Результат интеллектуальной деятельности: СПОСОБ РАСЧЕТА МАССОВО-ГЕОМЕТРИЧЕСКИХ И НАГРУЗОЧНЫХ ПАРАМЕТРОВ ТРАНСПОРТНОГО СРЕДСТВА СПЕЦИАЛЬНОГО НАЗНАЧЕНИЯ
Вид РИД
Изобретение
Изобретение относится к области транспортного машиностроения и может быть использовано для определения массово-геометрических и динамических параметров транспортных средств специального назначения, оснащенных кузовом - фургоном и имеющих сложную пространственную схему размещения оборудования и аппаратных средств.
Известен метод определения момента инерции и координат центра масс механической системы через координаты центров масс отдельных элементов, входящих в ее состав (см. Тарг С.М. Краткий курс теоретической механики: Учебник для втузов. - 10-е изд., перераб. и доп. - М.: Высш. шк., 1986, 264-265 с.), принятый за прототип. Согласно данному методу координаты геометрической точки, называемой центром масс, определяются как отношение суммы произведений масс элементов системы на их координаты к массе системы.
Недостатками способа, принятого за прототип, являются:
- необходимость полного пересчета координат центра масс при изменении компоновочных решений по размещению оборудования и аппаратных средств;
- недостаточное количество определяемых параметров для реальных систем, в частности для транспортных средств специального назначения, передвигающихся по дорогам различного типа.
Предлагаемым изобретением решается задача по повышению эффективности и точности расчетных методов определения массово-геометрических и нагрузочных параметров при проектировании транспортных средств специального назначения по общему снижению затрат на их создание.
Технический результат, получаемый при осуществлении изобретения, заключается в формировании способа расчета массово-геометрических и нагрузочных параметров транспортного средства специального назначения, который позволяет определить массу и координаты центра масс полностью снаряженного автомобиля, оборудования с экипажем и шасси с кузовом - фургоном, нагрузки по осям и бортам транспортного средства, в т.ч. с использованием программных средств вычислительной техники.
Указанный технический результат достигается тем, что в предлагаемом способе расчета массово-геометрических и нагрузочных параметров транспортного средства специального назначения, заключающемся в том, что координаты центра масс системы (транспортного средства) определяются через координаты центров масс отдельных элементов системы, входящих в ее состав, как отношение суммы произведений масс элементов системы на их координаты к полной массе системы, новым является то, что на первоначальном этапе принимается система координат транспортного средства, на втором этапе определяются масса и координаты центра масс оборудования и аппаратных средств с экипажем, на третьем этапе определяются координаты центра масс транспортного средства, оборудованного кузовом-фургоном, на четвертом этапе определяются масса и координаты центра масс полностью снаряженного транспортного средства, на пятом этапе определяется распределение нагрузки на переднюю, заднюю оси и борта транспортного средства, для чего силы, распределенные по длине транспортного средства, заменяются на сосредоточенные, приложенные соответственно к серединам колес и бортам, на шестом этапе определяется продольная и поперечная устойчивость транспортного средства без учета деформации рессор и шин, на седьмом этапе определяются допустимые нагрузки на элементы кузова-фургона: пол, борта, заднюю и переднюю панели, крышу, на восьмом этапе проводится анализ полученных результатов и при необходимости производится перекомпоновка оборудования и аппаратных средств с дальнейшим перерасчетом.
Принятие на первоначальном этапе системы координат транспортного средства позволяет определить точку начала координат, наиболее удобную для проведения дальнейших расчетов.
Определение на втором этапе массы и координат центра масс оборудования и аппаратных средств с экипажем позволяет:
- определить обобщенные массовые характеристики оборудования, аппаратных средств и членов экипажа (командира, механика-водителя и двух операторов);
- определить обобщенные координаты центра масс оборудования, аппаратных средств и членов экипажа.
Определение на третьем этапе координат центра масс транспортного средства, оборудованного кузовом-фургоном, позволяет преобразовать координаты центра масс транспортного средства, взятые из его сопроводительной документации, к принятой на первоначальном этапе системе координат.
Определение на четвертом этапе массы и координат центра масс полностью снаряженного транспортного средства позволяет получить окончательные данные для проведения расчетов нагрузочных характеристик.
Определение на пятом этапе схемы распределения нагрузки на переднюю, заднюю оси и борта транспортного средства, для чего силы, распределенные по длине транспортного средства, заменяются на сосредоточенные, приложенные соответственно к серединам колес и бортам, позволяет:
- определить соответствие полученных при расчете нагрузок на переднюю и заднюю оси транспортного средства допустимым нагрузкам;
- определить перевес (разницу нагрузок на оси и борта).
Определение на шестом этапе продольной и поперечной устойчивости транспортного средства позволяет:
- определить предельное значение переднего и заднего углов свеса транспортного средства;
- определить предельное значение поперечной устойчивости транспортного транспортного средства.
Определение на седьмом этапе допустимых нагрузок на элементы кузова-фургона: пол, борта, заднюю и переднюю панели, крышу позволяет провести компоновку оборудования и аппаратных средств, не допуская перегрузки на отдельные элементы кузова-фургона.
Проведение на восьмом этапе анализа полученных результатов позволяет определить необходимость изменения компоновочных решений с целью оптимизации распределения нагрузок на элементы кузова-фургона.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
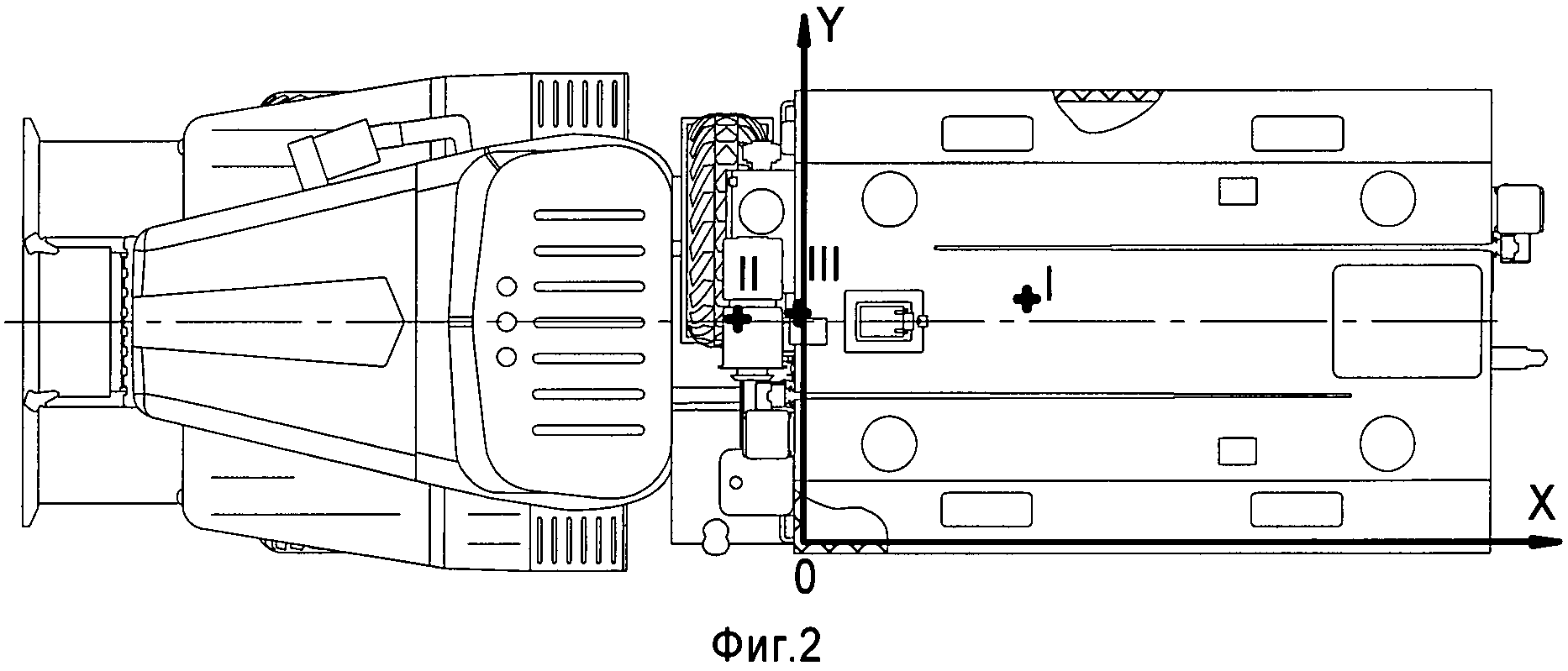
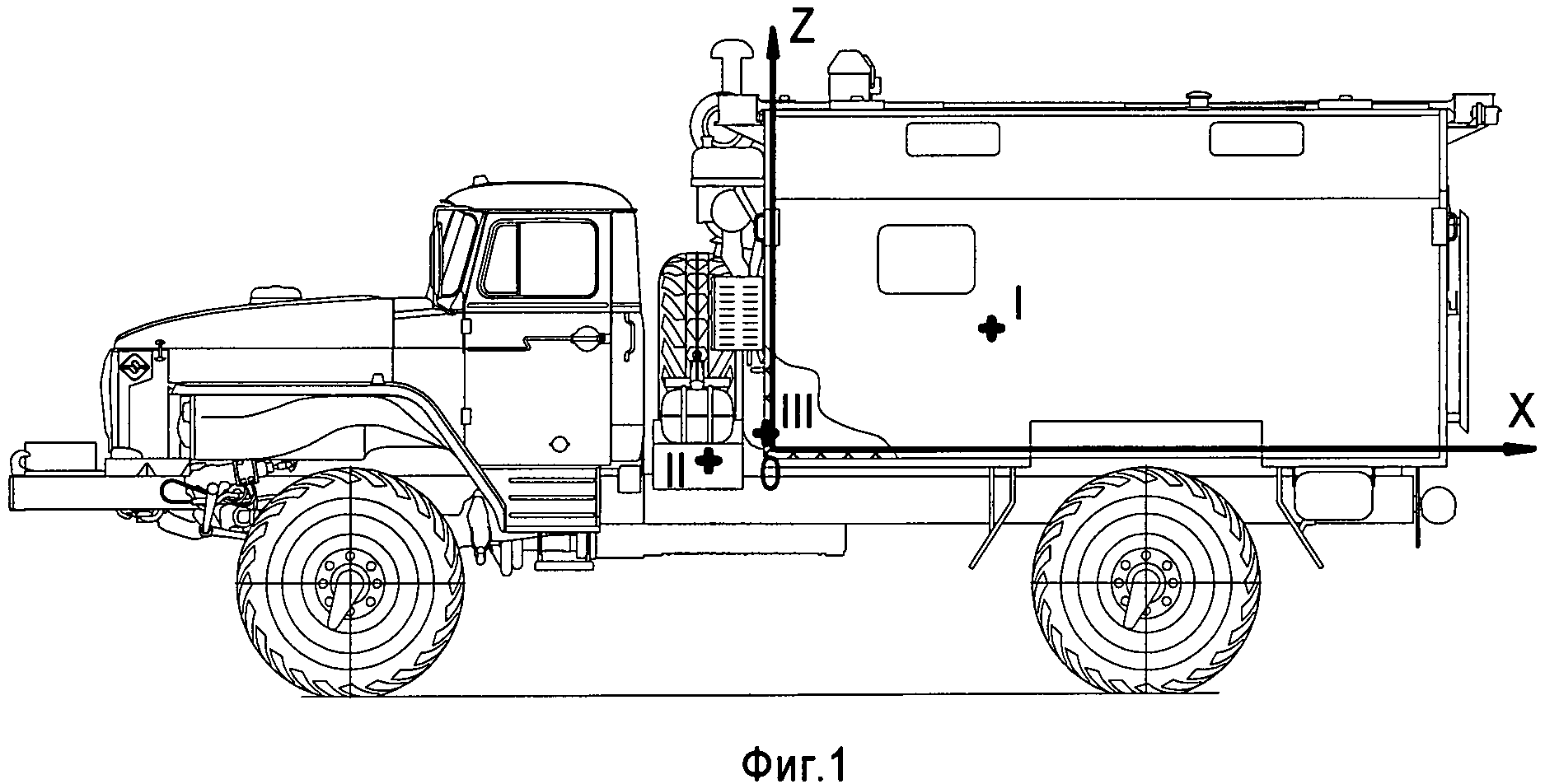
Сущность изобретения поясняется чертежами, где на фиг.1 и фиг.2 показана схема положения центров масс транспортного средства; на фиг.3 - задний угол свеса транспортного средства; на фиг.4 - передний угол свеса транспортного средства; на фиг.5 - поперечная устойчивость транспортного средства; на фиг.6 - схема распределения нагрузок на переднюю и заднюю оси транспортного средства; на фиг.7 - схема распределения нагрузок по бортам транспортного средства.
Способ расчета массово-геометрических и нагрузочных параметров транспортного средства специального назначения реализуется следующим образом.
На первоначальном этапе принимается система координат транспортного средства. За начало координат рассматриваемой системы в виде транспортного средства специального назначения принята крайняя передняя точка левой панели кузова-фургона изнутри. Координата Х - по длине кузова в направлении, обратном движению транспортного средства. Координата Y - по ширине кузова вправо по ходу транспортного средства. Координата Z - по высоте кузова от пола вверх.
На втором этапе определяются масса и координаты центра масс оборудования и аппаратных средств с экипажем.
Общая масса оборудования и аппаратных средств с экипажем ΣGобщI:
ΣGобщI=G1+G2+…+Gi,
где G - масса единицы оборудования (члена экипажа);
i - количество оборудования и членов экипажа.
Координаты центра масс оборудования и аппаратных средств с экипажем XI, YI, ZI (см. точку I на фиг.1 и фиг.2):
XI=ΣSXI/GобщI,
YI=ΣSYI/GобщI,
ZI=ΣSZI/GобщI,
где S=G·j - статический момент;
j - обобщенная координата центра масс.
На третьем этапе определяются координаты центра масс транспортного средства, оборудованного кузовом-фургоном. Для этого координаты центра масс транспортного средства преобразуются к принятой на первом этапе системе координат. Координаты центра масс, масса шасси и кузова - фургона известны из технической документации на них.
Общая масса транспортного средства ΣGобщII:
ΣGобщII=Gш+Gк,
где Gш - масса шасси;
Gк - масса кузова - фургона.
Преобразованные координаты XII, YII, ZII (см. точку II на фиг.1 и фиг.2):
XII=ΣSXII/GобщII,
YII=ΣSYII/GобщII,
ZII=ΣSZII/GобщII.
На четвертом этапе определяются масса и координаты центра масс полностью снаряженного транспортного средства.
Общая масса полностью снаряженного транспортного средства ΣGобщIII:
ΣGобщIII=ΣGобщI+ΣGобщII,
Координаты центра масс полностью снаряженного транспортного средства XIII, YIII, ZIII (см. точку III на фиг.1 и фиг.2):
XIII=(ΣSXI+ΣSXII)/GобщIII,
YIII=(ΣSYI+ΣSYII)/GобщIII,
ZIII=(ΣSZI+ΣSZII)/GобщIII.
На пятом этапе определяется распределение нагрузки на переднюю, заднюю оси и борта транспортного средства, для чего силы, распределенные по длине транспортного средства, заменяются на сосредоточенные, приложенные соответственно к серединам колес и бортам.
Нагрузка Рпер, действующая на передний мост (см. фиг.6):
Рпер=(Робщ·(L-L1))/L,
где Робщ - общая нагрузка;
L - расстояние между задней и передней осями;
L1 - расстояние от передней оси до центра масс полностью снаряженного транспортного средства.
Нагрузка Рзад, действующая на задний мост:
Pзад=Pобщ-Pпер
Полученные значения нагрузок Рзад, Рпер сравниваются с допустимыми значениями для конкретного типа автошасси.
Далее определяется перевес ΔРос - разница нагружения на задний и передний мосты:
ΔPос=Pзад-Pпер
Нагрузка Рлб, действующая на левый борт (см. фиг.7):
Рлб=(Робщ·(В-В1))/В,
В - расстояние между бортами;
B1 - расстояние от левого борта до центра масс полностью снаряженного транспортного средства.
Нагрузка Рпб, действующая на правый борт
Рпб=Робщ-Рлб
Далее определяется перевес ΔРос - разница нагружения на левый и правый борт:
ΔРб=Рлб-Рпб
На шестом этапе определяется продольная и поперечная устойчивость транспортного средства без учета деформации рессор и шин.
Передний угол свеса αпmax (см. фиг.4) определяется по формуле:
αпmax=arctg I1 /zmax,
где I1 - центр масс по длине транспортного средства относительно оси передних колес;
zmax - центр масс по высоте транспортного средства относительно уровня земли.
Задний угол свеса αзmах (см. фиг 3) определяется по формуле:
αзmax=arctg a /zmax,
где а - центр масс по длине транспортного средства относительно оси задних колес.
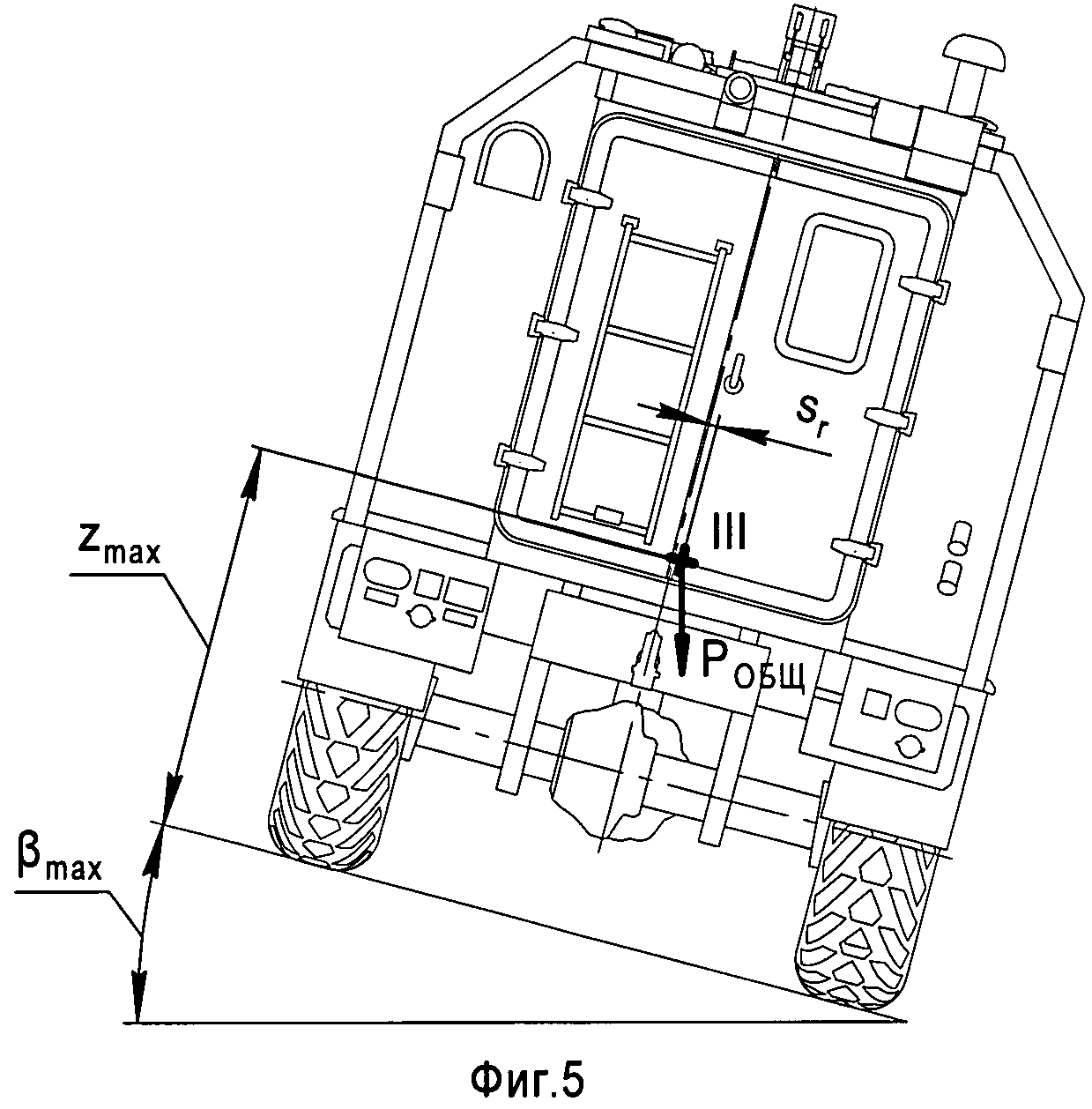
Поперечная устойчивость транспортного средства βmах (см. фиг.5) определяется по формуле:
βmах=arctg s/2-sr/zmax,
где s - расстояние между колесами;
Sr - расстояние от центр масс по ширине кузова от продольной оси.
На седьмом этапе определяются допустимые нагрузки на элементы кузова-фургона: пол, борта, заднюю и переднюю панели, крышу.
Нагрузка на пол Fп определяется по формуле:
Fпол=Gпол/Sпол,
где Gпол - общая масса оборудования, установленного на пол;
Sпол - площадь пола.
Нагрузка на борт Fб определяется по формуле:
Fб=Gп/Lб,
где Gб - общая масса оборудования, установленного на соответствующий борт;
Lб - длина соответствующего борта.
Нагрузка на переднюю и заднюю панели Fп определяется по формуле:
Fпан= Gпан/Lпан,
где Gпан - общая масса оборудования, установленного на соответствующей панели;
Lпан - длина соответствующей панели.
Нагрузка на крышу Fкр определяется суммой масс установленного на ней оборудования.
На заключительном этапе проводится анализ полученных результатов: месторасположения центра масс полностью снаряженного транспортного средства, значения полученных нагрузочных параметров, которые не должны превышать допустимых для данного транспортного средства значений. При необходимости производится перекомпоновка оборудования и аппаратных средств с дальнейшим перерасчетом.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в формировании способа расчета массово-геометрических и нагрузочных параметров транспортного средства специального назначения, который позволяет определить массу и координаты центр масс полностью снаряженного автомобиля, оборудования с операторами и командиром и шасси с кузовом-фургоном, нагрузки по осям и бортам транспортного средства, в т.ч. с использованием программных средств вычислительной техники.
Способ расчета массово-геометрических и нагрузочных параметров транспортного средства специального назначения, заключающийся в том, что координаты центра масс системы (транспортного средства) определяются через координаты центров масс отдельных элементов системы, входящих в ее состав, как отношение суммы произведений масс элементов системы на их координаты к полной массе системы, отличающийся тем, что на первоначальном этапе принимается система координат транспортного средства, на втором этапе определяются масса и координаты центра масс оборудования и аппаратных средств с экипажем, на третьем этапе определяются координаты центра масс транспортного средства, оборудованного кузовом-фургоном, на четвертом этапе определяются масса и координаты центра масс полностью снаряженного транспортного средства, на пятом этапе определяется распределение нагрузки на переднюю, заднюю оси и борта транспортного средства, для чего силы, распределенные по длине транспортного средства, заменяются на сосредоточенные, приложенные соответственно к серединам колес и бортам, на шестом этапе определяется продольная и поперечная устойчивость транспортного средства без учета деформации рессор и шин, на седьмом этапе определяются допустимые нагрузки на элементы кузова-фургона: пол, борта, заднюю и переднюю панели, крышу, на восьмом этапе проводится анализ полученных результатов и при необходимости производится перекомпоновка оборудования и аппаратных средств с дальнейшим перерасчетом.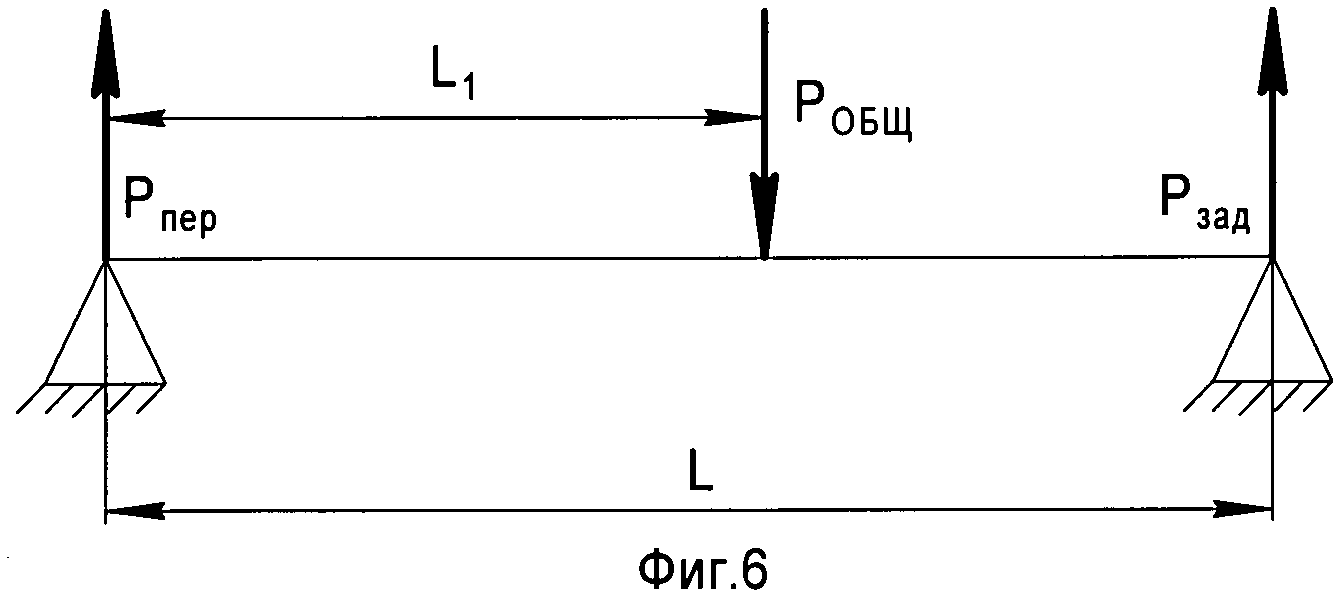
Способ термообработки пенька ствола автоматического стрелкового оружия
Способ стабилизации гальванического хромового покрытия стволов автоматического стрелкового оружия и шахтная печь сопротивления для его реализации
Способ формирования режима работы с цифровыми картами местности
Способ контроля функционирования топопривязчика
Программно-аппаратный комплекс
Кулачковый механизм с кинематическим замыканием и способ местной закалки роликового паза кулачка
Способ определения угла поворота мобильного робототехнического комплекса при преодолении препятствий
Механизм образования пакета для брикета правильной геометрической формы
Поворотная пусковая установка
Пулемет
Способ термообработки пенька ствола автоматического стрелкового оружия
Способ стабилизации гальванического хромового покрытия стволов автоматического стрелкового оружия и шахтная печь сопротивления для его реализации
Способ формирования режима работы с цифровыми картами местности
Способ контроля функционирования топопривязчика
Программно-аппаратный комплекс
Кулачковый механизм с кинематическим замыканием и способ местной закалки роликового паза кулачка
Способ определения угла поворота мобильного робототехнического комплекса при преодолении препятствий
Механизм образования пакета для брикета правильной геометрической формы
Поворотная пусковая установка
Пулемет

