Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ГРУЗОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ
Вид РИД
Изобретение
Изобретение относится к подъемно-транспортному машиностроению и может быть использовано для выполнения погрузочно-разгрузочных, строительно-монтажных, ремонтных, аварийно-восстановительных и ряда других специализированных работ в различных отраслях хозяйства.
Известен способ управления грузоподъемным краном и устройство для его осуществления (см. патент №2325317 RU, B66C 13/18 (2006.01), 27.05.2008 г.). Способ включает определение положения оборудования крана и нагрузки на грузозахватном органе, инициирование оператором движений оборудования крана и отключение приводов оборудования крана при перегрузке. До определения положения оборудования крана запоминают координаты препятствий на стройплощадке. В памяти процессора формируют контуры препятствий и отображают их на дисплее, а по сигналам датчиков положения оборудования крана определяют координаты начального положения грузозахватного органа, задают координаты конечного положения грузозахватного органа, запоминают и отображают их на дисплее. При инициировании крановщиком движений оборудования крана определяют прогнозируемую траекторию перемещения грузозахватного органа и отображают ее на дисплее. Перемещение грузозахватного органа осуществляют в режимах гашения раскачивания груза, защиты крана от перегрузки и столкновений с препятствиями, снижения скорости перемещения грузозахватного органа с последующим торможением и остановом движений. Устройство содержит процессоры "n" датчиков положения оборудования крана, датчик нагрузки, блок задания координат препятствий и задатчик конечных координат грузозахватного органа, дисплей, блок управления приводами. Недостатками способа управления являются:
- необходимость вычисления и задания координат конечного положения грузозахватного органа, усложняя при этом процесс управления;
- невозможность непосредственного воздействия оператором на груз, что может сказаться в худшую сторону на контроле выполнения операции.
Наиболее близко к заявленному изобретению является способ управления приводом грузоподъемной машины (см. патент №2321534 RU, B66C 23/88 (2006.01), B66C 13/56 (2006.01), 10.04.2008 г.). Способ управления приводом грузоподъемной машины осуществляют путем воздействия оператора на орган управления грузоподъемной машиной, передачи перемещения этого органа на управляющий элемент привода, выполненного с возможностью перемещения какого-либо механизма грузоподъемной машины в зависимости от перемещения управляющего элемента, а также предварительного определения допустимого значения, по меньшей мере, одного параметра, характеризующего нагрузку и/или пространственное положение стрелы или грузозахватного органа грузоподъемной машины, его запоминания, измерения в процессе работы грузоподъемной машины указанного параметра прямым или косвенным методом, сравнения его измеренного значения с допустимым и последующего формирования сигнала управления приводом. Причем сигнал управления используют для блокирования перемещения управляющего элемента привода и при необходимости производят возврат этого элемента в нейтральное положение. Блокирование перемещения управляющего элемента привода осуществляют путем механического блокирования передачи перемещения органа управления грузоподъемной машиной на управляющий элемент привода или механического блокирования перемещения этого органа.
Недостатками способа управления приводом грузоподъемной машины являются:
- управление приводом грузоподъемной машины путем воздействия оператора на орган управления грузоподъемной машиной, что обеспечивает невысокую точность перемещения и позиционирования груза;
- невозможность непосредственного воздействия оператором на груз, что может сказаться в худшую сторону на контроле выполнения операции.
Известна система управления грузоподъемного крана (см. патент №2343104 RU, B66C 13/18 (2006.01), B66C 23/88 (2006.01), B66C 15/00 (2006.01), 10.01.2009 г.). Система содержит гидравлические, электрогидравлические и/или электрические приводы механизмов крана, устройство управления этими приводами и связанное с ним устройство для управления подачей топлива. В процессе работы крана осуществляется автоматическое изменение подачи топлива в зависимости от нагрузки, пространственного положения и/или скорости перемещения груза. Во втором варианте системы реализуется автоматическое изменение подачи топлива при приближении или прикосновении руки крановщика к рукоятке управления приводами. Устройство управления приводами выполнено в виде аппарата управления, содержащего рукоятку управления, датчик/датчики положения этой рукоятки и контроллер, выходы которого непосредственно или через дополнительное выходное устройство соединены с управляющими входами приводов и устройства для управления подачей топлива. Уровень подачи топлива, в общем случае, устанавливается различным для разных приводов и направлений перемещения механизмов крана. После возврата крановщиком рукояток управления приводами крана в нейтральное положение или после снятия рук с этих рукояток в течение заданного интервала времени сохраняется текущее значение угловой скорости двигателя, после чего автоматически устанавливается минимальная заданная скорость холостого хода двигателя.
Недостатками системы являются:
- наличие только рукоятки для управления приводами, что обеспечивает невысокую точность перемещения и позиционирования груза;
- невозможность плавного позиционирования груза сразу по трем пространственным координатам одной рукояткой.
Наиболее близко к заявленному изобретению является устройство имитации невесомости механизмов с гибкой конструкцией элементов (см. патент №2334970 RU, G01M 19/00 (2006.01), B64G 7/00 (2006.01), 27.09.2008 г.). Устройство содержит электропривод вертикального перемещения, связанный с обезвешиваемым элементом гибкой связью, проходящей через каретку, с нагрузочной ячейкой, служащей для определения усилия натяжения гибкой связи, перемещающуюся по направляющей. При этом нагрузочная ячейка связана с электроприводом вертикального перемещения через блок управления, который, в свою очередь, связан с электроприводом горизонтального перемещения через датчик, определяющий вертикальное положение гибкой связи и расположенный на каретке. Блок управления состоит из микроконтроллера и персонального компьютера.
Недостатками устройства имитации невесомости механизмов с гибкой конструкцией элементов являются:
- наличие только двух датчиков для определения состояния подвешенного элемента, что позволяет определить только две характеристики пространственного положения элемента;
- сложность системы управления устройством, содержащей как микроконтроллер, так и персональный компьютер.
- узкая сфера применения прототипа - для обезвешивания механизмов с гибкой конструкцией элементов при проведении наземных испытаний механизмов, рассчитанных на работу в невесомости.
Задачей изобретения является удобство задания управляющего воздействия для перемещения груза в пространстве и повышение точности позиционирования груза оператором.
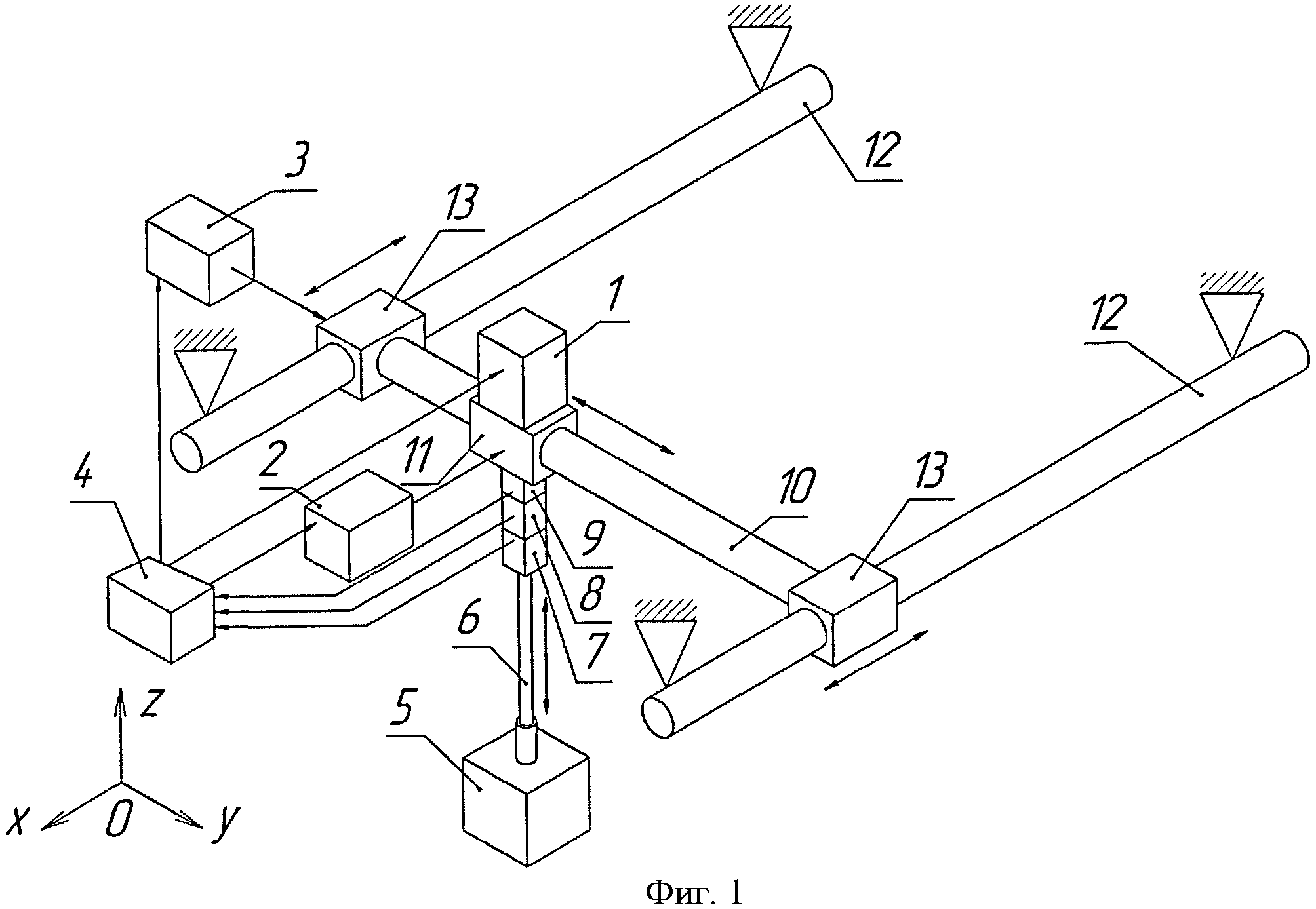
На фиг.1 изображено устройство перемещения грузов.
Устройство перемещения грузов содержит привод 1 вертикального перемещения, привод 2 горизонтального перемещения, привод 3 горизонтального перемещения, блок управления 4. Привод 1 вертикального перемещения соединен с грузом 5 тросом 6 с датчиком 7 натяжения троса, датчиком 8 отклонения троса от вертикали и датчиком 9 отклонения троса от вертикали. Привод 2 горизонтального перемещения выполнен с возможностью перемещения по направляющей 10 каретки 11 с приводом 1 вертикального перемещения. Привод 3 горизонтального перемещения выполнен с возможностью перемещения по направляющим 12 кареток 13 с направляющей 10. Блок управления 4 соединен с приводом 1 вертикального перемещения, приводами 2 и 3 горизонтального перемещения, а так же датчиком 7 натяжения троса и датчиками 8 и 9 отклонения троса от вертикали
В способе управления перемещением грузов блок управления подает управляющие сигналы на элементы приводов, перемещающие механизмы грузоподъемной машины, а следовательно, и груз в заданном направлении с заданной скоростью. Управляющие сигналы на приводы формируются на основе данных, полученных блоком управления от датчика натяжения троса и двух датчиков отклонения троса от вертикали при непосредственном воздействии оператора на груз в необходимом направлении и с необходимым усилием.
Задача изобретения решена следующим образом. Оператор задает траекторию перемещения тела в пространстве при помощи непосредственного воздействия на груз, а система управления, реализованная в устройстве, управляет перемещением тела в пространстве на основе обезвешивания с помощью трех приводов.
Привод 1 вертикального перемещения соединен с грузом 5 (в прототипе - обезвешиваемый элемент) тросом 6 (в прототипе - гибкая связь) с датчиком 7 натяжения троса (в прототипе - нагрузочная ячейка), датчиком 8 отклонения троса от вертикали в плоскости yOz (в прототипе - датчик угла) и датчиком 9 отклонения троса от вертикали в плоскости xOz.
Привод 2 горизонтального перемещения в направлении Oy выполнен с возможностью перемещения по направляющей 10 каретки 11 с приводом 1 вертикального перемещения.
Привод 3 горизонтального перемещения в направлении Ox выполнен с возможностью перемещения по направляющим 12 кареток 13 с направляющей 10.
Блок управления 4 содержит арифметическо-логическое устройство и позволяет создать все необходимые опции управления устройством перемещения грузов. Блок управления 4 соединен с приводом 1 вертикального перемещения, приводами 2 и 3 горизонтального перемещения, а так же датчиком 7 натяжения троса, датчиками 8 и 9 отклонения троса от вертикали.
Устройство работает следующим образом: оператор толкает подвешенный груз 5 в заданном направлении, тем самым изменяя натяжение троса 6 и отклоняя трос 6 от вертикали. Блок управления 4 на основе сигналов с датчика 7 натяжения и датчиков 8 и 9 отклонения троса от вертикали формирует алгоритм работы устройства. В соответствии с этим алгоритмом формируются управляющие сигналы на привод 1 вертикального перемещения, который перемещает груз 5 в вертикальном направлении, и приводы 2 и 3 горизонтального перемещения, которые перемещают каретки 11 и 13 по направляющим 10 и 12, а следовательно, и груз 5 в горизонтальной плоскости. Таким образом, обеспечивается необходимая траектория в пространстве груза 5 для позиционирования.
Перемещение груза основано на обезвешивании тела и осуществляется при помощи непосредственного воздействия оператора на груз. Датчики позволяют определить величину и направление силы, прикладываемой оператором непосредственно к грузу. Система управления на основе данных, полученных от датчиков, формирует управляющие воздействия на приводы, которые перемещают груз.
Реализация предлагаемого изобретения позволяет облегчить оператору управление перемещаемым грузом за счет прямого влияния на процесс перемещения, а также повысить точность позиционирования груза путем непосредственного контроля выполнения операций.
Линейный индукционный ускоритель с двумя разнополярными импульсами
Способ изготовления полимерной ионообменной мембраны радиационно-химическим методом
Способ измерения флюенса быстрых нейтронов полупроводниковым монокристаллическим детектором
Устройство для раскатки и отбортовки полых изделий
Способ получения композиционного керамического материала
Способ получения фенилэтинил производных ароматических соединений
Способ очистки природных вод
Устройство управления и обеспечения живучести двигателя двойного питания
Способ измерения угловой скорости вращения трехфазного асинхронного электродвигателя
Система зажигания

