Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ГИДРОДИНАМИЧЕСКИХ ПАРАМЕТРОВ МАТЕМАТИЧЕСКОЙ МОДЕЛИ СУДНА
Вид РИД
Изобретение
Изобретение относится к области судовождения и может быть использовано для прогнозирования движения судна при маневрировании.
Известен способ определения гидродинамических параметров математической модели судна (Пат. РФ №2442718, опубл. 20.02.2012), основанный на измерении с помощью приемников спутниковой навигационной системы с дифференциальными поправками в реальном масштабе времени координат двух определенным образом разнесенных в диаметральной плоскости по длине судна точек, условно названных носовой и кормовой, и определении, с использованием данных измерений текущих координат этих точек, текущих значений кинематических параметров движения судна:
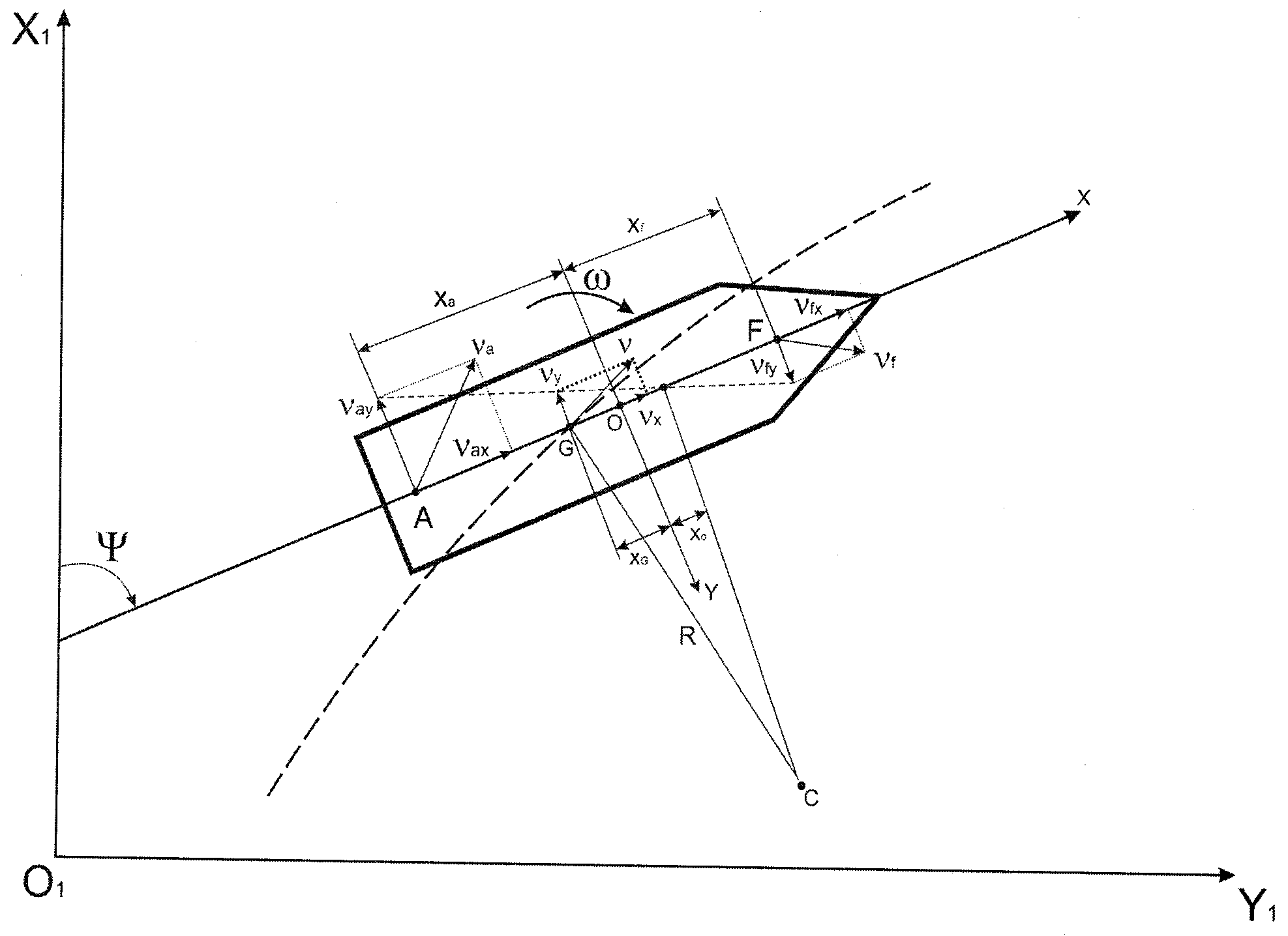
- линейных скоростей носовой F (υf) и кормовой A (υa) точек и их проекций на продольную X (υxf, υха) и поперечную Y (υyf, υya) координатные оси подвижной системы координат ZXОY, связанной с судном;
- абсциссы центра вращения (хо) в системе координат ZXОY;
- проекции вектора линейной скорости в центре тяжести на поперечную ось Y (υy);
- линейной скорости центра тяжести судна (υ);
- радиуса кривизны траектории ЦТ судна (R);
- угловой скорости судна (ω),
которые используют для вычисления текущих значений гидродинамических параметров математической модели судна, на базе которой выполняют компьютерное моделирование с целью прогнозирования движения судна при маневрировании. Данный способ наиболее близок к предлагаемому и принят за прототип.
Недостатком данного способа является то, что для определения кинематических параметров движения судна приходится прибегать к численному дифференцированию параметров, измеренных с помощью спутниковой навигационной системы, что приводит к снижению точности результатов расчета кинематических параметров движения судна. Указанный недостаток становится более существенным, если точность измерения координат носовой и кормовой точек судна по каким-либо причинам (погодные условия, район плавания и др.) снижается.
Целью предлагаемого способа является исключение отмеченного недостатка при экспериментально-расчетном определении параметров математической модели судна в непрерывном режиме и, как следствие, повышение точности прогнозирования движения судна при выполнении им маневрирования с использованием компьютерного моделирования на базе адекватной математической модели судна.
Технический результат, на достижение которого направлено заявляемое изобретение, состоит в повышении точности прогнозирования движения судна при выполнении им маневрирования.
Для достижения указанного технического результата в способе определения гидродинамических параметров математической модели судна, включающем использование математической модели движения судна, двух разнесенных по длине диаметральной плоскости судна точек носовой F и кормовой A, определение текущих значений кинематических параметров движения судна в подвижной системе координат ZXОY, связанной с судном, и на их основе вычисление текущих гидродинамических параметров математической модели движения судна, компьютерное моделирование движения судна на базе последней, используют датчики ускорений, с их помощью определяют в реальном масштабе времени текущие значения продольных, поперечных и угловых ускорений носовой F (wfx1, wfy1, ε) и кормовой A (wax1, way1, ε) точек в неподвижной системе координат X1O1Y1, на их основе определяют текущие значения кинематических параметров движения судна.
Предлагаемый способ поясняется чертежом.
Способ заключается в следующем. Математическая модель судна, используемая для компьютерного моделирования при прогнозировании движения судна в процессе маневрирования, представляет собой систему дифференциальных уравнений, общий вид которых, с учетом известных условностей [1], [2], [3], [4], [5], следующий:
где υx, υy - проекции вектора линейной скорости в ЦТ судна на продольную ОX и поперечную ОY оси соответственно;
ψ - курс судна;
X1, Y1 - координаты ЦТ судна в неподвижной системе координат X1О1Y1;
C1, С2, С3, … - параметры математической модели, численные значения которых определяют в зависимости от геометрических элементов погруженной части корпуса судна, которые постоянны при данном состоянии загрузки последнего [1], [2], [3], [4], [5].
В процессе движения судна с помощью акселерометров определяют продольные, поперечные и угловые ускорения носовой F(wfx1, wfy1, ε) и кормовой A (wax1, way1, ε) точек судна в неподвижной системе координат X1О1Y1 и рассчитывают продольные и поперечные составляющие линейных скоростей носовой (υfx1, υfy1) и кормовой (υax1, υay1) точек с использованием известных зависимостей:

Далее рассчитывают продольные и поперечные составляющие линейных скоростей носовой F (υfx, υfy) и кормовой A (υax, υay) точек судна в подвижной системе координат ZXОY, связанной с судном, с учетом воздействия на судно течения в районе маневрирования:

где υst - скорость течения;
qst - направление течения.
Очевидно, что продольная составляющая линейной скорости судна в любой заданной точке, расположенной на ДП, будет иметь одно значение, следовательно, можно считать, что

Используя значения абсциссы носовой точки F в системе координат ZXОY (xf) и абсциссы кормовой точки A в той же системе координат (xa), а также поперечные составляющие линейных скоростей в носовой (υfy) и кормовой (υay) точках, определенных с использованием зависимостей (3), рассчитывают абсциссу центра вращения судна (см. чертеж) xo [1], [2], [3], [4], [5] по формуле:

Поперечную составляющую линейной скорости в ЦТ судна определяют по формуле, полученной по чертежу, а именно:

Угловую скорость судна

Текущие значения коэффициентов C1, C2, C3, … рассчитывают в зависимости от геометрических элементов погруженной части корпуса судна, которые постоянны при данном состоянии загрузки последнего [1], [2], [3], [4], [5].
Таким образом, определяют все гидродинамические параметры математической модели судна, входящие в правые части дифференциальных уравнений (1). Вычислив правые части уравнений (1), можно в любой заданный момент времени рассчитать значения параметров, характеризующих движение судна при выполнении маневрирования, а именно υx, υy, ω, ψ, X1, Y1, что позволяет прогнозировать любой маневр до его выполнения с использованием методов компьютерного моделирования.
Литература
1. Басин A.M. Ходкость и управляемость судов / A.M. Басин. - М.
2. Васильев А.В. Управляемость судов: учеб. пособие / А.В.Васильев. - Л.: Судостроение, 1989. - 328 с.
3. Гофман А.Д. Движительно-рулевой комплекс и маневрирование судна: справочник / А.Д. Гофман. - Л.: Судостроение, 1988. - 360 с.
4. Соболев Г.В. Управляемость корабля и автоматизация судовождения / Г.В. Соболев. - Л.: Судостроение, 1976. - 478 с.
5. Справочник по теории корабля. В 3 т. Т.3: Управляемость водоизмещающих судов. Гидродинамика судов с динамическими принципами поддержания / под ред. Я.И. Войткунского. - Л.: Судостроение, 1985. - 544 с.
Способ управления движущимся судном
Способ управления движением буксирной системы
Способ управления движущимся судном
Способ управления судном при выполнении им швартовной операции к борту судна-партнера, лежащего в дрейфе
Способ управления движущимся судном
Способ управления судном при выполнении им швартовной операции к борту судна партнера, стоящего на якоре
Способ определения поперечной гидродинамической силы, образующейся на корпусе судна при выполнении сложного маневрирования
Способ управления движением судна по заданной траектории
Технологическая жидкость для перфорации и глушения нефтяных скважин
Паштет из сайки с тыквой
Способ дистанционного измерения температуры среды

