Результат интеллектуальной деятельности: СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ СИСТЕМОЙ ДОПЛЕРОВСКИХ ПРИЕМНИКОВ
Вид РИД
Изобретение
Изобретение относится к системам контроля воздушного пространства при обнаружении движущихся объектов с помощью полуактивной многопозиционной системы доплеровских приемников с антенными решетками (АР), принимающих и обрабатывающих радиотехнические сигналы.
Многопозиционные системы по сравнению с однопозиционными позволяют улучшить характеристики обнаружения объектов и надежность работы системы в целом. Известны способы повышения точности и надежности многопозиционной пассивной системы [1, 2], основанные на расположении приемников по линии окружности с взаимным ортогональным направлением линий визирования стереопар приемников. Способы применимы как для пассивной, так и полуактивной радиосистем. Рассмотрим в качестве прототипа способ [2], который сводится к следующему.
1. Располагают n пар (n≥2) взаимно ориентированных приемников так, чтобы линии визирования приемников в каждой паре были близки к ортогональным.
2. Определяют угловые координаты направлений на объекты в каждом приемнике и на их основе составляют орты векторов направлений.
3. Выбирают в каждой паре приемников неповторяющиеся варианты соединения ортов в сопряженные пары по критерию сопряжения и для выбранных вариантов вычисляют оценки дальностей и пространственных координат объектов.
4. Из всех n пар приемников выбирают одну пару с наилучшим показателем сопряжения векторов и полученные в этой паре пространственные координаты объектов передают на сопровождение.
5. Если происходит отказ в работе отдельного приемника в какой-либо паре, то осуществляют перераспределение пар.
Дополнительно в описании способа [2] поясняется, что ортогональность линий визирования приемников достигается расположением приемников на линии окружности или поверхности сферы с определенным радиусом, зависящим от рубежа дальности наблюдения. Центр единой системы координат совпадает с центром окружности или сферы. Система состоит из нескольких оптических, радиометрических или радиотехнических приемников.
Данный способ обладает следующими недостатками.
1. Из расположения приемников на линии окружности с ортогональностью линий визирования следует, что диаграммы направленности антенн (ДНА) парных приемников направлены к центру окружности расположения охранной зоны (стадионов, парков, аэродромов и т.п.) Контроль воздушных объектов за внешним периметром окружности способ не предусматривает.
2. Способ не раскрывает операций, позволяющих определять орты векторов направлений на объекты.
3. Выбор сопряженных пар в стереопарах приемников обусловлен отсутствием измерений дальностей до объектов и необходимостью нахождения их оценок, что характерно для пассивных систем. В активных радиосистемах дальность измеряется по временной задержке принятых сигналов и не требуется применение специальных критериев сопряжения векторов.
Предлагаемое техническое решение направлено на устранение указанных недостатков и на применимость в радиосистемах контроля движущихся объектов как внутри, так и вне периметра наблюдения.
Технический результат предлагаемого технического решения достигается применением способа обнаружения движущихся объектов системой доплеровских приемников, который заключается в расположении n пар (n≥2) взаимно ориентированных радиоприемников в общей системе координат с последующим обнаружением объектов и определением их угловых координат, отличающийся тем, что пары синхронно работающих активных и пассивных приемников с антенными решетками располагают на прямой с расстояниями d1>d2>…>dn симметрично относительно центра прямой, а линии визирования антенн направляют ортогонально к поверхностям полусфер возможного проникновения объектов на рубежах дальностей Rk=dk/2, k=1,2,…,n - радиусов полусфер, при этом активные париемники в k-х парах попеременно во времени передают зондирующие сигналы, а соответствующие пассивные приемники принимают по времении отраженные сигналы, после чего принятые в парах приемников сигналы преобразуют в спектры частот, выбирают тот приемник в паре, у которого число обнаруженных доплеровских частот в спектре больше, а ширина спектральных составляющих уже, затем на этих частотах определяют фазы спектральных составляющих и фазовым методом находят угловые координаты обнаруженных объектов на рубежах дальности R1, R2, …, Rn и передают их на сопровождение.
Алгоритмически способ сводится к следующим операциям.
1. Располагают пары синхронно работающих активных и пассивных приемников с антенными решетками на прямой АВ с расстояниями d1>d2>…>dn симметрично относительно центра АВ, а линии визирования антенн направлют ортогонально к поверхностям полусфер возможного проникновения объектов на рубежах дальностей Rk=dk/2,  - радиусов полусфер. Центр охраняемой зоны соответствует центру полусфер.
- радиусов полусфер. Центр охраняемой зоны соответствует центру полусфер.
2. Активные приемники в k-х парах  попеременно во времени (для исключения взаимных помех) передают зондирующие сигнралы, а соответствующие пассивные приемники принимают по времении отраженные сигналы.
попеременно во времени (для исключения взаимных помех) передают зондирующие сигнралы, а соответствующие пассивные приемники принимают по времении отраженные сигналы.
3. Принятые в парах приемников периодические сигналы в цифровой форме преобразуют в спектры частот и находят в спектрах доплеровские частоты, на которых амплитуды спектральных составляющих превышают порог обнаружения полезного сигнала во всех приемных каналах.
4. Выбирают тот приемник в паре, у которого число обнаруженных доплеровских частот больше, а спектральные составляющие уже. На этих частотах определяют фазы спектральных составляющих и фазовым методом находят угловые координаты объектов.
5. Дальности до объектов в приемнике А определяют по временной задержке сигналов, а в приемнике В - по точкам пересечения сферической поверхности уровня дальности приемника А и прямых с направляющими векторами на объекты со стороны приемника В.
6. Угловые координаты и дальности обнаруженных объектов переводят в общую прямоугольную систему координат и передают на сопровождение.
7. Если выходит из строя передатчик в отдельной паре, то остальные продолжают работать. Предусматривается возможность сканирования линий визирования антенн для расширений зоны контроля, а также парная работа приемопередающих станций (активных приемников).
Надежность и вероятность обнаружения
Надежность системы независимой работы n пар приемников при вероятности безотказной работы каждой пары р, определяется вероятностью Pn того, что из n пар приемников будет работать хотя бы одна пара:

что в сравнении с одной парой (n=1) дает преимущество: pn>р при n>1.
Если принять за р вероятность обнаружения всех объектов отдельной парой приемников на заданных рубежах дальности, то вероятность обнаружения всех объектов системой из n приемников также определяется формулой (1). То есть системная работа пар приемников имеет преимущество по вероятности обнаружения объектов по сравнению с одной парой.
Причем пара доплеровских приемников (активного и пассивного) имеет преимущество по сравнению с одним активным доплеровским приемником по вероятности обнаружения всех объектов. Покажем это на примере двух объектов, движущихся с одинаковой абсолютной скоростью v.
Пусть вектор скорости первого объекта  направлен по линии визирования антенны первого активного приемника А, а вектор скорости второго объекта
направлен по линии визирования антенны первого активного приемника А, а вектор скорости второго объекта  составляет с вектором первого угол Δα, тогда доплеровские частоты для 1-го и 2-го объектов в приемнике А составляют
составляет с вектором первого угол Δα, тогда доплеровские частоты для 1-го и 2-го объектов в приемнике А составляют

где λ - длина волны,
соответственно абсолютная разность доплеровских частот в приемнике А

Пусть линия визирования второго пассивного приемника В составляет с линией визирования первого угол α. Доплеровские частоты от первого и второго объектов в приемнике В определятся как

соответственно абсолютная разность доплеровских частот в приемнике В

На фигуре показана зависимость отношения разностей доплеровских частот ΔƒB/ΔƒА от угла α для случаев Δα=3° (верхняя дуга), Δα=5° (средняя дуга) и Δα=10° (нижняя дуга).
Фигура
Из фигуры видно во сколько раз система двух приемников (активного и пассивного) имеет преимущество в количественном выигрыше по сравнению с одним активным приемником. Наибольшая абсолютная разность доплеровских частот наблюдается в окрестности α=90° - при ортогональном положении линий визирования приемников, пересекающихся на полусферах рубежей дальностей R1, R2, …, Rn. Соответственно повышается вероятность обнаружения объектов с близкими радиальными проекциями скоростей.
Парная работа приемопередающих станций
В системе, составленной из пар активных приемников, работающих с попеременным излучением сигналов, абсолютная разность доплеровских частот в рассмотренном примере для первого приемника по-прежнему составляет

а в приемнике В будет

При этом соотношение ΔƒB/ΔƒA в два раза превышает соотношение, показанное на фигуре. Соответственно имеется преимущество по вероятности обнаружения всех объектов в активном режиме по сравнению с полуактивным. Вместе с тем активный режим требует повышенных энергозатрат на излучение и обладает меньшей скрытностью.
Результаты моделирования полуактивной пары
При моделировании два объекта двигались в сторону первого приемника по линейному закону. Скорость первого объекта выбиралась случайным образом на промежутке от 10 до 15 м/с, вектор скорости второго объекта, равный по модулю скорости первого, составлял с вектором скорости первого угол Δα, выбираемый случайно от 1° до 5° Объекты наблюдались в элементе разрешения дальности R=100 м в пределах ширины круговых ДНА ±30° (на уровне 0,5 мощности). Приемники располагались на прямой на расстоянии d друг от друга.
Передатчик излучал квазинепрерывный гармонический сигнал с длиной волны λ=0,03 м. Принимаемый в приемнике сигнал моделировался на промежуточной частоте fп=103 с шагом дискретизации Δt=1/(8fп) и параметрах пятиэлементной АР с координатами центров несимметрично расположенных приемных элементов (для устранения неоднозначности измерения разности фаз): (0, 0), (а, 0), (0, а), (-b, 0), (0, - b), а=3λ, b=0,5 λ.
Количество повторений опыта на множестве реализаций случайного шума  при отношении сигнал-шум 30 дБ и мультипликативго шума с СКО σγ=10-3 составляло 5000 реализаций. Объект считался обнаруженным, если величина ρ не превышала 1 м.
при отношении сигнал-шум 30 дБ и мультипликативго шума с СКО σγ=10-3 составляло 5000 реализаций. Объект считался обнаруженным, если величина ρ не превышала 1 м.
Шум измерения фазы в каждом канале АР  , где СКО
, где СКО  рассчитывалось в соответствии с [3] как
рассчитывалось в соответствии с [3] как  , где k - коэффициент, который при оптимальной обработке сигнала равен 1; q=Рс/Рш=Е/N0 - отношение мощностей сигнала и шума на входе измерителя, что при q=30 дБ:
, где k - коэффициент, который при оптимальной обработке сигнала равен 1; q=Рс/Рш=Е/N0 - отношение мощностей сигнала и шума на входе измерителя, что при q=30 дБ:  .
.
В таблице показаны оценки среднего значения М[ρ], среднеквадратического отклонения (СКО) σ[ρ] случайной величины ρ, имеющей смысл расстояния между моделируемым и найденным положением объекта в метрах и распределенной по закону Максвелла, а также оценки вероятности обнаружения всех (двух) объектов D для разных рассояний d между приемниками. Оценки получены для двух и одного активного приемника.

Заключение
Предложенный способ позволяет повысить вероятность обнаружения объектов с близкими проекциями векторов скоростей за счет правильного расположения пар приемников в полуактивной системе пеленгации, а также повысить надежность системы в целом по сравнению с одной парой. Работа в полуактивном режиме обладает преимуществом скрытности и соответственно повышенной надежностью по сравнению с активным режимом. Способ применим в существующих системах пеленгации воздушных объектов.
Литература
1. Патент RU 2682376. Способ повышения надежности и точности пассивной системы видения / В.К. Клочко. Приоритет 02.04.2018. Опубл. 19.03.19. Бюл. №8.
2. Патент RU 2729511. Способ повышения надежности и точности пассивной системы видения / В.К. Клочко. Приоритет 11.02.2020. Опубл. 07.08.2020. Бюл. №22.
3. Бакулев П.А. Радиолокационные системы: учебник для вузов. М: Радиотехника, 2007. 376 с.
Способ обнаружения движущихся объектов системой доплеровских приемников, заключающийся в расположении n пар, причем n≥2, взаимно ориентированных радиоприемников в общей системе координат с последующим обнаружением объектов и определением их угловых координат, отличающийся тем, что пары синхронно работающих активных и пассивных приемников с антенными решетками располагают на прямой с расстояниями d>d>…>d симметрично относительно центра прямой, а линии визирования антенн направляют ортогонально к поверхностям полусфер возможного проникновения объектов на рубежах дальностей R=d/2, k=1, 2, …, n - радиусов полусфер, при этом активные приемники в k-х парах попеременно во времени передают зондирующие сигналы, а соответствующие пассивные приемники принимают по времени отраженные сигналы, после чего принятые в парах приемников сигналы преобразуют в спектры частот, выбирают тот приемник в паре, у которого число обнаруженных доплеровских частот в спектре больше, а ширина спектральных составляющих уже, затем на этих частотах определяют фазы спектральных составляющих и фазовым методом находят угловые координаты обнаруженных объектов на рубежах дальности R, R, …, R, и передают их на сопровождение.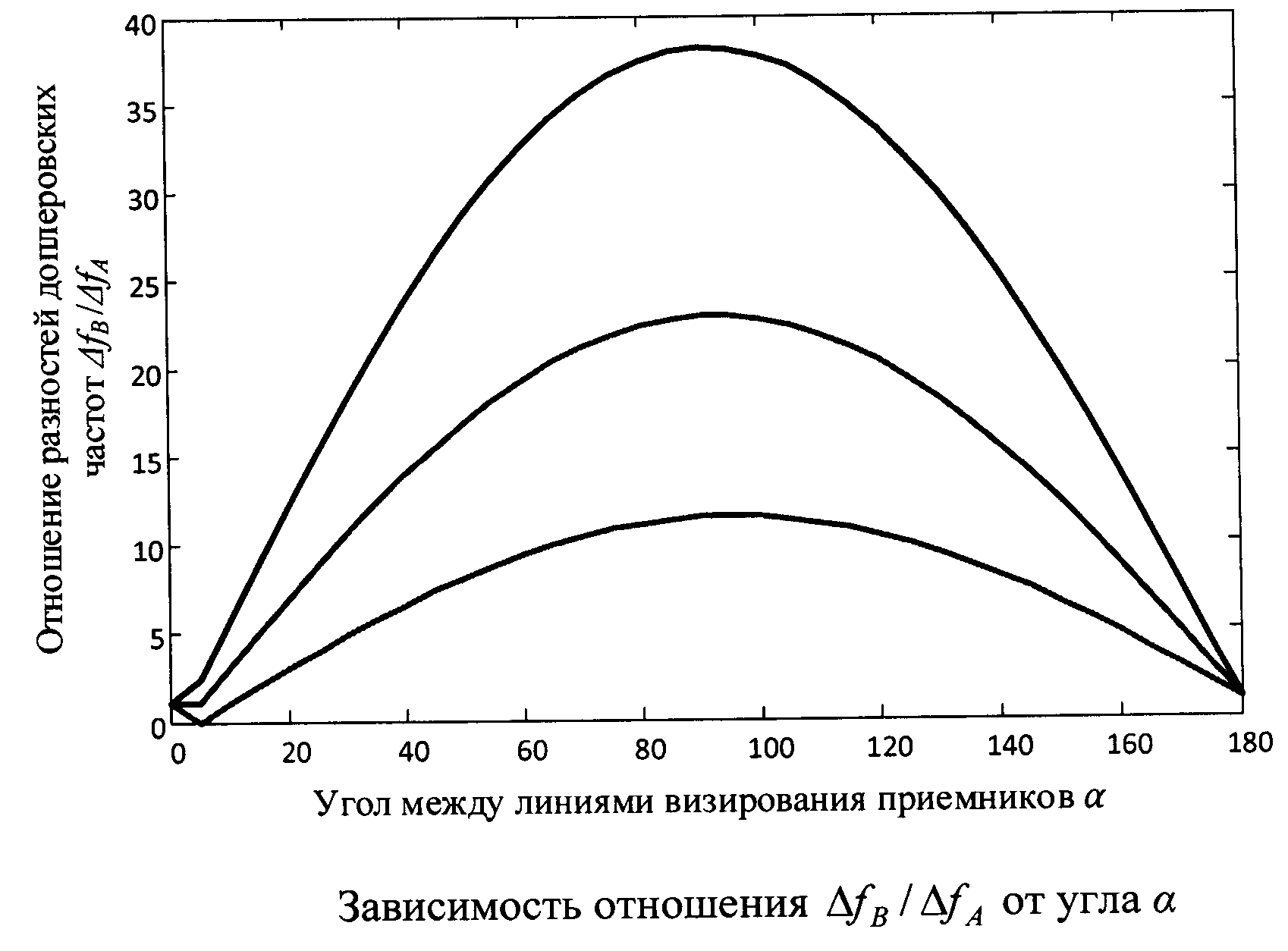
Бинарный космический аппарат для поиска и сбора внеземных нанообъектов в окрестностях точек либрации планет, входящих в солнечную систему
Бинарный космический аппарат для поиска и сбора внеземных нанообъектов с магнитными свойствами в окрестностях точек либрации
Фильтр режектирования помех
Фильтр подавления помех
Фильтр для подавления помех
Фильтр режекции помех
Бинарный космический аппарат для поиска и сбора внеземных объектов со свойствами квантовых точек в окрестностях точек либрации
Способ наблюдения за движущимися объектами многопозиционной системой приемников
Способ наблюдения за движущимися объектами многопозиционной системой приемников

