Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОГО СБОРА ТОМАТОВ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Изобретение относится к сельскохозяйственному машиностроению, в частности, к автоматизированным устройствам для уборки плодов овощных культур, а именно томатов, на основе технологий компьютерного зрения и технологий интеллектуального распознавания образов.
Уровень техники
Из уровня техники известны технические решения, обеспечивающие автоматизированный сбор плодов. При использовании таких устройств отсутствует необходимость в сортировке плодов, обеспечивается автономность процесса сбора урожая в течение светового дня, сокращаются трудозатраты работников.
Большинство известных роботов не имеют колес, которые бы могли поворачиваться на 360(вокруг своей оси, что снижает маневренность устройств в условиях ограниченного пространства в теплицах или на полях с узкими междурядьями. Более того, множество роботов-аналогов передвигаются в теплицах по отопительным трубам, используя их как рельсы. Повышенные требования роботов к ровности поверхности для передвижения сокращают универсальность их применения. Множество роботов используют круговое преобразование Хафа (http://wiki.technicalvision.ru/index.php/%D0%9F%D1%80%D0%B5%D0%BE%D0%B1%D1%80%D0%B0%D0%B7%D0%BE%D0%B2%D0%B0%D0%BD%D0%B8%D0%B5_%D0%A5%D0%B0%D1%84%D0%B0_%D0%B4%D0%BB%D1%8F_%D0%BF%D0%BE%D0%B8%D1%81%D0%BA%D0%B0_%D0%BE%D0%BA%D1%80%D1%83%D0%B6%D0%BD%D0%BE%D1%81%D1%82%D0%B5%D0%B9) для поиска томатов, хотя по скорости этот метод уступает методу скользящего окна в сверточной нейронной сети (https://elib.bsu.by/bitstream/123456789/191723/1/108-111.pdf). Качество фотографий при проезде робота по неровной поверхности может «смазываться» из-за тряски камеры.
Из уровня техники известен робот для сбора яблок, который ориентируется в садах с помощью машинного зрения и времяпролетной камеры. Робот оснащен микроконтроллером, ПЗС-камерой (сокр. от «прибор с зарядовой связью»), которая идентифицирует яблоки. Трехпальцевый манипулятор с 6-ю степенями свободы срывает яблоки с деревьев. Во избежание повреждений плодов и с целью повышения эффективности сбора, каждый захват манипулятора создан по принципу повторения человеческого указательного пальца. Для отрыва яблока от плодоножки манипулятор тянет его, двигаясь по принципу маятника. Для обнаружения яблок используется метод кругового преобразования Хафа (Circular Hough Transformation), выбранный исходя из округлой формы яблок. Однако яблоки, частично скрытые листвой, не выявляются этим методом, поэтому для их обнаружения применяется анализ больших двоичных объектов (Blob Analysis). Чтобы каждый раз не идентифицировать одно и то же яблоко, фрагменты которого видны камерой, используется алгоритм кластеризации, выясняющий, что все выявленные части принадлежат одному плоду. [Davidson J.R., Silwal A., Hohimer C.J., Karkee M., Mo C., Zhang Q. Proof-of-concept of a robotic apple harvester // 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016. - Pp.634-639. DOI: 10.1109/IROS.2016.7759119.]
Основной недостаток робота заключается в его низкой маневренности ввиду отсутствия средств всенаправленного хода.
Известно устройство сбора томатов, которое всасывает томаты с помощью генератора вакуума, подносимого к ним. Телескопический цилиндр, расширяя рукав генератора вакуума, облегчает попадание томатов через рукав в воздушный мешок. При вращении рукава происходит отделение плодов от стеблей и листьев, если они поступают в рукав вместе с томатами. На обнаружение томата роботу требуется 4 с, на перемещение рукава к томату - 12 с, на всасывание томата - 8 с и на возвращение рукава в исходное положение - 12 с.[Wang X.N., Wu P.H., Feng Q.C., Wang G.H. Design and test of tomatoes harvesting robot // Journal of Agricultural Mechanization Research. - 2016. - Vol.38(4). - Pp.94-98].
Недостаток устройства заключается в том, что генератор вакуума всасывает не только сами плоды, но и пыль, листья растений в результате низкой эффективности отделения плодов от листьев путем вращения рукава.
Известно устройство для сбора томатов с адаптивной под форму томатов рукой-манипулятором. Благодаря этой особенности, робот не повреждает хрупкие плоды в процессе сбора. В системе машинного зрения задействуется метод построения хорд, способный определять скопления нескольких томатов на одном растении, частично перекрытые листьями плоды, выявлять томаты на затемненных снимках. Чаша, всасывающая томаты, предназначена не для их полного засасывания по принципу пылесоса, а лишь для притягивания томата с целью его фиксации, чтобы затем пальцам манипулятора было легче схватить плод. Эта чаша размещается рядом с пальцами манипулятора. Томат срывается с растения силой натяжения, когда манипулятор движется по направлению к контейнеру робота. [Peter L., Reza E., Ting K.C., Chi Y.-T., Ramalingam N., Klingman M.H., Draper C. Sensing and End-Effector for a Robotic Tomato Harvester // 2004 ASAE Annual Meeting. Ottawa, ON, Canada. - 2004. - Pp.1-12].
Пальцы манипулятора выполнены из ABS-пластика, а он, имея преимущество в легкости, отличается низкой надежностью и повышенной хрупкостью, особенно в сравнении со сталью или алюминием. В связи с этим пальцы манипулятора имеют высокий риск повреждений с учетом нагрузки при сборе томатов. Робот не имеет системы охлаждения контейнера для сбора томатов, что может привести к их порче.
Известен робот для сбора томатов в теплицах, передвигающийся на 4-х колесах, используя автоматическую навигацию и объезжая препятствия. Для сбора томатов устройство задействует роботизированную руку с 4 степенями свободы и пальцы с 1 степенью свободы. В качестве основы интеллектуального устройства применены нейронные сети для задачи классификации плодов по степени зрелости. Реализация алгоритма распознавания томатов не требует большого объема памяти, высокой частоты процессора, что позволяет снизить стоимость разрабатываемого устройства, а также повысить точность распознавания фруктов. Его погрешность в процессе распознавания томатов составляет около 14%. Для поиска созревших томатов устройство использует метод нормализованной цветовой разницы при получении изображений в оттенках серого. Для сегментации изображений применяется алгоритм Отцу. Скорость сбора плодов - 15 с/ед. при точности обнаружения томатов - 86%. [Wang L.L., Zhao B., Fan J.W., Hu X.A., Wei S., Li X.S., Wei C.F. Development of a tomato harvesting robot used in greenhouse // International Journal of Agricultural and Biological Engineering. - 2017. - Vol.10(4). - Pp.140-149]; [Wang Z.H., Xun Y., Wang Y.K., Yang Q.H. Review of smart robots for fruit and vegetable picking in agriculture // International Journal of Agricultural and Biological Engineering. - 2022. - Vol.15(1). - P. 36]. Недостатком устройства является отсутствие системы охлаждения у контейнера для хранения собранных томатов. В этой связи существует риск порчи или ухудшения товарного качества томатов, особенно, если уборочные работы занимают продолжительное время и производятся в жаркую погоду или если теплица перегрета.
Наиболее близким по технической сущности к заявляемому изобретению является конструкция устройства для автоматизированного сбора томатов, раскрытая в публикации «Проектирование робототехнических манипуляторов с системой компьютерного зрения для сбора томатов» // Прикаспийский журнал: управление и высокие технологии. - 2020. - №3(51). - С.135-147, URL: https://www.elibrary.ru/item.asp?id=44189041. Известная мобильная робототехническая платформа представляет собой дистанционно управляемый манипулятор, оснащенный источником питания, камерой и системой оценки размеров плода, закрепленный на поворотном столике. Манипулятор также оснащен специализированным схватом и системой технического (компьютерного) зрения, которая представляет собой дополнительную видеокамеру и ультразвуковой дальномер, подключенные к блоку управления. Видеокамера и дальномер обладают определенным углом обзора и предназначены для обеспечения точного сближения схвата с плодом, расположенным на стебле растения. Робот для выявления томатов использует специальную программу определения границ плодов томатов и координат их центров на изображениях разрешением 800 на 600 пикселей. Методика цветовых фильтров позволяет определять местонахождение спелых томатов. Параметры цветового фильтра задаются с учетом освещенности в теплице и желаемой степени спелости томатов.
Недостатки прототипа выражаются в ограниченности применений данного устройства - робот функционирует только в рамках теплиц с ровным полом, поскольку колеса не способны преодолевать кочки и неровности на полях. Прототип не имеет системы стабилизации положения корпуса, в связи с чем высок риск тряски корпуса и камеры с последующим ухудшением качества изображений томатов. Контейнер для сбора томатов не охлаждается, что может вызвать снижение товарного качества томатов.
Таким образом, техническая проблема, решаемая посредством заявляемого изобретения, заключается в необходимости преодоления недостатков, присущих аналогам и прототипу, за счет создания автоматизированного устройства для сбора томатов, характеризующегося высокой надежностью и эффективностью сбора томатов не только в условиях теплиц, но и на открытых полях с неровным грунтом за счет обеспечения всенаправленного хода колес и наличия системы стабилизации платформы устройства.
Краткое раскрытие сущности изобретения
Технический результат, достигаемый при использовании изобретения, заключается в обеспечении стабилизации корпуса устройства в горизонтальном положении при повышении маневренности и проходимости устройства, что способствует более точному распознаванию томатов в результате стабилизации положения HD-камеры, распознающей зрелые томаты.
Устройство характеризуется также такими техническими преимуществами, как:
- повышением сохранности собранных томатов за счет внедрения системы охлаждения контейнера для их хранения в процессе сбора;
- улучшением видимости устройства в темное время суток за счет использования LED-габаритов;
- более надежным захватом томата за счет применения вакуумной помпы;
- большей точностью идентификации спелых томатов за счет применения сверточной нейронной сети на базе архитектуры YOLOv4;
- обеспечением сохранности собранных томатов за счет использования системы охлаждения контейнера для их хранения.
Технический результат достигается в том числе за счет конструкции подвески устройства, обеспечивающей горизонтальное положение корпуса в процессе перемещения по полю. Подобная система стабилизации положения корпуса помогает сохранять неподвижность HD-камеры, делающей фотоснимки томатов и поля, и тем самым обеспечивается высокое качество фотографий, достаточное для 95%-ной точности распознавания спелых томатов. У устройств-аналогов ввиду отсутствия такой системы стабилизации, фотоснимки и видео получаются менее четкими, что негативно влияет на точность идентификации спелых томатов.
Заявленный технический результат достигается тем, что в устройстве для автоматизированного сбора томатов, представляющем собой мобильную платформу, снабженную средствами передвижения и корпусом, внутри которого размещен блок управления, источник питания, а снаружи закреплен дистанционно управляемый манипулятор, оснащенный пальцевым захватом, камерой распознавания томатов и системой технического зрения, согласно техническому решению, на корпусе закреплен контейнер для сбора томатов, выполненный с возможностью размещения в нем охлаждающих элементов, а в качестве средств передвижения платформы использованы независимые мотор-колеса со всенаправленным ходом, закрепленные к платформе через подвеску, а в корпусе установлен бортовой компьютер, обеспечивающий распознавание и классификацию томатов по степени зрелости с помощью предустановленной сверточной нейронной сети, при этом подвеска представляет собой качающуюся тележку и включает поворотные стойки, соединенные с одной стороны, с мотор-колесами, а с другой стороны, с поворотными элементами подвески, которые, в свою очередь соединены с линейными актуаторами, закрепленными по бокам платформы. В качестве охлаждающих элементов могут быть использованы сухой лед или пакеты с хладагентом. Система технического зрения представляет собой видеокамеру и ультразвуковой дальномер, подключенные к блоку управления. Манипулятор снабжен вакуумной помпой. Устройство также снабжено навигационным устройством на базе GPS.
Краткое описание чертежей
Изобретение поясняется чертежами, где
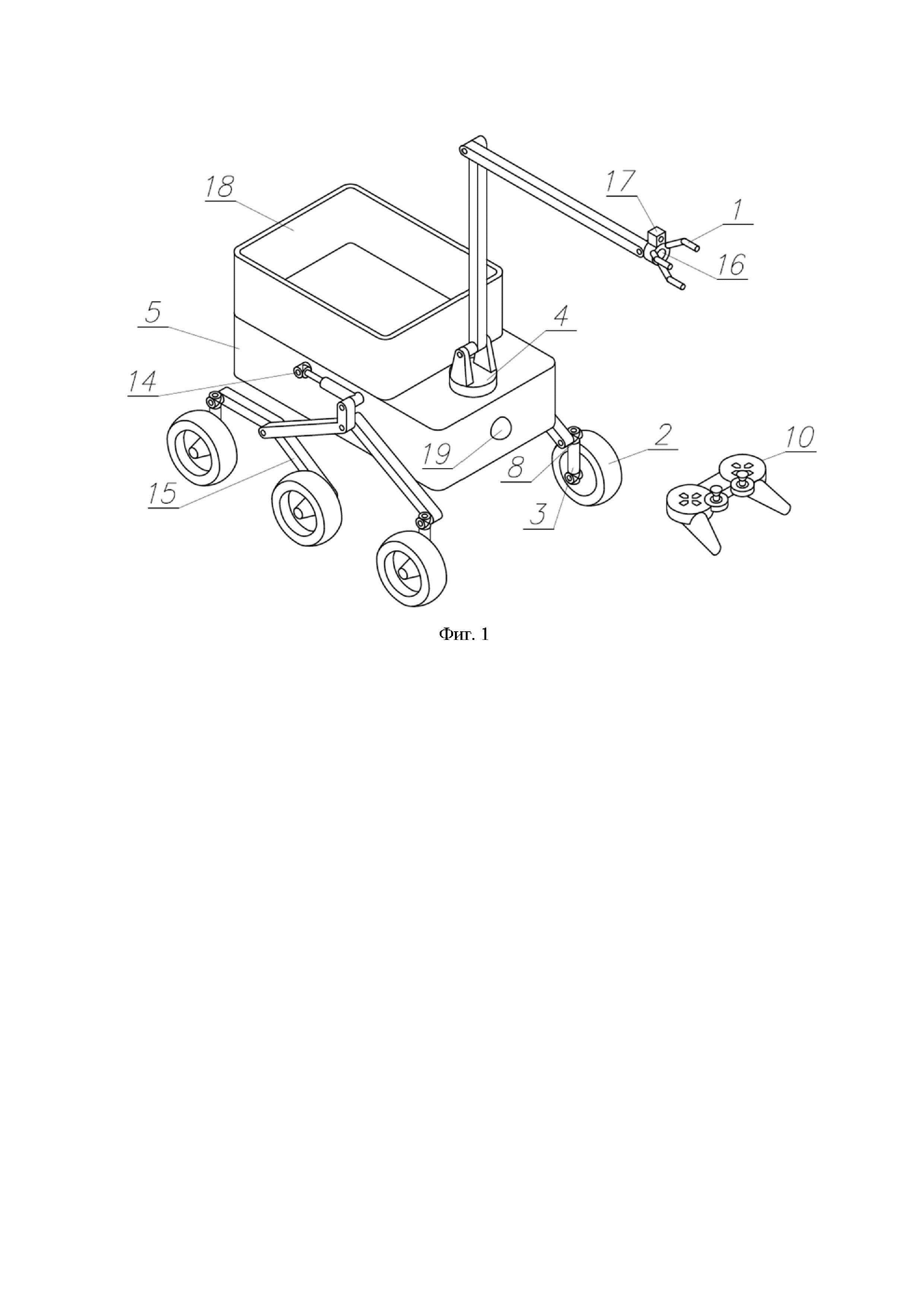
на фиг. 1 представлен общий вид заявляемого устройства,
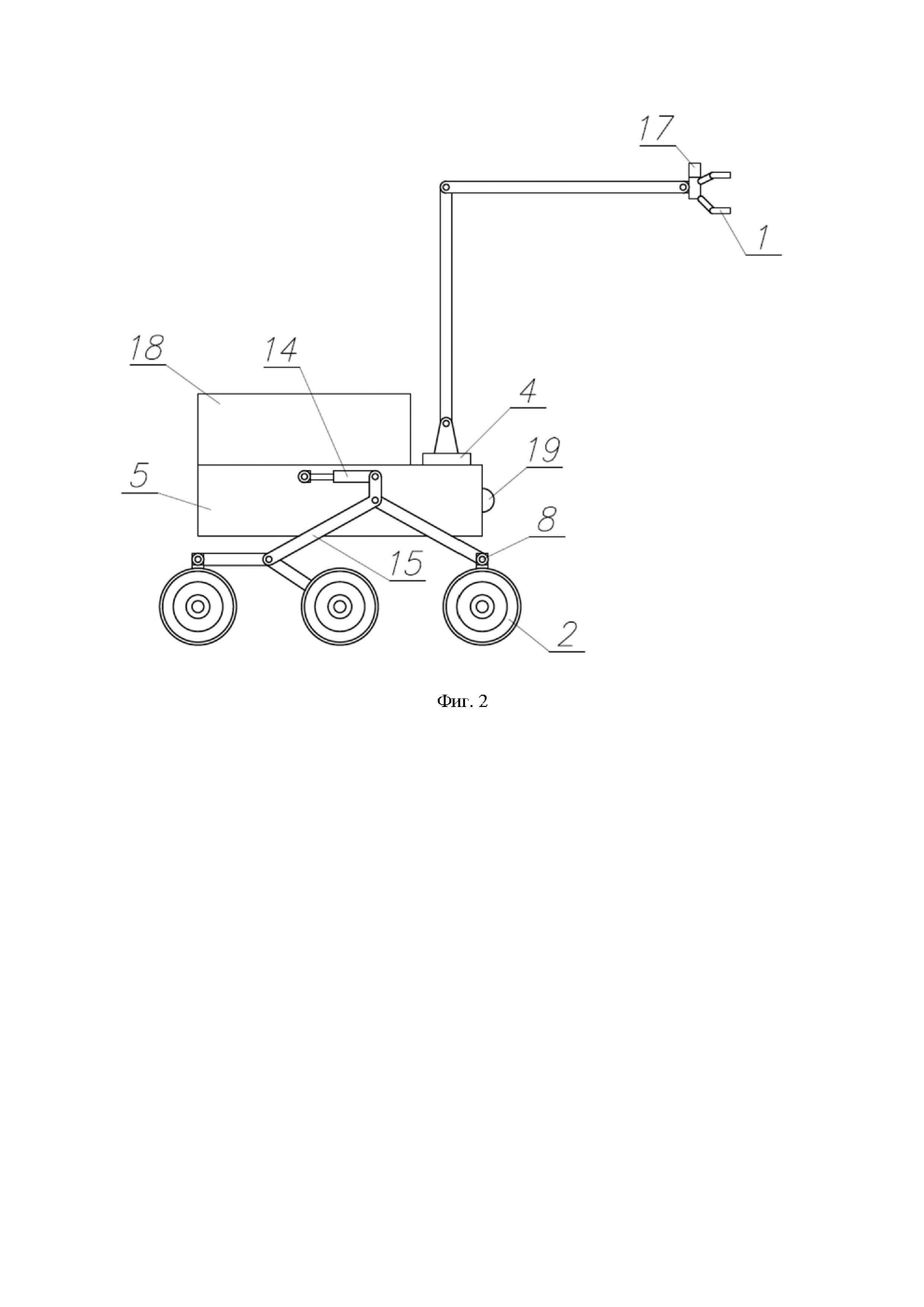
на фиг. 2 - вид на заявляемое устройство сбоку,
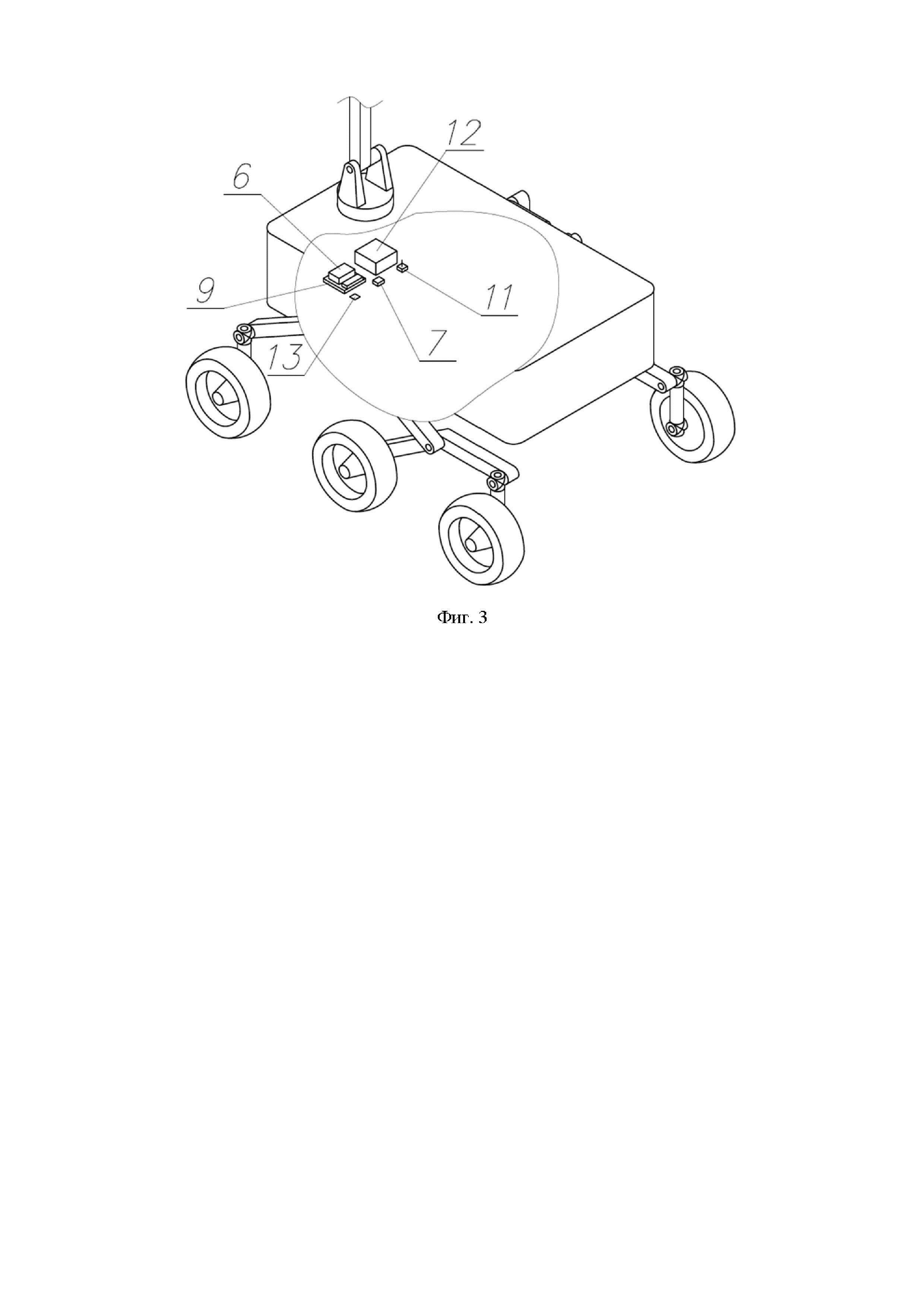
на фиг. 3 - внутренняя компоновка заявляемого устройства,
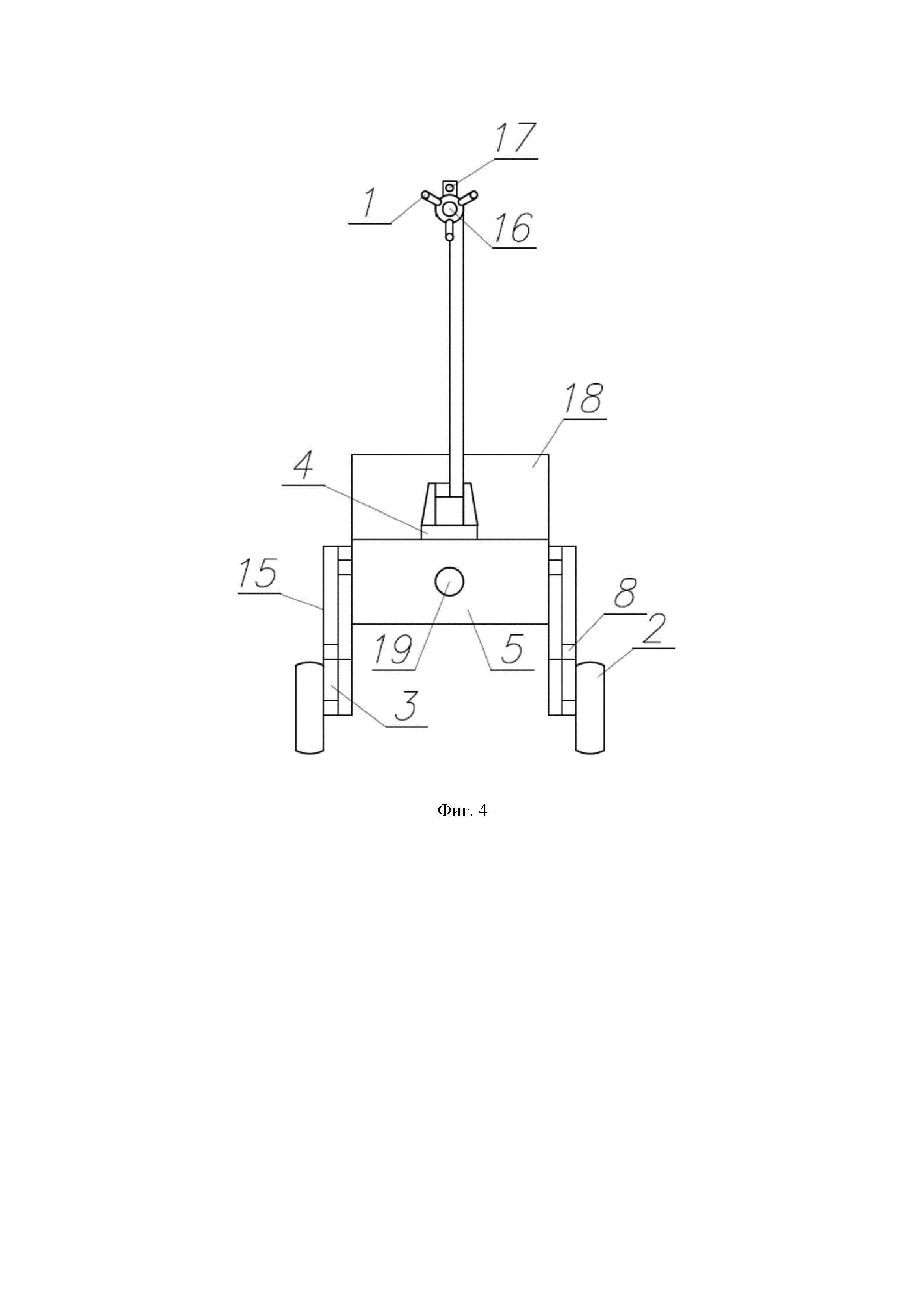
на фиг. 4 - вид на заявляемое устройство спереди,
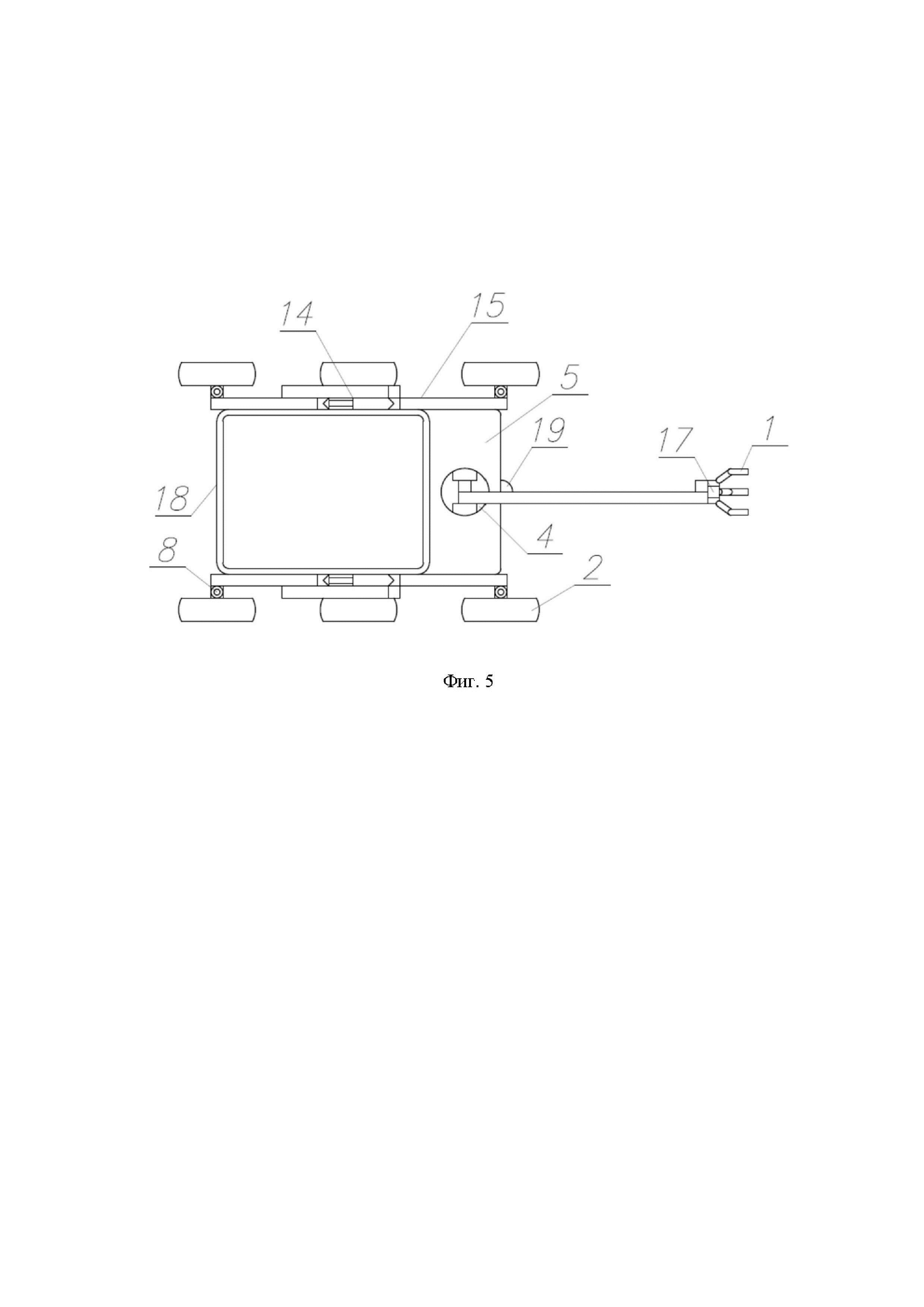
на фиг. 5 - вид на заявляемое устройство сверху.
Позициями на фигурах обозначены:
1 - манипулятор для захвата томатов;
2 - мотор-колесо;
3 - поворотная стойка;
4 - поворотный столик;
5 - рама;
6 - бортовой компьютер;
7 - управляющее устройство;
8 - поворотный элемент;
9 - крепление бортового компьютера;
10 - джойстик;
11 - навигационное устройство на базе GPS;
12 - четырехтактный бензиновый генератор;
13 - гиродатчик;
14 - линейный актуатор;
15 - подвеска;
16 - вакуумная помпа;
17 - HD-камера для распознавания томатов;
18 - контейнер для сбора плодов;
19 - HD-камера для анализа местности.
Осуществление изобретения
Устройство для обеспечения мобильности выполнено в виде платформы, смонтированной с возможностью перемещения. Платформа включает раму, на которой закреплен поворотный столик 4, предназначенный для размещения манипулятора 1. Рама 5, выполненная из прочного алюминиевого сплава, несет на себе нагрузку компонентов устройства и контейнера с собираемыми томатами. По боковым сторонам рамы на подвеске закреплены мотор-колеса, обеспечивающие перемещение заявляемого устройства. Мотор-колеса 2 устройства (в опытном образце использовано шесть штук, по три с каждой стороны устройства) соединены с поворотными стойками 3. Угол поворота мотор-колес регулируется системами управления поворотного элемента 8. Благодаря всенаправленному ходу мотор-колес, заявляемое устройство может изменять курс своего движения, не меняя положения своего корпуса, вместо этого регулируя только угол поворота мотор-колес.
В основании манипулятора установлена вакуумная помпа, которая контролирует захват. Вакуумная помпа представляет собой сферу диаметром около 10 см из вакуум-плотной промышленной резины, заполненную мелкими гранулами пластика. Вакуумная помпа схватывает томаты посредством эффекта фазового перехода состояния пластиковых гранул при изменении внешнего давления. Мелкие гранулы пластика, находясь в свободном состоянии, представляются собой массу, напоминающую по физическим свойствам жидкость, характеризуясь податливостью, плавучестью и текучестью. Применяя к вакуумной помпе определенную силу, например, при ее прижатии к плоду, мелкие гранулы пластика становятся твердыми и прочными. Эластичность резины, в сочетании с податливостью мелких гранул пластика, дает возможность вакуумной помпе, находящейся в ненапряженном состоянии, трансформироваться в форму, соответствующую форме захватываемого томата. Затем в вакуумной помпе формируется разрежение до достижения вакуума, который приводит к уплотнению мелких гранул пластика и одновременному крепкому фиксированию захватываемого томата.
Манипулятор снабжен HD-камерой 17, размещенной на его наконечнике. HD-камера 17 обеспечивает функцию распознавания плодов и степени их созревания. Работа манипулятора, параметры его наклона, поворотов, захвата плодов регулируются управляющим устройством 7 манипулятора. Ультразвуковой дальномер (не показан), установленный на наконечнике манипулятора, помогает пальцам манипулятора и вакуумной помпе точнее приближаться к спелому томату. Управляющее устройство 7 манипулятора помещено внутри корпуса. Бортовой компьютер 6 обеспечивает управление всеми рабочими блоками заявляемого устройства. Бортовой компьютер 6 размещен на креплении 9, внутри корпуса. Бортовой компьютер 6 имеет графический процессор со сверхточной нейронной сетью, необходимой для анализа фотографий растений. Помимо автономного режима, устройство может также управляться оператором, например, через джойстик 10, в частности, когда автономный режим невозможен из-за непредвиденных ситуаций при эксплуатации устройства. Устройство ориентируется в пространстве с помощью модуля GPS 11, расположенного внутри корпуса. Гиродатчик 13, находящийся внутри корпуса, контролирует положение заявляемого устройства на земле. Высота корпуса над поверхностью грунта регулируется с помощью двух линейных актуаторов 14 подвески 15. Два линейных актуатора 14 установлены по одному на нижней части корпуса по бокам, соединяясь с подвеской 15. Подвеска 15 выполнена по принципу качающейся тележки или, иначе, «рокер-тележки» (https://en.wikipedia.org/wiki/Rocker-bogie). Наличие рычагов подвески позволяет заявляемому устройству преодолевать бугры, холмы и неровности рельефа без риска опрокидывания и/или пробуксовывания, позволяя сохранять положение корпуса в горизонтальном положении, что важно для точности получаемых HD-камерой фотографий томатов. Устройство оснащено также Wi-Fi модулем для обеспечения возможности беспроводного соединения с джойстиком оператора. В качестве источника питания устройство снабжено, по меньшей мере, одним литий-ионным аккумулятором, обеспечивающим возможность питания устройства. Аккумулятор размещен внутри корпуса. К аккумулятору может быть подсоединен четырехтактный бензиновый генератор 12, предназначенный для подзарядки аккумулятора в случае израсходования заряда. Благодаря бензиновому генератору 12, аккумулятор получит заряд, необходимый для того, чтобы устройство могло доехать с поля на базу для полноценной подзарядки. Пальцы манипулятора, выполненные из алюминиевого сплава, имеют 6 степеней свободы с грузоподъемностью до 500 г, при этом манипулятор достигает 1,5-2 м в длину. Помимо пальцев, манипулятор снабжен вакуумной помпой 16, которая цепляет томат и удерживает его до момента отправления в контейнер для сбора урожая. Принцип захвата предметов вакуумной помпой описан по ссылке: https://dailytechinfo.org/robots/5549-kofeynyy-zahvat-versaball-pozvolit-robotam-manipulirovat-obektami-imeyuschimi-formu-lyuboy-slozhnosti.html. Над корпусом установлен контейнер для хранения собранных томатов. Снизу и по боковым стенкам изнутри контейнер обложен хладагентом (например, сухим льдом или охлаждающими пакетами), благодаря которому томаты сохраняют свой товарный вид и не портятся в жаркую погоду. На передней части корпуса может быть установлен датчик освещенности (не показан), подающий на блок управления сигнал о наступлении темноты. В свою очередь, блок управления адресует команду на включение LED-габаритов, которые начинают светиться, делая устройство видимым на густо заросшем поле. LED-габариты прикреплены к ребрам (краям) на передней и задней сторонах корпуса. Поскольку верхняя панель LED-матрицы выполнена из оргстекла из специальной транслюцентной пленки, то свет плавно растекается, создавая эстетичные переливчатые цвета.
Отслеживание захвата томатов осуществляется с помощью дополнительной камеры, установленной в манипуляторе справа от вакуумной помпы. Ультразвуковой дальномер, установленный на наконечнике манипулятора, оценивая расстояние от него до томата, помогает пальцам манипулятора и вакуумной помпе точнее приближаться к спелому томату.
Устройство отличается применением интеллектуальных обучающихся алгоритмов для распознавания плодов, точного определения их координат, размеров, степени зрелости в зависимости от вводимых данных по сортам томатов.
Устройство может быть дополнительно оснащено следующим оборудованием: прожектором, дозиметром, газовым анализатором, датчиками температуры, влажности. Программная часть блока управления заявляемого устройства адаптируется под требования пользователя.
Заявляемое устройство работает следующим образом.
При сборе плодов происходит захват томата в специальную вакуумную помпу и в три пальца манипулятора с последующим отрывом от плодоножки с усилием 25 Н. Производительность устройства составляет около 220 кг/час, при этом необходимость последующей дополнительной переборки собранного урожая отсутствует, степень повреждения томатов незначительна.
Предварительно бортовой компьютер 6 определяет местоположение устройства с помощью навигационного устройства GPS, инерционной системы и лидара, размещенных на передней части корпуса, справа от поворотного столика 4. Начальная координата определяется с помощью базовой станции, затем инерционная система регистрирует изменение координаты в пространстве во время движения. Лидар повышает точность позиционирования устройства на поле посредством анализа полученных данных и сопоставлением их с существующей картой-заданием. Бортовой компьютер 6 обрабатывает информацию, поступающую с навигационного устройства GPS, инерционной системы и лидара. Затем компьютер 6 определяет местоположение робота.
В начале процесса сбора томатов устройство размещают на поле и активируют источник питания. Устройство заезжает на томатное поле, ведя навигацию с помощью системы GPS. Устройство перемещается на шести колесах по пути, заданному навигационным устройством GPS. HD-камера, будучи направленной в сторону одного междурядья, ведет поиск плодов томатов, передавая изображения в бортовой компьютер. HD-камера выполняет поиск спелых томатов. Камера фотографирует плоды и передает файл с изображением в бортовой компьютер. Нейронная сеть обрабатывает полученные изображения растений и плодов, при этом алгоритм на базе архитектуры YOLOv4 детектирует и классифицирует изображения томатов. YOLOv4 использует систему «скользящего окна». Архитектура YOLOv4, разбивая фотографии на условные квадратные блоки, предсказывает вероятность нахождения томатов для каждого блока по заданным признакам. Это экономит время обработки фотографий, что делает сверточную нейронную сеть предпочтительной для работы [Bosilj P., Aptoula E., Duckett T., Cielniak G. Transfer learning between crop types for semantic segmentation of crops versus weeds in precision agriculture // Journal of Field Robotics. - 2020. - Vol.37(1). - Pp.7-19. DOI: 10.1002/rob.21869]. Таким образом, классификатор сверточной нейронной сети на базе архитектуры YOLOv4 определяет спелость томата. Если обнаружен неспелый плод, то устройство продолжает свое движение дальше. При обнаружении в результате анализа нейронной сетью спелого плода, бортовой компьютер направляет соответствующий сигнал на блок управления.
Более конкретно, при обнаружении томата на фотоснимке инициируются следующие этапы обработки изображения томата на фотоснимке:
- гамма-преобразование (усиление насыщенности цвета томата);
- медианная фильтрация (используемая для удаления шума из изображения томата);
- преобразование в HSV (цветовую модель, в которой координаты цвета - это цветовой тон, насыщенность и яркость);
- сегментация по алгоритму Отцу (используя гистограмму распределения значений яркости пикселей растрового изображения томата с кластеризацией);
- морфологическая обработка (изменение пикселей на изображении томата с целью повышения его четкости);
- поиск контура (выделение границ томата);
- получение информации о местонахождении томата для передачи ее манипулятору, чтобы он захватил томат, оторвал от плодоножки и переместил в контейнер для сбора урожая.
Блок управления направляет сигнал на мотор-колеса, чтобы устройство подъехало ближе к растению с обнаруженным спелым томатом и остановилось. После остановки блок управления подает команду на запуск манипулятора, который начинает двигаться в сторону найденного спелого томата. Как только манипулятор достигает томата, вакуумная помпа присасывает томат, а пальцы манипулятора обхватывают плод: в итоге он схватывается двойным усилием - пальцами и вакуумной помпой. Далее манипулятор начинает движение назад и вниз, по направлению к корпусу, и тянет за собой томат.Манипулятор перемещается в заданную позицию, над контейнером. Под силой натяжения плодоножка томата разрывается, и томат отделяется от нее, и пальцы манипулятора опускают плод, и он попадает в контейнер для сбора. Система охлаждения предотвращает порчу томата, благодаря чему устройство может не возвращаться на овощехранилище до тех пор, пока контейнер полностью не наполнится томатами. В контейнер опытного образца устройства помещается около 20 кг томатов. Как только одна сторона междурядья на поле будет пройдена устройством, крепление HD-камеры поворачивается на другую сторону междурядья, и HD-камера начинает поиск созревших томатов по другой стороне. Датчик освещенности при наступлении темноты подает сигнал на блок управления с тем, чтобы он дал команду на включение LED-габаритов. LED-габариты в активированном состоянии делают устройство заметным издалека, предупреждая наезд на него других фермеров и давая понять, в каком месте поля устройство находится. В ходе движения подвеска адаптируется к рельефу местности так, что корпус постоянно сохраняет свое горизонтальное положение, благодаря чему HD-камера не изменяет угол своего наклона. Тем самым достигается высокое качество фотоснимков, без «размытия». В результате, нейронной сети легче распознавать степень зрелости томатов, ориентируясь на высококачественные фотографии. Классификатор нейронной сети устройства отделяет созревшие томаты от незрелых. За счет этого возможно избежать преждевременного срыва недоспевших плодов. Процент обнаруженных томатов опытным образцом устройства составляет - 92%, незамеченных - 8%. Среднее время сбора томатов с одного куста - 380 секунд. Система навигации на базе GPS позволяет предлагаемому устройству ориентироваться в ходе движения по полю, саду или теплице. Всенаправленный ход шести мотор-колес позволяет предлагаемому устройству экономить пространство для разворота, повышая тем самым его маневренность и проходимость.
Заявляемое устройство может двигаться автономно или управляться дистанционно с помощью джойстика. В таком случае оператор имеет возможность принимать фотографии плодов в режиме реального времени. Они передаются через Wi-Fi маршрутизатор на бортовой компьютер 6. Вес опытного образца устройства составляет - 400 кг с размерами платформы 1 250 - 1 550 - 1 750 мм (высота - ширина - длина). Вес манипулятора составляет около 7 300 г, а его длина - около 1,5 метров в разложенном виде.
Способ получения поли[(r)карбинов] (r=h, алкил, арил) и катализатор для их получения
Способ микроинкапсулирования стволовых клеток
Способ получения и использования тканеинженерных конструкций на основе прогениторных клеток для лечения заболеваний сердца
Способ получения ростовой добавки на основе лизата тромбоцитов из тромбоцитарной массы доноров к среде для наращивания клеточной массы стволовых, прогениторных, дифференцированных и опухолевых клеток
Способ модификации углеродных нанотрубок для получения гидрофильных или гидрофобных поверхностей
Устройство на основе ударной трубы для синхронного измерения параметров плазмы
Способ получения микропористого трехфазного композита
Способ получения микропористого трехфазного композита
Резервуарное вычислительное устройство на основе металлорганического каркасного полимера и способ его изготовления
Способ и система для прецизионной аддитивной печати трехмерных структур (варианты)

