Результат интеллектуальной деятельности: СПОСОБ ИЗМЕРЕНИЯ СИЛЫ ЦЕЛИ НА МАСШТАБНОЙ МОДЕЛИ
Вид РИД
Изобретение
Настоящее изобретение относится к области гидроакустики, а именно гидроакустических измерений и может быть использовано для измерения величины силы цели (СЦ) подводных объектов (ПО) на их масштабных моделях.
Величина гидролокационного отражения от подводного объекта оценивается силой цели, определяемой как отношение амплитуды сигнала, отраженного от подводного объекта к амплитуде сигнала, отраженного от эталона. Также в отечественной технической литературе часто используется величина эквивалентного радиуса Rэкв, определяемая величиной отношения амплитуды сигнала, отраженного от подводных объектов - Ам, к величине амплитуды сигнала, отраженного от сферы радиусом 
Известен способ измерения величины силы цели масштабной модели подводного объекта, описанный в монографии (В.П. Пересада «Радиолокационная видимость морских объектов» Государственное союзное издательство судостроительной промышленности, Ленинград, 1961, стр. 98). В данном способе измерение силы цели подводных объектов выполняется путем сравнения амплитуд сигналов, отраженных от масштабной модели подводного объекта - Ам и эталона - Аэт. В качестве эталона чаще всего выбирается металлическая сфера. Измерение амплитуды отраженного сигнала от эталона выполняется на этапе калибровки аппаратуры перед началом и после окончания каждой серии опытов.
Недостатком известного способа является необходимость проведения измерений эталона до и после измерений и, как следствие снижение точности получаемых результатов в связи с изменениями гидрологических условий в процессе измерений.
В качестве ближайшего прототипа принят способ измерения величины силы цели подводного объекта, описанный в книге (Г.В. Абрамов «Основы гидроакустического моделирования». Издательство Саратовского университета, 1976, стр. 13). Согласно этому способу, для определения силы цели масштабной модели подводного объекта перед началом и по окончании каждой серии измерений выполняется калибровка приемоизлучающего тракта с помощью амплитуды сигнала, отраженного от эталона - Аэт. Для этого модель снимается со штанги, и на его место устанавливается эталонный отражатель. Выполняются измерения амплитуды сигнала Аэт, отраженного от эталона. С помощью сравнения полученных в результате измерений амплитуд сигналов, отраженных от модели подводного объекта - Ам и эталона - Аэт, рассчитывается величина силы цели.
В известном способе измерения эталонного сигнала выполняются с длительным интервалом времени между началом и окончанием серии опытов, включающих измерения амплитуд отраженных сигналов от подводного объекта при различных длительностях зондирующих сигналов, различного вида зондирующих сигналов (тональный, сложный), а также при мультистатическом и бистатическом режимах излучения и приема.
Недостатком прототипа является то, что за время между двумя последовательными сериями измерений продолжительностью 5-6 часов амплитуды сигналов, отраженных от эталона, принятые приемником в результате калибровки перед началом и после окончания серии измерений отличаются на 3-4 дБ. Причиной изменения амплитуд эталонных сигналов между двумя смежными сериями измерений являются изменения скорости звука по глубине в районе выполнения измерений и как следствие изменение амплитуд сигналов, отраженных от измеряемого подводного объекта (В.Б. Жуков «Современные технологии в области гидроакустических антенн». Сборник «Актуальные проблемы пьезоэлектрического приборостроения и нанотехнологий» - труды НКТБ «Пьезоприбор» Ростовский государственный университет, 2016). Такое существенное изменение амплитуд сигналов при измерениях величины силы цели подводного объекта на его масштабной модели существенно снижает точность результатов измерений.
Техническим результатом изобретения является повышение точности результатов измерений величины силы цели подводного объекта.
Технический результат достигается за счет того, что в способе определения силы цели подводных объектов на их масштабных моделях, состоящий в облучении эталона и масштабной модели зондирующим сигналом, приеме отраженных амплитуд сигналов от эталона и масштабной модели и определения силы цели, имеет следующие отличия: калибровка приемно-излучающего тракта проводится в два этапа, а именно на первом этапе определяется амплитуда сигнала Аэт отраженного от эталона; на втором этапе, измеряется амплитуда сигнала Апр дополнительным приемником установленным над масштабной моделью на расстоянии равному вертикальному размеру масштабной модели; затем, с помощью регулировки усиления приемного тракта добиваются равенства амплитуд сигнала измеренного дополнительным приемником Апр и отраженного от эталона Аэт, далее в процессе измерения определяется величина разности измеренных амплитуд сигналов ΔАэт дополнительного приемника и эталона, полученных при калибровке по формуле:
далее определяется текущее значение амплитуды сигнала, отраженного от эталона по формуле:
далее определяется эквивалентный радиус по формуле:  далее определяется величина силы цели по формуле:
далее определяется величина силы цели по формуле:
где:
ΔΑэт - величина разности измеренных амплитуд сигналов дополнительного приемника и отраженных от эталона;
Аэт - амплитуда сигнала, отраженного от эталона;
Апр - амплитуда сигнала, измеренная дополнительным приемником;
Rэкв - эквивалентный радиус;
Ам - амплитуда сигнала, отраженного от масштабной модели подводного объекта;
Аэ - текущее значение амплитуды сигнала, отраженного от эталона;
СЦ - сила цели.
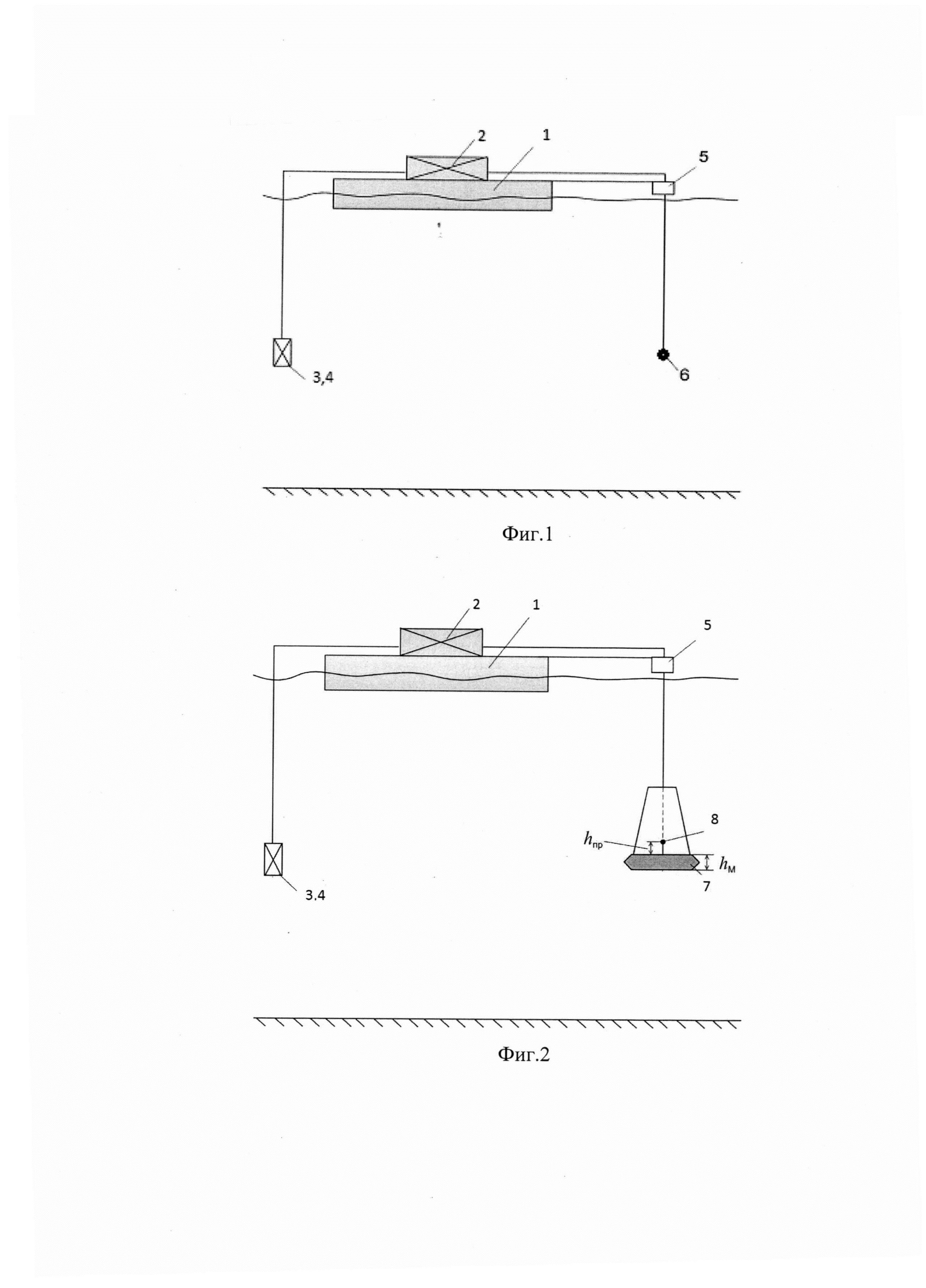
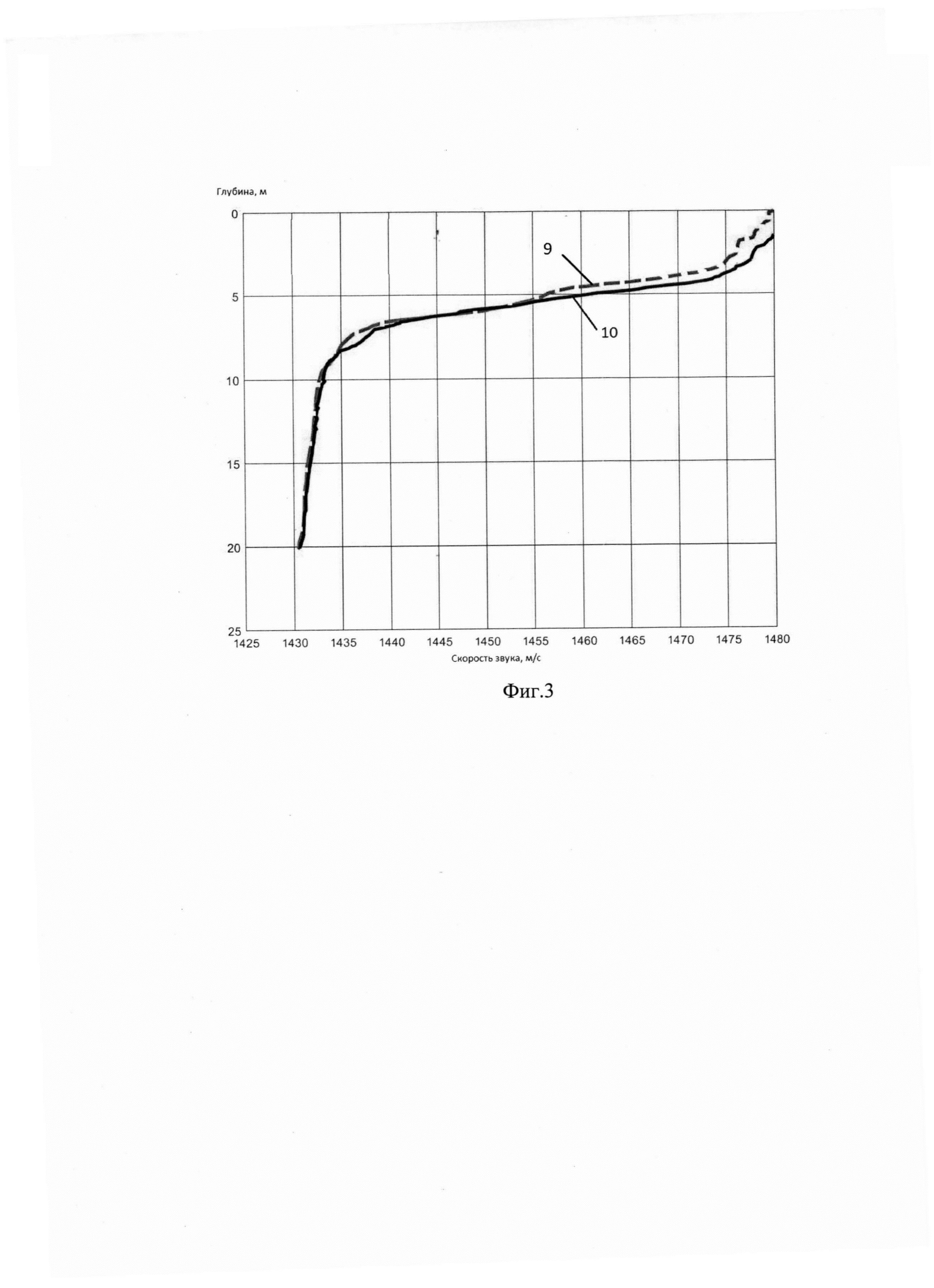
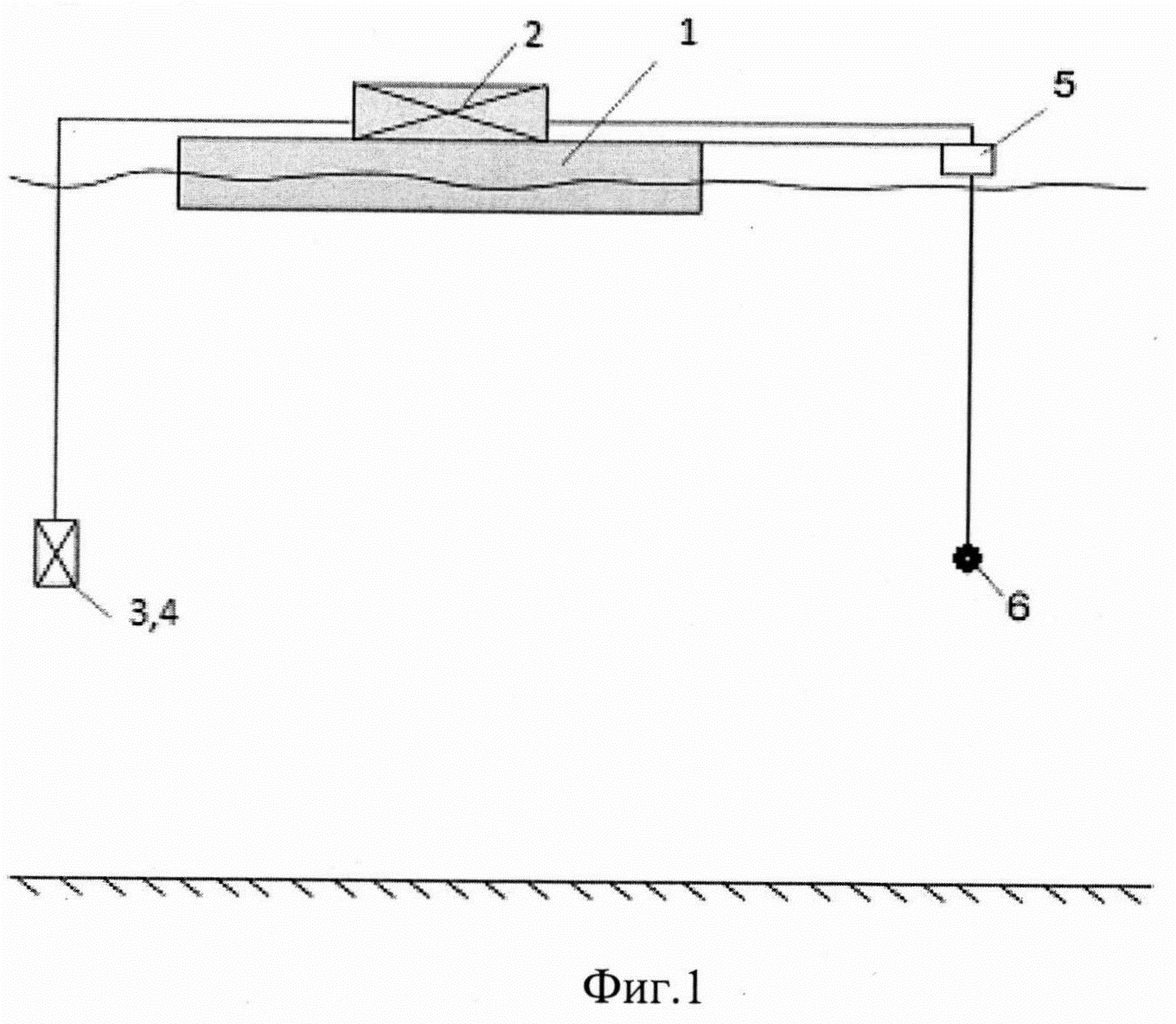
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена схема измерения амплитуды сигнала, отраженного от эталона; на фиг. 2 представлена схема измерения силы цели масштабной модели; на фиг. 3 представлен график изменения скорости звука по глубине с временным интервалом 6 часов между последовательными измерениями,
где:
1 - плавлаборатория;
2 - электронный блок;
3 - приемник акустического сигнала;
4 - излучатель акустического сигнала;
5 - подъемно - поворотное устройство;
6 - эталон;
7 - масштабная модель подводного объекта;
8 - дополнительный приемник, установленный над моделью;
9 - временной интервал утро;
10 - временной интервал вечер.
Устройство для определения величины силы цели включает в себя плавлабораторию 1, содержащую электронный блок 2, соединенный с приемником 3 и излучателем 4 (фиг. 1), приемник 3 и излучатель 4, установленные на заданную глубину, а также подъемно-поворотное устройство 5 для установки эталона 6 и масштабной модели 7 с установленным над ней дополнительным приемником 8 и соединенным с электронным блоком 2. (см. фиг. 2). Приемник 3, излучатель 4, эталон 6, и масштабная модель 7 устанавливаются на одинаковую глубину.
Первоначально в предложенном способе определения величины силы цели масштабной модели подводного объекта проводится калибровка приемно-излучающего тракта (на чертеже не показан) электронного блока 2 в два этапа:
На первом этапе с помощью подъемно-поворотного устройства 5 устанавливается эталон 6. Приемником акустического сигнала 3 измеряется амплитуда сигнала, излученного излучателем 4 и отраженного от эталона 6 - Аэт. Полученная амплитуда сигнала Аэт отраженного от эталона 6 подается на вход электронного блока 2, установленного на плавлаборатории 1.
После этого эталон 6 с помощью подъемно-поворотного устройства 5 убирается.
На втором этапе с помощью подъемно-поворотного устройства 5 устанавливается на ту же глубину, что и эталон 6, масштабная модель 7, над которой на расстоянии hпр, равному вертикальному размеру модели 4 hм установлен дополнительный приемник 8. Далее, дополнительным приемником 8 измеряется амплитуда сигнала Апр, излученного излучателем 4.
Измеренная амплитуда сигнала Апр с приемника 8 подается на вход электронного блока 2, установленного на плавлаборатории 1, и сравнивается с амплитудой сигнала, отраженного от эталона 6 Аэт.
С помощью регулировки усиления приемного тракта (на фиг. не показано) электронного блока 2 добиваются равенства амплитуд сигнала, принимаемого дополнительным приемником 8 и сигнала, отраженного от эталона 6 и принятого приемником 3 Аэт=Апр на первом этапе калибровки.
Далее, в процессе измерений, приемником 3 измеряется амплитуда сигнала Ам, излученного излучателем 4 и отраженного от масштабной модели 7, одновременно, дополнительным приемником 8 измеряется амплитуда сигнала, излученного излучателем 4 - Апр. При изменении амплитуды сигнала Апр определяется разность текущего значения амплитуды сигнала Апр и амплитуды сигнала Аэт.

где:
Аэт - амплитуда сигнала, отраженного от эталона;
Апр - амплитуда сигнала, измеренного дополнительным приемником.
В связи с тем, что дополнительный приемник 8 измеряет амплитуду сигнала Апр, прошедшего дистанцию от излучателя 4 до дополнительного приемника 8, а приемник 3 измеряет амплитуду сигнала Аэт, прошедшего расстояние от излучателя 4 до эталона 6 и назад, то величина разности ΔАэт увеличивается в 2 раза и формируется текущее значение сигнала эталона.

где:
Аэ - текущее значение амплитуды сигнала, отраженного от эталона;
Данная амплитуда сигнала эталона Аэ используется при определении величины силы цели. При изменении акустико-гидрологических условий измерения, они будут автоматически учитываться величиной Аэ.
Эквивалентный радиус Rэкв определяется по формуле

где:
Ам - амплитуда сигнала, отраженного от масштабной модели подводного объекта;
Аэ - текущее значение амплитуды сигнала, отраженного от эталона;
СЦ - сила цели.
Величина силы цели определяется по формуле

где:
СЦ - сила цели.
При выполнении измерений не требуется знание чувствительностей приемников 3 и 8. Чувствительность приемника 8 калибруется в процессе приравнивания амплитуд сигналов Апр и сигнала, отраженного от эталона Аэт. Выравнивание чувствительности достигается тем, что сигнал, отраженный от эталона 6 и модели 7 принимаются одним приемником 3.
Как видно из фиг. 3, распределение скорости звука по глубине с временным интервалом 8 часов (утро-вечер) существенно изменилась. В результате рефракции (поворота) лучей, амплитуда сигнала, облучающего модель и эталонную сферу, изменяются на величину ΔА. Если измерения амплитуд сигналов от сферы Аэт и модели Ам выполнять одновременно, то изменения амплитуды сигнала облучения не приведет к погрешности определения величины силы цели. В случае выполнения измерений величины Аэт и Ам в разное время будет иметь место погрешность расчета величины силы цели, т.к. измерения величин амплитуд сигнала, отраженного от эталона Аэт и сигнала, отраженного от масштабной модели подводного объекта Ам выполняется в различное время.
Таким образом, за счет того что калибровка приемно-излучающего тракта проводится в два этапа и на втором этапе устанавливается над масштабной моделью дополнительный приемник; а также за счет учета изменения уровня амплитуды, падающего на масштабную модель сигнала на протяжении всего эксперимента, достигается увеличение точности измерения величины силы цели, обусловленной изменением гидрологических условий в процессе измерения.
Малогабаритный высокооборотный судовой генераторный агрегат
Комбинированный двигательно-движительный комплекс судна
Маневренный стенд для измерения и настройки магнитного поля объектов морской техники
Способ оценки погрешностей трехосного гироскопа
Устройство оптимизации алгоритмов адаптации и стабилизации летательного аппарата операторным методом
Устройство турбогенератора трехфазных токов двух различных частот
Способ измерения коэффициента отражения звукопоглощающей конструкции
Микромеханический гироскоп rr-типа
Способ измерения магнитных моментов объекта
Радиопоглощающее покрытие на основе дифракционной решетки
Композиционный полимерный материал для палубных и напольных покрытий
Конструкционная панель
Гидроакустический резонатор
Виброизолирующая опора гребного вала
Звуко-виброизолирующий элемент для покрытий
Звуко-виброизолирующий элемент для покрытий

