Результат интеллектуальной деятельности: СПОСОБ И МОДУЛЬ ДЛЯ ОПРЕДЕЛЕНИЯ ОПОРНЫХ ЗНАЧЕНИЙ СКОРОСТИ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ
Вид РИД
Изобретение
Область техники
Настоящее изобретение относится к способу и модулю для определения заданных значений скорости в соответствии с ограничительной частью независимых пунктов формулы изобретения.
Уровень техники
Многие транспортные средства в настоящее время оборудованы устройством автоматического поддержания скорости для облегчения управления транспортным средством. Желаемая скорость может быть задана водителем, например, при помощи устройства управления в консоли рулевого колеса, и система автоматического поддержания скорости транспортного средства после этого воздействует на систему управления таким образом, чтобы она ускоряла и затормаживала транспортное средство для поддержания необходимой скорости. Если транспортное средство оборудовано автоматической системой переключения передач, передачи транспортного средства переключаются таким образом, чтобы транспортное средство могло сохранять желаемую скорость.
Когда устройство автоматического поддержания скорости используется на холмистой местности, система автоматического поддержания скорости будет стремиться сохранить заданную скорость на подъемах. Это приводит, среди прочего, к ускорению транспортного средства на вершине холма и, возможно, при последующем спуске, вызывая необходимость торможения для исключения превышения заданной скорости, что является неэкономичным по топливу режимом эксплуатации транспортного средства.
Благодаря изменению скорости транспортного средства на холмистой местности можно экономить топливо по сравнению с обычным устройством автоматического поддержания скорости. Это может быть сделано различными способами, например, посредством вычислений текущего состояния транспортного средства (как с устройством Scania Ecocruise®). Если подъем вычислен, система тогда ускоряет транспортное средство на подъеме. К концу подъема система запрограммирована для исключения ускорения, пока градиент не выровняется наверху, при условии, что скорость транспортного средства не падает ниже определенного уровня. Снижение скорости в конце подъема позволяет восстановить скорость на последующем спуске без использования двигателя для ускорения. Когда транспортное средство приближается к основанию уклона, система пытается использовать кинетическую энергию для начала следующего подъема с более высокой скоростью, чем с обычным устройством автоматического поддержания скорости. Система будет легко обеспечивать ускорение в конце спуска, чтобы сохранить количество движения транспортного средства. На холмистой местности это означает, что транспортное средство начинает следующий подъем с более высокой скоростью, чем нормальная. Исключение ненужного ускорения и использование кинетической энергии транспортного средства позволяют экономить топливо.
Устройства автоматического поддержания скорости движения обычно не приспособлены для адаптации скорости транспортного средства, чтобы учитывать, например, ограничения скорости или объездные пути и перекрестки впереди. Это означает, что даже если они пытаются управлять скоростью транспортного средства для управления в экономичном режиме, изменяя ее на холмистой местности и снижая ее для комфорта и безопасности на поворотах, водитель должен иногда самостоятельно прерывать их действие, например, поскольку допустимая скорость снижена дорожным знаком.
Если топология впереди известна транспортному средству, имеющему данные карты и системы глобального позиционирования, такая система может быть сделана более надежной и также может изменять скорость транспортного средства с упреждением.
В опубликованной заявке на патент США 2008/0221776 описана система для изменения установок электронного блока управления двигателем для оптимизации характеристик двигателя относительно расхода топлива в соответствии с сопутствующими обстоятельствами, такими как топография, дорожные характеристики и дорожные работы. Географическое положение транспортного средства определяет система глобального позиционирования.
Задачей настоящего изобретения является создание усовершенствованного устройства автоматического поддержания скорости, которое учитывает препятствия впереди и, таким образом, уменьшает расход топлива транспортным средством.
Сущность изобретения
Указанная выше задача решена посредством создания способа определения заданных значений vref скорости для систем управления транспортными средствами, включающего:
A) определение горизонта при помощи данных позиционирования и данных карты маршрута, составленного из участков маршрута, по меньшей мере, с одной характеристикой для каждого участка;
B) вычисление пороговых значений для указанной, по меньшей мере, одной характеристики участков в соответствии с одной или более значений, специфических для транспортного средства, причем пороговые значения служат граничными значениями для назначения участков в различные категории;
C) сравнение указанной, по меньшей мере, одной характеристики каждого участка с расчетными пороговыми значениями и помещение каждого участка в категорию в соответствии с результатами сравнений;
D) вычисление заданных значений vref скорости для систем управления транспортными средствами согласно горизонту в соответствии с правилами, относящимися к категориям, в которые помещены участки в пределах горизонта; причем
когда любая характеристика на участках в пределах горизонта указывает препятствие, осуществляются этапы:
E) вычисления замедления транспортного средства, предполагая, что тормоза не используются в соответствии с указанными правилами, имеющими отношение к категориям участка;
F) определения исходного положения в пределах горизонта для начала замедления транспортного средства в соответствии с его расчетным замедлением для достижения снижения заданной скорости vref до максимальной скорости, требуемой препятствием в местоположении препятствия;
G) адаптацию заданных значений vref скорости в пределах горизонта в соответствии с исходным положением и замедлением транспортного средства; и
H) регулирование скорости транспортного средства в соответствии с заданными значениями vref скорости.
Изобретение также относится к модулю для определения опорных значений vref скорости для систем управления транспортными средствами, причем модуль содержит блок горизонта, приспособленный для определения горизонта при помощи данных позиционирования и данных карты, составленного из участков, по меньшей мере, с одной характеристикой для каждого участка;
при этом модуль также содержит процессорный блок, приспособленный для:
- вычисления пороговых значений для указанной, по меньшей мере, одной характеристики участков в соответствии с одним или более значением, специфичным для транспортного средства, причем пороговые значения служат граничными значениями для назначения участков в различные категории;
- сравнения указанной, по меньшей мере, одной характеристики каждого участка с расчетными пороговыми значениями и помещения каждого участка в категории в соответствии с результатами сравнений;
- вычисления заданных значений vref скорости для систем управления транспортными средствами согласно горизонту в соответствии с правилами, относящимися к категориям, в которые помещены участки в пределах горизонта;
причем модуль также содержит блок препятствий, приспособленный для выполнения следующих этапов, когда любая характеристика на участках в пределах горизонта указывает на препятствие:
- вычисление замедления транспортного средства, предполагая, что тормоза не используются в соответствии с указанными правилами, относящимися к категориям участка; и
- определение исходного положения в пределах горизонта для начала замедления транспортного средства в соответствии с его расчетным замедлением, для достижения снижения заданной скорости vref до максимальной скорости, требуемой препятствием в местоположении препятствия;
при этом процессорный блок также приспособлен для адаптации опорных значений vref скорости в пределах горизонта в соответствии с указанным исходным положением и замедления транспортного средства; и система управления регулирует скорость транспортного средства в соответствии с заданными значениями vref скорости.
Если он снабжен данными о характере дороги, по которой будет двигаться транспортное средство, и расстоянии от транспортного средства до любых препятствий, например, ограничений скорости, объездных путей, акведуков, мостов, дорожных знаков, светофоров, дорожных работ, дорожных происшествий и т.д. в пределах горизонта впереди, модуль может определять заданные значения скорости или рекомендовать скорости транспортного средства для сокращения ненужных последовательностей увеличения скорости и следующего за ним торможения. Таким образом, достигается уменьшение расхода топлива, когда необходимость торможения перед изменениями скорости, перекрестками и т.д. посредством уменьшения скорости в назначенное время на основе прогнозируемых опорных значений vref скорости.
Сокращение использования тормозов уменьшает также износ тормозов и продлевает их срок службы.
Если транспортное средство оборудовано навигационной системой, маршрут транспортного средства может быть определен заранее. Для транспортного средства тогда требуется только прогноз заданных значений скорости для одного маршрута вместо многих предполагаемых маршрутов, и можно экономить нагрузку процессора, использование памяти и нагрузку контроллерной сети при следовании по маршруту, выбранному навигационной системой.
Предпочтительные варианты осуществления изобретения описаны в зависимых пунктах и в подробном описании.
Краткое описание чертежей
Изобретение описано ниже со ссылками на прилагаемые чертежи, на которых:
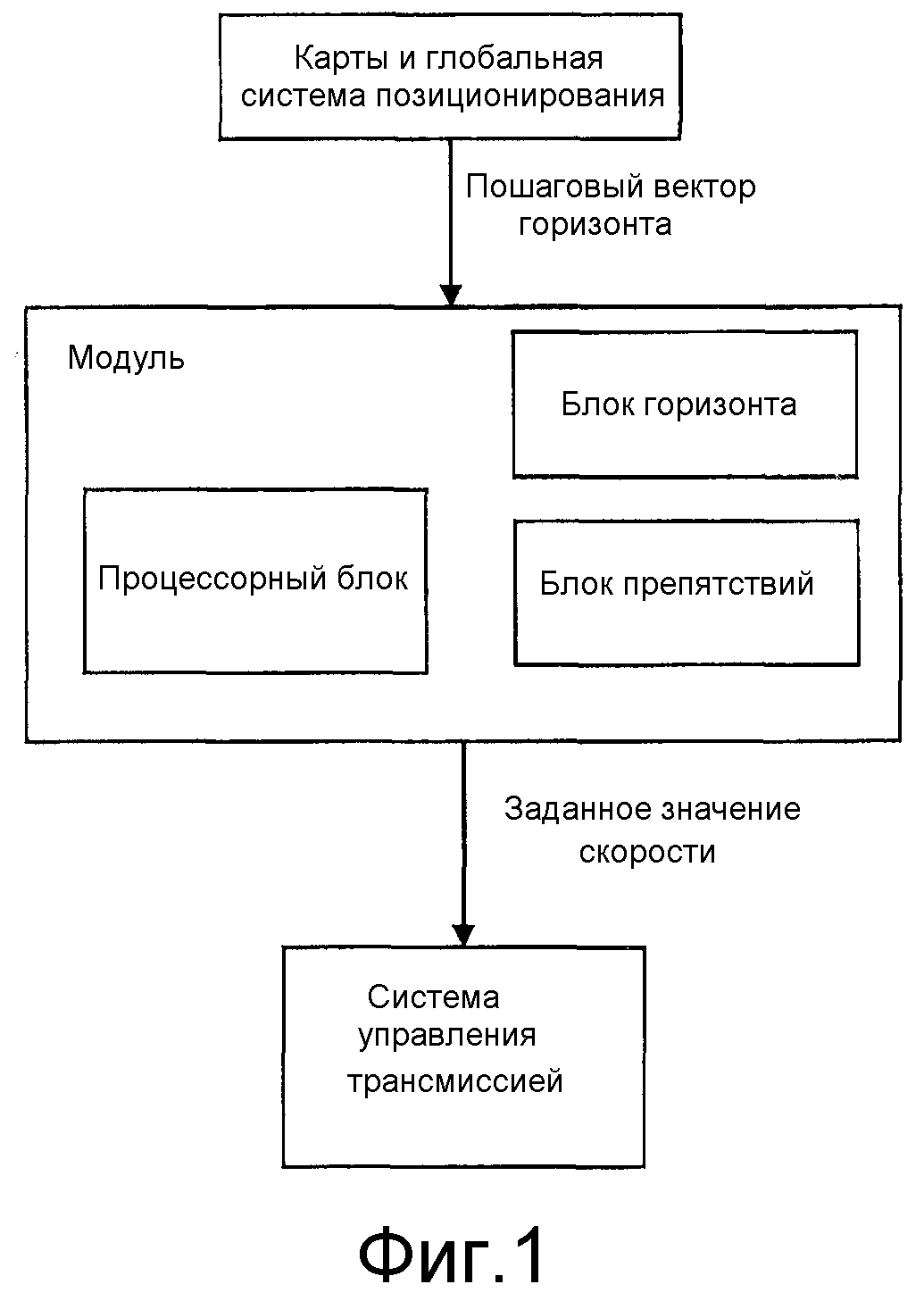
фиг. 1 - функциональный контекст модуля регулирования в транспортном средстве в соответствии с вариантом осуществления изобретения;
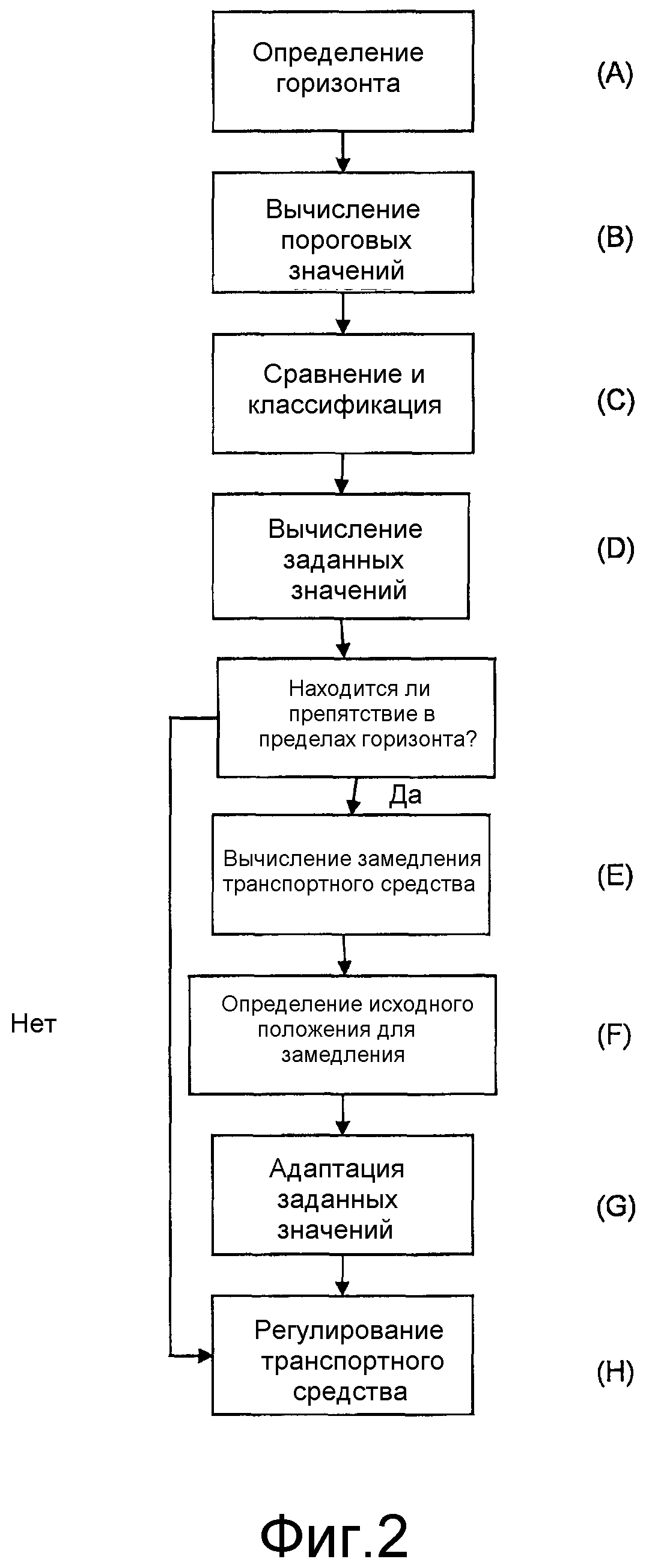
Фиг. 2 - блок-схема способа в соответствии с вариантом осуществления изобретения;
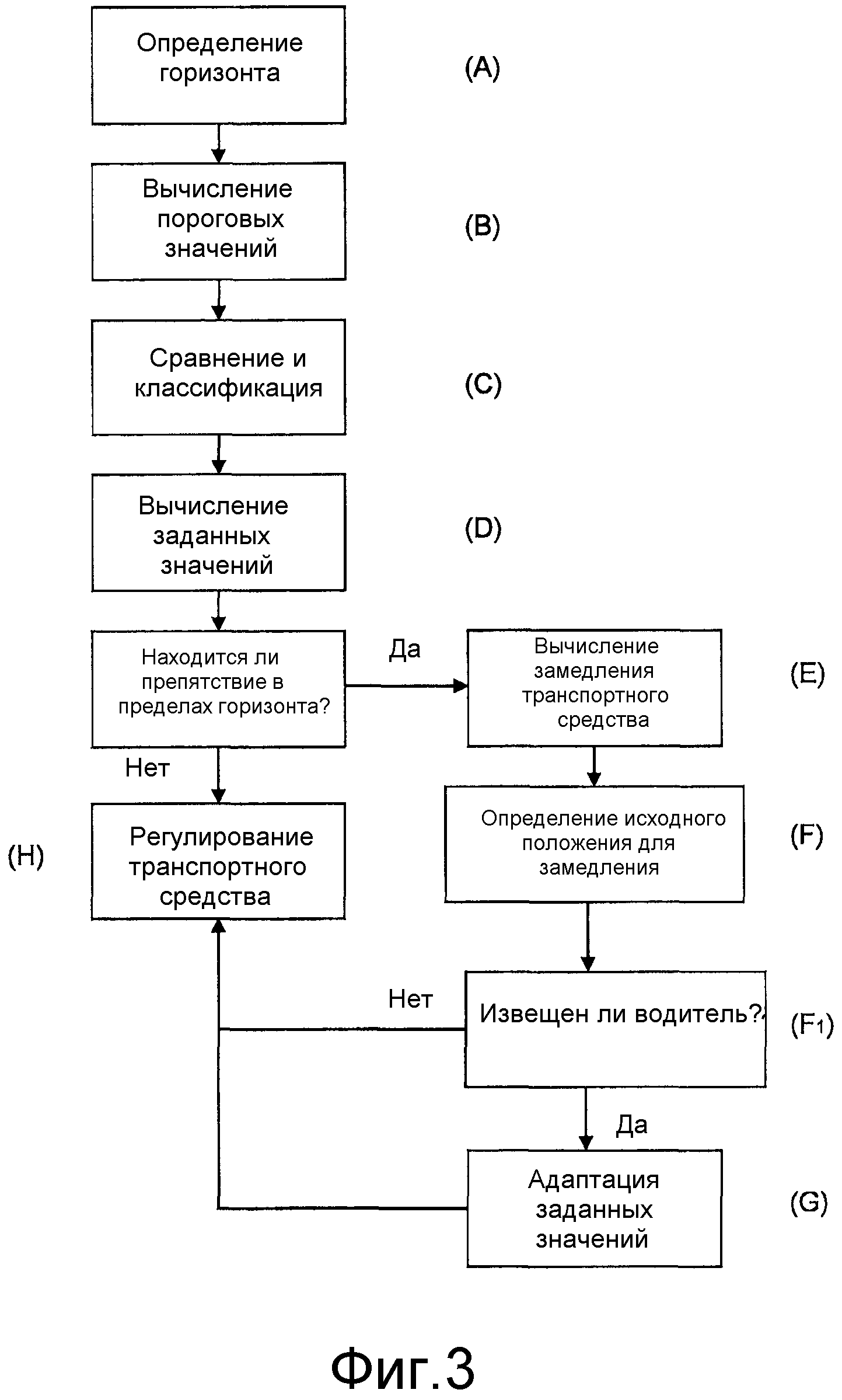
Фиг. 3 - блок-схема способа в соответствии с другим вариантом осуществления изобретения;
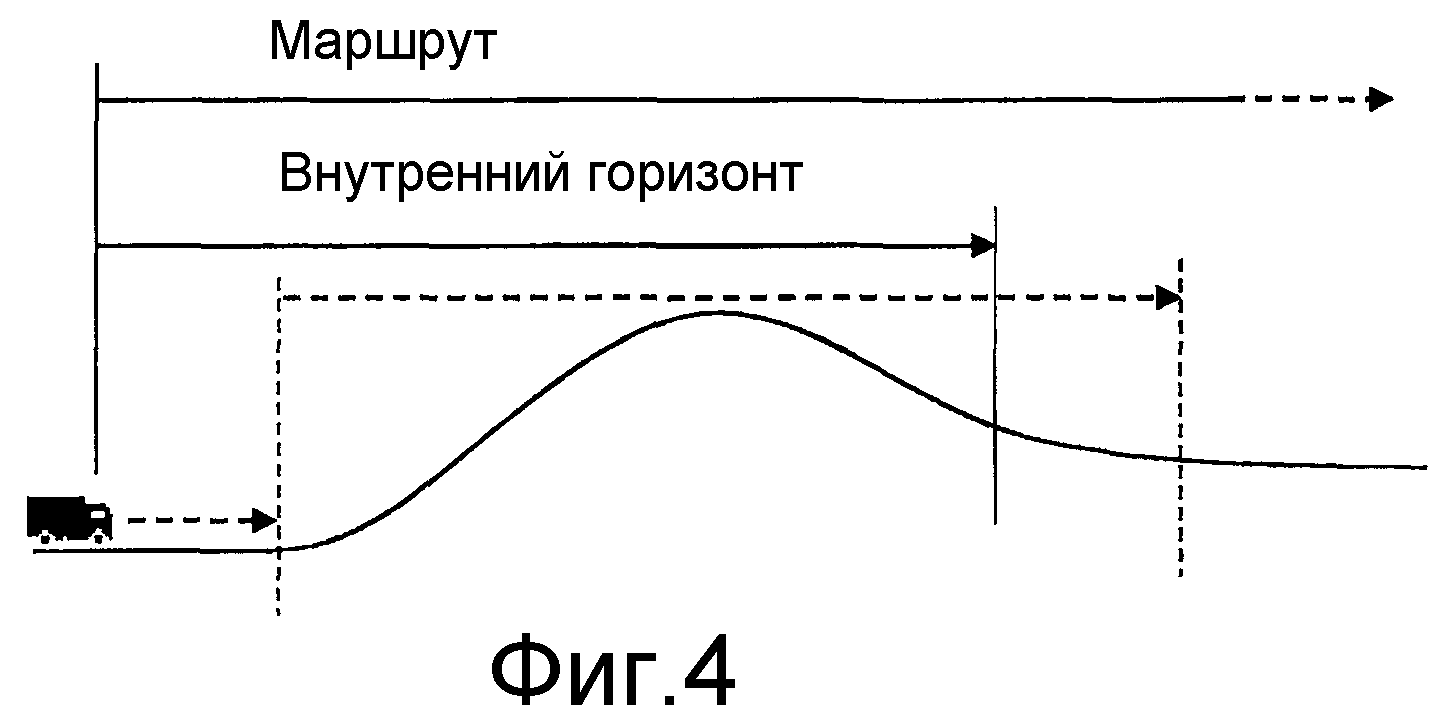
Фиг. 4 - иллюстрация длины горизонта системы управления относительно длины маршрута для транспортного средства;
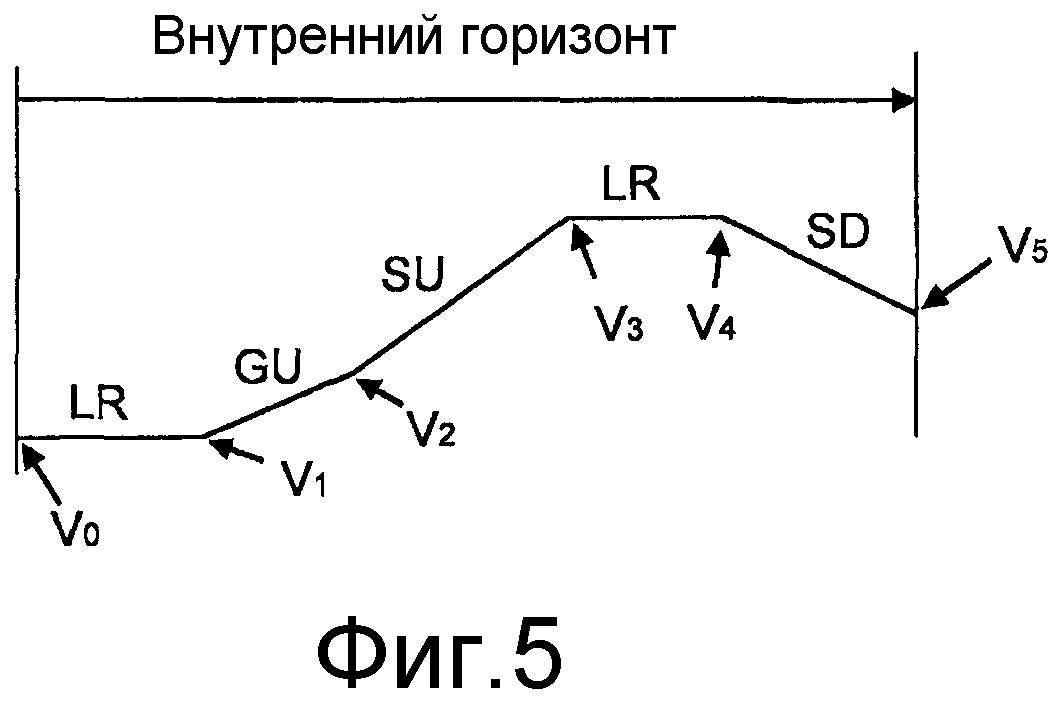
Фиг. 5 - иллюстрация различных прогнозируемых скоростей и категорий участков, которые непрерывно обновляются по мере добавления к горизонту новых участков; и
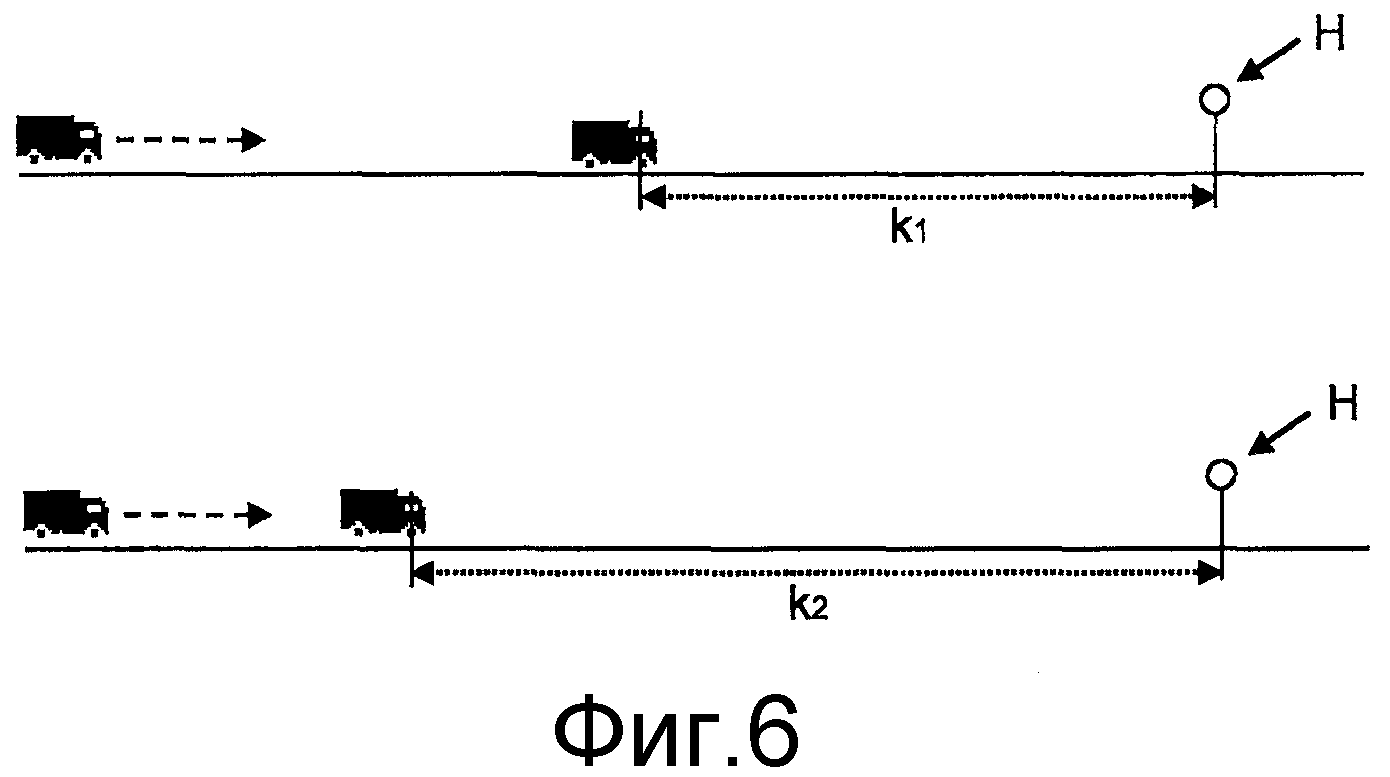
Фиг. 6 - иллюстрация управления с устройством автоматического поддержания скорости в соответствии с изобретением по сравнению с традиционным устройством автоматического поддержания скорости.
Подробное описание предпочтительных вариантов осуществления изобретения
Информация о маршруте транспортного средства может использоваться для регулирования его скорости с упреждением для экономии топлива, повышения безопасности и комфорта. Топография значительно воздействует на управление, в частности, на трансмиссию грузовых автомобилей, так как требуется намного больший крутящий момент при подъеме, чем при спуске, и обеспечение подъема на некоторые возвышения без переключения передач. Предстоящие препятствия, которые требуют снижения скорости транспортного средства, воздействуют на расход топлива и увеличивают износ тормозов, так как водитель транспортного средства часто видит препятствие настолько поздно, что он вынужден затормаживать транспортное средство для достижения надлежащей скорости перед препятствием. Знание того, где находятся такие препятствия, позволяет с упреждением регулировать скорость транспортного средства.
Транспортное средство снабжено системой позиционирования и информацией карты, и топологические данные от системы позиционирования и топологические данные от информации карты используются для создания горизонта, который представляет характер маршрута. В описании настоящего изобретения указана система глобального позиционирования (GPS) для определения топологических данных для транспортного средства, но следует понимать, что также могут рассматриваться другие виды глобальных или региональных систем позиционирования для снабжения транспортного средства данными позиционирования, например, системы, в которых используется радиоприемник для определения положения транспортного средства. Транспортное средство также может использовать датчики для сканирования окрестностей и, таким образом, определения его положения.
На фиг. 1 показано, как блок включает информацию карты и системы глобального позиционирования о маршруте. Маршрут показан ниже как единственный маршрут для транспортного средства, но следует понимать, что информация о различных предполагаемых маршрутах может быть включена при помощи карт и системы глобального позиционирования или других систем позиционирования.
В соответствии с вариантом осуществления изобретения, транспортное средство оборудовано навигационной системой, посредством которой определяется маршрут для транспортного средства. Водитель, например, может регистрировать исходную точку и пункт назначения, и система будет направлять его/ее к пункту назначения самым быстрым или самым коротким маршрутом. Навигационная система использует, например, цифровую карту, информацию о положении от приемника системы глобального позиционирования, спидометра транспортного средства и гирокомпаса и направляет водителя к пункту назначения визуально при помощи экрана. Навигационная система может быть оснащена для предоставления быстро изменяющейся информации системы радиоданных по каналу сообщений о движении транспорта, которая является средством передачи информации о движении в цифровой форме через обыкновенную радиосеть ЧМ. Динамическая навигация посредством системы радиоданных по каналу сообщений о движении транспорта учитывает транспортную ситуацию, когда транспортное средство находится в движении, и если, например, запланированный водителем маршрут заблокирован из-за дорожно-транспортного происшествия, навигационная система может получить эту информацию через систему радиоданных по каналу сообщений о движении транспорта и предложить альтернативный маршрут. Большинство навигаторов также имеет информацию о дорожных работах, и, таким образом, информация об их местоположении может быть получена, и водитель может узнать о них вовремя.
Маршрут, выбранный навигационной системой, может совпадать с маршрутом, выбранным водителем, и в этом случае нет необходимости в создании горизонтов для каждого возможного маршрута, так как требуется только маршрут, выбранный навигационной системой. Это приводит к уменьшению нагрузки процессора, использования памяти и трафика контроллерной сети (CAN) транспортного средства, так как информация об альтернативных маршрутах не должна храниться или обрабатываться.
Маршрут или, если существуют две или больше возможных альтернатив, маршруты посылаются поразрядно через контроллерную сеть к модулю для определения заданных значений, причем модуль может быть отдельным или может формировать часть системы, которая должна использовать заданные значения для регулирования скорости транспортного средства, например, системы управления двигателем. В альтернативном варианте блок с картами и системой позиционирования также может быть частью системы, которая использует заданные значения скорости для регулирования. В модуле регулирования биты соединяются в блоке горизонта для формирования горизонта и обрабатываются процессорным блоком для получения внутреннего горизонта, благодаря которому система управления может регулировать. Если существуют два или больше альтернативных маршрутов, создается множество внутренних горизонтов для альтернативных вариантов. Горизонт тогда непрерывно дополняется новыми битами от блока с данными системы глобального позиционирования и данными карты для поддержания желательной длины горизонта. Горизонт, таким образом, непрерывно обновляется, когда транспортное средство находится в движении.
Контроллерная сеть (CAN) представляет собой систему последовательной шины, специально разработанную для использования в транспортных средствах. Шина данных контроллерной сети обеспечивает обмен цифровыми данными между датчиками, регулирующими компоненты, приводы, управляющие устройства и т.д. и обеспечивает то, что два или более управляющих устройств могут иметь доступ к сигналам от данного датчика, чтобы использовать их для управляющих компонентов, связанных с ними.
На фиг. 2 показана блок-схема, поясняющая этапы, которые включает способ, соответствующий варианту осуществления изобретения. Пример, описанный ниже, относится только к одному горизонту, но следует понимать, что два или больше горизонтов могут быть созданы для различных альтернативных маршрутов параллельно. Первый этап A) определяет горизонт на основе данных позиционирования и данных карты маршрута, составленный из участков маршрута с характеристиками длины и градиента для каждого участка. Когда транспортное средство находится в движении, модуль горизонта соединяет биты для формирования горизонта маршрута, причем длина горизонта составляет, в типичном случае, от 1 до 2 км. Блок горизонта отслеживает местоположение транспортного средства и непрерывно дополняет горизонт таким образом, чтобы длина горизонта поддерживалась постоянной. В соответствии с вариантом осуществления изобретения, когда пункт назначения находится в пределах длины горизонта, горизонт больше не прибавляется, поскольку движение за пределами пункта назначения не относится к делу.
Горизонт составлен из участков маршрута, которые имеют взаимосвязанные характеристики. Горизонт здесь иллюстрируется матричной формой, в которой каждая колонка содержит характеристику для участка. Матрица, покрывающая маршрут на 80 м вперед, может иметь следующую форму:
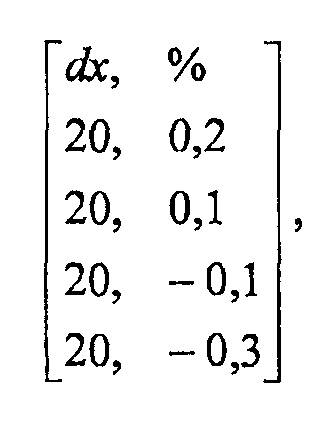
где первая колонка - длина (dx) каждого участка в метрах, а вторая колонка - градиент в % каждого участка. Матрицу следует рассматривать таким образом, что для 20 метров вперед от настоящего положения транспортного средства градиент составляет 0,2%, после чего следуют 20 метров с градиентом 0,1% и так далее. Величины для участков и градиенты могут не быть выражены в относительных значениях, но могут, вместо этого, быть выражены в абсолютных величинах. Матрица, предпочтительно, имеет векторную форму, но может, вместо этого, иметь структуру указателя в форме пакетов данных и т.п. Существуют различные другие потенциальные характеристики для участков, например, радиус кривизны, дорожные знаки, различные препятствия и т.д.
Если горизонт содержит препятствия в форме дорожных знаков, дорожных работ и т.д., матрица может принимать следующую форму:
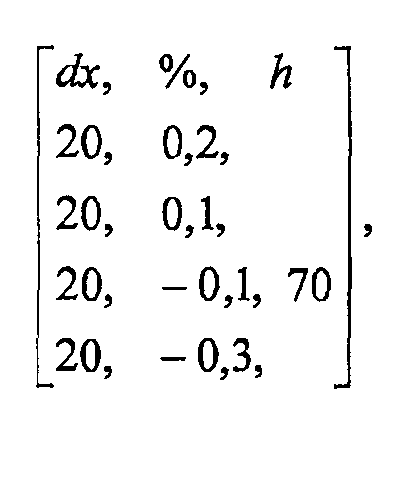
где колонка h содержит препятствие в форме дорожного знака, указывающего ограничение скорости 70 км/ч. Если горизонт имеет радиусы кривизны, как характеристики, высокие вычисленные величины поперечного ускорения, например, могут составлять препятствие. Характеристики препятствий вдоль маршрута могут не требовать такой же матрицы, как горизонт, но могут быть посланы как отдельные объемы данных в модуль, показанный на фиг. 1, совместно с расстоянием от препятствия до транспортного средства. Информация о препятствиях также может быть предоставлена через навигационную систему транспортного средства, если транспортное средство им оборудовано. Характеристики, представляющие препятствия и полученные через навигационную систему, могут быть, например, дорожными работами или дорожно-транспортными происшествиями. Характеристика указывает препятствие, изображая, например, ограничение скорости, крутой поворот, объездной путь, перекресток, дорожные работы и т.д.
Затем участки в пределах горизонта размещаются в различных категориях на этапе B), на котором вычисляются пороговые значения для указанной, по меньшей мере, одной характеристики участков в соответствии с одним или более значений, специфических для транспортного средства, причем указанные пороговые значения служат граничными значениями для назначения участков в различные категории. Пороговые значения для градиента вычисляются, в соответствии с вариантом осуществления изобретения, при помощи одного или более значений транспортного средства, например, текущего передаточного отношения, текущего веса транспортного средства, максимальной кривой вращающего момента двигателя, механического трения и/или сопротивления движению транспортного средства с данной скоростью. Модель транспортного средства в системе управления используется для оценки сопротивления движению с данной скоростью. Передаточное отношение и максимальный крутящий момент являются известными величинами в системе управления транспортного средства, и вес транспортного средства оценивается в оперативном режиме.
Далее приведены примеры пяти различных категорий, в которые могут быть размещены участки, когда градиент участков используется для принятия решений для управления транспортным средством:
Горизонтальная дорога: участок с градиентом 0 ± отклонение.
Крутой подъем: участок со слишком крутым градиентом для транспортного средства для поддержания скорости на текущей передаче.
Плавный подъем: участок с градиентом между отклонением и пороговым значением для крутого подъема.
Крутой спуск: участок с таким крутым наклонным градиентом, что транспортное средство ускоряется градиентом.
Плавный спуск: участок с наклонным градиентом между отрицательным отклонением и пороговым значением для крутого спуска.
В соответствии с вариантом осуществления изобретения, характеристиками участков являются их длина и градиент, и помещение участков в описанные выше категории включает вычисление пороговых значений в форме двух пороговых значений lmin и lmax градиента, где lmin - минимальный градиент для транспортного средства, ускоряемого градиентом спуска, и lmax - максимальный градиент, при котором транспортное средство может поддерживать скорость без переключения передачи при подъеме. Таким образом, транспортное средство может регулироваться в соответствии с градиентом и участком дороги впереди таким образом, что им можно управлять с экономией топлива при помощи устройства автоматического поддержания скорости на холмистой местности. В другом варианте осуществления изобретения характеристиками участков являются их длина и поперечное ускорение, и пороговые значения вычисляются в форме пороговых значений поперечного ускорения, которые классифицируют участки на основе того, какое поперечное ускорение они вызывают. Затем участки могут быть обозначены поперечным ускорением. Скорость транспортного средства может затем регулироваться таким образом, что им можно управлять с обеспечением экономии топлива и безопасности дорожного движения относительно изгибов дороги, то есть любое уменьшение скорости перед поворотом будет в максимально возможной степени осуществляться без использования основных тормозов.
Например, отклонение для категории "горизонтальная дорога", предпочтительно, составляет между 0,05% и -0,05%, когда транспортное средство движется со скоростью 80 км/ч. На основе этой же скорости (80 км/ч), lmin обычно вычисляется в диапазоне от -2 до -7%, и lmax обычно составляет 1-6%. Однако эти величины значительно зависят от текущего передаточного отношения (передача + постоянное передаточное число задней оси), характеристик двигателя и общего веса.
На следующем этапе C) способа, по меньшей мере, одна характеристика, то есть, в этом случае, градиент сравнивается с расчетными пороговыми значениями, и каждый участок помещается в категорию по результатам сравнений.
После каждого участка в пределах горизонта, помещенного в категорию, внутренний горизонт для системы управления может быть создан на основе классификации участков, и горизонт, содержащий входные скорости vi для каждого участка, которую должна соблюдать система управления. В соответствии с вариантом осуществления изобретения, изменение скорости, которое затребовано между двумя входными скоростями vi, линейно изменяется для снабжения системы управления заданными значениями vref, которые вызывают постепенное увеличение или уменьшение скорости транспортного средства. Линейное изменение скорости приводит к вычислению постепенных изменений скорости, которые должны осуществляться для достижения изменения скорости. Другими словами, линейное изменение приводит к линейному увеличению скорости. Входные скорости vi, то есть, заданные значения vref скорости для систем управления транспортными средствами вычисляются на этапе D) в соответствии со способом согласно изобретению в соответствии с горизонтом согласно правилам, относящимся к категориям, в которые помещены участки в пределах горизонта. Правила, имеющие отношение к категориям участка, объяснены ниже. Когда характеристика на участках в пределах горизонта указывает препятствие, осуществляются следующие этапы: E) вычисление замедления транспортного средства при предположении, что тормоза не используются в соответствии с указанными правилами, относящимися к категориям участка, и F), определение исходного положения в пределах горизонта для начала замедления транспортного средства в соответствии с его расчетным замедлением для достижения снижения заданной скорости vref до максимальной скорости, требуемой препятствием в местоположении препятствия. Таким образом, достигается адаптация опорных значений vref скорости для системы управления относительно препятствий.
Замедление транспортного средства без использования тормозов до снижения до определенной скорости, обозначенной препятствием, например, дорожным знаком, указывающим ограничение скорости 70 км/ч, вычисляется в соответствии с категорией участка, на котором транспортное средство в это время находится, с использованием любой из формул (1) или (2), приведенных ниже. Когда замедление, таким образом, известно, может быть достигнуто расстояние, которое будет пройдено при замедлении до определенной скорости, здесь названное пробегом замедления. Исходное положение в пределах горизонта для начала замедления транспортного средства для достижения скорости, требуемой из-за препятствия в местоположении препятствия, может тогда вычисляться посредством соотношения пробега замедления и расстояния до препятствия. Снижение заданной скорости vref до максимальной скорости, требуемой препятствием, таким образом, может быть достигнуто в местоположении препятствия без торможения транспортного средства.
Затем заданные значения vref скорости в пределах горизонта адаптируются на этапе G) в соответствии с указанным исходным положением и замедлением транспортного средства. Все участки в пределах горизонта проходятся непрерывно, и, по мере добавления к горизонту новых участков, входные скорости vi регулируются в них как необходимо в пределах диапазона расчетной скорости vset. Vset является расчетной скоростью, которая задана водителем и поддержание которой желательно при помощи систем управления транспортного средства при движении в пределах диапазона. Диапазон ограничен двумя скоростями Vmin и vmax, которые могут быть заданы водителем вручную или установлены автоматически посредством вычисления пригодных диапазонов, предпочтительно, вычисленных в модуле регулирования. Заданные значения скорости в пределах горизонта, таким образом, адаптируются к vmax, устанавливаемой согласно ограничению скорости, имеющему отношение к препятствию в местоположении препятствия. Местоположение для начала замедления представляет положение в пределах горизонта, где система управления должна прекратить ускорение транспортного средства, и сигнал прекратить ускорение будет послан в систему управления в соответствующем местоположении. Транспортное средство затем регулируется на этапе H) в соответствии с заданными значениями скорости, что приводит к регулированию системой управления двигателем в транспортном средстве скорости транспортного средства в соответствии с заданными значениями. В местоположении препятствия и на желательном расстоянии после него транспортное средство снова будет ускорено для поддержания необходимой скорости с ограничением до vmax, установленной на уровне максимальной скорости, требуемой препятствием.
В соответствии с вариантом осуществления изобретения, регулирование скорости транспортного средства для учета препятствий является необязательной установкой для водителя. Это позволяет ему/ей решать, должна ли скорость транспортного средства быть адаптирована в соответствии с обнаруженными препятствиями, например, как функция, которая может быть включена или выключена. Это желательно, когда система, которая всегда заставляет транспортное средство поддерживать скорость после различных ограничений скорости, может вызывать раздражение многих водителей.
В альтернативном варианте или в комбинации с приведенным выше вариантом осуществления изобретения, способ содержит этап F1) после этапа F) для указания водителю транспортного средства, что будет осуществляться изменение скорости, и этап G) затем осуществляется по указанию водителя. Этот вариант осуществления изобретения поясняется блок-схемой на фиг. 3. Водитель, таким образом, может быть осведомлен о предстоящем изменении скорости, например, указанием на приборной панели, после чего он или она может подтвердить, хочет ли он или она, чтобы поддерживалась новая скорость. Скорость транспортного средства, конечно, может быть изменена прежде, чем водитель понял, что существует ограничение скорости из-за препятствия, и он или она, таким образом, может выбирать скорость и понимать причину изменения скорости.
Эффекты изобретения поясняет фиг. 6. Верхняя схема показывает, как скорость транспортного средства регулируется традиционным устройством автоматического поддержания скорости. Водитель видит препятствие H на приблизительном расстоянии k1 и начинает снижать скорость, отпуская педаль акселератора и тормозя. Нижняя схема показывает, как согласно настоящему изобретению вычисляется, что транспортное средство должно прекратить ускорение на определенном расстоянии k2 перед препятствием H для исключения необходимости излишнего расхода энергии торможения. Пробег замедления, в этом случае, составляет k2. Топливо транспортного средства, таким образом, может быть сэкономлено.
В соответствии с вариантом осуществления изобретения, максимальная скорость, требуемая препятствием, ограничивает скорость транспортного средства для предопределенной длины горизонта. Эта длина может отличаться для различных типов препятствий. Таким образом, ограниченная скорость может поддерживаться на протяжении всей длины препятствия без необходимости обозначения конечной точки для препятствия. Предопределенная длина, вместо этого, может быть обозначена исходной точкой и конечной точкой и вычислена на их основе. Конечная точка, например, может быть обозначена следующим дорожным знаком, указывающим большее ограничение скорости, или концом моста или дорожных работ.
Характеристика, в некоторых случаях, может быть препятствием, а в других нет. В соответствии с вариантом осуществления изобретения, характеристика указывает препятствие в связи с некоторым другим параметром, например, температурой. В нормальных условиях мост не требует какого-либо изменения скорости транспортного средства, но когда температура около или ниже 0°, требуется снижать скорость транспортного средства для снижения риска дорожно-транспортного происшествия на скользкой дорожной поверхности.
Заданные значения vref для системы управления в транспортном средстве могут изменяться между двумя указанными выше скоростями vmin и vmax. Когда модуль регулирования прогнозирует внутренний горизонт для скорости транспортного средства, скорость транспортного средства может изменяться в пределах этого диапазона.
Различные правила для категорий участков, таким образом, регулируют то, как должна корректироваться входная скорость vi для каждого участка. Если участок будет размещен в категории "горизонтальная дорога", изменения входной скорости vi для участка не будут происходить. В противоположность этому, если vi не равна vset, заданные значения скорости будут линейно изменяться до vset согласно требованиям комфорта для поддержания скорости, желаемой для водителя. Управление транспортным средством таким образом, чтобы удовлетворять требованиям комфорта, задействует уравнение Торричелли, приведенное ниже, для вычисления постоянного ускорения или замедления, которые должны прилагаться к транспортному средству:
v2 slut=v2 i+2·a·s (1)
где vi - скорость входа в участок, vslut - скорость транспортного средства в конце участка, а - постоянное ускорение/замедление и s - длина участка.
Если участок находится в категории "крутой подъем" или "крутой спуск", конечная скорость vslut для участка прогнозируется посредством решения уравнения (2), приведенного ниже:
V2 slut=(a·v2 i+b)·(e(2·a·s/M)-b)/a (2)
где
a=-Cd·p·A/2 (3)
b=Ftrack-Froll-Fa (4)
Ftrack=(Teng·ifinal·igear·µgear)/rwheel (5)
Froll=flatCorr·M·g/1000·(CrrisoF+Cb·(vi-viso)+CaF·(v2 i-v2 iso)) (6)
Fa=M·g·sin(arctan(α)) (7)
flatCorr=1/√(1+rwheel/2,70) (8)
где Cd - коэффициент сопротивления воздуха, p - плотность воздуха, А - самая большая площадь поперечного сечения транспортного средства, Ftrack - сила, действующая от крутящего момента двигателя в направлении движения транспортного средства, Froll - сила от сопротивления качению, воздействующего на колеса, Fa - сила, воздействующая на транспортное средство из-за градиента α участка, Teng - крутящий момент двигателя, ifinal -конечная передача транспортного средства, igear - текущее передаточное отношение коробки передач, µgear - эффективность зубчатой передачи, rwheel - радиус колеса транспортного средства, М - вес транспортного средства, CaF и Cb - коэффициенты, зависящие от скорости, относящиеся к сопротивлению качению колес, CrrisoF - постоянный член, относящийся к сопротивлению качению колес, и viso - скорость согласно требованиям ИСО, например, 80 км/ч.
На участках в категории "крутой подъем" конечная скорость vslut затем сравнивается с Vmin, и если vslut<Vmin, то vi должна быть увеличена таким образом, чтобы
vi=min(vmax, vi+(vmin-vslut) (9),
иначе изменение vi не происходит, так как vslut удовлетворяет требованию нахождения в пределах диапазона для расчетной скорости.
На участках в категории "крутой спуск" конечная скорость vslut сравнивается с Vmax, и если vslut>vmax, то vi должна быть уменьшена таким образом, чтобы
vi=max(vmin, vi-(vslut -vmax)) (10),
иначе изменение vi не происходит, так как vslut удовлетворяет требованию нахождения в пределах диапазона для расчетной скорости.
Уравнение Торричелли (1) здесь снова используется для вычисления того, возможно ли достижение Vslut с входной скоростью vi с соблюдением требований комфорта, то есть, с заданным максимальным постоянным ускорением/замедлением. Если это невозможно из-за длины участка, vi увеличивается или уменьшается таким образом, чтобы могло соблюдаться требование комфорта, то есть, осуществление не слишком большого ускорения/замедления.
На участках в категории "плавный подъем" заданное значение vref может изменяться между vmin и vset, когда включен новый участок, то есть, vmin≤vref≤vset. Если vref≥Vmin, ускорение транспортного средства не осуществляется. Однако если vref<vmin, то vref применяется к vmin на протяжении участка, или если vref>vset, то vref линейно изменяется к vset посредством уравнения (1). На участках в категории "плавный спуск" vref может изменяться между vset и vmax, когда включен новый участок, то есть, vset≤vref≤vmax, и если vref≤Vmax, замедление транспортного средства не осуществляется. Однако если vref>vmax, то vref применяется к Vmax на протяжении участка, или если vref<vset, то vref линейно изменяется к vset посредством уравнения (1). Пять указанных выше категорий участков могут быть упрощены до трех посредством удаления категорий "плавный подъем" и "плавный спуск". Категория "горизонтальная дорога" тогда покроет больший диапазон, ограниченный расчетными пороговыми значениями lmin и lmax, и, таким образом, градиент на участке должен быть меньше, чем lmin, если градиент отрицательный, или больше, чем lmax, если градиент положительный.
Когда участок, который следует после участка в пределах горизонта, который находится в категории "плавный подъем" или "плавный спуск", вызывает изменение входных скоростей относительно участков в этих категориях, это может означать, что входные скорости и, следовательно, заданные скорости для системы управления корректируются и становятся более высокими или низкими, чем задано указанными выше правилами для категорий "плавный подъем" или "плавный спуск". Таким образом, это применяется, когда входные скорости для участков корректируются согласно последующим участкам.
Замедление транспортного средства до определенной скорости, обозначенной препятствием, например, дорожным знаком, указывающим ограничение скорости 70 км/ч, вычисляется в соответствии с категорией соответствующего участка, на котором транспортное средство находится в это время, с использованием любой из указанных выше формул (1) или (2). Когда замедление, таким образом, известно, может быть достигнуто расстояние, которое будет пройдено при замедлении до определенной скорости, здесь названное пробегом замедления. Исходное положение в пределах горизонта для начала замедления транспортного средства для достижения скорости, требуемой из-за препятствия в местоположении препятствия, может тогда вычисляться посредством соотнесения пробега замедления и расстояния до препятствия. Таким образом, может быть достигнуто снижение заданной скорости vref до максимальной скорости, требуемой препятствием, в местоположении препятствия.
Все запрошенные изменения скорости, таким образом, осуществляются линейно посредством уравнения Торричелли (1) таким образом, что они происходят с соблюдением требований комфорта. Таким образом, общее правило требует не увеличивать заданную скорость vref на подъеме, так как любое возможное увеличение скорости vref должно иметь место прежде, чем подъем начинается, если транспортным средством следует управлять в экономичном режиме. По этой же причине, заданная скорость vref не должна быть снижена на спуске, так как любое возможное уменьшение скорости vref должно иметь место перед движением на спуске.
Благодаря непрерывному прохождению через все участки в пределах горизонта, можно определять внутренний горизонт, который определяет прогнозируемые входные значения vi для каждого участка. В соответствии с вариантом осуществления изобретения, этап A) выполняется непрерывно, пока горизонт не превышает запланированного маршрута для транспортного средства, и этапы B)-E) выполняются непрерывно для полной длины горизонта. Горизонт обновляется, предпочтительно, по частям и имеет, в соответствии с вариантом осуществления изобретения, не такую же непрерывность его обновления, как на этапах B)-E). Внутренний горизонт обновляется непрерывно по мере добавления к горизонту новых участков, например, два-три раза в секунду. Непрерывное прохождение участков в пределах горизонта включает непрерывное вычисление входных величин vi для каждого участка, и вычисление входной величины vi может вызывать необходимость изменения входных значений как вперед, так и назад в пределах внутреннего горизонта. Подобным образом, когда это применимо, входные величины должны изменяться вперед и назад в пределах горизонта, если в его пределах существует препятствие. Где, например, прогнозируемая скорость на участке находится вне заданного диапазона, необходимо скорректировать скорость на предыдущих участках.
На фиг. 4 показан внутренний горизонт относительно маршрута. Внутренний горизонт непрерывно перемещается вперед, как обозначено показанным пунктиром перемещающимся вперед внутренним горизонтом. На фиг. 5 показан пример внутреннего горизонта, в котором различные участки помещены в категории. На схеме "LR" относится к "горизонтальной дороге", "GU" к "плавному подъему", "SU" к "крутому подъему" и "SD" к "крутому спуску". Первоначально скорость составляет v0, и если она не равна vset, заданные значения линейно изменяются от v0 до vset с соблюдением требований комфорта в соответствии с уравнением Торричелли (1), поскольку категория соответствует "горизонтальной дороге". Следующий участок представляет собой "плавный подъем", и изменение vref не осуществляется, пока vmin≤vref≤vset, поскольку ускорение на этом участке не должно осуществляться. Следующий участок представляет собой "крутой подъем", при этом конечная скорость V3 для него прогнозируется посредством формулы (2), и, таким образом, V2 должна быть увеличена, если V3<Vmin в соответствии с формулой (9). Следующий участок представляет собой "горизонтальную дорогу", при этом vref изменяется до vset с ограничением требований комфорта согласно уравнению Торричелли (1). Затем следует участок, который является "крутым спуском", при этом конечная скорость V5 прогнозируется посредством формулы (2), и V4 должна быть уменьшена, если v5>Vmax в соответствии с формулой (10). Как только скорость изменена в обратном направлении во внутреннем горизонте, остающиеся скорости в обратном направлении во внутреннем горизонте корректируются для дополнительной выдачи скорости вперед. При каждом изменении скорости, которое должно быть произведено, согласно способу, соответствующему изобретению, посредством уравнения Торричелли (1) вычисляется, возможно ли достижение изменения скорости с соблюдением требований комфорта. В противном случае, скорость входа в участок корректируется таким образом, чтобы удовлетворялись требования комфорта.
Настоящее изобретение также относится к модулю для учета препятствий при регулировании скорости транспортного средства, показанному на фиг. 1. Модуль содержит блок горизонта, приспособленный для определения горизонта при помощи полученных данных позиционирования и данных карты, составленного из участков маршрута, по меньшей мере, с одной характеристикой для каждого участка. Модуль также содержит процессорный блок, приспособленный для выполнения этапов В)-D) способа, описанных выше. Модуль также содержит блок препятствий, приспособленный для выполнения этапов E) и F) согласно описанному способу, когда, по меньшей мере, одна характеристика любого из участков в пределах горизонта указывает препятствие. Процессорный блок также приспособлен для адаптации опорных значений vref скорости в пределах горизонта в соответствии с указанным исходным положением и замедления транспортного средства, после чего система управления в транспортном средстве регулирует скорость транспортного средства в соответствии с заданными значениями vref скорости. В результате получен модуль, который может использоваться в транспортном средстве для определения заданных значений скорости, которые заданы с учетом препятствий вдоль маршрута транспортного средства. Модуль может быть частью системы управления, для которой он предназначен, для определения заданных значений скорости, или может быть автономным модулем, отдельным от системы управления. Система управления, например, система управления двигателем, в таком случае, регулирует скорость транспортного средства в соответствии с заданными значениями скорости.
Специфические значения транспортного средства, такие как текущее передаточное отношение, текущий вес транспортного средства, кривая максимального крутящего момента двигателя, механическое трение и/или сопротивление движению транспортного средства с данной скоростью, предпочтительно, заданы процессорному блоку. Пороговые значения, таким образом, могут быть определены на основе состояния транспортного средства в этот момент. Сигналы, необходимые для определения этих величин, могут быть получены из контроллерной сети или могут быть обнаружены соответствующими датчиками.
В соответствии с вариантом осуществления изобретения, блок препятствия приспособлен для обнаружения препятствия в пределах горизонта на основе того факта, что характеристика для участка указывает ограничение скорости, крутой поворот, объездной путь или перекресток и т.д. Блок препятствия получает информацию о препятствиях, например, в форме пошагового вектора горизонта или посредством других данных, которые представляют расстояние от транспортного средства до препятствия, участок маршрута или относятся к внешней системе координат. Это позволяет адаптировать скорость транспортного средства к различным видам препятствий.
В соответствии с другим вариантом осуществления изобретения, блок препятствия приспособлен для определения расстояния, для которого максимальная скорость, требуемая препятствием, ограничивает скорость транспортного средства. В этом случае, vmax для участка маршрута будет задана на уровне максимальной скорости, требуемой препятствием, и могут быть, например, различные стандартные расстояния для различных препятствий. Максимальная скорость, требуемая препятствием, может, в соответствии с вариантом осуществления изобретения, ограничивать скорость транспортного средства, например, до следующего дорожного знака в пределах горизонта, который указывает другую скорость для транспортного средства, которую следует поддерживать. Это позволяет достигать снижения скорости транспортного средства на более протяженном расстоянии.
Блок препятствия может быть приспособлен для определения, указывает ли характеристика на препятствие вследствие какого-либо другого параметра, например, температуры. Это учитывает вероятность того, что мост, который обычно не является препятствием, может стать препятствием, если температура падает ниже определенного уровня.
Функция модуля относительно учета препятствий и, таким образом, достижения регулирования скорости транспортного средства для экономии топлива и снижения износа тормозов при встрече с препятствиями, предпочтительно, приспособлена для того, чтобы быть необязательной установкой для водителя. Водитель может тогда включать или выключать функцию и не приспосабливаться к транспортной ситуации. Функция препятствий, таким образом, будет необязательной. В соответствии с вариантом осуществления изобретения, блок препятствия приспособлен для указания для водителя транспортного средства, что будет осуществляться изменение скорости и что получены входные данные, которые принимают или отклоняют изменение скорости. Указание, например, может быть представлено для водителя на приборной панели таким образом, чтобы он мог активно согласиться с изменением.
Блок горизонта, в соответствии с вариантом осуществления изобретения, может быть адаптирован для определения горизонта маршрута, который определен посредством навигационной системы. В настоящее время многие транспортные средства оборудованы навигационными системами, при этом блок горизонта должен только создавать горизонт для единственного маршрута вместо многих параллельных маршрутов. Это позволяет среди прочего экономить мощность процессора.
В соответствии с вариантом осуществления изобретения, характеристиками участков являются их длина и градиент, и процессорный блок приспособлен для вычисления пороговых значений в форме пороговых значений градиента lmin и lmax. Таким образом, скорость транспортного средства может регулироваться в соответствии с волнистостью маршрута для движения в режиме экономии топлива.
В соответствии с другим вариантом осуществления изобретения, характеристиками участков являются их длина и поперечное ускорение, и процессорный блок приспособлен для вычисления пороговых значений в форме пороговых значений поперечного ускорения. Это означает, что скорость транспортного средства может регулироваться в соответствии с кривизной дороги впереди, и скорость транспортного средства может быть предварительно отрегулирована таким образом, чтобы ненужные торможения и увеличения скорости были минимизированы для экономии топлива.
Блок горизонта, предпочтительно, приспособлен для непрерывного определения горизонта, пока горизонт не превышает запланированного маршрута для транспортного средства, и процессорный блок приспособлен для непрерывного осуществления этапов для вычисления и обновления заданных значений для системы управления на протяжении всей длины внутреннего горизонта. В варианте осуществления изобретения горизонт, таким образом, создается по частям прогрессивно по мере движения транспортного средства по маршруту. Заданные значения для системы управления вычисляются и обновляются непрерывно независимо от того, прибавлены ли новые участки или нет, так как заданные значения, которые будут вычисляться, зависят также от того, как специфические значения транспортного средства изменяются вдоль маршрута.
Настоящее изобретение также относится к компьютерному программному продукту, содержащему команды компьютерной программы для выполнения компьютерной системой транспортного средства этапов в соответствии со способом, когда команды компьютерной программы выполняются указанной компьютерной системой. Команды компьютерной программы предпочтительно, хранятся на носителе, который пригоден для считывания компьютерной системой, например, компакт-диске, флэш-памяти, или они могут быть переданы без проводов или по линии в компьютерную систему.
Настоящее изобретение не ограничено описанными выше вариантами его осуществления. Могут использоваться различные альтернативы, модификации и эквиваленты. Приведенные выше варианты осуществления изобретения не ограничивают объем изобретения, который определен только прилагаемой формулой изобретения.
Кровать с изменяемыми размерами
Устройство для приведения в действие системы управления уровнем подвески в транспортном средстве
Инструментальный отсек и узел панели, предназначенный для него
Устройство для охлаждения рециркулирующих выхлопных газов двигателя внутреннего сгорания
Устройство для расцепления привода
Конструкция и способ для демпфирования перемещения поршня
Способ и устройство для изменения восприятия рулевого управления в механизме рулевого управления транспортного средства, а также транспортное средство, содержащее такое устройство
Модуль для системы управления транспортным средством
Модуль для определения опорных значений для системы управления транспортным средством
Способ и модуль для управления скоростью транспортного средства
Кровать с изменяемыми размерами
Устройство для приведения в действие системы управления уровнем подвески в транспортном средстве
Инструментальный отсек и узел панели, предназначенный для него
Устройство для охлаждения рециркулирующих выхлопных газов двигателя внутреннего сгорания
Устройство для расцепления привода
Конструкция и способ для демпфирования перемещения поршня
Способ и устройство для изменения восприятия рулевого управления в механизме рулевого управления транспортного средства, а также транспортное средство, содержащее такое устройство
Модуль для системы управления транспортным средством
Модуль для определения опорных значений для системы управления транспортным средством
Способ и модуль для управления скоростью транспортного средства

