Результат интеллектуальной деятельности: СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ
Вид РИД
Изобретение
Изобретение относится к радиолокации, в частности к бортовым радиолокационным средствам навигации летательных аппаратов (ЛА), обеспечивающим получение в полете ЛА радиолокационных изображений (РЛИ) земной поверхности и сопоставление этих изображений с заранее подготовленными эталонными изображениями.
Сопоставление получаемых радиолокационных изображений с эталонными осуществляется путем расчета максимума некоторой двумерной функции, отражающей взаимную корреляцию эталонного и рабочего радиолокационных изображений, по положению которого, определенному при изменении взаимного относительного положения получаемого и эталонного радиолокационных изображений, формируются оценки координат положения известного участка местности относительно ЛА, по которым определяются навигационные ошибки системы управления ЛА.
Известен способ, описанный в [1], в соответствии с которым бортовая радиолокационная система (БРЛС), входящая в состав бортовой системы управления беспилотным летательным аппаратом (БПЛА), с использованием сканирования антенны просматривает пространство в горизонтальной плоскости:
перед БПЛА (в режиме приведения БПЛА к радиоконтрастному объекту);
от нулевого положения антенны, совпадающего с плоскостью стрельбы, до крайнего углового положения сектора измерений (в режиме приведения БПЛА к нерадиоконтрастному объекту).
В процессе обзора формируется массив A(i,j) измерений радиолокационных сигналов, с присвоением каждому элементу массива соответствующего значения угла Ψi поворота антенны и дальности Dj, соответствующей измеряемому отраженному сигналу.
Далее этот массив подвергается корреляционной обработке путем сравнения измеренного массива с последовательно перебираемыми бинарными последовательностями B(i,j) фрагментов заранее подготовленной эталонной карты.
По результатам этой обработки определяется расположение измеренного массива на эталонной карте, продольная ось которой ориентирована вдоль плоскости стрельбы. Смещение ближнего левого участка поверхности, где измеряется отраженный сигнал, относительно левой нижней точки эталонной карты определяет ошибки приведения БПЛА в заданную точку на дистанции проведения измерений.
Недостатком данного способа является то, что азимутальное разрешение формируемого радиолокационного изображения определяется шириной диаграммы направленности антенны радиолокационного координатора, что не позволяет осуществлять достаточно точную «привязку» получаемого радиолокационного изображения к эталону. Кроме того, преобразование полярных координат (Ψi, Dj) в прямоугольную (XOZ) осуществляется простым переприсвоением номеров (i,j) массива A(i,j) в номера линейных координат Х и Z, что также существенно снижает точность производимых вычислений навигационных ошибок.
Данный способ имеет существенное отличие от предлагаемого, заключающееся в том, что в предлагаемом способе используется БРЛС с синтезированием антенного раскрыва (CAP).
Наиболее близким по технической сущности аналогом (прототипом) предлагаемого способа является способ, описанный в [2].
В соответствии с этим способом оценку навигационных ошибок инерциальной системы управления летательного аппарата (ЛА) получают с помощью параметров максимума двумерной взаимокорреляционной функции (ВКФ) эталонного и рабочего радиолокационных изображений (РЛИ) заданного (опорного) участка местности.
Эталонное РЛИ участка местности рассчитывается на борту ЛА для одной или нескольких точек коррекции с помощью цифровой модели местности (ЦММ), предварительно подготовленной на основе цифровых векторных карт земной поверхности.
ЦММ задается в земной системе координат с началом в приоритетной точке, которая задается в полетном задании, ось Х направлена вдоль меридиана на север, ось Y - вертикально вверх, ось Z - вдоль параллели на восток.
Эталонное РЛИ рассчитывается для каждой точки коррекции в полярной системе координат, присущей радиолокационному датчику.
Полярная сетка координат «дальность-азимут» формируется вокруг некоторой приоритетной точки (ПТ) для заданных границ строба дальности Rmin и Rmax и границ сектора обзора по азимуту Bbeg и Bend. Приоритетная точка определяется в полетном задании.
Эталонное РЛИ представляет собой матрицу Aet мощности сигналов, «отраженных» от элементарных участков местности и расположенных в узлах полярной сетки.
В точке коррекции траектории ЛА выполняются процедуры:
- оценки вектора собственной скорости ЛА по алгоритму, описанному в [3];
- оценки угла места цели на основе оценок углов места ярких точек РЛИ;
- оценки высоты цели относительно ЛА на основе оценок угла места.
В точке коррекции с использованием БПФ осуществляется согласованная цифровая обработка излучаемых и принимаемых пачек импульсов, результатом которой является набор кадров рабочего РЛИ местности, элементы которого расположены в полярной сетке координат. С использованием некогерентной обработки кадров рабочего РЛИ в полярной системе координат формируется рабочее РЛИ заданного участка местности.
Взаимокорреляционная функция эталонного и рабочего РЛИ, получаемого с использованием CAP, вычисляется по координатам точек эталона относительно каждой точки рабочего РЛИ (относительные положения).
С учетом возможного рассогласования между двумя РЛИ по углу поворота, при расчете взаимной корреляции производится поиск наиболее вероятного угла поворота эталонного РЛИ. Процедура расчета и поиска максимума ВКФ повторяется для заданного (тестового) набора углов взаимного поворота РЛИ. При этом производится селекция самого большого максимума ВКФ.
Затем при заданных параметрах корреляционного сравнения вычисляется взаимный линейный сдвиг двух РЛИ по осям нормальной земной системы координат, а также величина взаимного углового сдвига этих РЛИ.
Однако такой способ обладает следующими недостатками.
1. Азимутальный угловой размер радиолокационных изображений объекта наблюдения, формируемых в системе координат «дальность - азимут», изменяется при изменении дальности до этого объекта. Например, наблюдаемый участок коррекции поперечной протяженностью 1 км при наблюдении с дистанции 5 км имеет угловую ширину 11,42°, а с дистанции 6 км - 9,53°.
Таким образом, в условиях наличия неизвестных плановых ошибок вывода ЛА в точку начала обзора района заранее заданного (опорного) участка местности (точку формирования РЛИ [2]) возможно получение радиолокационных изображений этого участка существенно различающихся азимутальных размеров, что затрудняет их последующую взаимокорреляционную обработку с подготовленными радиолокационными эталонами.
2. Смещение реального положения точки формирования РЛИ относительно расчетного, использовавшегося при формировании эталона, приводит к развороту формируемого рабочего РЛИ относительно эталонного, что также затрудняет последующую взаимокорреляционную обработку рабочего и эталонного РЛИ. Например, при поперечном смещении реального положения точки формирования РЛИ относительно расчетного на 500 м, дальности до объекта наблюдения 5 км и азимутальном отклонении направления визирования заданного участка местности в режиме РСА от направления вектора скорости ЛА 15° разворот рабочего РЛИ относительно расчетного составит 9,5°.
Для устранения этого эффекта в прототипе предусмотрена оценка максимума ВКФ с использованием перебора эталонных РЛИ, поворачиваемых на заданные углы.
3. Не учитывается возможность изменения параметров полета ЛА в течение времени формирования кадров рабочего РЛИ, в том числе горизонтальных и вертикальной составляющих скорости полета ЛА, высоты полета. Указанные составляющие тесно связаны с величиной доплеровских частот сигналов, отражаемых элементами наблюдаемого участка местности, на основе оценок которых формируется рабочее РЛИ.
Отличительными признаками предлагаемого способа от прототипа является то, что формирование как эталонного, так и рабочего РЛИ, а также их взаимокорреляционная обработка осуществляются в нормальной земной системе координат (НЗСК), связанной с заданным (опорным - ОУМ) участком местности, в точке коррекции, а в обеспечение формирования рабочих РЛИ в НЗСК ОУМ в каждой точке коррекции осуществляются:
определение величин поправок к оценкам значений параметров полета, формируемым бортовым комплексом управления ЛА;
формирование кадров первичных рабочих РЛИ области ОУМ в системе координат «доплеровская частота - дальность»;
преобразование кадров первичных рабочих РЛИ области ОУМ из системы координат «доплеровская частота - дальность» в НЗСК ОУМ с учетом определенных величин поправок к текущим значениям параметров полета, формируемым бортовым комплексом управления ЛА;
формирование рабочего РЛИ ОУМ на основе некогерентного сложения кадров рабочих РЛИ в НЗСК ОУМ;
взаимокорреляционная обработка эталонного и рабочего РЛИ ОУМ в НЗСК ОУМ и определение коррекций плановых координат ЛА относительно заданной точки на ОУМ (точки прицеливания, цели, приоритетной точки).
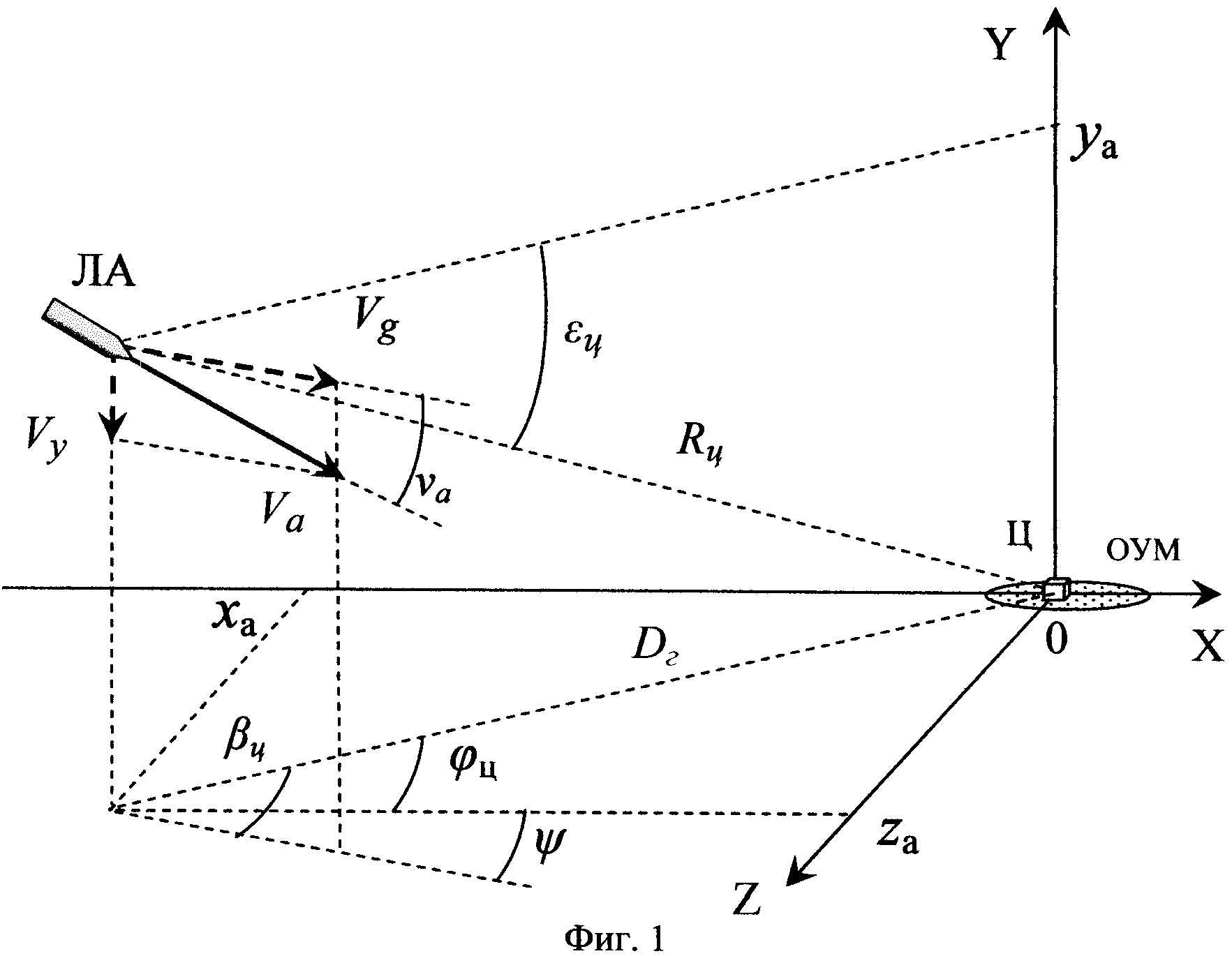
Положение осей НЗСК ОУМ показано на фиг.1. Ось OY направлена вверх по местной вертикали, проходящей через точку прицеливания (ТП) на ОУМ. Ось ОХ перпендикулярна оси OY. Ось OZ дополняет систему координат до правой.
Направление оси ОХ определяется условиями задачи, в которых осуществляется навигация ЛА. В том числе, ось ОХ может быть направлена, например, на север или принадлежать азимутальной плоскости, совпадающей с направлением от точки старта ЛА до конечной точки его приведения или совпадать с планируемым азимутальным направлением на точку прицеливания опорного участка местности, по которому должна осуществляться коррекция траектории полета ЛА, из точки коррекции.
Направление оси ОХ на ОУМ определяет ориентацию эталонного и формируемого рабочего радиолокационных изображений.
В рассматриваемых условиях координаты в НЗСК ОУМ каждого элемента участка местности (элементарного отражателя радиолокационных сигналов), соответствующего i-му элементу первичного рабочего РЛИ, формируемого в полярных координатах с центром, находящимся в точке, соответствующей проекции положения фазового центра антенны (ФЦА) бортовой РЛС ЛА на горизонтальную плоскость НЗСК ОУМ, определяются следующими соотношениями:


где:
хa, za - оценки текущих плановых координат ФЦА БРЛС летательного аппарата в НЗСК ОУМ, получаемые на основе данных бортового комплекса управления ЛА (например, инерциальной навигационной системой) на момент формирования рабочего радиолокационного изображения;
 - оценка горизонтальной дальности от ФЦА БРЛС ЛА до элемента ОУМ, соответствующего i-му элементу формируемого первичного рабочего РЛИ;
- оценка горизонтальной дальности от ФЦА БРЛС ЛА до элемента ОУМ, соответствующего i-му элементу формируемого первичного рабочего РЛИ;
Ri - оценка наклонной дальности от ФЦА БРЛС до элемента ОУМ, соответствующего i-му элементу формируемого первичного рабочего РЛИ;
βi - оценка угла визирования элемента ОУМ, соответствующего i-му элементу формируемого первичного рабочего РЛИ, в горизонтальной плоскости относительно направления путевой скорости ЛА;
εi - оценка угла визирования элемента ОУМ, соответствующего i-му элементу формируемого первичного рабочего РЛИ, относительно горизонтальной плоскости.
Ψ - оценка угла пути ЛА;
φi=βi+Ψ - оценка угла между осью ОХ и направлением визирования элемента объекта наблюдения, соответствующего i-му элементу формируемого первичного рабочего РЛИ, в горизонтальной плоскости.
При этом для величин βi, εi, Ψ справедливо:


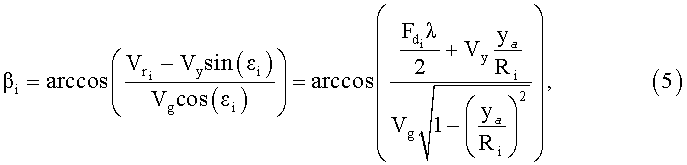
 ,
, 
где:
ya=yла-yц - оценка высоты полета ЛА относительно точки прицеливания (цели) на ОУМ;
yла - оценка абсолютной высоты полета ЛА;
yц - абсолютная высота расположения точки прицеливания на ОУМ;
 - оценка скорости сближения ФЦА БРЛС ЛА с элементом ОУМ, соответствующим i-му элементу формируемого первичного рабочего РЛИ;
- оценка скорости сближения ФЦА БРЛС ЛА с элементом ОУМ, соответствующим i-му элементу формируемого первичного рабочего РЛИ;
 - доплеровская частота, соответствующая i-му элементу формируемого рабочего РЛИ;
- доплеровская частота, соответствующая i-му элементу формируемого рабочего РЛИ;
λ - длина волны зондирующих сигналов бортовой РЛС;
Vy=Vsin(νa) - оценка скорости изменения высоты ЛА;
V - оценка скорости полета ЛА;
νa - оценка угла наклона вектора скорости ЛА к горизонтальной плоскости НЗСК ОН;
 - оценка путевой (горизонтальной составляющей) скорости полета ЛА;
- оценка путевой (горизонтальной составляющей) скорости полета ЛА;
Vx=Vg cos(Ψ) - оценка составляющей скорости полета ЛА по оси X;
Vz=-Vg sin(Ψ) - оценка составляющей скорости полета ЛА по оси Z.
С учетом приведенных соотношений координаты в НЗСК ОУМ каждого элемента участка местности (элементарного отражателя радиолокационных сигналов), соответствующего i-му элементу первичного рабочего РЛИ ОУМ, формируемого бортовой РЛС в системе координат «доплеровская частота - дальность», рассчитываются при формировании кадров рабочего РЛИ в НЗСК ОУМ на борту ЛА по следующим формулам:


Приведенные выражения отражают зависимость оценок плановых координат i-го отражателя ОУМ в НЗСК ОУМ от значений параметров, характеризующих условия полета ЛА.
При получении точных оценок значений параметров, характеризующих:
- относительную высоту полета (yа) ЛА, составляющие скорости (Vy, Vg, Vx, Vz и соответственно угол Ψ) полета ЛА;
- наклонную дальность Ri до i-го отражателя и доплеровскую частоту  сигналов, отраженных i-м отражателем ОУМ,
сигналов, отраженных i-м отражателем ОУМ,
с использованием формулы полного дифференциала получим:
 ;
; 
Иначе, при наличии достаточно точных оценок значений перечисленных параметров полета ЛА смещение ЛА по координатам Х и Z приводит к такому же смещению рабочего РЛИ в НЗСК ОУМ без его искажений и разворота относительно эталонного РЛИ. Данное обстоятельство существенно упрощает взаимокорреляционную обработку эталонного и рабочего РЛИ, увеличивает вероятность их правильной взаимной привязки.
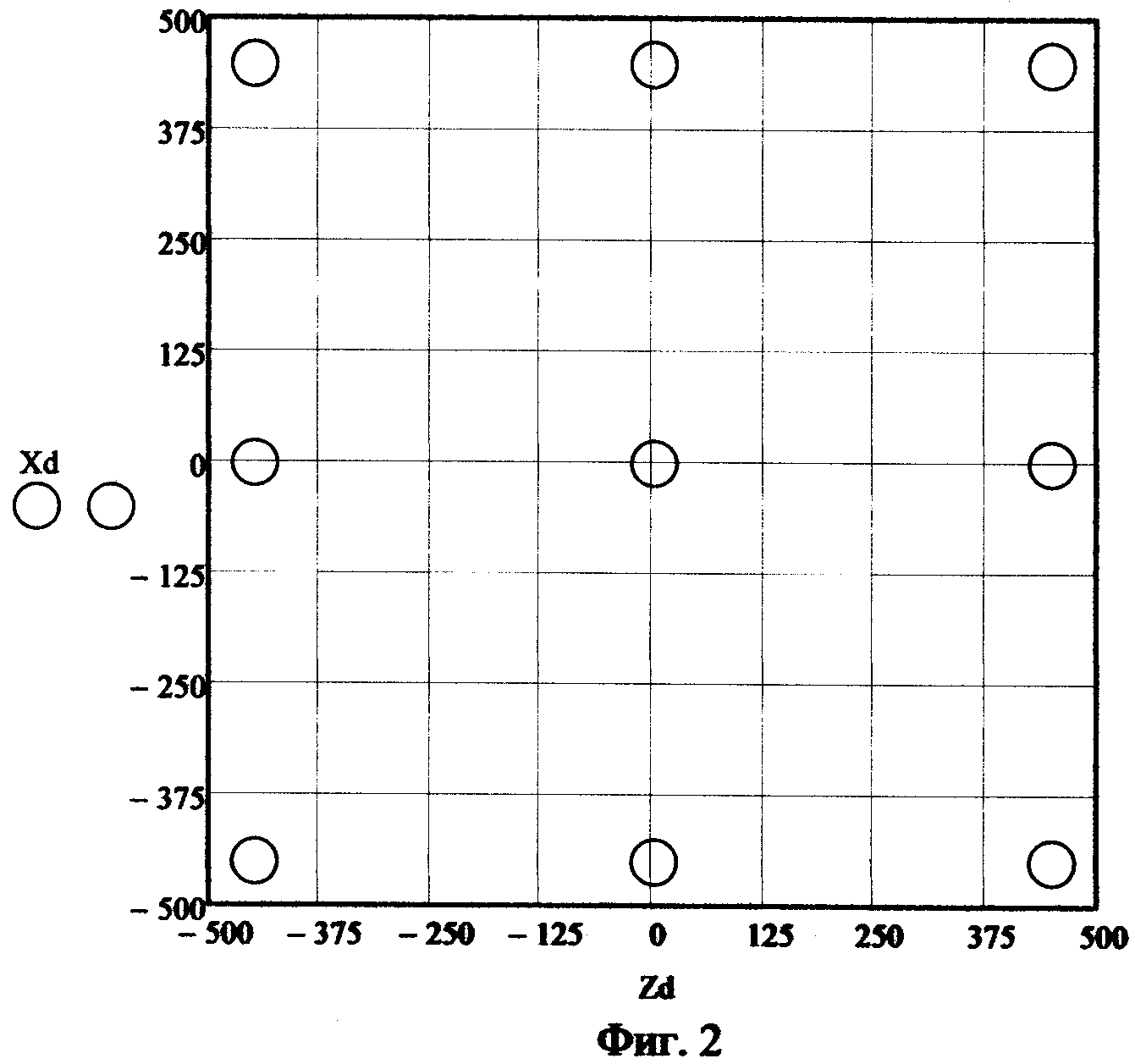
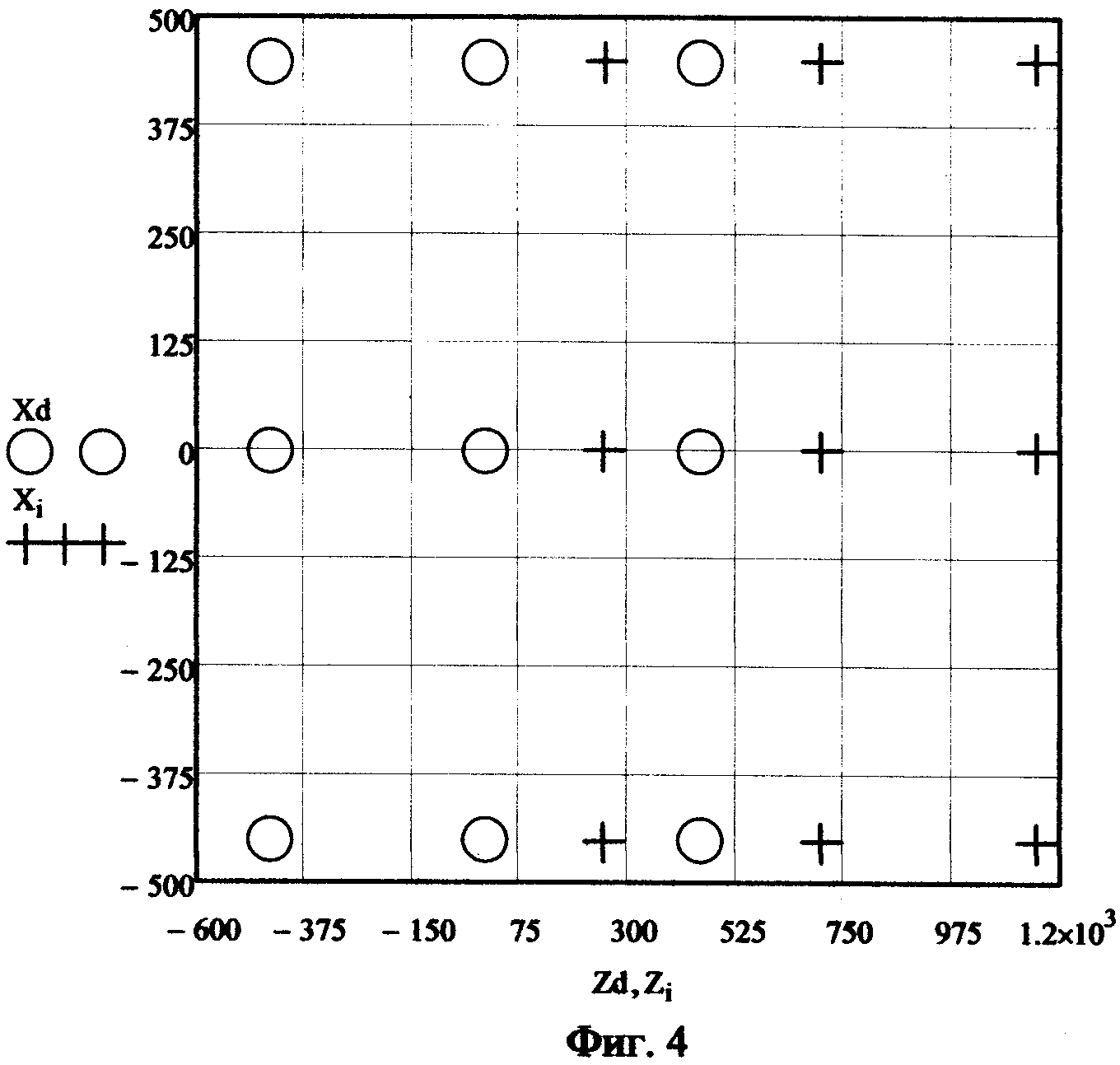
На фиг.2 приведено изображение в НЗСК тестового ОУМ, включающего в свой состав 9 радиолокационных отражателей, отстоящих друг от друга на расстоянии 450 метров. Центр НЗСК ОУМ совмещен с центральным отражателем.
На фиг.3 приведены отметки, соответствующие действительному положению указанных радиолокационных отражателей, и отметки (крестообразные), полученные в результате формирования в НЗСК соответствующего рабочего радиолокационного изображения, при следующих параметрах полета ЛА:
|
На фиг.4 приведены отметки, соответствующие действительному положению указанных радиолокационных отражателей, и отметки, полученные в результате формирования в НЗСК ОУМ соответствующего рабочего радиолокационного изображения, при тех же параметрах полета ЛА, но при отсутствии ошибки счисления координат ЛА по оси Х и наличии ошибки счисления координат ЛА по оси Z, равной 700 м.
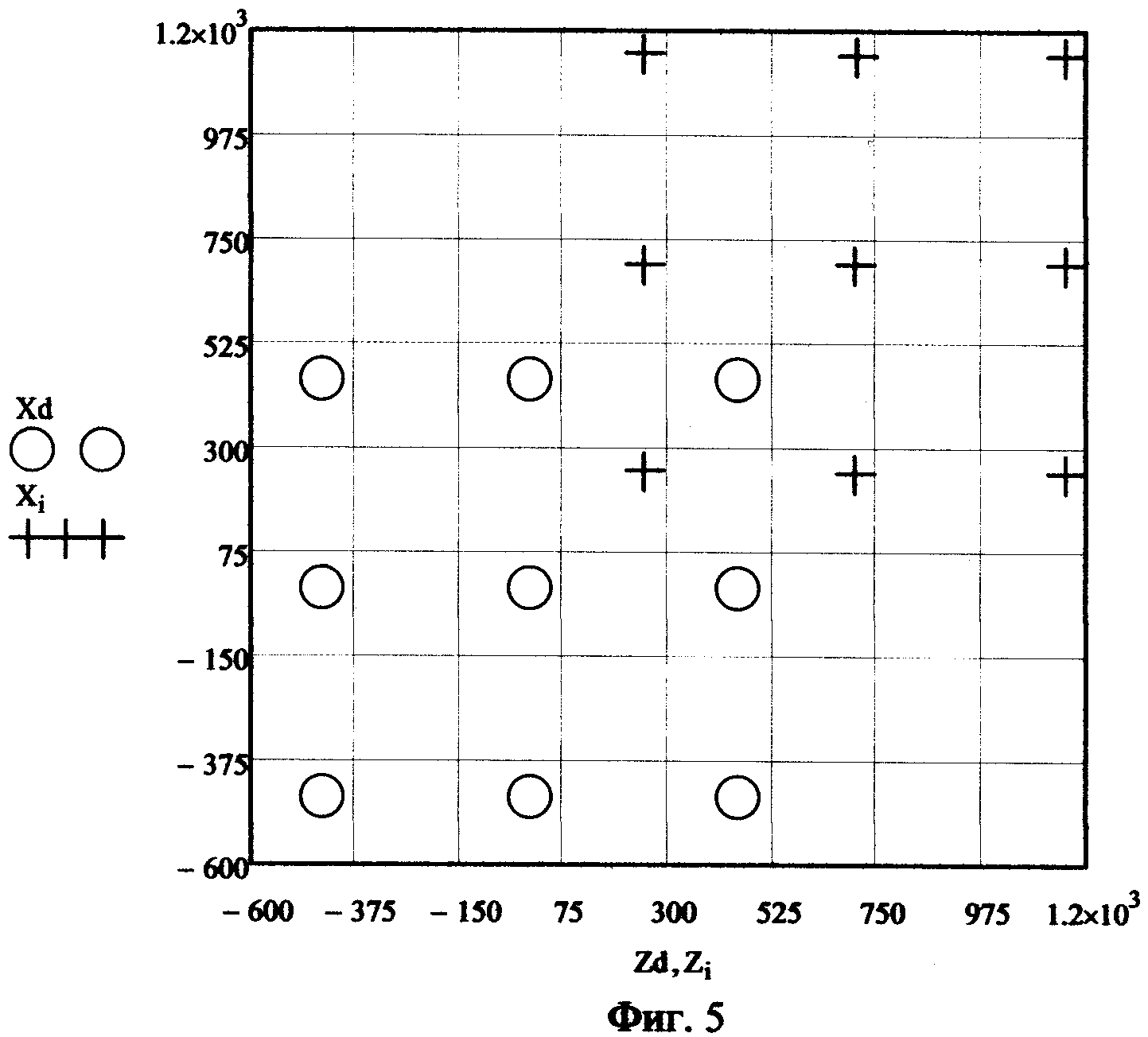
На фиг.5 приведены отметки, соответствующие действительному положению указанных радиолокационных отражателей, и отметки, полученные в результате формирования в НЗСК ОУМ соответствующего рабочего радиолокационного изображения, при тех же параметрах полета ЛА, но при наличии ошибок счисления координат ЛА как по оси X, так и по оси Z, равных 700 м.
Приведенные РЛИ тестовых позиций иллюстрируют отсутствие плановых искажений и разворота их радиолокационных изображений, формируемых в НЗСК ОУМ на борту ЛА.
Точные оценки наклонных дальностей и доплеровских частот отраженных сигналов обеспечиваются БРЛС ЛА.
Получение точных оценок значений параметров полета ЛА может быть осуществлено с использованием соответствующих измерений, проводимых перед формированием рабочих РЛИ на борту ЛА.
Оценка вектора скорости полета ЛА (и соответственно угла Ψ) может быть получена, как и в прототипе, путем определения доплеровского сдвига частоты по алгоритму, описанному в [3]. Оценка относительной высоты полета ЛА может быть получена, как и в прототипе, путем оценок угла места ярких точек рабочего РЛИ, или с использованием моноимпульса [4].
Однако в общем случае, например, при формировании рабочих РЛИ в условиях маневрирования ЛА возможны значительные изменения значений параметров полета ЛА, которые могут повлечь за собой расфокусировку, рассогласование и искажение кадров формируемых рабочих РЛИ.
Устранение этого недостатка обеспечивается с учетом того, что ошибки измерительных, в том числе инерциальных систем [5] бортовых комплексов управления (БКУ) ЛА, являются медленно меняющимися процессами и в пределах времени формирования кадров РЛИ, которое может достигать нескольких секунд, эти ошибки можно считать постоянными.
В предлагаемом способе по результатам проведения измерений параметров полета ЛА, которые производятся перед формированием рабочих РЛИ ОУМ, определяются поправки ΔVy, ΔVx, ΔVz, Δyа, к значениям оценок соответствующих параметров полета ЛА, формируемым измерителями БКУ ЛА.
Данные поправки, затем, при формировании кадров рабочих РЛИ, суммируются с текущими значениями параметров полета ЛА, поступающими от измерителей БКУ ЛА, при этом обеспечивается формирование уточненных оценок текущих значений параметров полета ЛА.
С учетом изложенного предлагаемый способ навигации летательного аппарата по радиолокационным изображениям земной поверхности реализуется по следующему алгоритму.
1. При подготовке полетного задания ЛА определяются опорные участки местности, по радиолокационным изображениям которых должна осуществляться коррекция траектории полета ЛА. Для каждого ОУМ назначается точка прицеливания и задаются направления осей НЗСК ОУМ, исходя из условий навигационной задачи. Определяются условия начала формирования рабочего РЛИ ОУМ, например, достижение заданной дальности до ТП, заданной на ОУМ.
2. Для каждого ОУМ перед полетом или в процессе выполнения полета формируются в НЗСК ОУМ эталонные РЛИ.
3. В полете ЛА по заданной траектории в каждой точке коррекции осуществляется определение величин поправок к оценкам текущих значений параметров полета ЛА, формируемым БКУ ЛА.
4. Осуществляется получение кадров первичного рабочего РЛИ ОУМ с использованием CAP в системе координат «доплеровская частота - дальность» с учетом поправок к оценкам текущих значений параметров полета ЛА, формируемым БКУ ЛА.
5. Производится преобразование кадров первичного рабочего РЛИ с использованием выражений (8) и (9) из системы координат «доплеровская частота - дальность» в НЗСК ОУМ с учетом поправок к оценкам текущих значений параметров полета ЛА, формируемым БКУ ЛА.
6. Осуществляется формирование рабочего РЛИ ОУМ на основе некогерентного сложения кадров рабочих РЛИ.
7. Производится взаимокорреляционная обработка эталонного и рабочего РЛИ и определяется положение максимума ВКФ.
8. Определяются плановые поправки к координатам ЛА в НЗСК ОУМ по координатам максимума в матрице ВКФ и соответствующие поправки к координатам ЛА в системе координат, в которой осуществляется навигация ЛА.
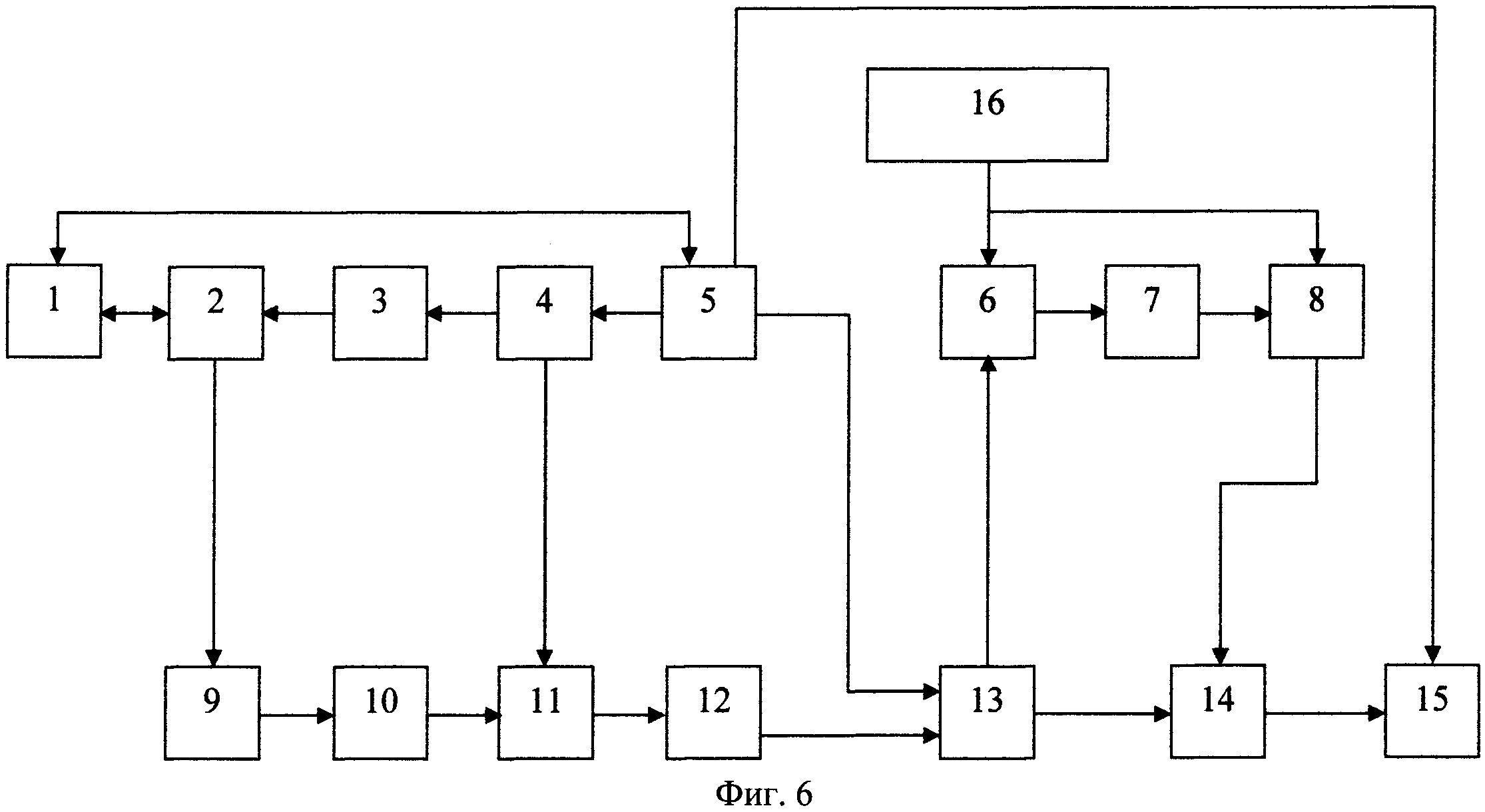
На фиг.6 представлена упрощенная структурная схема возможного варианта БРЛС, реализующей предлагаемый способ навигации ЛА по радиолокационным изображениям земной поверхности, где:
1 - моноимпульсная антенна БРЛС;
2 - переключатель прием-передача БРЛС;
3 - передатчик БРЛС;
4 - синхронизатор БРЛС;
5 - цифровое устройство управления БРЛС;
6 - формирователь поправок к оценкам текущих значений параметров полета ЛА, формируемым БКУ;
7 - блок запоминания поправок к оценкам текущих значений параметров полета ЛА, формируемым БКУ;
8 - вычислитель уточненных оценок текущих значений параметров полета ЛА;
9 - когерентный приемник БРЛС;
10 - многоканальный аналого-цифровой преобразователь;
11 - мнококанальный перемножитель принятого сигнала и опорной функции;
12 - блок преобразования Фурье;
13 - блок распределения РЛИ;
14 - формирователь рабочих РЛИ в НЗСК;
15 - блок вычисления максимума ВКФ и определения поправок к плановым координатам ЛА;
16 - бортовой комплекс управления ЛА.
Представленный на фиг.6 вариант БРЛС, реализующей предлагаемый способ навигации ЛА по радиолокационным изображениям земной поверхности, функционирует следующим образом.
При достижении точки коррекции траектории полета ЛА моноимпульсная антенна 1 под управлением, поступающим от цифрового устройства управления 5 БРЛС, устанавливается по направлению визирования заданного участка местности. Моноимпульсная антенна осуществляет излучение зондирующих радиолокационных сигналов, поступающих через переключатель приема-передачи 2 от передатчика 3, управляемого синхронизатором 4 БРЛС, а также прием отраженных сигналов, обеспечивая их пространственную селекцию. Через переключатель приема-передачи 2 принимаемые сигналы поступают на вход приемника 9 БРЛС, с квадратурных выходов которого поступают на вход многоканального аналого-цифрового преобразователя 10. Преобразованные сигналы перемножаются с опорной функцией, поступающей из цифрового устройства управления 5 БРЛС, в блоке перемножения 11, с целью осуществления фокусировки синтезированного радиолокационного изображения наблюдаемого участка земной поверхности, формируемого блоком преобразования Фурье 12 в координатах «доплеровская частота - дальность». Данное радиолокационное изображение через блок распределения 13 поступает в формирователь поправок 6 к оценкам текущих значений вектора скорости и высоты полета ЛА, формируемым бортовым комплексом управления 16 летательного аппарата. Формирование поправок к оценкам составляющих вектора скорости может осуществляться с использованием алгоритма, описанного в [3]. Оценка относительной высоты полета ЛА может быть получена с использованием алгоритма, описанного в [4]. Сформированные значения поправок сохраняются в блоке 7 запоминания поправок к оценкам текущих значений параметров полета ЛА, формируемым БКУ 16. С использованием данных поправок и значений оценок текущих параметров полета ЛА, поступающих из БКУ 16, вычислитель 8 осуществляет уточнение этих оценок и их выдачу в формирователь 14 рабочих РЛИ в НЗСК, в который также из блока распределения 13 поступают кадры первичных рабочих РЛИ наблюдаемых участков местности в системе координат «доплеровская частота-дальность». Из формирователя 14 рабочие РЛИ, представленные в НЗСК, поступают в блок 15, в котором осуществляется вычисление максимума ВКФ рабочего РЛИ и эталонного РЛИ, поступающего из цифрового устройства управления 5, и по положению максимума ВКФ осуществляется формирование коррекций плановых координат ЛА.
Предлагаемый способ навигации ЛА по радиолокационным изображениям земной поверхности прошел математическое моделироваение и экспериментальную апробацию.
Результаты исследований подтвердили работоспособность предлагаемого способа навигации ЛА по радиолокационным изображениям земной поверхности.
Предлагаемый способ навигации ЛА по радиолокационным изображениям земной поверхности позволяет обеспечить высокую точность навигации ЛА с помощью бортовых радиолокационных средств.
Использование предлагаемого способа не накладывает никаких дополнительных ограничений на элементную базу и не предъявляет никаких существенных требований к быстродействию и объему памяти вычислителей БРЛС.
Источники информации
1. Система управления беспилотным летательным аппаратом. Патент РФ №2189625 от 20.09.2002, MПК G05D 1/12, F41G 7/36.
2. Способ навигации летательного аппарата по радиолокационным изображениям земной поверхности с использованием цифровых моделей местности. Патент РФ №2364887 от 25.09.2007, МПК G01S 13/90 - прототип.
3. Козаев А.А., Колтышев У.У., Фролов Ф.Ю., Янковский В.Т. Алгоритм доплеровского измерения скорости в РЛС с синтезированной апертурой // Радиотехника, 2005, №6, c.13.
4. Патент США US №5430445, 12.31.1992, G01S 13/90.
5. Бабич О.А., Доброленский Ю.П., Козлов М.С. и др. Авиационные приборы и навигационные системы. / Под ред. О.А.Бабича. - М.: ВВИА им проф. Н.Е.Жуковского, 1981.
Способ навигации летательного аппарата по радиолокационным изображениям земной поверхности, заключающийся в том, что определение навигационных ошибок бортового комплекса управления летательного аппарата получают путем оценки положения максимума двумерной функции, отражающей взаимную корреляцию эталонного и рабочего радиолокационных изображений опорных участков местности, причем рабочие радиолокационные изображения опорных участков формируют в процессе движения летательного аппарата с помощью бортовой радиолокационной станции с синтезированием антенного раскрыва, отличающийся тем, что формирование как эталонных, так и рабочих радиолокационных изображений, а также их взаимокорреляционную обработку осуществляют в нормальной земной системе координат, начало координат которой совмещают с точкой прицеливания на опорном участке местности, а оси координат ориентируют в соответствии с условиями навигационной задачи, при этом в каждой точке коррекции осуществляют определение величин поправок к значениям параметров полета, измеряемых бортовым комплексом управления летательного аппарата, формируют кадры первичных рабочих радиолокационных изображений опорного участка местности в системе координат «доплеровская частота - дальность» с учетом определенных величин поправок к значениям параметров полета, формируемым бортовым комплексом управления летательного аппарата, осуществляют преобразование кадров первичных рабочих радиолокационных изображений опорного участка местности из системы координат «доплеровская частота - дальность» в нормальную земную систему координат опорного участка местности, осуществляют формирование рабочего радиолокационного изображения опорного участка местности на основе некогерентного суммирования кадров первичных рабочих радиолокационных изображений, в каждой точке коррекции при изменении взаимного относительного положения рабочего и эталонного радиолокационных изображений осуществляют взаимокорреляционную обработку эталонного и рабочего радиолокационных изображений опорного участка местности в нормальной земной системе координат опорного участка местности, по результатам которой по координатам максимума двумерной взаимокорреляционной функции рабочего и эталонного радиолокационных изображений определяют коррекции плановых координат летательного аппарата относительно опорного участка местности.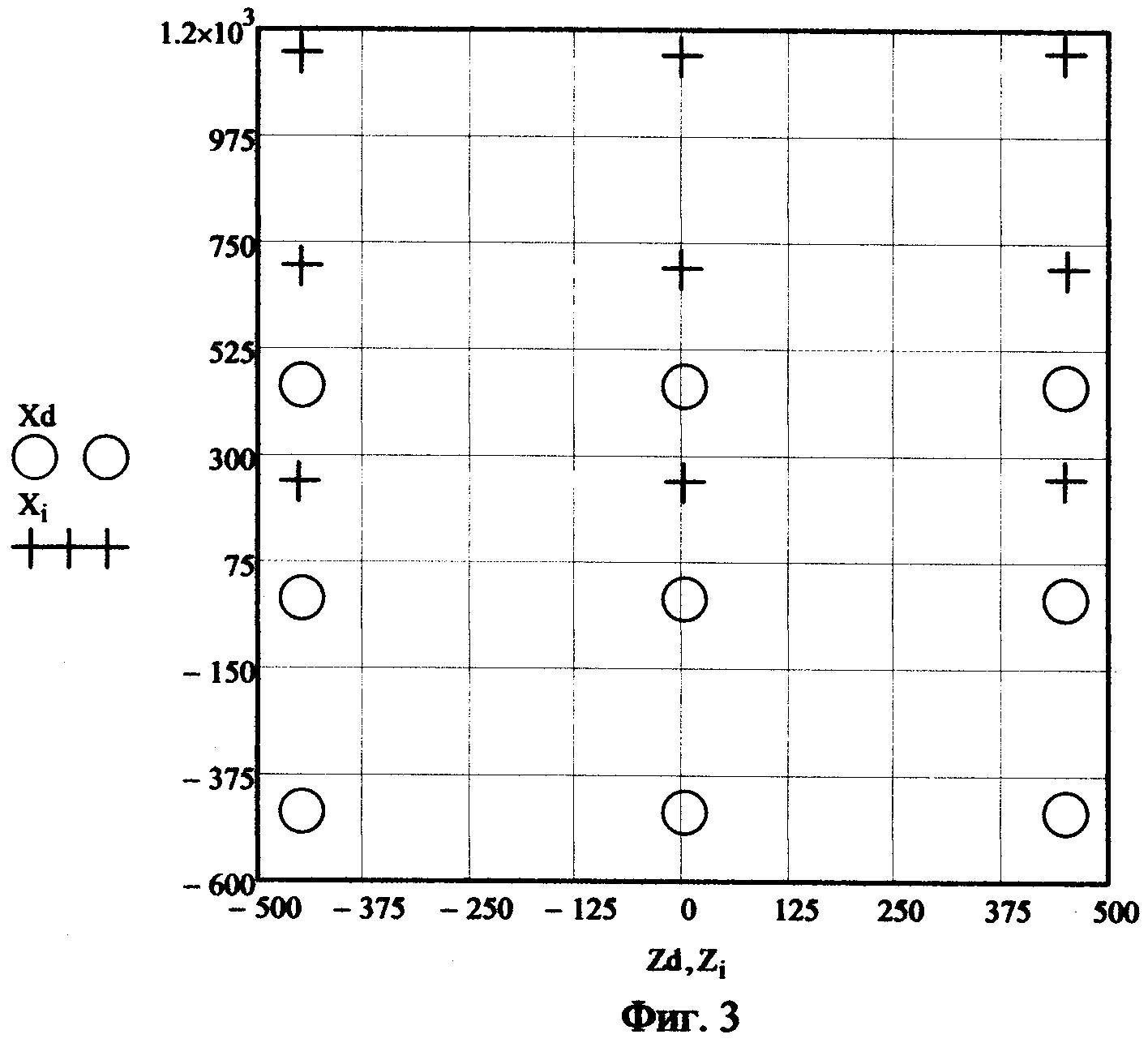
Способ измерения влажности
Чувствительный элемент для измерения температуры
Устройство для усиления сверхширокополосного сигнала
Способ оценки высоты полета летательного аппарата по радиолокационным изображениям земной поверхности
Самолет дальнего радиолокационного обнаружения корабельного базирования
Способ приведения летательного аппарата к наземному объекту
Способ наведения летательных аппаратов на наземные объекты
Устройство приготовления поверочных газовых смесей
Способ определения в опытовом бассейне в прямом движении аэродинамических характеристик горизонтального оперения экраноплана
Рефлекторная антенна френеля
Способ измерения влажности
Чувствительный элемент для измерения температуры
Устройство для усиления сверхширокополосного сигнала
Способ оценки высоты полета летательного аппарата по радиолокационным изображениям земной поверхности
Самолет дальнего радиолокационного обнаружения корабельного базирования
Способ приведения летательного аппарата к наземному объекту
Способ наведения летательных аппаратов на наземные объекты
Устройство приготовления поверочных газовых смесей
Способ определения в опытовом бассейне в прямом движении аэродинамических характеристик горизонтального оперения экраноплана
Рефлекторная антенна френеля

