Результат интеллектуальной деятельности: ЭЛЕКТРОННЫЙ БЛОК ДВУХКАНАЛЬНОЙ ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКИ САМОНАВЕДЕНИЯ
Вид РИД
Изобретение
Предлагаемое изобретение относится к области разработки систем управления вращающимися по углу крена беспилотными летательными аппаратами и может быть использовано в комплексах управляемого артиллерийского вооружения и других комплексах вооружения, в которых на конечном участке траектории осуществляется самонаведение методом пропорциональной навигации.
Известен электронный блок двухканальной лазерной полуактивной головки самонаведения (ГСН) [152-мм выстрел 3ВОФ64 (3ВОФ93) с осколочно-фугасным управляемым снарядом 3ОФ39 и полным переменным (уменьшенным переменным) зарядом. Техническое описание и инструкция по эксплуатации. М.: Военное издательство, 1990, пп.7.4.4 (стр.39), 7.5.5 (стр.56)], включающий схему широтно-импульсной модуляции (ШИМ) сигналов, управляющую четырьмя выходами рулевым приводом снаряда, подключаемый первым и вторым входами электронного блока к первому и второму выходам фотоприемного устройства (ФПУ); сумматор, подключаемый первым входом к первому входу электронного блока, вторым входом - к третьему входу электронного блока - сигналу «Компенсация» инерциального гироскопа, выходом к первому входу коррекции гироскопа головки самонаведения, вторым входом электронного блока к второму входу коррекции гироскопа, причем схема ШИМ формирует прямоугольные импульсы постоянной амплитуды, ширина которых определяется в момент прихода импульсов сигналов ФПУ и зависит от величины сигналов на входах схемы ШИМ.
Реальный электронный блок осуществляет обработку сигналов с четырех периферийных и четырех внутренних площадок ФПУ. Эта обработка в прототипе и предлагаемом изобретении осуществляется одинаково, поэтому в настоящем изобретении рассматривается электронный блок, на первый и второй входы которого поступают два сигнала, полученные в результате обработки сигналов ФПУ. Эти сигналы обозначены как «сигналы ФПУ».
Известный электронный блок вырабатывает импульсные амплитудно-модулированные сигналы коррекции гироскопа ГСН и широтно-импульсно-модулированные сигналы управления рулевым приводом (РП). В системе управления снарядом, в которую входит прототип, компенсация влияния силы тяжести осуществляется посредством формирования сигнала «компенсация», который поступает в одну из обмоток коррекции гироскопа ГСН, что вызывает разворот ротора гироскопа с ФПУ вниз, увеличивая составляющую сигналов ФПУ, направленную вверх, кроме того, сигнал «компенсация» логически суммируется с сигналами управления РП, формируемыми аппаратурой, не входящей в электронный блок ГСН. При логическом суммировании сигнала «Компенсация», формируемого вне электронного блока, и сигнала управления РП с выхода электронного блока (в отличие от алгебраического суммирования в электронном блоке) отсутствует возможность изменения величины команды компенсации силы тяжести, поступающей непосредственно на вход РП. Недостатком прототипа является также скачок сигналов управления в начале самонаведения, особенно при наличии существенного начального рассогласования между осью ГСН и линией визирования цели. Скачок сигнала управления может привести к увеличению угла атаки снаряда и достижению ротором гироскопа ГСН упора вследствие ограничения угла прокачки. Кроме того, в связи с необходимостью улучшения динамических характеристик системы управления возникает потребность в реализации обратных связей по угловой скорости продольной оси снаряда для обеспечения демпфирования колебаний снаряда относительно центра тяжести, при этом электронный блок должен осуществлять суммирование сигналов ФПУ, сигнала «Компенсация» и сигналов датчиков угловых скоростей (ДУС).
Функционирование сизвестного блока поясняет схема, представленная на фиг.1.
На фиг.1 обозначено:
1 - сумматор 1 (Сум. 1);
2 - схема широтно-импульсного преобразования сигналов (ШИМ).
Электронный блок в прототипе функционирует следующим образом. На первый (Вход 1) и второй (Вход 2) входы блока поступают сигналы ФПУ, которые представляют собой последовательности импульсов постоянной частоты и длительности, амплитуда импульсов зависит от величины угла рассогласования между линией визирования цели и осью ГСН. На третий вход (Вход 3) поступает сигнал «Компенсация», частота которого равна частоте вращения снаряда по крену. На первый вход сумматора 1 поступает сигнал с первого входа электронного блока, на второй вход сумматора 1 - сигнал «Компенсация» с третьего входа электронного блока. Сигнал с выхода сумматора 1 поступает на первый вход «коррекция гироскопа ГСН». На второй вход «коррекция гироскопа ГСН» поступает сигнал с второго входа электронного блока. На первый и второй входы схемы ШИМ поступают сигналы с первого и второго входов электронного блока. Четыре выхода схемы ШИМ управляют рулевым приводом снаряда.
Задачей предлагаемого изобретения является разработка электронного блока, позволяющего обеспечить возможность изменения величины сигнала компенсации влияния силы тяжести, поступающего непосредственно на вход РП, ограничить сигналы ФПУ и компенсации влияния силы тяжести, поступающие на вход РП в начале самонаведения, ввести обратную связь по угловой скорости продольной оси снаряда при наличии на борту снаряда датчиков угловой скорости снаряда.
Решение поставленной задачи достигается тем, что в электронный блок двухканальной лазерной полуактивной головки самонаведения, подключаемый первым и вторым входами к первому и второму выходам фотоприемного устройства, содержащий схему широтно-импульсной модуляции (ШИМ) сигналов, управляющую четырьмя выходами рулевым приводом снаряда, первый сумматор, соединенный первым входом с первым входом электронного блока, вторым входом - с третьим входом электронного блока - сигналом «Компенсация» инерциального гироскопа, а выходом - с первым входом коррекции гироскопа головки самонаведения, при этом второй вход коррекции гироскопа соединен со вторым входом электронного блока, введены последовательно соединенные первая схема линейного нарастания (СЛН1), второй сумматор, вторая схема линейного нарастания (СЛН2) и третий сумматор, выход которого соединен с первым входом схемы ШИМ, последовательно соединенные третья схема линейного нарастания (СЛН3) и четвертый сумматор, выход которого соединен с вторым входом схемы ШИМ, а также четвертая схема линейного нарастания (СЛН4), подключаемая входом к третьему входу электронного блока, а выходом - к второму входу второго сумматора, при этом входы СЛН1 и СЛН3 подключены соответственно к первому и второму входам электронного блока, а вторые входы третьего и четвертого сумматоров соединены с первым и вторым выходами датчика угловых скоростей ДУС, являющимися соответственно четвертым и пятым входами электронного блока, причем схемы линейного нарастания обеспечивают ограничение амплитуды импульсов в течение заданного времени с минимального до максимального значений.
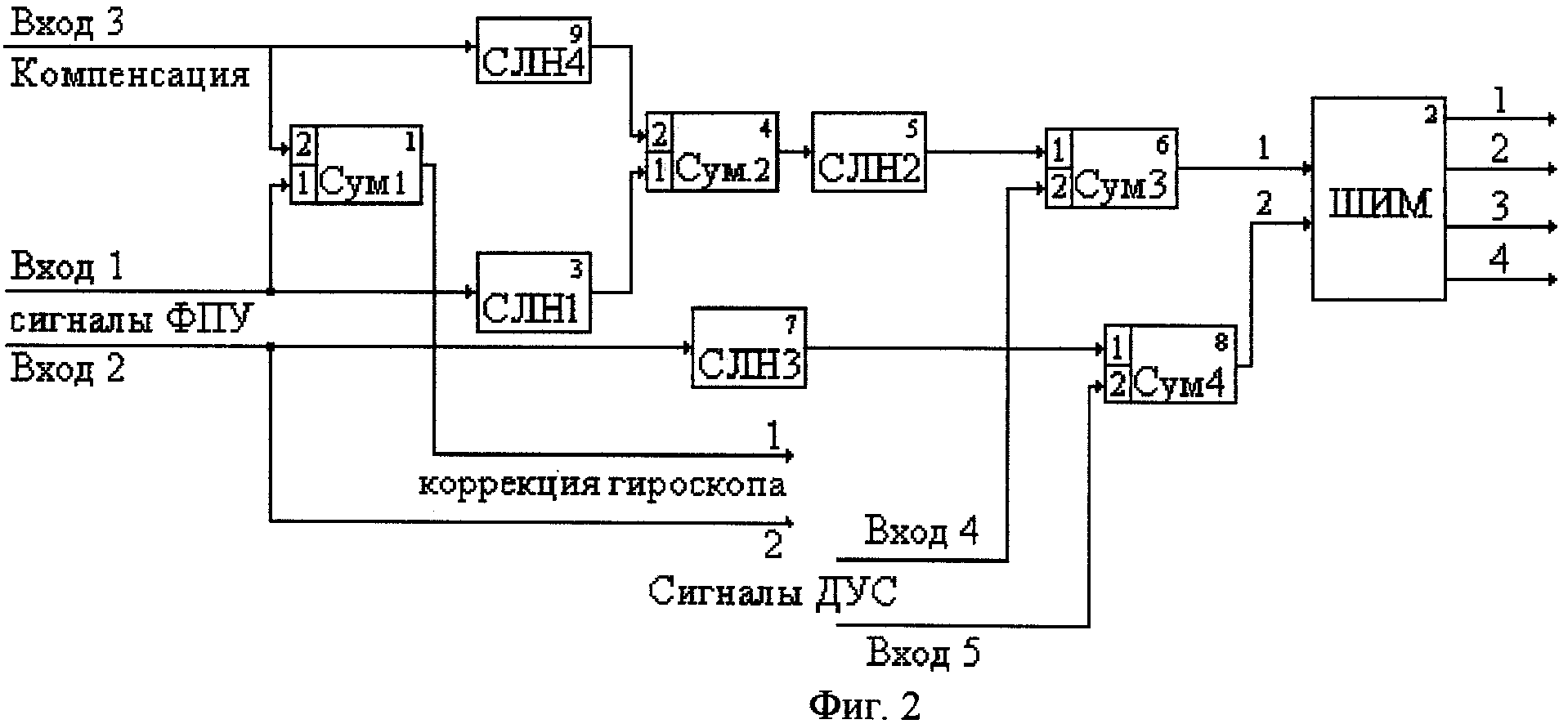
Функциональная схема предлагаемого электронного блока приведена на фиг.2.
На фиг.2 обозначено:
1 - первый сумматор;
2 - схема ШИМ;
3 - первая схема линейного нарастания сигналов СЛН1;
4 - второй сумматор Сум. 2;
5 - вторая схема линейного нарастания сигнала СЛН2;
6 - третий сумматор Сум. 3;
7 - третья схема линейного нарастания сигнала СЛН3;
8 - четвертый сумматор Сум. 4;
9 - четвертая схема линейного нарастания сигнала СЛН4.
Максимальная величина ограничения сигналов в схемах СЛН1, СЛН2 и СЛН3 Uогр1 определяется максимальной длительностью сигналов управления, формируемых схемой ШИМ, которая после окончания переходного процесса ГСН, определяющего длительность ограничения, остается постоянной. СЛН4 ограничивает величину сигнала «Компенсация» по модулю на уровне Uогр2, который в течение переходного процесса ГСН линейно возрастает от минимального значения до требуемой величины, а затем остается постоянным. Введены четвертый и пятый входы для сигналов датчиков угловых скоростей, а также третий и четвертый сумматоры, обеспечивающие суммирование сигналов ДУС с сигналами управления на входе схемы ШИМ: на второй вход третьего сумматора поступает сигнал с четвертого входа электронного блока, на первый вход третьего сумматора - сигнал с выхода схемы СЛН2, на второй вход сумматора 4 поступает сигнал с пятого входа электронного блока, на первый вход четвертого сумматора - сигнал с выхода схемы СЛН3, сигнал с выхода сумматора 3 поступает на первый вход схемы ШИМ, сигнал с выхода сумматора 4 поступает на второй вход схемы ШИМ, в момент переключения сигналов датчиков угловых скоростей осуществляется дополнительное определение ширины импульсов на выходах схемы ШИМ.
Схема ШИМ формирует импульсы постоянной амплитуды, длительность которых определяется в прототипе в момент изменения сигналов ФПУ с частотой, равной частоте следования сигналов ФПУ. Середины импульсов на выходах схемы ШИМ соответствуют серединам импульсов сигналов ФПУ. Импульс на первом выходе схемы ШИМ формируется при условии, что сигнал на первом входе схемы ШИМ является положительным, длительность импульса пропорциональна величине сигнала на первом входе схемы ШИМ. Аналогично второй выход схемы ШИМ соответствует отрицательным сигналам на первом входе схемы ШИМ, третий выход - положительным сигналам на втором входе, четвертый выход - отрицательным сигналам на втором входе.
Поскольку, в отличие от прототипа, ширина выходных сигналов схемы ШИМ пересчитывается не только в моменты прихода сигналов ФПУ, но и в моменты переключения сигнала «Компенсация» и сигналов ДУС, сигналы на выходах схемы ШИМ в общем случае являются несимметричными относительно середин импульсов сигналов ФПУ. Сигналы с выходов схемы ШИМ поступают на соответствующие входы РП.
Введение второго сумматора позволяет суммировать первый сигнал ФПУ с сигналом «Компенсация», умноженным на требуемый коэффициент. При этом фактическая команда компенсации силы тяжести может при необходимости иметь любое требуемое значение от 0 до 2/π ≈ 0.637 единиц команды (ед. к.). При отсутствии второго сумматора сигнал «компенсация» логически суммируется с выходным сигналом электронного блока, в этом случае фактическая команда компенсации силы тяжести может принимать только определенные значения: 0 при отсутствии сигнала «компенсация», 1/π ед. к. при формировании сигнала «Компенсация» одного уровня (положительного или отрицательного), 2/π ед. к. при использовании обоих уровней (положительного и отрицательного) сигнала «Компенсация». Подача сигнала «Компенсация» на вход ШИМ и далее на вход РП через первый сумматор электронного блока невозможна, т.к. первый сумматор имеет отрицательный коэффициент передачи по сигналу «Компенсация», а на входе ШИМ сигнал «Компенсация» инвертироваться не должен, так как для компенсации влияния силы тяжести ось ротора гироскопа ГСН необходимо разворачивать вниз, а ось снаряда - вверх.
Необходимость дополнительного пересчета ширины импульсов на первом и втором выходах схемы ШИМ, соответствующих первому входу схемы ШИМ, при переключении сигнала «Компенсация» обусловлена тем, что в противном случае компенсация силы тяжести будет осуществляться с недопустимой фазовой ошибкой, возникающей вследствие того, что схема ШИМ реагирует на переключение сигнала «Компенсация» с запаздыванием, которое в среднем равно половине длительности сигналов ФПУ.
Схемы линейного нарастания необходимы для того, чтобы исключить увеличение углов атаки изделия в начале самонаведения и тем самым предотвратить достижение ротором гироскопа ГСН упора по углу прокачки.
Поясним необходимость реализации перед первым входом схемы ШИМ трех схем линейного нарастания: для сигнала ФПУ (СЛН1), для сигнала «Компенсация» (СЛН4) и для суммарного сигнала (СЛН2).
При отсутствии схемы СЛН1 сигнал «Компенсация» в начале самонаведения суммируется с сигналом ФПУ, который может значительно превышать линейную зону схемы ШИМ. Поэтому при промахе снаряда в момент начала самонаведения «сверху» (вектор скорости снаряда выше цели) компенсация силы тяжести в начале самонаведения практически не осуществляется и траектория снаряда проходит ниже, чем при наличии схемы СЛН1. В случае позднего захвата цели (например, из-за облачности), это может привести к промаху снаряда.
При отсутствии схемы СЛН4 ограниченный сигнал ФПУ в начале переходного процесса суммируется с неограниченным сигналом «Компенсация». В этом случае при существенном верхнем начальном промахе по первому входу схемы ШИМ формируется команда вверх, ограниченная схемой линейного нарастания суммарного сигнала СЛН2, а по второму входу - команда вниз, ограниченная схемой СЛН3, аналогичной СЛН1. При этом ось снаряда в начале самонаведения практически не разворачивается вниз, а ротор ГСН разворачивается вниз в направлении линии визирования цели под действием сигналов «коррекция гироскопа» электронного блока, что повышает вероятность выхода ротора ГСН на упор.
При отсутствии схемы линейного нарастания СЛН2 сигнал на входе ШИМ при совпадении знаков сигнала ФПУ и сигнала «Компенсация» может превышать требуемый уровень ограничения, что также повышает вероятность достижения ротором ГСН упора.
Сигналы ДУС, пропорциональные угловой скорости оси снаряда, вводимые в электронный блок таким образом, чтобы обратная связь по угловой скорости оси снаряда была отрицательной, не ограничиваются линейным нарастанием, так как эти сигналы всегда способствуют демпфированию колебаний оси снаряда и, следовательно, уменьшению вероятности достижения ротором ГСН упора.
Исследование показало, что частота передачи сигналов ДУС в электронный блок должна в два раза превышать частоту следования импульсов сигналов ФПУ. Целесообразно передавать сигналы ДУС в моменты прихода импульса сигнала ФПУ и в моменты, соответствующие серединам импульсов сигналов ФПУ. В моменты переключения сигналов ДУС, не совпадающие с моментами прихода импульсов сигналов ФПУ, необходимо осуществлять дополнительный пересчет ширины импульсов на выходах схемы ШИМ.
Схемы линейного нарастания реализованы аппаратными средствами однокристальной ЭВМ типа 1830ВЕ51 под управлением программного обеспечения.
Электронный блок двухканальной лазерной полуактивной головки самонаведения, подключаемый первым и вторым входами к первому и второму выходам фотоприемного устройства, содержащий схему широтно-импульсной модуляции (ШИМ) сигналов, соединенную четырьмя выходами с рулевым приводом снаряда, первый сумматор, соединенный первым входом с первым входом электронного блока, вторым входом - с третьим входом электронного блока - сигналом «Компенсация» инерциального гироскопа, а выходом - с первым входом коррекции гироскопа головки самонаведения, при этом второй вход коррекции гироскопа соединен со вторым входом электронного блока, отличающийся тем, что он снабжен последовательно соединенными первой схемой линейного нарастания (СЛН1), вторым сумматором, второй схемой линейного нарастания (СЛН2) и третьим сумматором, выход которого соединен с первым входом схемы ШИМ, последовательно соединенными третьей схемой линейного нарастания (СЛН3) и четвертым сумматором, выход которого соединен с вторым входом схемы ШИМ, а также четвертой схемой линейного нарастания (СЛН4), соединенной входом с третьим входом электронного блока, а выходом подключенной к второму входу второго сумматора, при этом входы СЛН1 и СЛН3 соединены соответственно с первым и вторым входами электронного блока, а вторые входы третьего и четвертого сумматоров соединены с первым и вторым выходами датчика угловых скоростей (ДУС), являющимися соответственно четвертым и пятым входами электронного блока, причем схемы линейного нарастания обеспечивают ограничение амплитуды импульсов в течение заданного времени с минимального до максимального значений.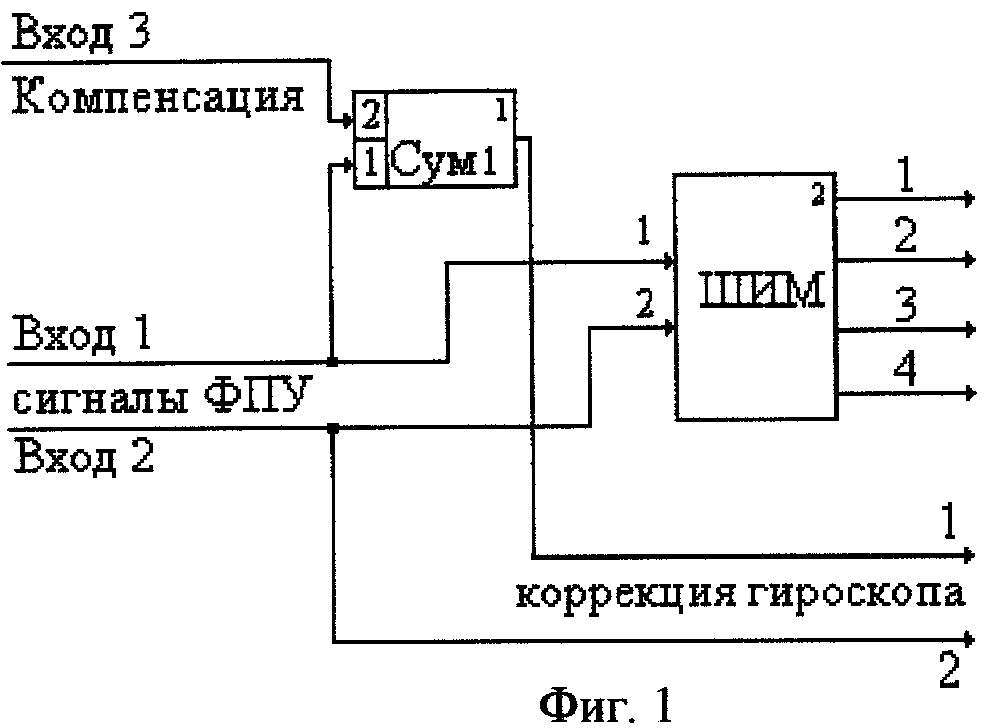
Космическая энергетическая установка с машинным преобразованием энергии
Способ стрельбы ракетами и артиллерийскими снарядами с лазерными полуактивными головками самонаведения и в телеметрическом исполнении
Способ установки излучения излучателя полупроводникового лазера и устройство установки излучения излучателя полупроводникового лазера (варианты)
Вакуумный стенд для огневых испытаний жидкостного ракетного двигателя космического назначения
Способ вывода ракеты в зону захвата цели головкой самонаведения и устройство для его осуществления
Гирокоординатор головки самонаведения
Способ прямого наведения вооружения на движущуюся цель
Способ телеуправления ракетой
Способ прямого наведения вооружения на цель (варианты) и устройство ориентирования пусковой установки вооружения
Способ ориентирования орудия
Способ управления ракетой и система наведения ракеты
Способ наведения управляемой ракеты и система наведения для его реализации
Броневая башня с защитными элементами
Способ защиты оптической системы ракетного комплекса и защитный барьер для его осуществления
Способ формирования команд управления на ракете, вращающейся по углу крена, система управления ракетой, способ преобразования импульсов на ракете, вращающейся по углу крена, и синус-косинусный преобразователь системы управления ракетой
Способ управления вращающимся снарядом и управляемый снаряд
Способ контроля параметров аппаратуры управляемой ракеты и автоматизированная система контроля для его осуществления
Способ наведения ракеты и оптико-электронная командная система наведения
Система наведения высокоточного оружия дальней зоны
Способ стрельбы управляемым снарядом с лазерной полуактивной головкой самонаведения (варианты)

