Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДИНАМИЧЕСКОГО ОБЪЕКТА ПО ПРОСТРАНСТВЕННОЙ ТРАЕКТОРИИ
Вид РИД
Изобретение
Изобретение относится к области автоматического управления динамическими объектами, обеспечивающего их точное движение по заданной траектории, в частности многозвенными манипуляторами, мобильными роботами, подводными аппаратами и др.
Известен способ управления движением динамического объекта по траектории, включающий подачу на входы систем каждого канала управления программных воздействий, определяющих требуемое местоположение объекта на траектории в произвольный момент времени, оценку в каждом канале управления текущего отклонения от желаемого, задаваемого сигналами программных воздействий каждого канала, использование в каждом канале соответствующего текущего отклонения для получения корректирующих сигналов управления, уменьшающих величины этих текущих отклонений от сигналов программных воздействий, причем сигналы всех программных воздействий учитывают и используют при формировании в каждом канале управления дополнительных корректирующих сигналов управления для дополнительного уменьшения текущих отклонений от сигналов программных воздействий [Попов Е.П. Теория линейных систем автоматического регулирования и управления. - М.: Наука, 1978, с.144-145].
Недостатком известного способа управления является невысокая точность при управлении объектом по программным траекториям, если параметры этого объекта за счет взаимодействия с окружающей средой и эффектов взаимовлияния между всеми его степенями подвижности изменяются, а также, если его исполнительные элементы входят в режим насыщения, что не позволяет им в полной мере отрабатывать сигналы всех программных воздействий для обеспечения движений объекта по этим задаваемым траекториям.
Известен также способ управления движением динамического объекта по траектории, включающий подачу на входы систем каждого канала управления программных воздействий, определяющих требуемое местоположение объекта на траектории в произвольный момент времени, оценку в каждом канале управления текущего отклонения от желаемого, задаваемого сигналами программных воздействий каждого канала, использование в каждом канале соответствующего текущего отклонения для получения корректирующих сигналов управления, уменьшающих величины этих текущих отклонений от сигналов программных воздействий, причем сигналы всех программных воздействий учитывают и используют при формировании в каждом канале управления дополнительных корректирующих сигналов управления для дополнительного уменьшения текущих отклонений от сигналов программных воздействий, причем скорость движения динамического объекта на конкретных участках траектории с помощью соответствующей одновременной коррекции сигналов программных воздействий в каждом канале управления задают максимально возможной, обратно пропорциональной значению текущего отклонения местоположения этого объекта от заданного сигналами указанных программных воздействий местоположения на траектории движения объекта, но такой, чтобы при этом значения текущего отклонения местоположения этого объекта от заданного сигналами программных воздействий местоположения на траектории его движения ограничивались величиной, не превышающей заранее заданное для данного динамического объекта допустимое значение (Патент России №2406103. Бюл. №34, 2010).
Недостаток этого способа, являющегося наиболее близким к предлагаемому способу, заключается в том, что программные воздействия на каждый канал управления движением динамического объекта, определяющие предельно возможную скорость его движения по заданной траектории, корректируются с учетом информации о текущих ошибках в отработке этим объектом заданных программных сигналов, и не учитывают напрямую возможные входы некоторых исполнительных элементов в насыщения. Если динамический объект является инерционным, то быстрое устранение уже имеющихся и только что выявленных динамических ошибок в отработке предписанных траекторий, превышающих заданные допустимые значения, будет затруднено, особенно, если некоторые каналы управления этим объектом уже (пока) находятся в насыщении, поскольку насыщенные каналы не реагируют на поступающие сигналы управления.
Задачей изобретения является устранение указанного выше недостатка и, в частности, обеспечение требуемой высокой динамической точности предельно быстрого движения динамического объекта по задаваемой траектории не с учетом его текущей динамической ошибки, а с учетом возможных насыщений и входов в зоны нелинейности одного или нескольких каналов управления (исполнительных элементов). При этом максимально быстрое движение указанного объекта по произвольной траектории должно быть таким, чтобы один или несколько его исполнительных элементов постоянно находились на конечных участках их линейных зон в преднасыщенном состоянии, обеспечивая это предельно быстрое движение, при котором ни один из исполнительных элементов не входит в зону существенных нелинейных искажений поступающих входных сигналов или в зоны насыщений, а динамическая точность управления объектом в указанных линейных зонах работы всех исполнительных элементов обеспечивается уже имеющимися в каждом канале управления регуляторами, параметры которых рассчитаны на обеспечение качественной (точной) работы указанных объектов в этих линейных зонах исполнительных элементов.
Технический результат изобретения заключается в перемещении динамического объекта с предельно возможной скоростью по произвольным траекториям с высокой динамической точностью, обеспечиваемой типовыми корректирующими устройствами, за счет формирования таких программных сигналов, подаваемых на входы каждого канала управления объектом, которые обеспечат предельно напряженную работу одного или нескольких исполнительных элементов в соответствующих каналах управления, но только в их линейных зонах без входа в насыщение.
Поставленная задача решается тем, что способ управления движением динамического объекта по траектории, включающий подачу на входы систем каждого канала управления программных воздействий, определяющих требуемое местоположение объекта на траектории в произвольный момент времени, оценку в каждом канале управления текущего отклонения от желаемого, задаваемого сигналами программных воздействий каждого канала, использование в каждом канале соответствующего текущего отклонения для получения корректирующих сигналов управления, уменьшающих величины этих текущих отклонений от сигналов программных воздействий, причем сигналы всех программных воздействий учитывают и используют при формировании в каждом канале управления дополнительных корректирующих сигналов управления для дополнительного уменьшения текущих отклонений от сигналов программных воздействий, отличается тем, что скорость движения динамического объекта на конкретных участках траектории с помощью одновременной коррекции сигналов программных воздействий в каждом канале управления задают максимально возможную, увеличивая ее до тех пор, пока в наиболее нагруженном в текущий момент времени канале (или каналах) управления динамическим объектом величина (величины) входного сигнала, прямо пропорциональная скорости движения динамического объекта по траектории, еще не вводит соответствующий исполнительный элемент (элементы) наиболее нагруженного канала (каналов) управления в зону насыщения и в зону нелинейности его (их) характеристики, и уменьшая эту скорость прямо пропорционально величине входного сигнала, превышающей по модулю некоторое его (их) предельно допустимое значение.
Сопоставительный анализ признаков заявленного решения с признаками прототипа и аналогов свидетельствует о соответствии заявленного решения критерию "новизна".
Признаки отличительной части формулы изобретения обеспечивают решение следующих функциональных задач.
Признак «скорость движения динамического объекта на конкретных участках траектории с помощью одновременной коррекции сигналов программных воздействий в каждом канале управления задают максимально возможную, увеличивая ее до тех пор, пока в наиболее нагруженном в текущий момент времени канале (или каналах) управления динамическим объектом величина (величины) входного сигнала, прямо пропорциональная скорости движения динамического объекта по траектории, еще не вводит соответствующий исполнительный элемент (элементы) наиболее нагруженного канала (каналов) управления в зону насыщения и в зону нелинейности его (их) характеристики, и уменьшая эту скорость прямо пропорционально величине входного сигнала, превышающей по модулю некоторое его (их) предельно допустимое значение» обеспечивает выработку таких программных воздействий в каждом канале управления, которые дают возможность динамическому объекту достигать на конкретных участках траектории его движения максимально возможную скорость с учетом ограничения мощности и возможных нелинейных искажений конкретного наиболее нагруженного в данный момент времени исполнительного элемента (исполнительных элементов) конкретного канала (каналов) управления, сохраняя при этом требуемую динамическую точность управления.
Поскольку указанный входной сигнал одновременно со скоростью движения динамического объекта по траектории уменьшается прямо пропорционально величине этого сигнала, превышающей по модулю некоторое его (их) предельно допустимое значение, то величина скорости движения этого динамического объекта всегда ограничена.
Указание, на использование «величины входного сигнала, превышающей по модулю некоторое предельно допустимое значение», обеспечивает реализуемость способа, поскольку экспериментально несложно определить величину этого сигнала, при которой характеристики конкретного исполнительного элемента уже начинают отклоняться от линейных, для которых рассчитываются все используемые корректирующие устройства, и затем этот элемент входит в зону насыщения.
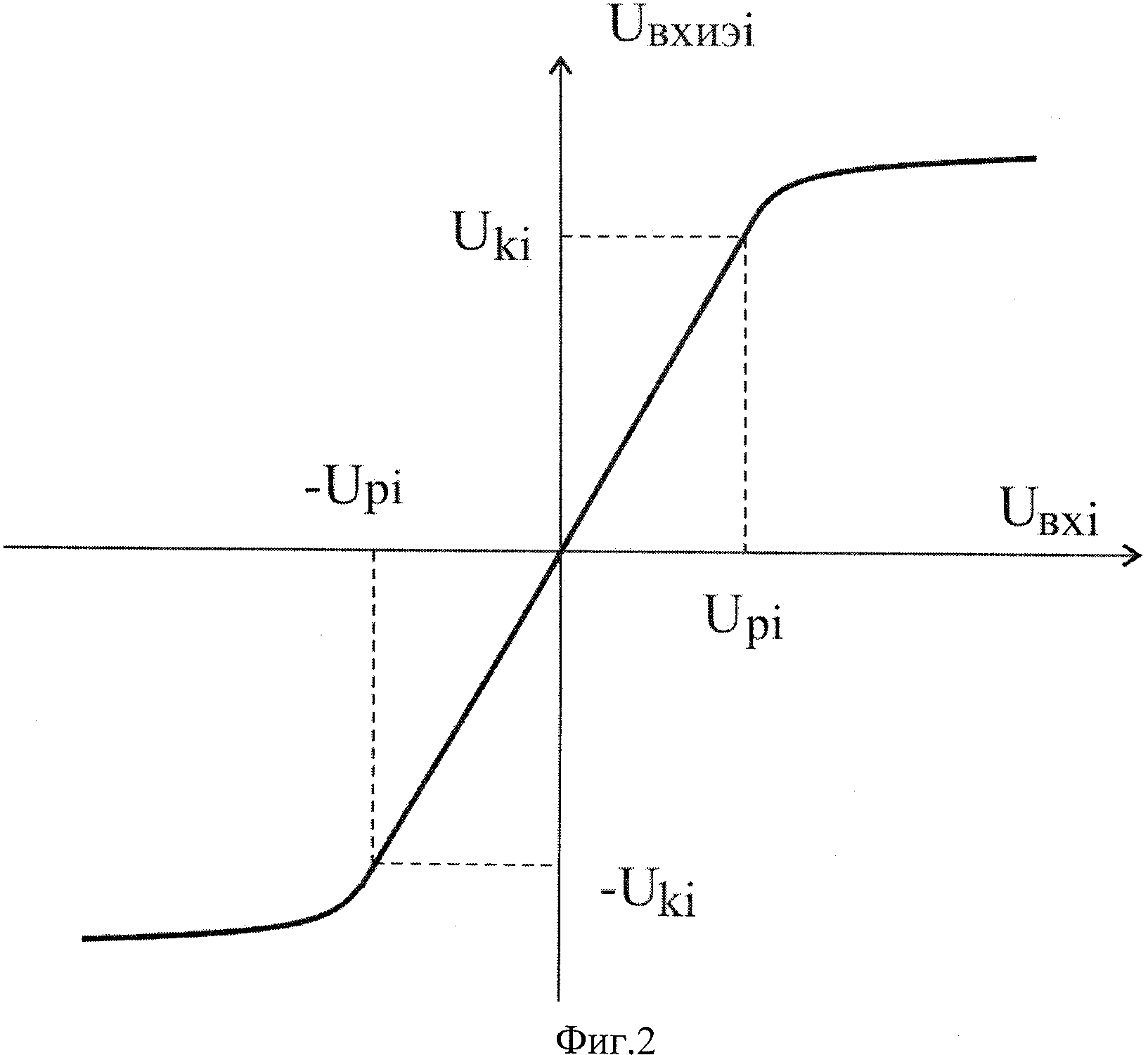
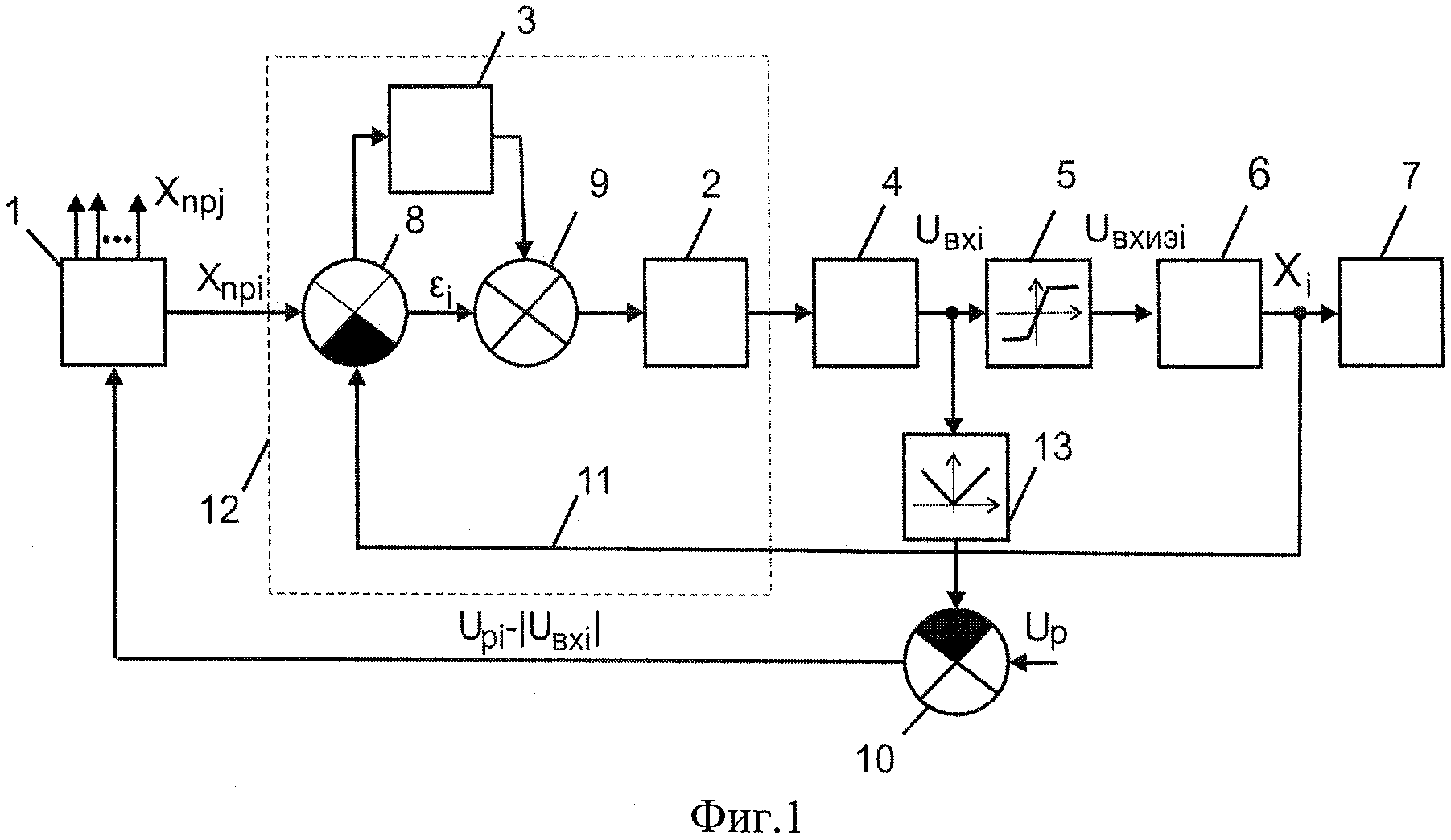
Заявленное изобретение иллюстрируется чертежами, где на фиг.1 показана схема одного канала управления динамическим объектом, реализующая заявленный способ; на фиг.2 схематически показана нелинейная характеристика исполнительного элемента.
На указанных чертежах показаны: устройство 1 программного управления; первое 2 и второе 3 корректирующие устройства; усилитель 4; звено 5, характеризующее нелинейную характеристику исполнительного элемента 6; объект 7 управления; первый 8, второй 9 и третий 10 сумматоры; линия 11 отрицательной обратной связи; система 12 управления i-го канала; блок 13 взятия модуля.
Кроме того, на чертежах показаны xпрi - сигнал программного управления рассматриваемого i-го канала; Xпрj - сигналы программных управлений, подаваемые на j-e каналы (i≠j,  ) объекта 7 управления; εi - текущая ошибка рассматриваемого i-го канала управления; хi - текущее значение выходной координаты i-го канала рассматриваемого объекта 7 управления; Uвxi и Uвхиэi - соответственно входные сигналы звена 5 и исполнительного элемента 6; Upi - положительное значение порогового входного сигнала наиболее нагруженного в текущий момент времени канала управления динамическим объектом 7, которое для каждого канала управления выбирается исходя из особенностей используемого исполнительного элемента 6; Uкi - критическое значение модуля сигнала Uвхиэi.
) объекта 7 управления; εi - текущая ошибка рассматриваемого i-го канала управления; хi - текущее значение выходной координаты i-го канала рассматриваемого объекта 7 управления; Uвxi и Uвхиэi - соответственно входные сигналы звена 5 и исполнительного элемента 6; Upi - положительное значение порогового входного сигнала наиболее нагруженного в текущий момент времени канала управления динамическим объектом 7, которое для каждого канала управления выбирается исходя из особенностей используемого исполнительного элемента 6; Uкi - критическое значение модуля сигнала Uвхиэi.
В качестве устройства 1 программного управления, первого 2 и второго 3 корректирующих устройств, усилителя 4, исполнительного элемента 6, первого 8, второго 9 и третьего 10 сумматоров, а также блока 13 взятия модуля использованы известные устройства и узлы соответствующего назначения, чьи технические и эксплуатационные характеристики соответствуют режимным параметрам работы объекта 7 управления.
Объектами 7 управления могут быть многозвенный манипулятор, мобильный робот, подводный и летательный аппараты, а также другие объекты с известными конструкциями, снабженные автоматической системой управления, включающей соответствующие измерители. Исполнительными элементами могут быть электродвигатели всех степеней подвижности роботов и манипуляторов, а также движители подводных аппаратов и др.
Следует отметить, что на отдельных участках движения объекта 7 по задаваемой нелинейной пространственной траектории точность управления, обеспечиваемая корректирующими устройствами 2 и 3, резко падает, когда при больших скоростях движения указанных объектов некоторые Uвхi, формируемые устройством 1, становятся такими, при которых соответствующие элементы 6 входят в зоны, где их характеристики становятся существенно нелинейными или даже попадают в зоны их насыщения. Это объясняется тем, что корректирующие устройства 2 и 3 рассчитываются только для линейных характеристик усилительных и исполнительных элементов. А при входе исполнительных элементов в насыщения объекты 7 вообще становятся неуправляемыми.
Для поддержания требуемой динамической точности движения объекта 7 с предельно возможной скоростью помимо использования системы 12 комбинированного управления (линии 11 отрицательной обратной связи и двух типовых корректирующих устройств 2 и 3) необходимо осуществлять дополнительное управление программными воздействиями (скоростью движения объекта) в соответствующих каналах управления так, чтобы в процессе этого управления при повышении скорости движения ни один исполнительный элемент 6 во всех каналах управления не вошел не только в зону насыщения, но и в зону сильных нелинейных искажений их характеристик, когда достичь требуемой точности управления для объектов 7 с большой инерцией не удается даже ценой резкого снижения программной скорости движения, когда ошибка управления уже достигла большой величины и когда, находясь в насыщении или работая с сильно искаженными сигналами, некоторые исполнительные элементы 6 уже неспособны правильно реагировать на соответствующие сигналы управления.
В результате появляется необходимость использования информации о приближении всех исполнительных элементов 6 объекта 7 к зонам их нелинейностей (зонам насыщения) (см. Фиг.2). При этом скорость движения объекта 7 по траектории должна снижаться заранее до появления большой ошибки управления, когда для ее уменьшения уже потребуется затратить много времени, в течение которого она к тому же может продолжать расти, если некоторые исполнительные элементы 6 уже вошли в насыщение.
То есть необходимо создать такой способ управления, при котором объекты 7 должны двигаться с такой максимально возможной скоростью, при которой один или несколько его исполнительных элементов 6 (возможно поочередно - в зависимости от траектории движения) всегда должны находиться вблизи зоны нелинейности или насыщения, не заходя далеко в эти зоны и быстро реагируя на сигналы управления в соответствующих каналах путем снижения программной скорости движения объекта 7 еще до заметного увеличения ошибок управления. Это и позволяет сделать предлагаемый способ.
Заявленный способ реализуется следующим образом.
При движении динамического объекта 7 по задаваемой нелинейной пространственной траектории допустимая величина ошибки этого движения обеспечивается введением систем 12 управления: двух корректирующих устройств 2 и 3, а также линий 11 отрицательных обратных связей, но только в том случае, когда все его исполнительные элементы 6 работают в линейной зоне без входа в насыщение. При этом скорость движения объекта 7 устройством 1 программного управления будет увеличиваться, если все разности  положительны. Если же некоторые входные сигналы указанных элементов начинают превышать пороговые значения Upi, за которыми начинаются зоны нелинейностей или даже зоны насыщения этих элементов, то скорость движения объекта 7 будет снижаться устройством 1 прямо пропорционально отрицательной величине , повышая тем самым динамическую точность управления объектом 7.
положительны. Если же некоторые входные сигналы указанных элементов начинают превышать пороговые значения Upi, за которыми начинаются зоны нелинейностей или даже зоны насыщения этих элементов, то скорость движения объекта 7 будет снижаться устройством 1 прямо пропорционально отрицательной величине , повышая тем самым динамическую точность управления объектом 7.
Опорный подшипниковый узел
Способ подводного массажа
Способ производства йогурта
Самонастраивающийся электропривод манипулятора
Способ работы системы теплоснабжения
Котел водогрейный прямоугольного поперечного сечения
Топка водогрейного котла
Судовое рулевое устройство
Полуфабрикат мясорастительный рубленый
Состав для производства шоколада
Состав для приготовления хлеба из пшеничной муки
Самонастраивающийся электропривод
Самонастраивающийся электропривод
Способ дезактивации радиоактивных отходов
Способ получения октагалактуронида
Способ получения гептагалактуронида
Водогрейный котел
Конвективный блок водогрейного котла
Котел водогрейный прямоугольного поперечного сечения
Способ оценки здоровья морских двустворчатых моллюсков и состояния среды их обитания

