Результат интеллектуальной деятельности: ЭЛЕКТРОПРИВОД РОБОТА
Вид РИД
Изобретение
Изобретение относится к робототехнике и может быть использовано при создании электроприводов роботов.
Известно устройство для управления приводом робота, содержащее последовательно соединенные первый сумматор, первый вход которого является входом устройства, второй сумматор, первый блок умножения, третий сумматор, усилитель и электродвигатель, связанный непосредственно с первым датчиком скорости и через редуктор - с первым датчиком положения, выход которого подключен к второму входу первого сумматора, последовательно подключенные второй датчик скорости, второй блок умножения, третий блок умножения и четвертый сумматор, второй вход которого соединен с вторым входом второго сумматора и выходом первого датчика скорости, третий вход - с выходом релейного элемента, подключенного входом к второму входу третьего блока умножения и выходу первого датчика скорости, а выход - со вторым входом третьего сумматора, последовательно соединенные датчик массы и пятый сумматор, второй вход которого подключен к выходу первого задатчика сигнала, а выход - к второму входу первого блока умножения, последовательно соединенные второй датчик положения, первый косинусный функциональный преобразователь, четвертый блок умножения, шестой сумматор, второй вход которого подключен к выходу второго задатчика сигнала, пятый блок умножения, второй вход которого соединен с выходом первого датчика ускорения, а выход - с четвертым входом четвертого сумматора, последовательно соединенные третий задатчик сигнала, седьмой сумматор, второй вход которого подключен к выходу датчика массы, и шестой блок умножения, второй вход которого через второй синусный функциональный преобразователь подключен к выходу второго датчика положения, а выход - к второму входу второго блока умножения, причем второй вход четвертого блока умножения соединен с выходом седьмого сумматора, его выход - с третьим входом пятого сумматора, пятый вход четвертого сумматора через седьмой блок умножения, второй вход которого соединен с выходом второго блока умножения, подключен к выходу второго датчика скорости, последовательно соединенные четвертый задатчик сигнала, восьмой сумматор, второй вход которого подключен к выходу датчика массы и третьему входу шестого сумматора, и восьмой блок умножения, второй вход которого через третий синусный функциональный преобразователь соединен с выходом первого датчика положения, а также последовательно соединенные девятый сумматор, первый и второй входы которого подключены соответственно к выходам первого и второго датчиков положения, четвертый синусный функциональный преобразователь и девятый блок умножения, второй вход которого подключен к выходу седьмого сумматора, десятый сумматор, второй вход которого подключен к выходу восьмого блока умножения и десятый блок умножения, второй вход которого соединен с выходом второго датчика ускорения, а выход - с шестым входом четвертого сумматора, последовательно соединенные пятый косинусный функциональный преобразователь, вход которого подключен к выходу первого датчика положения, одиннадцатый блок умножения, второй вход которого подключен к выходу восьмого сумматора, одиннадцатый сумматор, второй вход которого через последовательно соединенные шестой косинусный функциональный преобразователь и двенадцатый блок умножения, второй вход которого подключен к выходу седьмого сумматора, соединен с выходом девятого сумматора, и тринадцатый блок умножения, второй вход которого подключен к выходу третьего датчика ускорения, а выход - к седьмому входу четвертого сумматора (см. патент России №2272312, Б.И. №8, 2006 г.).
Его недостатком является то, что в нем отсутствует полная инвариантность динамических свойств рассматриваемого электропривода к непрерывным изменениям его моментных нагрузочных характеристик, поскольку здесь рассматривается робот с другой кинематической схемой.
Известен также электропривод робота, содержащий последовательно соединенные первый блок умножения, первый сумматор, усилитель и электродвигатель, связанные с первым датчиком скорости непосредственно и через редуктор - с первым датчиком положения, выход которого соединен с первым входом второго сумматора, подключенного вторым входом к входу устройства, последовательно соединенные второй датчик положения, третий сумматор, второй вход которого подключен к выходу первого задатчика сигнала, четвертый сумматор, второй вход которого соединен с выходом второго задатчика сигнала, первый квадратор, второй блок умножения, второй вход которого подключен к выходу датчика массы, и пятый сумматор, второй вход которого подключен к выходу третьего задатчика сигнала, третий вход через второй квадратор - к выходу третьего сумматора, а выход - ко второму входу первого блока умножения, последовательно соединенные третий блок умножения, первый вход которого соединен с выходом датчика массы, а второй вход - с выходом четвертого сумматора, шестой сумматор, второй вход которого подключен к выходу третьего сумматора, четвертый блок умножения, второй вход которого соединен с выходом второго датчика скорости, и пятый блок умножения, седьмой сумматор, первый вход которого подключен к выходу второго сумматора, выход - к первому входу первого блока умножения, а второй вход - ко второму входу пятого блока умножения, выходу первого датчика скорости, входу релейного блока и первому входу восьмого сумматора, второй вход которого подключен к выходу релейного блока, третий вход - к выходу пятого блока умножения, а выход - ко второму входу первого сумматора, последовательно соединенные четвертый задатчик сигнала, девятый сумматор, второй вход которого соединен с выходом пятого сумматора, шестой и седьмой блоки умножения и десятый сумматор, выход которого подключен к четвертому входу восьмого сумматора, последовательно соединенные третий датчик скорости и третий квадратор, выход которого подключен ко второму входу шестого блока умножения, последовательно соединенные второй усилитель и первый синусный функциональный преобразователь, выход которого подключен к второму входу седьмого блока умножения, а также последовательно соединенные второй косинусный функциональный преобразователь, подключенный входом к выходу первого датчика положения и входу второго усилителя, и восьмой блок умножения, второй вход которого соединен с выходом шестого сумматора, а выход - со вторым входом десятого сумматора, последовательно соединенные третий датчик положения, третий косинусный функциональный преобразователь, девятый блок умножения, второй вход которого подключен к выходу шестого сумматора, десятый блок умножения, второй вход которого соединен с выходом первого датчика ускорения, и одиннадцатый блок умножения, второй вход которого через четвертый синусный функциональный преобразователь подключен к выходу первого датчика положения, а выход - к пятому входу восьмого сумматора (см. патент России №2434736. Бюл. №33, 2011 г.).
Данное устройство по своей технической сущности является наиболее близким к предлагаемому решению.
Недостатком прототипа также является то, что в нем отсутствует полная инвариантность динамических свойств рассматриваемого электропривода к непрерывным изменениям его моментных нагрузочных характеристик, поскольку в нем рассматривается робот с кинематической схемой, имеющей лишь четыре степени подвижности.
Задачей, на решение которой направлено заявляемое техническое решение, является обеспечение полной инвариантности динамических свойств рассматриваемого электропривода к непрерывным и быстрым изменениям его динамических моментных нагрузочных характеристик при движении конкретного робота с заданной кинематической схемой исполнительного органа по всем его пяти степеням подвижности.
Технический результат, который может быть получен при реализации заявляемого технического решения, выражается в формировании дополнительного сигнала управления, подаваемого на вход электропривода, который обеспечивает формирование моментного воздействия, необходимого для обеспечения полной инвариантности его показателей качества к непрерывно изменяющимся параметрам нагрузки.
Поставленная задача решается тем, что в электропривод робота, содержащий последовательно соединенные первый блок умножения, первый сумматор, усилитель и электродвигатель, связанные с первым датчиком скорости непосредственно и через редуктор - с первым датчиком положения, выход которого соединен с первым входом второго сумматора, подключенного вторым входом к входу устройства, последовательно соединенные второй датчик положения, третий сумматор, второй вход которого подключен к выходу первого задатчика сигнала, четвертый сумматор, второй вход которого соединен с выходом второго задатчика сигнала, первый квадратор, второй блок умножения, второй вход которого подключен к выходу датчика массы, и пятый сумматор, второй вход которого подключен к выходу третьего задатчика сигнала, третий вход через второй квадратор - к выходу третьего сумматора, а выход - ко второму входу первого блока умножения, последовательно соединенные третий блок умножения, первый вход которого соединен с выходом датчика массы, а второй вход - с выходом четвертого сумматора, шестой сумматор, второй вход которого подключен к выходу третьего сумматора, четвертый блок умножения, второй вход которого соединен с выходом второго датчика скорости, и пятый блок умножения, седьмой сумматор, первый вход которого подключен к выходу второго сумматора, выход - к первому входу первого блока умножения, а второй вход - ко второму входу пятого блока умножения, выходу первого датчика скорости, входу релейного блока и первому входу восьмого сумматора, второй вход которого подключен к выходу релейного блока, третий вход - к выходу пятого блока умножения, а выход - ко второму входу первого сумматора, последовательно соединенные четвертый задатчик сигнала, девятый сумматор, второй вход которого соединен с выходом пятого сумматора, шестой и седьмой блоки умножения и десятый сумматор, выход которого подключен к четвертому входу восьмого сумматора, последовательно соединенные третий датчик скорости и третий квадратор, выход которого подключен ко второму входу шестого блока умножения, последовательно соединенные второй усилитель и первый синусный функциональный преобразователь, выход которого подключен к второму входу седьмого блока умножения, а также последовательно соединенные второй косинусный функциональный преобразователь, подключенный входом к выходу первого датчика положения и входу второго усилителя, и восьмой блок умножения, второй вход которого соединен с выходом шестого сумматора, а выход - со вторым входом десятого сумматора, последовательно соединенные третий датчик положения, третий косинусный функциональный преобразователь, девятый блок умножения, второй вход которого подключен к выходу шестого сумматора, десятый блок умножения, второй вход которого соединен с выходом первого датчика ускорения, а также одиннадцатый блок умножения, второй вход которого через четвертый синусный функциональный преобразователь, подключен к выходу первого датчика положения, а выход - к пятому входу восьмого сумматора, дополнительно вводятся последовательно соединенные пятый синусный функциональный преобразователь, подключенный входом к выходу третьего датчика положения, двенадцатый блок умножения, второй вход которого подключен к выходу шестого сумматора, тринадцатый блок умножения, второй вход которого соединен с выходом второго датчика ускорения, и одиннадцатый сумматор, второй вход которого соединен с выходом десятого блока умножения, а выход - с первым входом одиннадцатого блока умножения.
Сопоставительный анализ существенных признаков предлагаемого технического решения с существенными признаками аналога и прототипа свидетельствуют о его соответствии критерию «новизна».
При этом отличительные признаки формулы изобретения обеспечивают высокую точность и устойчивость работы электропривода рассматриваемого робота в условиях существенного изменения его параметров нагрузки.
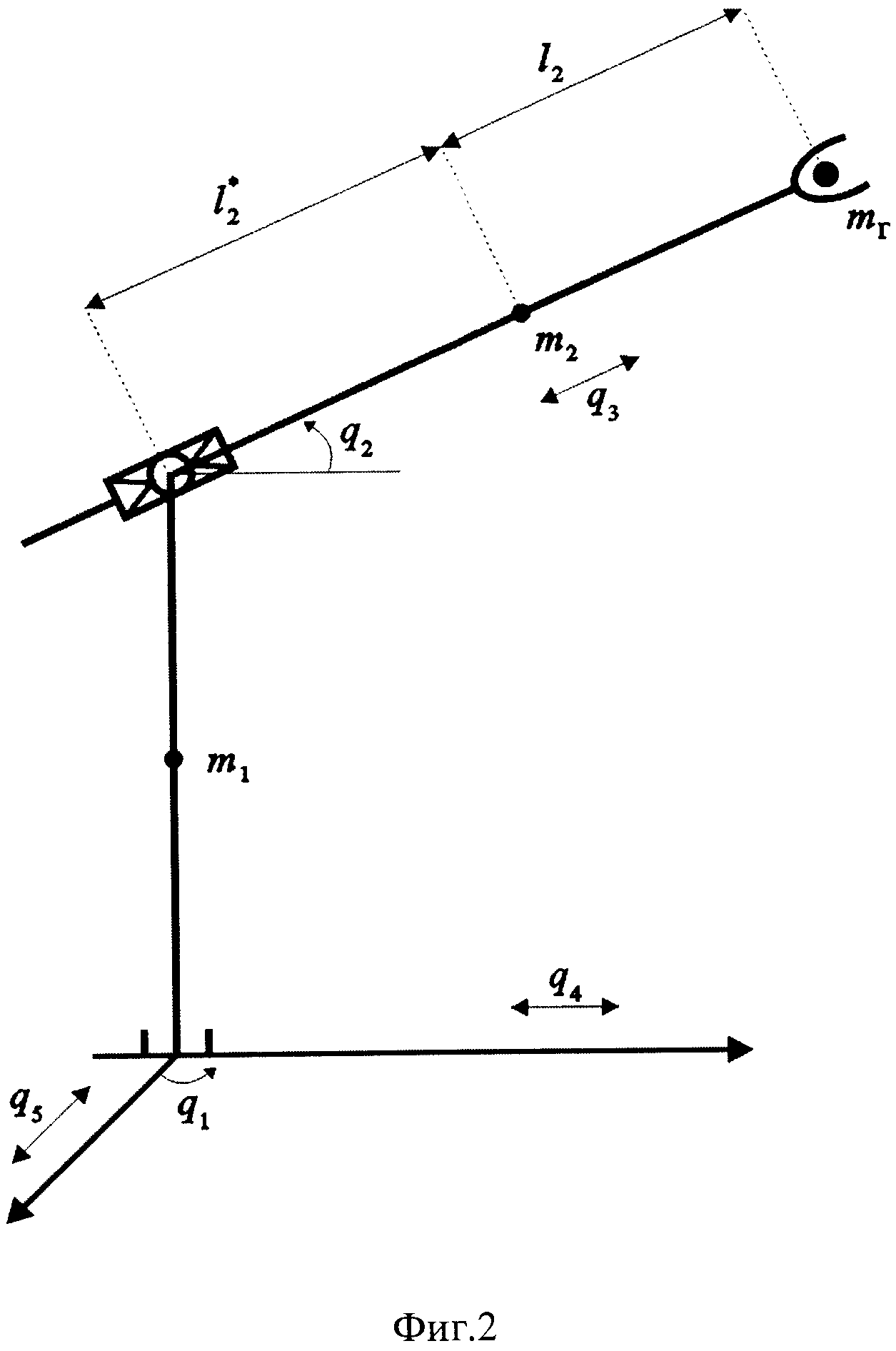
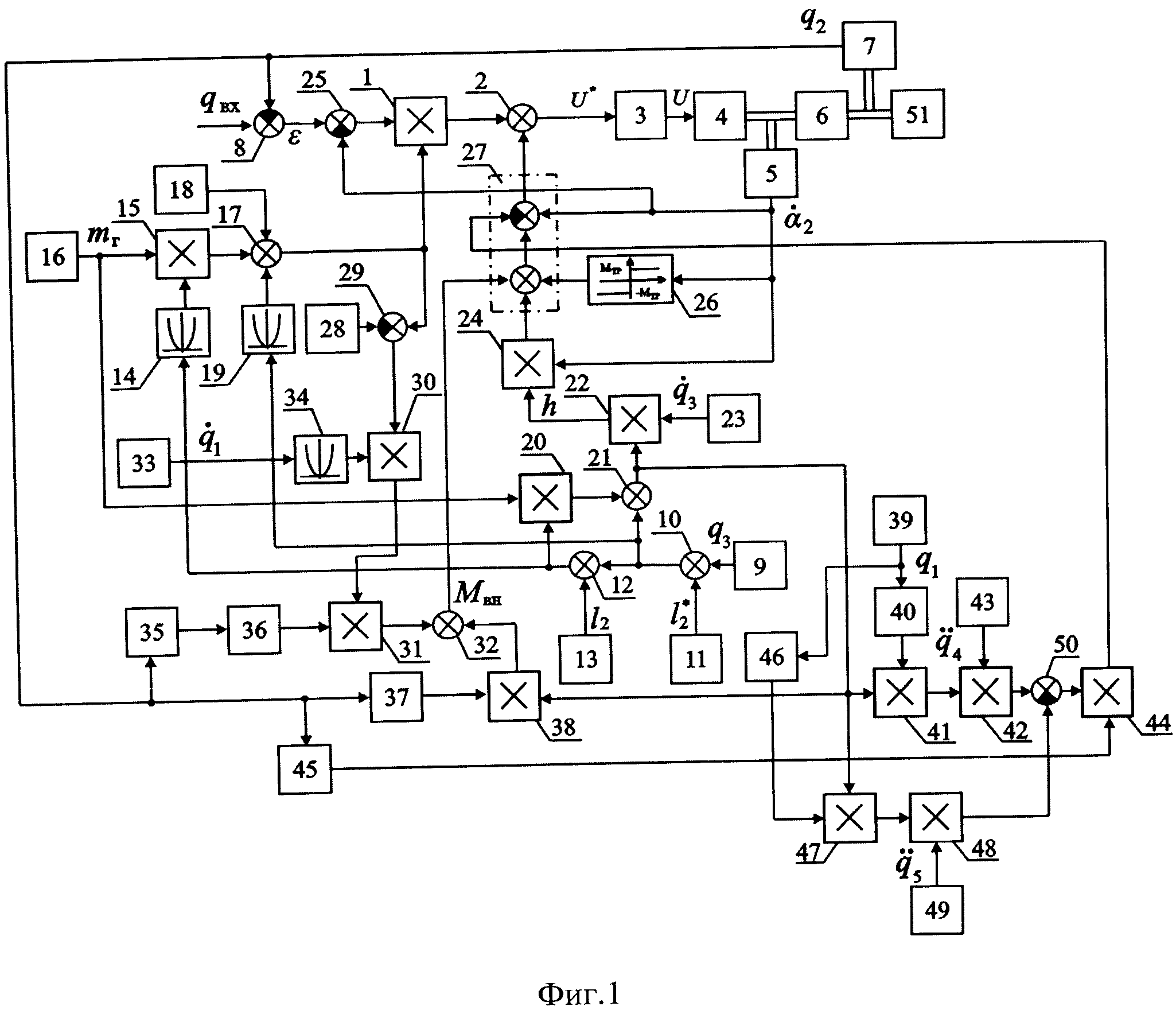
На фиг.1 дана блок-схема предлагаемого электропривода робота, а на фиг.2 - кинематическая схема его исполнительного органа.
Электропривод робота содержит последовательно соединенные первый блок 1 умножения, первый сумматор 2, усилитель 3 и электродвигатель 4, связанные с первым датчиком 5 скорости непосредственно и через редуктор 6 - с первым датчиком 7 положения, выход которого соединен с первым входом второго сумматора 8, подключенного вторым входом к входу устройства, последовательно соединенные второй датчик 9 положения, третий сумматор 10, второй вход которого подключен к выходу первого задатчика 11 сигнала, четвертый сумматор 12, второй вход которого соединен с выходом второго задатчика 13 сигнала, первый квадратор 14, второй блок 15 умножения, второй вход которого подключен к выходу датчика 16 массы, и пятый сумматор 17, второй вход которого подключен к выходу третьего задатчика 18 сигнала, третий вход через второй квадратор 19 - к выходу третьего сумматора 10, а выход - ко второму входу первого блока 1 умножения, последовательно соединенные третий блок 20 умножения, первый вход которого соединен с выходом датчика 16 массы, а второй вход - с выходом четвертого сумматора 12, шестой сумматор 21, второй вход которого подключен к выходу третьего сумматора 10, четвертый блок 22 умножения, второй вход которого соединен с выходом второго датчика 23 скорости, и пятый блок 24 умножения, седьмой сумматор 25, первый вход которого подключен к выходу второго сумматора 8, выход - к первому входу первого блока 1 умножения, а второй вход - ко второму входу пятого блока 24 умножения, выходу первого датчика 5 скорости, входу релейного блока 26 и первому входу восьмого сумматора 27, второй вход которого подключен к выходу релейного блока 26, третий вход - к выходу пятого блока 24 умножения, а выход - ко второму входу первого сумматора 2, последовательно соединенные четвертый задатчик 28 сигнала, девятый сумматор 29, второй вход которого соединен с выходом пятого сумматора 17, шестой 30 и седьмой 31 блоки умножения и десятый сумматор 32, выход которого подключен к четвертому входу восьмого сумматора 27, последовательно соединенные третий датчик 33 скорости и третий квадратор 34, выход которого подключен ко второму входу шестого блока 30 умножения, последовательно соединенные второй усилитель 35 и первый синусный функциональный преобразователь 36, выход которого подключен к второму входу седьмого блока 31 умножения, а также последовательно соединенные второй косинусный функциональный преобразователь 37, подключенный входом к выходу первого датчика 7 положения и входу второго усилителя 35, и восьмой блок 38 умножения, второй вход которого соединен с выходом шестого сумматора 21, а выход - со вторым входом десятого сумматора 32, последовательно соединенные третий датчик 39 положения, третий косинусный функциональный преобразователь 40, девятый блок 41 умножения, второй вход которого подключен к выходу шестого сумматора 21, десятый блок 42 умножения, второй вход которого соединен с выходом первого датчика 43 ускорения, а также одиннадцатый блок 44 умножения, второй вход которого через четвертый синусный функциональный преобразователь 45 подключен к выходу первого датчика 7 положения, а выход - к пятому входу восьмого сумматора 27, последовательно соединенные пятый синусный функциональный преобразователь 46, подключенный входом к выходу третьего датчика 39 положения, двенадцатый блок 47 умножения, второй вход которого подключен к выходу шестого сумматора 21, тринадцатый блок 48 умножения, второй вход которого соединен с выходом второго датчика 49 ускорения, и одиннадцатый сумматор 50, второй вход которого соединен с выходом десятого блока 42 умножения, а выход - с первым входом одиннадцатого блока 44 умножения. Объект управления 51.
На фиг.1 и фиг.2 введены следующие обозначения: qВХ - сигнал с выхода программного устройства; ε - сигнал ошибки привода; U*, U - соответственно усиливаемый сигнал и сигнал управления электродвигателем 4; q1, q2, q3, q4, q5 - соответствующие обобщенные координаты исполнительного органа робота;  ,
,  - скорости изменения соответствующих обобщенных координат;
- скорости изменения соответствующих обобщенных координат;  - скорость вращения ротора электродвигателя;
- скорость вращения ротора электродвигателя;  ,
,  - ускорение четвертой обобщенной координаты; m1, m2, mГ - соответственно массы первого, второго звеньев исполнительного органа и захваченного груза;
- ускорение четвертой обобщенной координаты; m1, m2, mГ - соответственно массы первого, второго звеньев исполнительного органа и захваченного груза;  - расстояние от оси вращения второго звена до его центра масс при q3=0; l2 - расстояние от центра масс второго звена до средней точки схвата.
- расстояние от оси вращения второго звена до его центра масс при q3=0; l2 - расстояние от центра масс второго звена до средней точки схвата.
В изобретении рассматривается электропривод, который обеспечивает вращение относительно горизонтальной оси (координата q2) звена исполнительного органа робота (см. фиг.2).
Устройство работает следующим образом. На вход электропривода подается управляющее воздействие qВХ, обеспечивающее требуемый закон его управления. При этом на выходе сумматора 8 вырабатывается сигнал ошибки ε, который после коррекции в блоках 1, 2, 25, усиливаясь, поступает на электродвигатель 4, приводя его вал во вращательное движение с направлением и скоростью (ускорением), зависящими от величины поступающего сигнала ε, моментов трения и внешнего моментного воздействия MВ.
Рассматриваемый электропривод при работе с различными грузами, а также за счет взаимовлияния степеней подвижности исполнительного органа обладает переменными моментными характеристиками, которые могут меняться в широких пределах. Это снижает качественные показатели работы электропривода и даже приводит к потере его устойчивости. Моментные характеристики электропривода зависят от изменения координат q1, q2, q3,  ,
,  ,
,  ,
,  , mГ. В связи с этим для качественного управления координатой q2 необходимо точно компенсировать отрицательное влияние изменения координат q1, q2, q3,
,
,
,
, а также переменной массы груза mГ на динамические свойства рассматриваемого электропривода.
, mГ. В связи с этим для качественного управления координатой q2 необходимо точно компенсировать отрицательное влияние изменения координат q1, q2, q3,
,
,
,
, а также переменной массы груза mГ на динамические свойства рассматриваемого электропривода.
Датчики 39, 7 и 9 установлены соответственно в первой, второй и третьей степенях подвижности исполнительного органа (см. фиг.2) и измеряют величины q1, q2 и q3 соответственно. Датчики 33, 5 и 23 также установлены соответственно в первой, второй и третьей степенях подвижности исполнительного органа (см. фиг.2) и измеряют величины  ,
и
,
и  соответственно, а датчики 43 и 49 - в четвертой и пятой степенях подвижности исполнительного органа и измеряют величины
,
соответственно.
соответственно, а датчики 43 и 49 - в четвертой и пятой степенях подвижности исполнительного органа и измеряют величины
,
соответственно.
Первый положительный вход сумматора 25 (со стороны сумматора 8) имеет единичный коэффициент усиления, а его второй отрицательный вход - коэффициент усиления Kω/Ky. В результате на выходе сумматора 25 формируется сигнал  .
.
Положительные входы сумматоров 10 и 12 имеют единичные коэффициенты усиления. Задатчик 11 вырабатывает сигнал  , а задатчик 13 - сигнал l2. В результате на выходе сумматора 10 формируется сигнал
, а задатчик 13 - сигнал l2. В результате на выходе сумматора 10 формируется сигнал  , на выходе сумматора 12 - сигнал
, на выходе сумматора 12 - сигнал  , на выходе блока 15 - сигнал
, на выходе блока 15 - сигнал  , а на выходе квадратора 19 - сигнал
, а на выходе квадратора 19 - сигнал  .
.
С выхода задатчика 18 на второй положительный вход сумматора 17, имеющий единичный коэффициент усиления, поступает сигнал, равный  , где J - момент инерции якоря электродвигателя и вращающихся частей редуктора, приведенных к валу электродвигателя; JN2 - момент инерции второго звена исполнительного органа робота относительно поперечной оси, проходящей через его центр масс, a ip - передаточное отношение редуктора 6. Поскольку первый (со стороны блока 15) и третий (со стороны квадратора 19) положительные входы этого сумматора соответственно имеют единичный коэффициент усиления и коэффициент усиления, равный m2, то на его выходе формируется сигнал
, где J - момент инерции якоря электродвигателя и вращающихся частей редуктора, приведенных к валу электродвигателя; JN2 - момент инерции второго звена исполнительного органа робота относительно поперечной оси, проходящей через его центр масс, a ip - передаточное отношение редуктора 6. Поскольку первый (со стороны блока 15) и третий (со стороны квадратора 19) положительные входы этого сумматора соответственно имеют единичный коэффициент усиления и коэффициент усиления, равный m2, то на его выходе формируется сигнал
 ,
,
а на выходе блока l - сигнал
 .
.
На выходе блока 20 формируется сигнал  . Второй положительный вход сумматора 21 (со стороны сумматора 10) имеет коэффициент усиления 2m3, а его первый положительный вход -коэффициент усиления 2. В результате на выходе блока 22 формируется сигнал
. Второй положительный вход сумматора 21 (со стороны сумматора 10) имеет коэффициент усиления 2m3, а его первый положительный вход -коэффициент усиления 2. В результате на выходе блока 22 формируется сигнал  , а на выходе блока 24 - сигнал
, а на выходе блока 24 - сигнал  .
.
Поскольку на выходе сумматора 21 формируется сигнал  , то на выходе блока 38 появится сигнал
, то на выходе блока 38 появится сигнал  , а на выходе блока 44 - сигнал
, а на выходе блока 44 - сигнал  так как первый отрицательный (со стороны блока 48) и второй положительный входы сумматора 50 имеют единичные коэффициенты усиления.
так как первый отрицательный (со стороны блока 48) и второй положительный входы сумматора 50 имеют единичные коэффициенты усиления.
Задатчик 28 вырабатывает сигнал  , где Js2 - момент инерции второго звена исполнительного органа относительно его продольной оси. Первый отрицательный (со стороны задатчика 28) и второй положительный входы сумматора 29 имеют единичные коэффициенты усиления. В результате на его выходе формируется сигнал
, где Js2 - момент инерции второго звена исполнительного органа относительно его продольной оси. Первый отрицательный (со стороны задатчика 28) и второй положительный входы сумматора 29 имеют единичные коэффициенты усиления. В результате на его выходе формируется сигнал
 .
.
Усилитель 35 имеет коэффициент усиления 2. В результате на выходе блока 31 формируется сигнал
 .
.
Первый положительный вход сумматора 32 (со стороны блока 31) имеет единичный коэффициент усиления, а его второй положительный вход - коэффициент усиления g/2, где g - ускорение свободного падения. В результате на выходе этого сумматора формируется сигнал

Выходной сигнал релейного блока 26 имеет вид
где МT - величина момента сухого трения при движении.
Первый (со стороны датчика 5), второй (со стороны блока 26), третий (со стороны блока 24), четвертый (со стороны сумматора 32) положительные и пятый отрицательный входы сумматора 27 имеют коэффициенты усиления:  , единичный,
, единичный,  ,
,  ,
,  соответственно, где R - активное сопротивление якорной цепи электродвигателя, KM - коэффициент крутящего момента, Kω - коэффициент противоЭДС, KB - коэффициент вязкого трения. В результате на выходе сумматора 27 формируется сигнал
соответственно, где R - активное сопротивление якорной цепи электродвигателя, KM - коэффициент крутящего момента, Kω - коэффициент противоЭДС, KB - коэффициент вязкого трения. В результате на выходе сумматора 27 формируется сигнал
 .
.
Первый (со стороны блока 1) и второй положительные входы сумматора 2 имеют коэффициенты усиления  , R/(KMKy) соответственно, где Ky - коэффициент усиления усилителя 3, JH - номинальное значение момента инерции, приведенного к валу электродвигателя. В результате на выходе этого сумматора формируется сигнал
, R/(KMKy) соответственно, где Ky - коэффициент усиления усилителя 3, JH - номинальное значение момента инерции, приведенного к валу электродвигателя. В результате на выходе этого сумматора формируется сигнал

Ha основе уравнений Лагранжа II рода с учетом уже введенных обозначений можно записать моментное воздействие на выходной вал электропривода, управляющего координатой q2, при движении исполнительного органа робота (см. фиг.2) с грузом в виде

С учетом соотношения (2), а также уравнений электрической  и механической
и механической  цепей электродвигателя 4 постоянного тока с постоянными магнитами или независимого возбуждения рассматриваемый электропривод, управляющий координатой q2, можно описать дифференциальным уравнением
цепей электродвигателя 4 постоянного тока с постоянными магнитами или независимого возбуждения рассматриваемый электропривод, управляющий координатой q2, можно описать дифференциальным уравнением

где MСТР - момент сухого трения на валу электродвигателя; i - ток якоря.
Из формулы (3) видно, что параметры этого уравнения, а следовательно, и параметры электропривода, управляющего координатой q2, являются существенно переменными, зависящими от величин q1, q2, q3,
,
,
,
, mГ. В результате в процессе работы указанного электропривода меняются (и притом существенно) его динамические свойства. Таким образом, для реализации поставленной задачи необходимо сформировать такое корректирующее устройство, которое застабилизировало бы параметры этого электропривода так, чтобы он описывался дифференциальным уравнением с постоянными желаемыми параметрами.
Поскольку при движении электропривода  достаточно точно соответствует МСТР, то сигнал (1), как несложно убедиться, обеспечивает превращение уравнения (3) с существенно переменными параметрами в уравнение
достаточно точно соответствует МСТР, то сигнал (1), как несложно убедиться, обеспечивает превращение уравнения (3) с существенно переменными параметрами в уравнение  с постоянными параметрами, обеспечивающими электроприводу заданные динамические свойства и показатели качества за счет соответствующего выбора величин JH и Ky.
с постоянными параметрами, обеспечивающими электроприводу заданные динамические свойства и показатели качества за счет соответствующего выбора величин JH и Ky.
Опорный подшипниковый узел
Способ подводного массажа
Способ производства йогурта
Самонастраивающийся электропривод манипулятора
Способ работы системы теплоснабжения
Котел водогрейный прямоугольного поперечного сечения
Топка водогрейного котла
Судовое рулевое устройство
Полуфабрикат мясорастительный рубленый
Состав для производства шоколада
Состав для приготовления хлеба из пшеничной муки
Самонастраивающийся электропривод
Самонастраивающийся электропривод
Способ дезактивации радиоактивных отходов
Способ получения октагалактуронида
Способ получения гептагалактуронида
Водогрейный котел
Конвективный блок водогрейного котла
Котел водогрейный прямоугольного поперечного сечения
Способ оценки здоровья морских двустворчатых моллюсков и состояния среды их обитания

