Результат интеллектуальной деятельности: СПОСОБ ДИСТАНЦИОННОГО ОБСЛЕДОВАНИЯ ОБЪЕКТОВ ЭЛЕКТРИЧЕСКИХ СЕТЕЙ
Вид РИД
Изобретение
Предлагаемое изобретение относится к области применения технологий спутниковой радионавигации для решения задач дистанционной диагностики и определения координат мест локальных повреждений объектов электрических сетей на основе съемки местности при помощи тепловизионных приемников. Изобретение может быть использовано при диагностических работах на электрических сетях без вывода их из эксплуатации.
Известен способ [1], по которому определяют координаты и пространственную ориентацию надводной подвижной станции, выполняют зондирование дна акватории акустическими сигналами и определяют координаты подводных объектов по их изображениям.
Недостатком способа является отсутствие возможности диагностики мест локальных перегревов объектов электрических сетей, кроме того, данный способ предусматривает идентификацию и определение координат одного объекта, в то время как для решения задач автоматизированной диагностики требуется получение изображений объекта диагностики с возможностью определения координат любых точек, для чего на изображении должны быть как минимум три точки с известными координатами.
Известен способ [2], основанный на аэротермографической съемке проводов воздушных линий (ВЛ) электропередач с борта вертолета и включающий съемку ВЛ с помощью тепловизора, измерение координат вертолета, выявление мест локальных перегревов ВЛ и фиксирование соответствующих координат вертолета в протоколе диагностического полета.
Недостатками данного способа являются: низкая оперативность и большая трудоемкость, обусловленные необходимостью участия нескольких специалистов одновременно в не автоматизированном процессе диагностики; низкая точность определения координат мест выявленных аварийных и предаварийных состояний энергетических объектов. Кроме того, данный способ не позволяет формировать и вести единую базу данных, отражающую эволюцию диагностируемого оборудования в разрезе повторных диагностик с точностью, позволяющей идентифицировать каждый объект ВЛ в отдельности.
Известен способ дистанционного обследования объектов электрических сетей с помощью тепловидеосъемочного устройства [3], взятый в качестве прототипа, по которому с летательного аппарата (ЛА) выполняют съемку линии электропередачи с помощью тепловизора, сопряженного с приемником сигналов спутниковых радионавигационных систем и системой измерения ориентации ЛА, результаты съемки, представленные в виде серии тепловизионных изображений передают, сохраняют и подвергают обработке в программно-аппаратном комплексе.
Недостатком известного способа является невозможность его использования в реальном времени. Известный способ включает в себя вычислительно емкие процедуры, осуществляемые в постобработке: геометрическое трансформирование и корреляционно-экстремальный анализ тепловизионных изображений, поиск точек с известными с геодезической точностью координатами на тепловизионных изображениях.
В основу изобретения положена задача определения в реальном времени координат тепловизионных изображений диагностируемых объектов электрических сетей в дистанционном режиме, без использования операций: геометрического трансформирования и корреляционно-экстремального анализа тепловизионных изображений, поиска точек с известными с геодезической точностью координатами на тепловизионных изображениях.
Поставленная задача решается тем, что в способе дистанционного обследования объектов электрических сетей, по которому с летательного аппарата выполняют съемку электрических сетей с помощью тепловизора, сопряженного с приемником сигналов спутниковых радионавигационных систем и с системой измерения ориентации летательного аппарата, результаты съемки, представленные в виде серии тепловизионных изображений, передают в программно-аппаратный комплекс, согласно изобретению, одновременно с получением тепловизионного изображения выполняют измерение высоты полета летательного аппарата высотомером, рассчитывают точные координаты летательного аппарата в дифференциальном режиме спутниковой радионавигационной системы, рассчитывают направляющие косинусы векторов от точек центра и углов тепловизионного изображения до центра объектива камеры тепловизора в связанной с летательным аппаратом системе координат на основе значений углов обзора камеры тепловизора, определяют направляющие косинусы этих векторов в топоцентрической системе координат на основе измеренных углов пространственной ориентации летательного аппарата и матрицы поворота, выраженной через углы Эйлера, рассчитывают расстояния от точек тепловизионного изображения до центра объектива камеры тепловизора на основе информации о высоте расположения диагностируемого объекта над землей, высоте летательного аппарата, измеренной высотомером, и ранее найденных значений направляющих косинусов в связанной с летательным аппаратом системе координат, определяют топоцентрические координаты точек центра и углов тепловизионного изображения на основе рассчитанных направляющих косинусов векторов от точек тепловизионного изображения до центра объектива камеры тепловизора в топоцентрической системе координат и расстояний от точек тепловизионного изображения до центра объектива камеры тепловизора и определяют географические координаты центра и углов тепловизионного изображения в соответствии с выражениями:
 ,
,
Bj, Lj, Hj - широта, долгота и высота j-й точки тепловизионного изображения;
lat, lon, h - широта, долгота, высота летательного аппарата;
Rlat и Rlon - радиусы кривизны меридионального и нормального сечений эллипсоида Земли;
 ,
,  ,
,  - найденные топоцентрические координаты j-й точки тепловизионного изображения.
- найденные топоцентрические координаты j-й точки тепловизионного изображения.
Заявляемый способ дистанционного обследования объектов электрических сетей поясняется прилагаемыми чертежами, в которых на
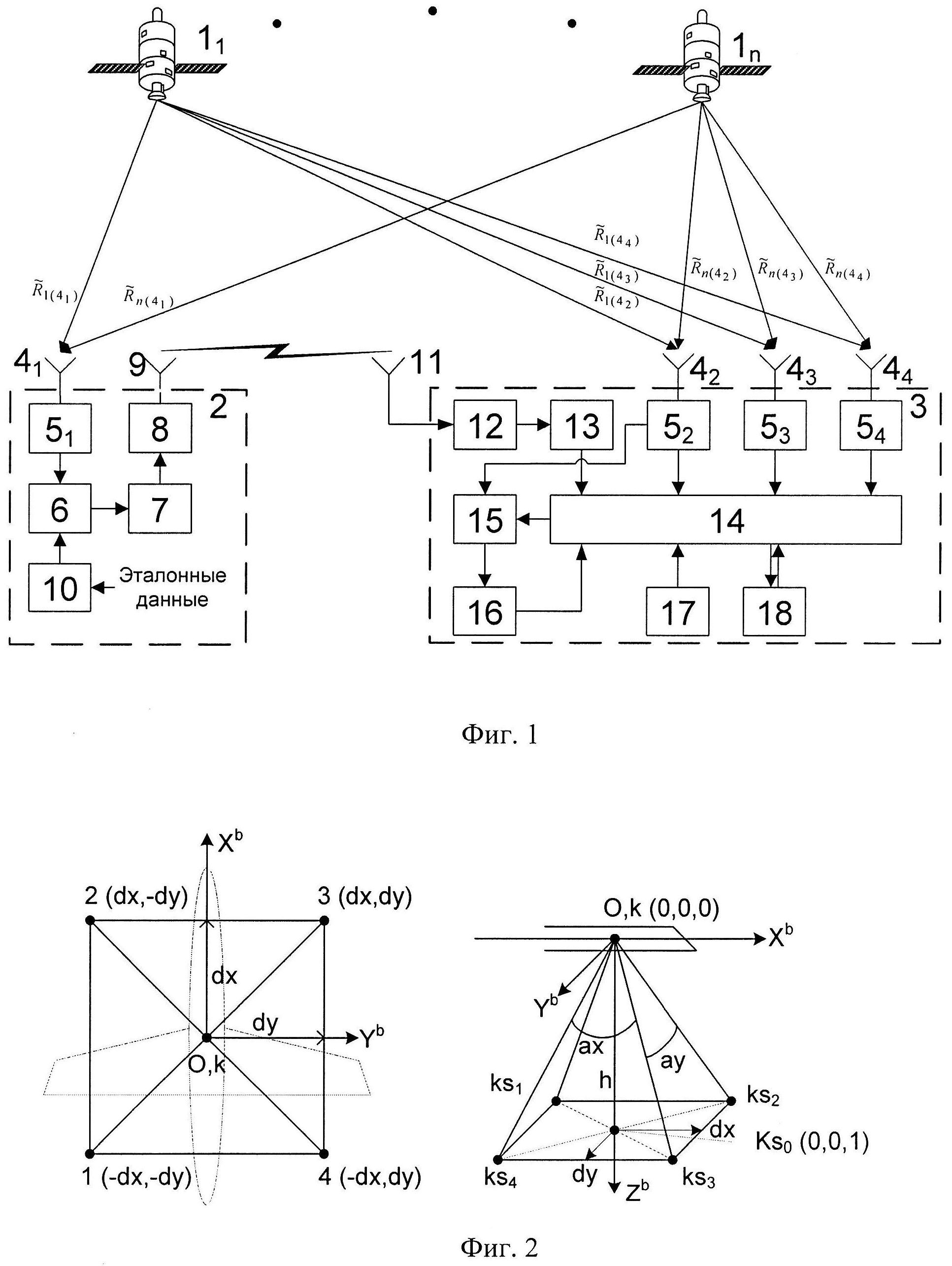
фиг.1 изображена структурная схема возможного устройства дистанционного обследования объектов электрических сетей для реализации предложенного способа; на фиг.2 изображена связанная с летательным аппаратом система координат; на
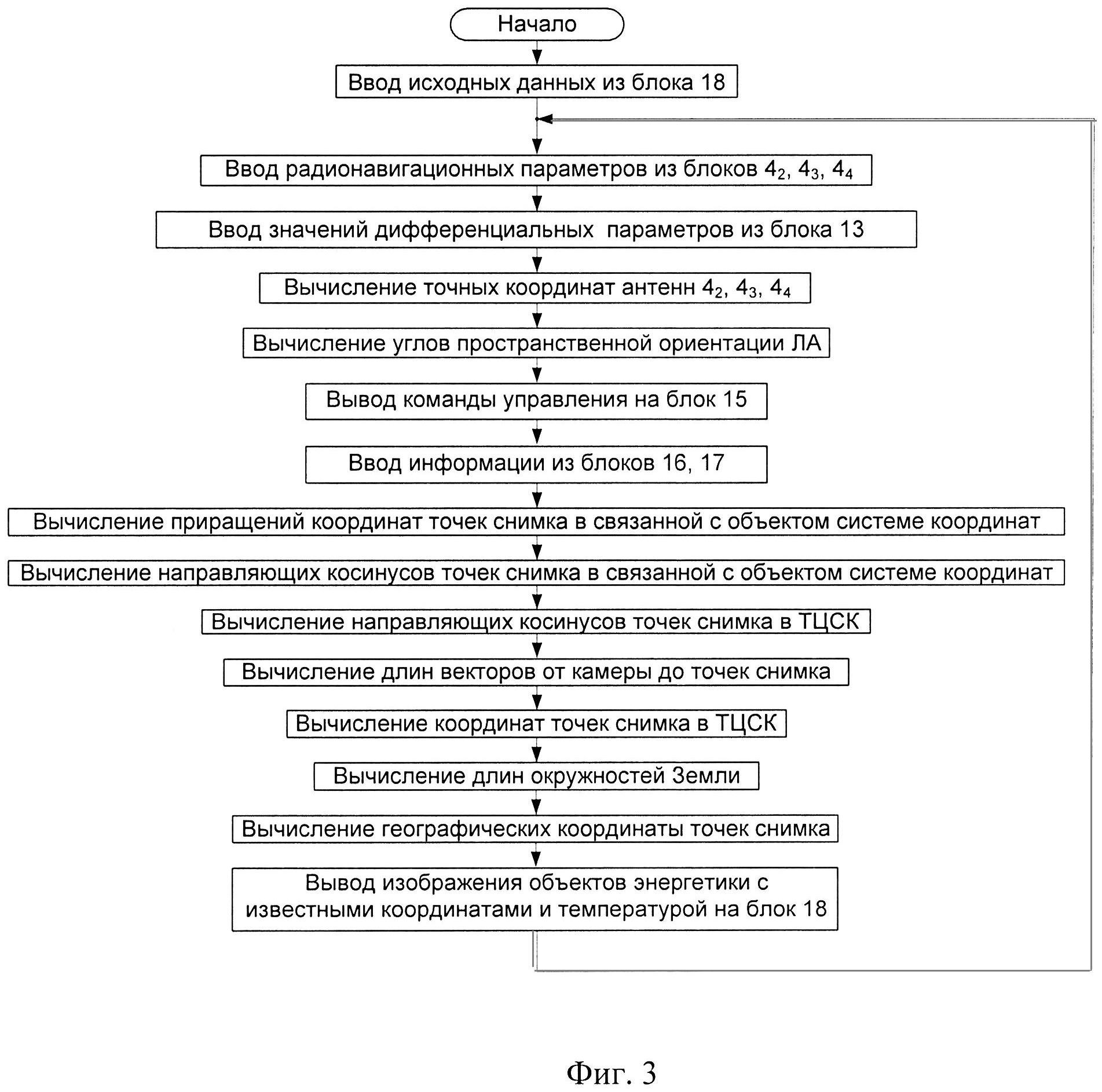
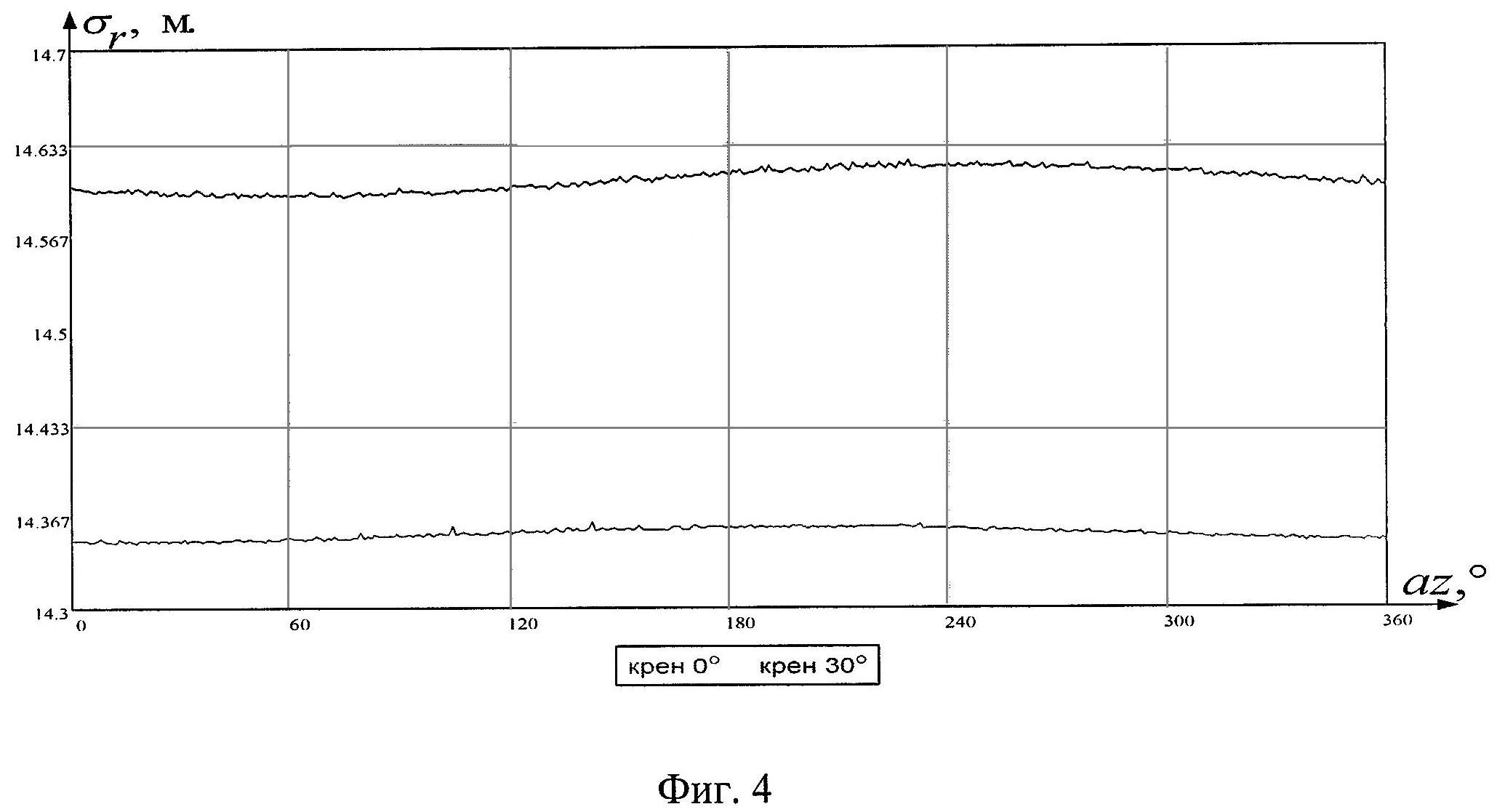
фиг.3 изображена блок-схема алгоритма работы вычислительного блока, реализующего алгоритм дистанционного обследования объектов электрических сетей в соответствии с предлагаемым способом; на фиг.4 приведена зависимость погрешностей определения координат точки тепловизионного изображения от углов азимута и крена ЛА, полученная в результате статистического моделирования предлагаемого способа.
Устройство дистанционного обследования объектов электрических сетей содержит n навигационных спутников 11, …, 1n, контрольно-корректирующую станцию 2 и диагностическую станцию 3. Контрольно-корректирующая станция 2 включает в себя последовательно соединенные первую приемную антенну 41 спутниковых сигналов, первый приемник 51 спутниковых сигналов, вычислитель поправок 6, модулятор 7, передатчик 8 корректирующей информации и передающую антенну 9 корректирующей информации, а также вычислитель 10 эталонных значений радионавигационных параметров, выходом соединенный со вторым входом вычислителя поправок 6. Диагностическая станция 3 содержит последовательно соединенные приемную антенну 11 корректирующей информации, приемник 12 корректирующей информации и демодулятор 13, подключенный к соответствующему входу вычислительного блока 14. Диагностическая станция 3 также включает последовательно соединенные вторую антенну 42 спутниковых сигналов и второй приемник 52 спутниковых сигналов, последовательно соединенные третью антенну 43 спутниковых сигналов и третий приемник 53 спутниковых сигналов, последовательно соединенные четвертую антенну 44 спутниковых сигналов и четвертый приемник 54 спутниковых сигналов. При этом выход каждого из указанных приемников спутниковых сигналов 52, 53 и 54 подключен к соответствующему входу вычислительного блока 14, своим выходом соединенного с одним из входов формирователя 15 синхронизирующих сигналов, второй вход которого подключен ко второму выходу второго приемника 52 спутниковых сигналов, а выход соединен с входом тепловизора 16, выход которого соединен с соответствующим входом вычислительного блока 14. К вычислительному блоку 14 также подключены блок высотомера 17 и блок управления и индикации 18.
Предлагаемый способ дистанционного обследования объектов электрических сетей можно осуществить следующим образом.
Наземная контрольно-корректирующая станция 2 первой приемной антенной 41 спутниковых сигналов принимает сигналы навигационных спутников 11, …, 1n и определяет радионавигационные параметры  по каждому из спутников. С первого приемника 51 спутниковых сигналов эти значения радионавигационных параметров
по каждому из спутников. С первого приемника 51 спутниковых сигналов эти значения радионавигационных параметров  поступают на вход вычислителя поправок 6, второй вход которого соединен с вычислителем 10 эталонных значений радионавигационных параметров, определяющим эталонные значения радионавигационных параметров
поступают на вход вычислителя поправок 6, второй вход которого соединен с вычислителем 10 эталонных значений радионавигационных параметров, определяющим эталонные значения радионавигационных параметров  на основе эталонных координат фазового центра первой приемной антенны 41 ХКСЭ, YКСЭ, ZКСЭ и эфемерид Xэф1-Xэфn, Yэф1-Yэфn, Zэф1-Zэфn каждого из навигационных спутников. Вычислитель поправок 6 вырабатывает значения поправок радионавигационных параметров по каждому из спутников одним из известных методов, например в соответствии с [5]:
на основе эталонных координат фазового центра первой приемной антенны 41 ХКСЭ, YКСЭ, ZКСЭ и эфемерид Xэф1-Xэфn, Yэф1-Yэфn, Zэф1-Zэфn каждого из навигационных спутников. Вычислитель поправок 6 вырабатывает значения поправок радионавигационных параметров по каждому из спутников одним из известных методов, например в соответствии с [5]:
 , где i - номер навигационного спутника.
, где i - номер навигационного спутника.
С выхода вычислителя поправок 6 сигналы, в которых содержится информация о номере спутника, времени приема навигационного сигнала, поправках к радионавигационным параметрам до каждого спутника ΔR1-ΔRn, поступают на модулятор 7. С выхода модулятора 7 сигналы поступают в передатчик 8 корректирующей информации, где преобразуются, усиливаются и излучаются в пространство передающей антенной 9 корректирующей информации.
Диагностическая станция 3, находящаяся на борту ЛА, приемной антенной 11 корректирующей информации принимает сигналы контрольно-корректирующей станции 2. Эти сигналы поступают на вход приемника 12 корректирующей информации, в котором происходит усиление, преобразование и выделение сигналов контрольно-корректирующей станции 2. С выхода приемника 12 корректирующей информации эти сигналы поступают на вход демодулятора 13, выделяющего из сигналов информацию о номере спутника, времени приема сигнала и поправках радионавигационных параметров ΔR1-ΔRn, сформированных вычислителем поправок 6 контрольно-корректирующей станции 2. С выхода демодулятора 13 эта информация поступает в вычислительный блок 14.
Одновременно сигналы навигационных спутников 11, …, 1n принимаются второй 42, третьей 43 и четвертой 44 приемными антеннами спутниковых сигналов. Второй 52, третий 53 и четвертый 54 приемники спутниковых сигналов производят определение радионавигационных параметров  ,
,  и
и  - c выхода второго 52, третьего 53 и четвертого 54 приемников спутниковых сигналов информация о номерах спутников, времени приема сигналов и значениях радионавигационных параметров
- c выхода второго 52, третьего 53 и четвертого 54 приемников спутниковых сигналов информация о номерах спутников, времени приема сигналов и значениях радионавигационных параметров  ,
,  и
и  поступает в вычислительный блок 14, который выполняет коррекцию радионавигационных параметров
поступает в вычислительный блок 14, который выполняет коррекцию радионавигационных параметров  ,
,  и
и  , измеренных вторым 52, третьим 53 и четвертым 54 приемниками спутниковых сигналов, одним из известных методов, например в соответствии с [5]:
, измеренных вторым 52, третьим 53 и четвертым 54 приемниками спутниковых сигналов, одним из известных методов, например в соответствии с [5]:
 ,
,  ,
,  .
.
В результате этой коррекции получают точные значения радионавигационных параметров  ,
,  и
и  , которые используют для вычисления точных координат второй 42, третьей 43 и четвертой 44 приемных антенн спутниковых сигналов по одному из известных алгоритмов, приведенных, например в [5].
, которые используют для вычисления точных координат второй 42, третьей 43 и четвертой 44 приемных антенн спутниковых сигналов по одному из известных алгоритмов, приведенных, например в [5].
Приемные антенны 42, 43 и 44 спутниковых сигналов располагаются на диагностическом ЛА, что позволяет определить угол kr поворота вокруг оси OXb - крен, угол места um поворота вокруг оси OYb - дифферент, угол азимута az поворота вокруг оси OZb - дирекционный угол по разностям радионавигационных параметров  и
и  , например, по алгоритму, приведенному на стр.206-208 в [5].
, например, по алгоритму, приведенному на стр.206-208 в [5].
После вычислений точных координат и углов пространственной ориентации ЛА с вычислительного блока 14 выдается управляющий сигнал на формирователь синхронизирующих сигналов 15.
Со второго выхода второго приемника 52 спутниковых сигналов на вход формирователя 15 синхронизирующих сигналов поступает опорная частота, например 10 МГц, как предложено в [5], из которой формируются необходимые сигналы с частотами, обеспечивающими синхронизацию работы блока тепловизора 16 с вычислительным блоком 14. Блок тепловизора 16, выход которого связан с соответствующим входом вычислительного блока 14, используется для диагностики объектов электрических сетей.
С выхода блока высотомера 17 информация о текущей высоте полета ЛА над землей dh поступает на вход вычислительного блока 14. Затем, исходя из полученных координат приемной антенны 42 спутниковых сигналов, углов азимута, места и крена ЛА, высоты полета ЛА над землей dh с использованием заданных углов обзора камеры тепловизора ax и ay, осуществляется вычисление координат точек центра и углов тепловизионного изображения.
Для выполнения указанных вычислений может быть использована связанная с ЛА прямоугольная система координат (СК), приведенная на фиг.2. Начало данной СК соответствует центру объектива камеры тепловизора, а ее оси образуют правую систему координат (ось OXb направлена по продольной оси ЛА вперед, ось OYb направлена вправо, ось OZb направлена вертикально вниз).
Исходя из этого, центр объектива камеры тепловизора находится в точке O (фиг.2) с координатами (0, 0, 0). Кроме того, в дальнейших расчетах полагается, что поле зрения камеры тепловизора представляет собой прямоугольник, стороны которого параллельны осям OXb и OYb системы координат, связанной с ЛА, а камера тепловизора сориентирована так, что ее оптическая ось совпадает с направлением оси OZb данной СК. В этом случае центр поля зрения камеры тепловизора будет иметь координаты (0, 0, h). Величины приращений координат dx и dy, показанные на фиг.2, принимают следующие значения:

ax, ay - углы обзора камеры тепловизора в направлении продольной и поперечной осей его объектива, соответственно, в связанной с ЛА системе координат;
h - высота полета ЛА.
Тогда для пяти векторов от центра объектива камеры тепловизора до точек, принадлежащих центру, левому нижнему, левому верхнему, правому верхнему и правому нижнему углам тепловизионного изображения, соответственно, могут быть найдены значения направляющих косинусов ks0, …, ks4 в СК, связанной с ЛА:
 ,
,
dx и dy - приращения (2) координат точек центра и углов тепловизионного изображения в СК, связанной с ЛА.
Для дальнейших вычислений может быть использована топоцентрическая СК, представляющая собой трехмерную прямоугольную СК с центром, находящимся в точке расположения центра объектива камеры тепловизора. Оси данной СК направлены следующим образом: ось OXn направлена на Север, ось OYn - на Восток, ось OZn - вниз, к центру масс Земли.
Переход от направляющих косинусов точек центра и углов тепловизионного изображения ks0, …, ks4 (3) в СК, связанной с ЛА, и углов азимута az, места um и крена kr ЛА к направляющим косинусам kn0, …, kn4 в топоцентрической СК осуществим в соответствии с выражениями [4]:

С - матрица поворота [4], выраженная через углы Эйлера:
При выполнении дальнейших расчетов, в целях упрощения, поверхность Земли, находящаяся в поле зрения камеры тепловизора полагается плоской.
Исходя из этого, расстояния r0, …, r4 от точек центра и углов тепловизионного изображения до центра объектива камеры тепловизора как частное высоты dh и z - составляющей каждого из направляющих косинусов определяются как:

Тогда координаты точек тепловизионного изображения xn0, …, xn4 в плоскости пересечения с Землей в топоцентрической СК представляют собой произведение расстояний r0, …, r4 на соответствующие значения направляющих косинусов:

Пересчет полученных топоцентрических координат (7) точек тепловизионного изображения в географические координаты осуществляется на основе соотношений [4]:

lat, lon, h - широта, долгота, высота ЛА;
Rlat и Rlon - радиусы кривизны меридионального и нормального сечений эллипсоида Земли.
Значения Rlat и Rlon определяются как [4]:

R0 - экваториальный радиус Земли;
e2=2s-s2 - квадрат эксцентриситета эллипсоида Земли;
s - геометрическое сжатие эллипсоида Земли.
Значения координат точек центра и углов тепловизионного изображения, вычисленные в соответствии с (8), а также само тепловизионное изображение, введенное из блока тепловизора 16 поступают в блок управления и индикации 18 для последующего отображения.
Вычислительный блок 14 выполняет циклическую обработку вводимой информации в соответствии с блок-схемой алгоритма, приведенной на фиг.3.
Вычислительный блок 14 можно реализовать на основе современных быстродействующих микропроцессоров семейства Intel по типовой структуре, описанной, например на стр.48 в [6].
Техническим результатом заявляемого способа является получение электронных тепловизионных изображений объектов электрических сетей, имеющих координатную привязку. Получение координатно привязанных тепловизионных изображений осуществляется в реальном времени в процессе облета объектов электрических сетей летательными аппаратами. Определение координат мест повреждений осуществляется на основе координат точек тепловизионных изображений с повышенной температурой.
Рассмотрим конкретный пример.
Пусть камера тепловизора находится в точке с координатами lat=56°0' Северной широты и lon=92°0' Восточной долготы на высоте h=400 м над заданным эллипсоидом, например, WGS-84. Параметры угловой ориентации ЛА: угол азимута az=-150°; угол места um=-10°; угол крена kr=-15°. Углы обзора камеры тепловизора: ax=29°; ay=22°. Высота ЛА над землей, определяемая при помощи высотомера, составляет dh=100 м.
В результате моделирования получены:
1. Значения направляющих косинусов (3) векторов от центра объектива камеры тепловизора до точек центра и углов тепловизионного изображения в связанной с ЛА системе координат, приведенные в таблице 1.
|
2. Значения направляющих косинусов (4) векторов в топоцентрической СК, приведенные в таблице 2.
|
3. Значения расстояний (6) от точек центра и углов тепловизионного изображения до центра объектива камеры тепловизора, приведенные в таблице 3.
|
4. Значения топоцентрических координат (7) точек центра и углов тепловизионного изображения, приведенные в таблице 4.
|
5. Значения географических координат точек центра и углов тепловизионного изображения (8), приведенные в таблице 5.
|
Приведенные результаты расчетов подтверждают возможность определения координат точек центра и углов тепловизионного изображения на основании измеренных значений координат, угловой ориентации и высоты полета ЛА над Землей.
Для оценки погрешностей определения координат точек центра и углов тепловизионного изображения был использован метод статистического моделирования по результатам обработки 200 независимых испытаний для каждой точки.
Кроме того, путем статистического моделирования произведен расчет зависимости среднеквадратического отклонения (СКО) погрешности определения координат точки правого нижнего угла тепловизионного изображения σr от угла азимута ЛА, для следующих значений угла крена ЛА kr=0°, 30°, в соответствии с выражением:

σX, σY, σZ - СКО определения прямоугольных топоцентрических координат точки правого нижнего угла тепловизионного изображения.
Расчет произведен для следующих исходных данных:
- σdh=10 м - СКО погрешности определения высоты ЛА над землей при помощи высотомера;
- σlat=0,032", σlon=0,058" - СКО погрешности определения географических координат ЛА при помощи приемника спутниковых сигналов (указанные значения σlat и σlon соответствуют СКО погрешности σ=1 м определения координат ЛА в горизонтальной плоскости);
- σh=10 м - СКО погрешности определения высоты ЛА при помощи приемника спутниковых сигналов;
- σaz=10', σum=20', σkr=20' - среднеквадратические погрешности определения азимута, угла места и крена ЛА;
- z=200 - число статистических испытаний в каждом заданном значении азимута ЛА.
Зависимости СКО погрешности определения координат точки правого нижнего угла тепловизионного изображения σr (10) от азимута ЛА в диапазоне 0°-360° для двух значений крена ЛА 0° и 30° приведены на фиг.4. Полученные результаты показывают, что погрешность определения координат данной точки тепловизионного изображения не превышают 15 м.
Аналогичные результаты получены для остальных точек тепловизионного изображения.
Полученная погрешность определения координат мест локальных повреждений объектов электрических сетей является достаточной для локализации повреждений и осуществления качественной диагностики.
Таким образом, предлагаемый способ дистанционного обследования объектов электрических сетей, в отличие от известного способа, обеспечивает определение в реальном времени координат тепловизионных изображений диагностируемых объектов электрических сетей в дистанционном режиме.
Литература
1. Пат. 2381518 Российская Федерация. Устройство для определения координат подводных объектов / Валиханов М.М., Алешечкин A.M., Кокорин В.И. // Опубл. 2010, Бюл. №4.
2. РД 153-34.0-20.363-99. Методики инфракрасной диагностики электрооборудования и ВЛ., 2000.
3. Пат.2258204 Российская Федерация. Способ дистанционного обследования объектов энергетических сетей с помощью тепловидеосъемочного устройства / Кузнецов А.Е., Калюжный В.И., Ковалев А.О., Ефремов И.Ф., Гектин Ю.М. // Опубл. 10.08.2005, Бюл. №22.
4. Groves, P. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems [Текст] / P.D.Groves. - Boston, London.: Artech House, 2008. - 507 c.
5. Шебшаевич B.C. Сетевые спутниковые радионавигационные системы / B.C. Шебшаевич, П.П. Дмитриев, Н.В. Иванцевич; Под ред. B.C.Шебшаевича. - М.: Радио и связь. 1993.
6. Микропроцессоры Intel: 8086/8088, 80186/80188, 80286, 80386, 80486, Pentium, Pentium Pro Processor, Pentium II, Pentium III, Pentium 4. Архитектура, программирование и интерфейсы. Шестое издание: Пер. с англ. - СПб.: БХВ-Петербург, 2005, 1328 с: ил.
7. Правила устройства электроустановок ПУЭ, 7-е изд. Глава 2.5.
Способ дистанционного обследования объектов электрических сетей, по которому с летательного аппарата выполняют съемку электрических сетей с помощью тепловизора, сопряженного с приемником сигналов спутниковых радионавигационных систем и с системой измерения ориентации летательного аппарата, результаты съемки, представленные в виде серии тепловизионных изображений, передают в программно-аппаратный комплекс, отличающийся тем, что одновременно с получением тепловизионного изображения выполняют измерение высоты полета летательного аппарата высотомером, рассчитывают точные координаты летательного аппарата в дифференциальном режиме спутниковой радионавигационной системы, рассчитывают направляющие косинусы векторов от точек центра и углов тепловизионного изображения до центра объектива камеры тепловизора в связанной с летательным аппаратом системе координат на основе значений углов обзора камеры тепловизора, определяют направляющие косинусы этих векторов в топоцентрической системе координат на основе измеренных углов пространственной ориентации летательного аппарата и матрицы поворота, выраженной через углы Эйлера, рассчитывают расстояния от точек тепловизионного изображения до центра объектива камеры тепловизора на основе информации о высоте расположения диагностируемого объекта над землей, высоте летательного аппарата, измеренной высотомером, и ранее найденных значений направляющих косинусов в связанной с летательным аппаратом системе координат, определяют топоцентрические координаты точек центра и углов тепловизионного изображения на основе рассчитанных направляющих косинусов векторов от точек тепловизионного изображения до центра объектива камеры тепловизора в топоцентрической системе координат и расстояний от точек тепловизионного изображения до центра объектива камеры тепловизора и определяют географические координаты центра и углов тепловизионного изображения в соответствии с выражениями: где B, L, H - широта, долгота и высота j-й точки тепловизионного изображения;lat, lon, h - широта, долгота, высота летательного аппарата;Rlat и Rlon - радиусы кривизны меридионального и нормального сечений эллипсоида Земли; , , - найденные топоцентрические координаты j-й точки тепловизионного изображения.



Способ получения слитка из сплавов цветных металлов
Способ получения полимерного нанокомпозиционного материала
Стенд для испытания зубчатых передач по замкнутому силовому контуру
Способ производства хлебобулочных изделий из замороженных полуфабрикатов
Электроразведочное устройство
Способ производства хлебобулочных изделий из полувыпеченных замороженных полуфабрикатов
Способ геоэлектроразведки и устройство для его осуществления
Способ определения термоокислительной стабильности смазочных материалов
Устройство для фокусировки типа "линза люнеберга"
Грузоподъемный механизм
Устройство для бестраншейной замены подземных трубопроводов
Устройство для бестраншейной замены подземных трубопроводов
Способ получения слитка из сплавов цветных металлов
Способ получения полимерного нанокомпозиционного материала
Стенд для испытания зубчатых передач по замкнутому силовому контуру
Способ производства хлебобулочных изделий из замороженных полуфабрикатов
Электроразведочное устройство
Способ производства хлебобулочных изделий из полувыпеченных замороженных полуфабрикатов
Способ геоэлектроразведки и устройство для его осуществления
Сырьевая смесь для изготовления керамических теплоизоляционных строительных материалов

