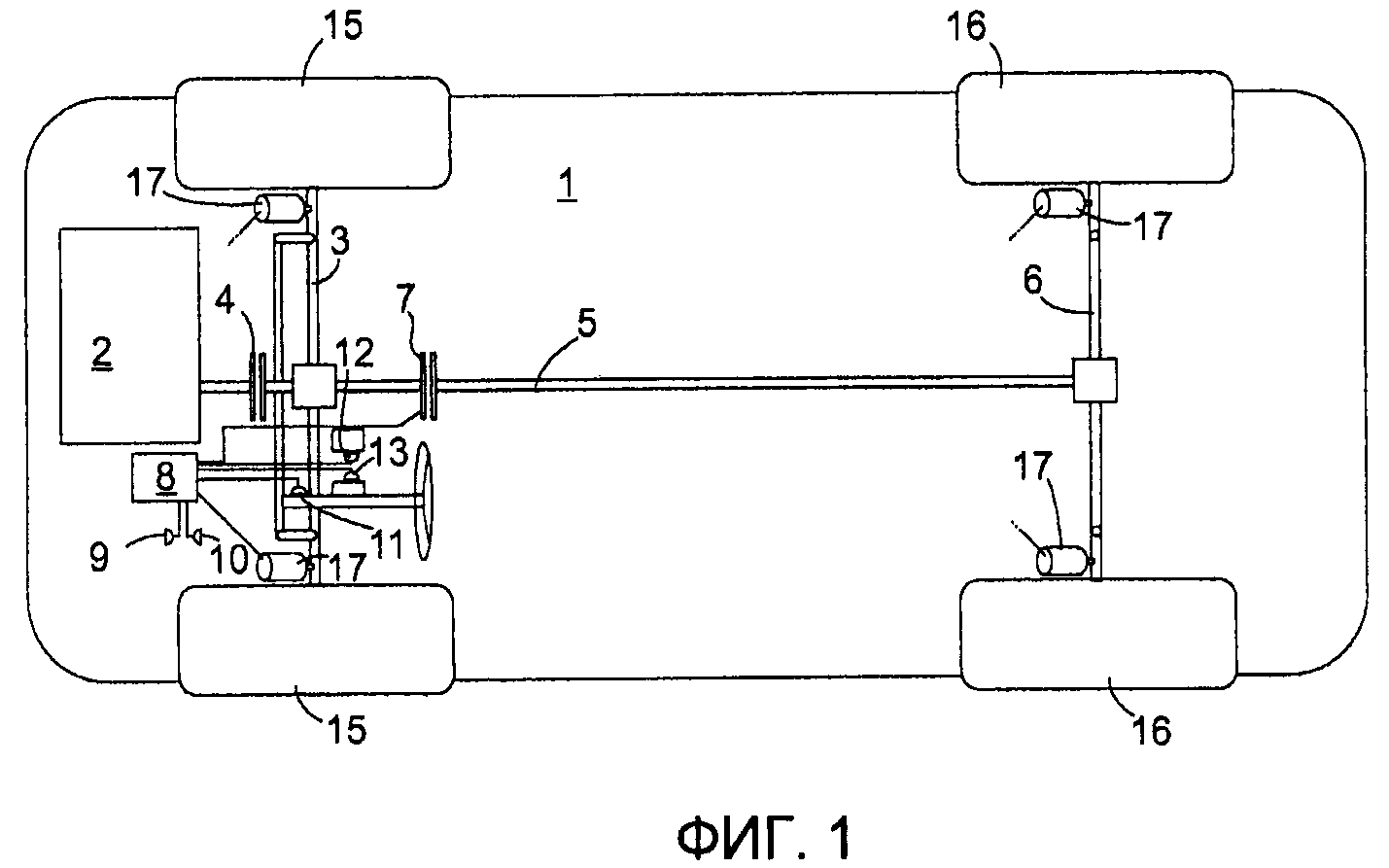
Фиг. 1 является схематичной блок-схемой транспортного средства, воплощающего настоящее изобретение. Транспортное средство имеет двигатель 2 внутреннего сгорания, который приводит в движение колеса 15 передней оси 3 через первое сцепление 4. На ведущем валу 5 между передней осью 3 и задней осью 6 предусмотрено второе сцепление 7. Второе сцепление 7 находится под управлением схемы 8 микропроцессорного контролера. Если второе сцепление 7 разомкнуто, транспортное средство приводится только передними колесами 15; если оно сомкнуто, оно дополнительно приводится задними колесами 16. Соотношение между крутящим моментом, приложенным к передним колесам 15, и моментом, приложенным к задним колесам 16, может изменяться схемой 8 контроллера.
Амортизаторы 17 предусмотрены рядом с колесами 15, 16 на передней и задней осях 3, 6. Жесткость амортизаторов 17 изменяется под управлением схемы 8 контроллера.
Схема 8 контроллера имеет множество датчиков, соединенных с ней, такие как датчик 9 ускорения для определения продольного и поперечного ускорения транспортного средства 1, датчик 10 угловой скорости рыскания или датчик 12 педали акселератора. Датчик 12 педали акселератора может быть заменен датчиком заслонки всасываемого воздуха, не показан, или сигналом расхода подачи топлива от электронной системы управления двигателем, не показана, так как положение заслонки или расход топлива обычно непосредственно управляются на основании положения педали акселератора.
Кроме того, предусмотрен датчик 13 тормоза. Этот датчик может определять положение педали тормоза, или он может быть датчиком давления для определения давления тормозной жидкости, которая используется для приведения в движение колесных тормозов, не показаны, на колесах 15, 16 образом, хорошо известным специалисту в данной области техники.
Работа схемы 8 контроллера будет описана со ссылкой на блок-схемы на фиг. 2 и 3. Эти чертежи иллюстрируют две части процесса управления, который выполняется повторяющимся образом схемой 8 контроллера в постоянных временных интервалах или запускается посредством существенного изменения параметра, относящегося к движению транспортного средства, пока транспортное средство движется.
На первом этапе S1 схема 8 контроллера проверяет, вмешивается ли активно любая электронная система стабилизации, которая может присутствовать в транспортном средстве 1, такая как традиционная ABS- или ESP-система, в управление транспортным средством. Если это так, процесс на фиг. 2 прекращается, чтобы избежать какого-либо нежелательного взаимодействия с электронной системой стабилизации, и будет начат или запущен снова в более поздний момент или как только система стабилизации станет неактивной.
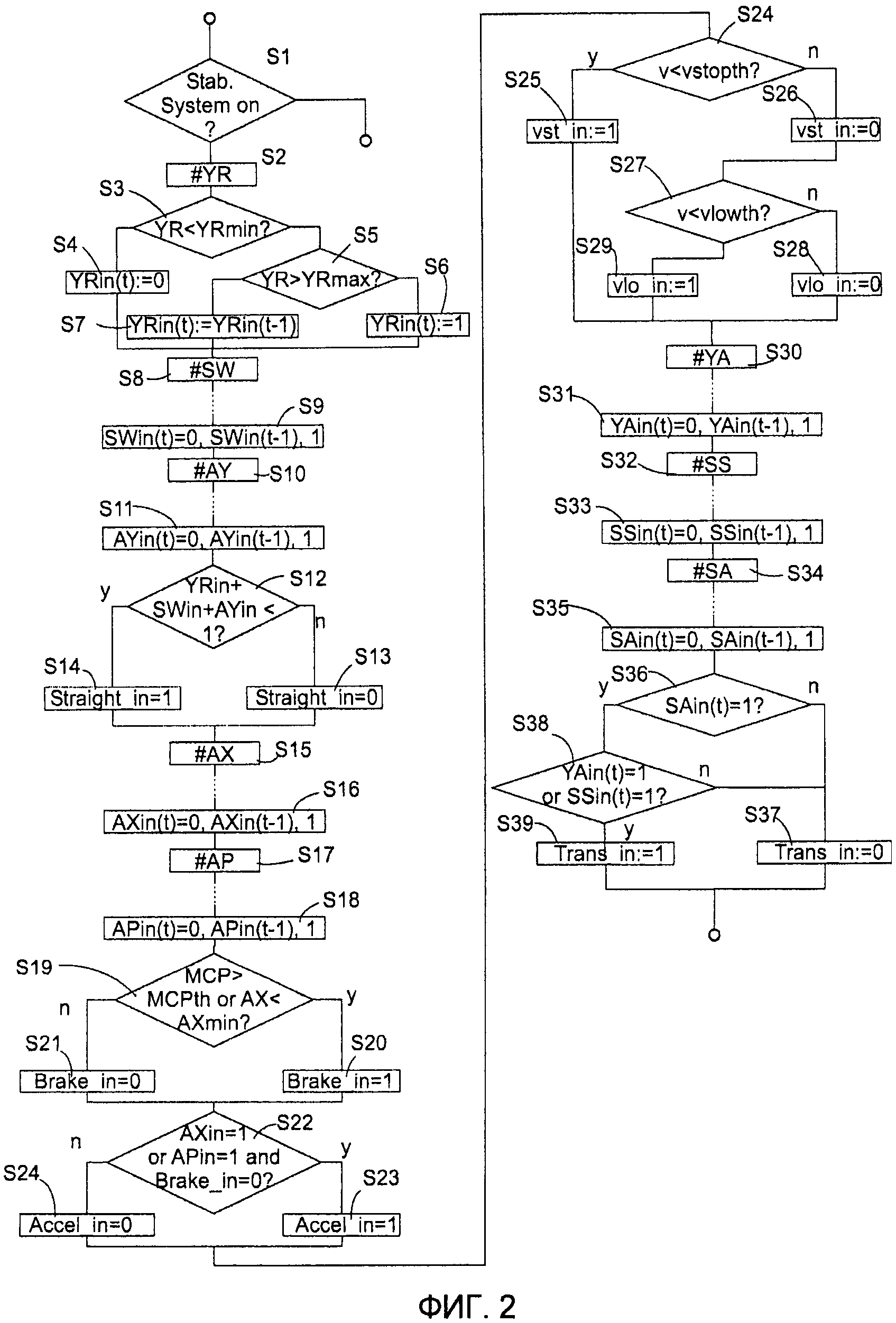
Процесс на фиг. 2 измеряет множество связанных с движением транспортного средства параметров и преобразует их в двоичные индексы. Способ, которым это делается, похож для многих параметров и будет пояснен здесь только один раз со ссылкой на угловую скорость рыскания YR от датчика 10 угловой скорости рыскания, понятно, что похожий процесс выполняется при неизменности всех факторов для других параметров, которые будут упомянуты позже в этом описании.
На этапе S2 схема 8 контроллера принимает текущее измеренное значение угловой скорости рыскания YR от датчика 10 угловой скорости рыскания. На этапе S3 это значение YR сравнивается с заданным нижним пороговым значением YRmin. Если определяется, что YR ниже этого порогового значения, этап S4 устанавливает текущее значение индекса YRin(t) угловой скорости рыскания равным нулю. Если YR выше первого порогового значения, она сравнивается со вторым, более высоким пороговым значением YRmax на этапе S5. Если YR превышает это второе пороговое значение, индекс YRin(t) устанавливается в 1 на этапе S6. Если YR ниже второго порогового значения YRmax, индекс YRin(t) сохраняется в значении YRin(t-1), которое он принял в предыдущей итерации процесса (S7).
Похожим способом угол SW поворота рулевого колеса получается от датчика 11 угла поворота рулевого колеса на этапе S8, и на основании сравнения с двумя пороговыми значениями настоящее значение индекса SWin(t) рулевого колеса устанавливается в 0, в 1 или остается идентичным своему предыдущему значению SWin(t-1) на этапе S9.
Тем же способом поперечное ускорение AY считывается из датчика 9 ускорения, и индекс AYin(t) поперечного ускорения устанавливается согласно этому считыванию на этапе S11.
Этап S12 проверяет, равен ли любой из индексов YRin, SWin, AYin, определенных выше, 1, указывающей, что транспортное средство проходит по закруглению дороги. Если так, индекс Straight_in движения по прямой устанавливается в 0 (S13), если нет, он устанавливается в 1 (S14).
На этапе S15 текущее продольное ускорение AX получается от датчика 9 ускорения, и из этого извлекается индекс AXin(t) продольного управления, как описано выше для YR (S16). Тем же способом индекс APin(t), указывающий, нажата ли педаль акселератора достаточно, чтобы ускорить транспортное средство, определяется на этапах S17, S18. Индекс, имеющий то же значение, может альтернативно быть получен из положения заслонки всасываемого воздуха или также из расхода подачи топлива в двигатель.
Этап S19 проверяет, находится ли транспортное средство в режиме торможения или нет, посредством либо сравнения продольного ускорения AX из этапа S15 с пороговым значением AXmin или посредством сравнения давления MCP тормозной жидкости с пороговым значением MCPth. Если одно из этих пороговых значений превышено, индекс Brake_in торможения устанавливается в 1 (S20), иначе в 0 (S21).
Если либо AXin=1, указывающий существенное ускорение транспортного средства, либо APin=1, указывающий предстоящее ускорение, и Brake_in=0, тот индекс Accel_in ускорения устанавливается в 1 (S23), иначе в 0 (S24).
На основании сравнения скорости v транспортного средства с очень низким пороговым значением vstopth индекс vst_in остановки устанавливается в 1 (S25), указывая, что транспортное средство движется, или в 0, указывая, что оно остается практически неподвижным. Если определено, что транспортное средство движется, его скорость v сравнивается с другим пороговым значением vlowth, доходящим до нескольких километров в час. Если пороговое значение превышено, указывая, что транспортное средство движется в обычном транспортном потоке, индекс vlo_in устанавливается в 0 (S28). Если v ниже vlowth, вероятно, что транспортное средство выполняет трудный маневр, как, например, движение в гараж или из него, и vlo_in устанавливается в 1 (S29).
На этапе S30 вычисляется угловое ускорение рыскания YA, т.е., производная по времени от угловой скорости рыскания YR, измеренной на этапе S2, и индекс YAin(t) углового ускорения рыскания получается на основании сравнения с двумя пороговыми значениями на этапе S31. Этап S32 вычисляет скорость SS бокового скольжения транспортного средства как следующую SS=AY-YR*v на основании поперечного ускорения AY и угловой скорости рыскания YR, измеренных на этапах S10 и S2 соответственно. Тем же способом, что и для других параметров, упомянутых выше, связанный индекс SSin(t) получается на этапе S33 посредством сравнения с двумя пороговыми значениями. Индекс SSin равен 0, если нет существенного бокового скольжения, и он равен 1, если есть.
Этап S34 вычисляет производную SA по времени от угла SW поворота рулевого колеса. На этапе S35 индекс SAin(t) скорости поворота рулевого колеса устанавливается в 0, если нет существенного перемещения рулевого колеса, и в 1, если есть.
Если SAin(t) равен 0 на этапе S36, т.е. если рулевое колесо поворачивается медленно или вообще не поворачивается, предполагается, что транспортное средство не находится в переходном режиме. Это отражено индексом Trans_in перехода, устанавливаемым в 0 на этапе S37. Если SAin(t) равно 1, этап S38 дополнительно проверяет, равен ли 1, по меньшей мере, один из индексов YAin(t) или SSin(t). Если это условие удовлетворяется, предполагается, что транспортное средство должно быть в переходном режиме, т.е. Trans_in устанавливается в 1 на этапе S39.
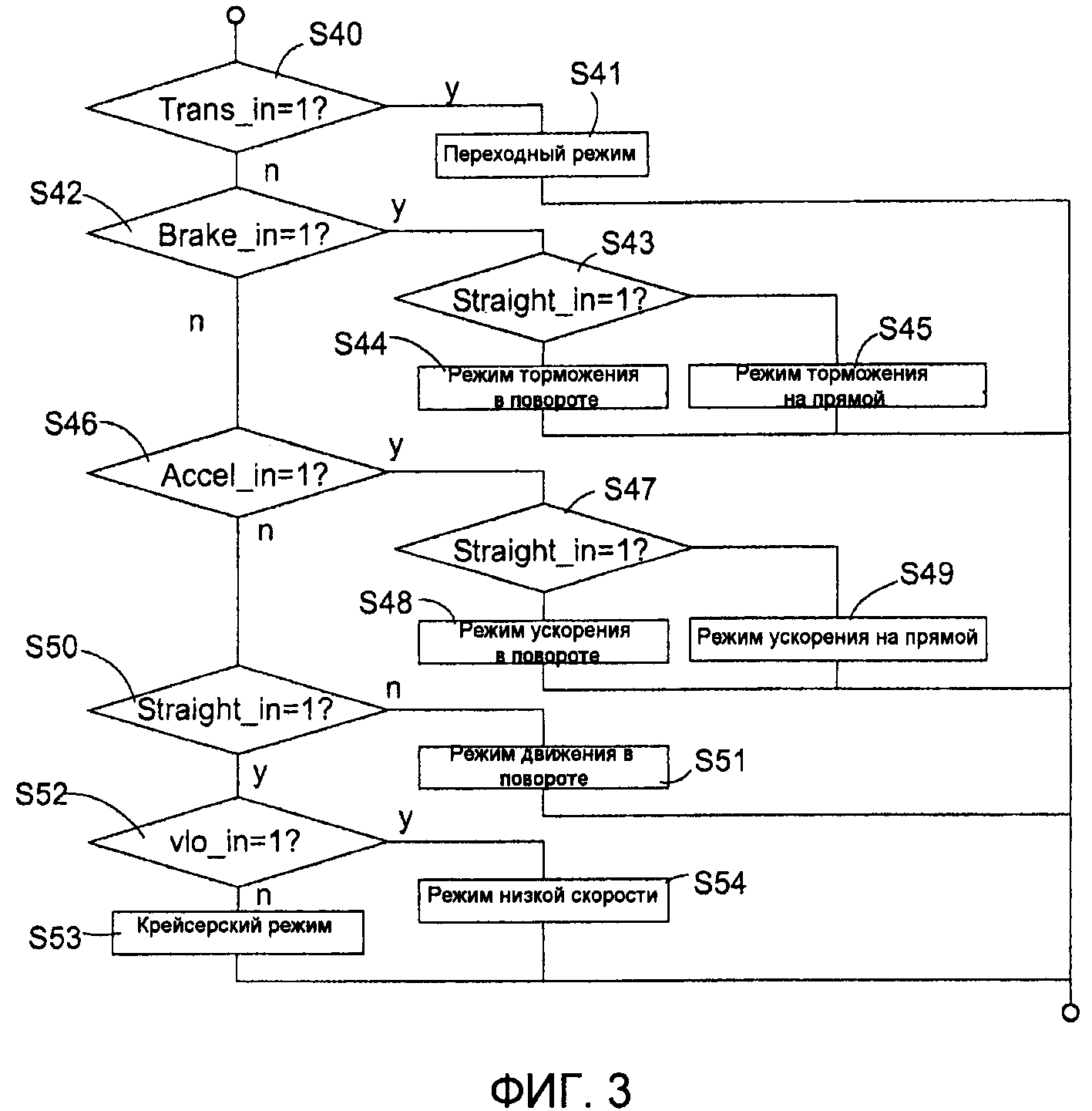
Режим движения транспортного средства, таким образом, был оценен, и контроллер переходит ко второй части процесса, показанной на фиг. 3. Если индекс Trans_in переходного режима определен равным 1 на этапе S40, значение жесткости амортизаторов 17, связанное с переходным режимом, на этапе S41 устанавливается высоким.
Если определено, что транспортное средство не находится в переходном режиме, индекс Brake_in торможения проверяется на этапе S42. Если он равен 1, индекс Straight_in движения по прямой проверяется на этапе S43. Если он равен 1, делается вывод о том, что транспортное средство находится в режиме торможения при движении в повороте, т.е. оно тормозит во время прохождения по закруглению дороги, на этапе S44, и значение жесткости, связанное с этим режимом, устанавливается в амортизаторах 17.
Если Straight_in=0, транспортное средство должно быть в режиме торможения по прямой, и амортизаторы 17 устанавливаются соответствующим образом на этапе S45.
Если транспортное средство не тормозит, способ проверяет режим ускорения на этапе S46. Если Accel_in = 1, то индекс Straight_in движения по прямой проверяется на этапе S47, и согласно его значению определяется, что транспортное средство находится в режиме ускорения при движении в повороте (S48) или в режиме ускорения по прямой (S49).
Если транспортное средство не ускоряется, также Strain_in опять проверяется на этапе S50, и, если он равен 1, соответствующая жесткость амортизаторов 17 для режима движения в повороте устанавливается на этапе S51.
Если транспортное средство не движется в повороте, индекс vlo_in скорости отсылается на этап S52, чтобы решить, находится ли транспортное средство в крейсерском режиме S53 или в режиме низкой скорости S54.
В Таблице 1 ниже приведены примеры схем посредством которых значения жесткости амортизаторов могут быть присвоены различным режимам движения транспортного средства, определенным выше. Числа в таблице 1 не являются количественными, предполагается, что четыре разных значения жесткости, упоминаемые как "1" по "4", могут быть установлены в амортизаторах, и что жесткость увеличивается от "1" до "4". Схема A является комфортно-ориентированным; в крейсерском режиме жесткость устанавливается в "1", т.е. очень мягкой. Низкая промежуточная жесткость "2" определяется для режимов низкой скорости и ускорения по прямой, тогда как все режимы движения в повороте, режимы торможения по прямой и переходные режимы имеют жесткость "3". Соответствие B более подходит для спортивного стиля вождения, так как амортизаторы, как правило, установлены в более высокую жесткость, чем согласно соответствию A. Опять же, самая низкая жесткость, "2", выбирается в крейсерском режиме, а наивысшая, "4", в переходном режиме, режимах движения в повороте и при ускоряющемся движении в повороте.
|
Если схема 8 контроллера имеет пользовательский интерфейс, где водитель может указать, предпочитает ли он комфортабельный или спортивный стиль вождения, разные схемы могут использоваться для связывания установок жесткости с различными режимами движения транспортного средства. Если водитель выбирает комфортабельный режим движения, реализованный схемой C1, амортизаторы устанавливаются мягкими в любом случае, т.е. жесткость "1" подходит для крейсерского режима и режима ускорения по прямой, тогда как всем другим режимам присвоена жесткость "2". Если водителю необходима промежуточная установка, может быть использована схема C2, которая выбирает самую мягкую установку "1" для амортизаторов только в крейсерском режиме, а промежуточное значение "2" во всех других. Амортизаторы управляются, чтобы быть в целом жестче, посредством использования схемы C3, которая устанавливает жесткость "2" для крейсерского режима, и "3" - для всех других.
Процесс, описанный относительно фиг. 2 и 3, позволяет проводить различие между каждым из различных режимов, перечисленных в Таблице 1. В зависимости от того, как различные значения жесткости присвоены различным режимам, могут быть пары режимов, между которыми нет необходимости проводить различие. В этом случае, специалист в данной области техники легко узнает, какие из этапов способа на фиг. 2 и 3 могут быть отброшены.
Согласно предпочтительному варианту осуществления контроллер 8 использует индексы, полученные в процессе на фиг. 2 и 3 также для управления сцеплением 7. В то время как сцепление 7 разомкнуто в крейсерском режиме, оно может быть замкнуто в режиме движения в повороте, чтобы уменьшить чрезмерную или недостаточную поворачиваемость транспортного средства. Степень замыкания и, следовательно, коэффициент распределения крутящего момента двигателя на передние и задние колеса 15, 16 может быть разным для режимов движения в повороте, ускорения при движении в повороте и торможения при движении в повороте. Кроме того, сцепление 7 может быть замкнуто в режиме ускорения по прямой, чтобы предотвратить буксование шин в случае высокого ускорения.
Автомобиль с а-стойкой
Конструкция передней части автомобиля
Оптимизированное охлаждение масла для двигателя внутреннего сгорания
Семискоростная трансмиссия с двойным сцеплением
Кузов автомобиля
Кузов автомобиля
Получение наноразмерных платино-титановых сплавов
Энергопоглощающий элемент и использующий его кузов автомобиля
Консоль для автомобиля
Ступенчатая коробка передач
Способ эксплуатации системы дизельного двигателя и управляющее устройство
Устройство и способ защиты компрессора и охладителя воздуха турбонаддува в двигателе внутреннего сгорания, двигатель внутреннего сгорания и устройство управления
Способ диагностирования каталитического устройства системы дополнительной обработки выхлопных газов двигателя
Способ управления процессом переключения автоматической коробки передач
Система зарядки аккумуляторной батареи для гибридных транспортных средств
Способ и контроллер для управления давлением в системе подачи топлива, а также машиночитаемый носитель
Способ управления устройством сцепления и электронно-управляемое фрикционное сцепление

