Результат интеллектуальной деятельности: УСТОЙЧИВЫЙ РЕБЕРНЫЙ ДАТЧИК С РАСЩЕПЛЕНИЕМ МОДЫ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Варианты осуществления, описываемые ниже, относятся к датчикам, более конкретно, к датчикам расхода.
Уровень техники
Существующие реберные датчики имеют проблемы с формированием разделения мод. Типично, разность частот между модами, которые являются синфазными, и модами, которые не совпадают по фазе, является минимальной, что запутывает вычисления характеристик расхода текучей среды. Также, при формировании завихрения в существующих реберных датчиках, существует небольшой контраст амплитуды, из которого необходимо получать показатели разности фаз, которые дают характеристики расхода.
В существующих реберных датчиках измерения запутываются значительным фактическим перемещением по направлению к узлу датчика от центра трубопроводов, в которых они находятся. Причиной этого является то, что ось вращения ребер регулируется посредством позиции ребра на пластине и местоположения возбуждающего устройства. Ось вращения ребер типично находится около краев основания, на которых они находятся. Это создает дисбаланс, который приводит в результате к ошибкам и проблемам с калибровкой. Силы от синфазных мод вызывают фактическое перемещение в процессе соединения. Также, трубу и балансировочную штангу может быть трудно или невозможно возбуждать до равных, синфазных форм мод. Созданный дисбаланс может вести к ошибкам калибровки и измерения. Эти проблемы ограничивают эффективность реберных датчиков и делают их непрактичными для множества промышленных применений.
Соответственно, существует необходимость в улучшенном реберном датчике.
Сущность изобретения
Раскрывается вариант осуществления реберного датчика (102). Вариант осуществления реберного датчика (102) имеет основание (106), основание присоединяется к первому ребру (108a) и второму ребру (108b), реберный датчик (102) дополнительно имеет, по меньшей мере, два измерительных преобразователя (104a и 104b), присоединенных к ребрам (108a и 108b), первое ребро (108a) присоединяется ко второму ребру (108b) посредством, по меньшей мере, одного соединителя (120a и/или 120b) ребер.
Раскрывается другой вариант осуществления реберного датчика (102). Другой вариант осуществления реберного датчика (102) имеет основание (106) и уравновешивающее ребро (118), основание (106), присоединенное к первому ребру (108a) и второму ребру (108b), реберный датчик (102) дополнительно имеет, по меньшей мере, два измерительных преобразователя (104a и 104b), присоединенных к ребрам (108a и 108b), уравновешивающее ребро (118) присоединяется к одному или более из основания (106) и соединителя (116) основания.
Раскрывается вариант осуществления способа создания узла соединителя ребер. Вариант осуществления способа имеет узел соединителя ребер, по меньшей мере, с одним ребром (108a и/или 108b) и, по меньшей мере, одним соединителем (120a и/или 120b) ребер, способ содержит этапы формирования узла соединителя ребер, в котором, по меньшей мере, одно ребро (108a и/или 108b) присоединяется, по меньшей мере, к одному соединителю (120a и/или 120b) ребер.
Раскрывается вариант осуществления способа создания узла уравновешенного основания. Вариант осуществления способа создания узла уравновешенного основания включает в себя этапы формирования основания (106), формирования уравновешивающего ребра (118) и присоединения уравновешивающего ребра (118) к одному или более из основания (106) и соединителя (116) основания.
Раскрывается вариант осуществления способа использования реберного датчика (102). Вариант осуществления способа использования реберного датчика (102), реберный датчик (102) имеет возбуждающий преобразователь (104b), чтобы возбуждать вибрации в первом ребре (108a) и втором ребре (108b), первое и второе ребро (108a и 108b) присоединяются к основанию (106), реберный датчик (102) имеет, по меньшей мере, один преобразователь (104a) с чувствительным элементом, чтобы принимать ответные данные, способ имеет этап, по меньшей мере, частичного ограничения, посредством, по меньшей мере, одного соединителя (120a и/или 120b) ребер, перемещения первого ребра (108a) относительно перемещения второго ребра (108b).
Раскрывается вариант осуществления способа использования реберного датчика (102). Вариант осуществления способа использования реберного датчика (102) может иметь реберный датчик (102) с возбуждающим преобразователем (104b), чтобы возбуждать вибрации в первом ребре (108a) и втором ребре (108b), первое ребро (108a) и второе ребро (108b) присоединены к основанию (106), реберный датчик (102) имеет, по меньшей мере, один преобразователь (104a) с чувствительным элементом, чтобы принимать ответные данные, реберный датчик (102) имеет уравновешивающее ребро (118), способ имеет этап, по меньшей мере, частичного ограничения, посредством уравновешивающего ребра (118), перемещения основания (106).
Аспекты
Согласно аспекту, раскрывается вариант осуществления реберного датчика (102). Вариант осуществления реберного датчика (102) имеет основание (106), основание присоединяется к первому ребру (108a) и второму ребру (108b), реберный датчик (102) дополнительно имеет, по меньшей мере, два измерительных преобразователя (104a и 104b), присоединенных к ребрам (108a и 108b), первое ребро (108a) присоединяется ко второму ребру (108b) посредством, по меньшей мере, одного соединителя (120a и/или 120b) ребер.
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребер является стержнеобразным соединителем (220a) ребер.
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребер является распорной штангой (220c).
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребер является полосковым соединителем (220b) ребер.
Предпочтительно, полосковый соединитель (220b) ребер имеет, по меньшей мере, один сужающийся конец.
Предпочтительно, полосковый соединитель (220) ребер сужается так, что один или более из верхнего по потоку (143) конца и нижнего по потоку (145) конца полоскового соединителя (220b) ребер имеют меньшую площадь поперечного сечения в плоскости, определенной вертикальной осью (151) и поперечной осью (131), по сравнению с площадью поперечного сечения в плоскости, определенной вертикальной осью (151) и поперечной осью (131) для более центральной позиции по оси (141) потока для полоскового соединителя (220b) ребер.
Предпочтительно, поперечное сечение в плоскости, определенной вертикальной и поточной осями полоскового соединителя (220b) ребер, является более узким по вертикальной оси (151) на одном или более из верхнего по потоку (143) конца и нижнего по потоку (145) конца поперечного сечения по сравнению, по меньшей мере, с одним центральным фрагментом по оси (141) потока между верхним по потоку (143) концом и нижним по потоку (145) концом поперечного сечения.
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребра соединяет ребра (108a и 108b) в местоположениях, которые являются практически одинаковыми на соответствующих поверхностях ребер (108a и 108b).
Предпочтительно, ребра выполняются с возможностью иметь одинаковое размещение, так что, по меньшей мере, один соединитель (120a и/или 120b) ребер является параллельным поперечной оси (131), когда ребра (108a и 108b) размещаются в одной и той же или практически в одной и той же позиции в плоскости, определенной осью (141) потока и вертикальной осью (151).
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребер присоединяется в различных местоположениях на каждом из ребер (108a и 108b).
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребер присоединяется, по меньшей мере, к одному из ребер (108a и/или 108b) в площади или проецируемой площади поверхности, по меньшей мере, одного из ребер (108a и/или 108b), представленной самым нижним (155) и самым верхним по потоку (143) квадрантным фрагментом, по меньшей мере, одного из ребер (108a и/или 108b).
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребер присоединяется, по меньшей мере, к одному из ребер (108a и/или 108b) в площади или проецируемой площади поверхности, по меньшей мере, одного из ребер (108a и/или 108b), представленной самым нижним (155) и самым нижним по потоку (145) квадрантным фрагментом, по меньшей мере, одного из ребер (108a и/или 108b).
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребер присоединяется, по меньшей мере, к одному из ребер (108a и/или 108b) в площади или проецируемой площади поверхности, по меньшей мере, одного из ребер (108a и/или 108b), представленной самым нижним (155) и самым верхним по потоку (143) углом, по меньшей мере, одного из ребер (108a и/или 108b).
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребер присоединяется, по меньшей мере, к одному из ребер (108a и/или 108b) в площади или проецируемой площади поверхности, по меньшей мере, одного из ребер (108a и/или 108b), представленной самым нижним (155) и самым нижним по потоку (145) углом, по меньшей мере, одного из ребер (108a и/или 108b).
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребер присоединяется, по меньшей мере, к одному из ребер (108a и/или 108b) в площади или проецируемой площади поверхности, по меньшей мере, одного из ребер (108a и/или 108b), представленной центральным, составляющим одну девятую фрагментом, по меньшей мере, одного из ребер (108a и/или 108b).
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребер присоединяется, по меньшей мере, к одному из ребер (108a и/или 108b) в площади поверхности, по меньшей мере, одного из ребер (108a и/или 108b), представленной площадью или проецируемой площадью, определенной средним, составляющим одну треть фрагментом по вертикальной оси (151) и верхним по потоку (143), составляющим одну треть фрагментом, по меньшей мере, одного из ребер (108a и/или 108b).
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребер присоединяется, по меньшей мере, к одному из ребер (108a и/или 108b) в площади поверхности, по меньшей мере, одного из ребер (108a и/или 108b), представленной площадью или проецируемой площадью, определенной средним, составляющим одну треть фрагментом по вертикальной оси (151) и нижним по потоку (145), составляющим одну треть фрагментом, по меньшей мере, одного из ребер (108a и/или 108b).
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребер присоединяется, по меньшей мере, к одному из ребер (108a и/или 108b) в площади поверхности, по меньшей мере, одного из ребер (108a и/или 108b), представленной площадью или проецируемой площадью, определенной верхним (153), составляющим одну треть фрагментом и верхним по потоку (143), составляющим одну треть фрагментом, по меньшей мере, одного из ребер (108a и/или 108b).
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребер присоединяется, по меньшей мере, к одному из ребер (108a и/или 108b) в площади поверхности, по меньшей мере, одного из ребер (108a и/или 108b), представленной площадью или проецируемой площадью, определенной верхним (153), составляющим одну треть фрагментом и нижним по потоку (145), составляющим одну треть фрагментом, по меньшей мере, одного из ребер (108a и/или 108b).
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребер присоединяется, по меньшей мере, к одному из ребер (108a и/или 108b) в площади поверхности, по меньшей мере, одного из ребер (108a и/или 108b), представленной площадью или проецируемой площадью, определенной нижним (155), составляющим одну треть фрагментом и верхним по потоку (143), составляющим одну треть фрагментом, по меньшей мере, одного из ребер (108a и/или 108b).
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребер присоединяется, по меньшей мере, к одному из ребер (108a и/или 108b) в площади поверхности, по меньшей мере, одного из ребер (108a и/или 108b), представленной площадью или проецируемой площадью, определенной нижним (155), составляющим одну треть фрагментом по вертикальной оси (151) и нижним по потоку (145), составляющим одну треть фрагментом, по меньшей мере, одного из ребер (108a и/или 108b).
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребер присоединяется к первому ребру (108a) и второму ребру (108b) способом, который увеличивает осевую жесткость погруженных элементов реберного датчика (102).
Предпочтительно, ребра (108a и 108b) имеют выступы (114a и 114b) ребер, которые выступают через отверстия в основании (106), измерительные преобразователи (104a и 104b) присоединяются к ребрам (108a и 108b) на выступах (114a и 114b) ребер.
Предпочтительно, основание (106) имеет погружную сторону (342) и внешнюю сторону (344), выступы (114a и 114b) ребер выступают через основание (106) на внешнюю сторону (344).
Предпочтительно, выступы (114a и 114b) ребер имеют соответствующие сегменты, при этом соответствующие сегменты являются сегментами, которые, по меньшей мере, частично выровнены по поперечной оси (131).
Предпочтительно, измерительные преобразователи (104a и 104b), каждый присоединяются к двум соответствующим сегментам.
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребер присоединяется к ребрам (108a и 108b) на внешней стороне основания (106).
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребер присоединяется, по меньшей мере, к одному выступу (114a или 114b) ребра из выступов (114a или 114b) ребер.
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребер присоединяется к сегменту, по меньшей мере, одного выступа (114a или 114b) ребра.
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребер присоединяется к ребрам (108a и 108b) в позиции книзу (155) от соединения между ребрами (108a и 108b) и, по меньшей мере, двумя преобразователями (104a и 104b).
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребер присоединяется к ребрам (108a и 108b) на внешней стороне (344) основания (106) в позиции ближе к основанию (106) по сравнению с местоположением на ребрах (108a и/или 108b), в котором присоединяются преобразователи (104a-c).
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребер присоединяется к ребрам (108a и 108b) на внешней стороне (344) основания (106) в позиции ближе к местоположению на ребрах (108a и/или 108b), в котором присоединяются преобразователи (104a-c), по сравнению с основанием (106).
Предпочтительно, выступы (114a и 114b) ребер имеют соответствующие сегменты, при этом соответствующие сегменты являются сегментами, которые, по меньшей мере, частично выровнены по поперечной оси (131).
Предпочтительно, измерительные преобразователи (104a и 104b), каждый присоединяются к двум соответствующим сегментам.
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребер включает в себя первый соединитель (120a) ребер и второй соединитель (120b) ребер, первый соединитель (120a) ребер присоединяется к ребрам (108a и 108b) в местоположении выше по потоку от местоположения, в котором второй соединитель (120b) ребер присоединяется к ребрам (108a и 108b).
Предпочтительно, преобразователь (104a) с чувствительным элементом присоединяется к ребрам (108a и 108b) выше по потоку от того, где возбуждающий преобразователь (104b) присоединяется к ребрам (108a и 108b).
Предпочтительно, основание (106) является изменчивым основанием (306), которое имеет изменяющуюся твердость.
Предпочтительно, изменчивое основание (306) имеет более мягкий фрагмент в середине изменчивого основания (306) и более твердые фрагменты по краям изменчивого основания (306), середина и края являются серединой и краями изменчивого основания (306) по поперечной оси (131).
Предпочтительно, изменчивое основание (306) является более тонким в середине по сравнению с краями.
Предпочтительно, изменчивое основание (306) имеет изменяющийся состав материала вдоль поперечной оси (131).
Предпочтительно, изменчивое основание (306) имеет более мягкий материал в середине изменчивого основания (306) и более твердый материал по краям изменчивого основания (306) по поперечной оси (131).
Предпочтительно, реберный датчик (102) дополнительно содержит уравновешивающее ребро (118), которое присоединяется к одному или более из основания (106) и соединителя (116) основания, уравновешивающее ребро (118) конфигурируется, чтобы, по меньшей мере, частично ограничивать перемещение основания (106) по вертикальной оси (151) вдоль среднего фрагмента основания (106), средний фрагмент основания (106) является фрагментом, определенным серединой поперечной оси (131).
Предпочтительно, реберный датчик (102) дополнительно содержит измерительную электронную аппаратуру (112), один, по меньшей мере, из двух преобразователей (104a и 104b) является возбуждающим преобразователем (104b), измерительная электронная аппаратура (112) конфигурируется, чтобы передавать данные, представляющие команды возбуждающему преобразователю (104b), чтобы возбуждать ребра (108a и 108b) в одной или более из синфазной (IP) моды и несинфазной (OOP) моды.
Предпочтительно, другой, по меньшей мере, из двух преобразователей (104a и 104b) является преобразователем (104a) с чувствительным элементом, измерительная электронная аппаратура (112) принимает сигнальные данные от преобразователя (104a) с чувствительным элементом, чтобы поддерживать режимы возбуждения с помощью управляемого контура обратной связи.
Предпочтительно, один или более, по меньшей мере, из одного, по меньшей мере, из одного соединителя (120a и/или 120b) ребер и, по меньшей мере, одного из ребер (108a и/или 108b) имеет соединительный элемент, соединительный элемент сконфигурирован, чтобы соединять, по меньшей мере, один из, по меньшей мере, одного соединителя (120a и 120b) ребер, по меньшей мере, с одним из ребер (108a и/или 108b) через соединительный элемент.
Предпочтительно, первый соединитель (120a) ребер имеет соединительный элемент, и первое ребро (108a) имеет другой соединительный элемент (120b), при этом соединительный элемент является взаимодополняющим для другого соединительного элемента, так что соединительный элемент конфигурируется, чтобы присоединяться к другому соединительному элементу.
Предпочтительно, соединительный элемент является углублением в первом ребре (108a).
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребер не является ни элементом основания (106), ни какого-либо, по меньшей мере, из двух преобразователей (104a-c).
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребер влияет на перемещение ребер (108a и 108b) отлично от способа, в котором основание (106) влияет на перемещение ребер (108a и 108b) и от способа, в котором, по меньшей мере, два преобразователя (104a-c) влияют на перемещение ребер (108a и 108b).
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребер не присоединяется ни к основанию (106), ни к какому-либо, по меньшей мере, из двух преобразователей (104a-c).
Согласно аспекту, раскрывается другой вариант осуществления реберного датчика (102). Другой вариант осуществления реберного датчика (102) имеет основание (106) и уравновешивающее ребро (118), основание (106), присоединенное к первому ребру (108a) и второму ребру (108b), реберный датчик (102) дополнительно имеет, по меньшей мере, два измерительных преобразователя (104a и 104b), присоединенных к ребрам (108a и 108b), уравновешивающее ребро (118) присоединяется к одному или более из основания (106) и соединителя (116) основания.
Предпочтительно, уравновешивающее ребро (118) конфигурируется, чтобы, по меньшей мере, частично ограничивать перемещение основания (106) по вертикальной оси (151) вдоль среднего фрагмента основания (106), средний фрагмент основания (106) является фрагментом, определенным серединой поперечной оси (131).
Предпочтительно, уравновешивающее ребро (118) присоединяется к основанию (106) в среднем фрагменте основания (106).
Предпочтительно, уравновешивающее ребро (118) присоединяется к среднему фрагменту соединителя (116) основания.
Предпочтительно, уравновешивающее ребро (118) конфигурируется, чтобы, по меньшей мере, частично предотвращать фактическое перемещение ребер (108a и 108b) по вертикальной оси (151).
Предпочтительно, уравновешивающее ребро (118) присоединяется к основанию (106) между первым ребром (108a) и вторым ребром (108b).
Предпочтительно, уравновешивающее ребро (118) присоединяется к основанию (106) в позиции между позицией на основании (106), в которой первое ребро (108a) присоединяется или должно присоединяться, и другой позицией на основании (106), в которой второе ребро (108b) присоединяется или должно присоединяться, на поперечной оси (131).
Предпочтительно, уравновешивающее ребро (118) присоединяется равноудаленно от позиции и другой позиции на поперечной оси (131).
Предпочтительно, уравновешивающее ребро (118) присоединяется к основанию (106), так что центральная линия (198) уравновешивающего ребра (118) является параллельной оси (141) потока.
Предпочтительно, уравновешивающее ребро (118) является симметричным, по меньшей мере, по одной оси, относительно центральной линии (198).
Предпочтительно, уравновешивающее ребро (118) имеет толщину по поперечной оси (131) уравновешивающего ребра (118) на одном или более из нижнего по потоку (145) конца уравновешивающего ребра (118) и верхнего по потоку (143) конца уравновешивающего ребра (118), которая больше толщины по поперечной оси (131) среднего фрагмента уравновешивающего ребра (118).
Предпочтительно, уравновешивающее ребро (118) имеет толщину по поперечной оси (131) уравновешивающего ребра (118) на одном или более из нижнего по потоку (145) конца уравновешивающего ребра (118) и верхнего по потоку (143) конца уравновешивающего ребра (118), которая больше толщины по поперечной оси (131) среднего фрагмента уравновешивающего ребра (118).
Предпочтительно, реберный датчик (102) дополнительно содержит, по меньшей мере, один соединитель (120a и/или 120b) ребер, по меньшей мере, один соединитель (120a и/или 120b) ребер присоединен к ребрам (108a и 108b).
Предпочтительно, основание (106) является изменчивым основанием (306), которое имеет изменяющуюся твердость.
Предпочтительно, изменчивое основание (306) имеет более мягкий фрагмент в середине изменчивого основания (306) и более твердые фрагменты по краям изменчивого основания (306), середина и края являются серединой и краями изменчивого основания (306) по поперечной оси (131).
Предпочтительно, изменчивое основание (306) является более тонким в середине изменчивого основания (306) по сравнению с краями изменчивого основания (306) вдоль поперечной оси (131).
Предпочтительно, изменчивое основание (306) имеет изменяющийся состав материала вдоль поперечной оси (131).
Предпочтительно, изменчивое основание (306) имеет более мягкий материал в середине и более твердый материал по краям вдоль поперечной оси (131).
Предпочтительно, фрагмент изменчивого основания (306) между ребрами (108a и 108b) вдоль поперечной оси (131) является более мягким по сравнению с фрагментами изменчивого основания (306) между каждым из ребер (108a и 108b) и краями изменчивого основания (306) по поперечной оси (131).
Предпочтительно, более мягкий фрагмент (314) и более твердые фрагменты (310 и 312) могут быть сформированы посредством присоединения, по меньшей мере, одного из ребер (108a и 108b) ближе по поперечной оси (131) к краю изменчивого основания (106) по сравнению с уравновешивающим ребром (118).
Согласно аспекту, раскрывается вариант осуществления способа изготовления узла соединителя ребер. Вариант осуществления способа имеет узел соединителя ребра, по меньшей мере, с одним ребром (108a и/или 108b) и, по меньшей мере, одним соединителем (120a и/или 120b) ребер, способ содержит этапы формирования узла соединителя ребер, в котором, по меньшей мере, одно ребро (108a и/или 108b) присоединяется, по меньшей мере, к одному соединителю (120a и/или 120b) ребер.
Предпочтительно, соединительный узел формируется посредством формования, так что, по меньшей мере, один соединитель (120a и/или 120b) ребер формируется уже присоединенным, по меньшей мере, к одному ребру (120a и/или 120b).
Предпочтительно, формирование узла соединителя ребер включает в себя формирование соединителя (120a) ребер, при этом соединитель (120a) ребер отличается от основания (106) и преобразователя (104a-c).
Предпочтительно, формирование узла соединителя ребер дополнительно включает в себя формирование ребра (108a), по меньшей мере, одного ребра (108a и/или 108b) и присоединение соединителя (120a) ребер, по меньшей мере, из одного соединителя (120a и/или 120b) ребер к ребру (108a).
Предпочтительно, присоединение соединителя (120a) ребер к ребру (108a) содержит присоединение соединителя (120a) ребер к ребру (108a) в позиции ближе к свободному краю (199) ребра (108a) по сравнению с позицией ребра (108a), которое присоединяется или должно присоединяться к основанию (106).
Предпочтительно, способ дополнительно включает в себя присоединение первого соединителя (120a) ребер, по меньшей мере, из одного соединителя (120a и/или 120b) ребер к обоим ребрам (108a и 108b) и присоединение второго соединителя (120b) ребер, по меньшей мере, из одного соединителя (120a и/или 120b) ребер к обоим ребрам (108a и 108b), при этом первый соединитель (120a) ребер присоединяется, по меньшей мере, в одной позиции, которая является или будет в другой точке на оси (141) потока по сравнению, по меньшей мере, с одной позицией, в которой второй соединитель (120b) ребер присоединяется.
Предпочтительно, формирование узла соединителя ребер содержит формирование одного или более, по меньшей мере, из одного ребра (108a и/или 108b) и, по меньшей мере, одного соединителя (120a и/или 120b) ребер с соединительным элементом, сконфигурированным, чтобы обеспечивать присоединение между, по меньшей мере, одним ребром (108a и/или 108b) и, по меньшей мере, одним соединителем (120a и/или 120b) ребер.
Предпочтительно, по меньшей мере, одно ребро (108a и/или 108b) присоединяется, по меньшей мере, к одному соединителю (120a и/или 120b) ребер на фрагменте, по меньшей мере, одного соединителя (120a и/или 120b) ребер, который находится или будет находиться на погружной стороне (342) основания (106).
Предпочтительно, по меньшей мере, одно ребро (108a и/или 108b) присоединяется, по меньшей мере, к одному соединителю (120a и/или 120b) ребер на фрагменте, по меньшей мере, одного соединителя (120a и/или 120b) ребер, который находится или будет находиться на внешней стороне (344) основания (106).
Предпочтительно, способ дополнительно включает в себя формирование уравновешивающего ребра (118) и присоединение уравновешивающего ребра (118) к одному или более из основания (106) и соединителя (116) основания.
Предпочтительно, основание (106) формируется как изменчивое основание (306) с переменной твердостью.
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребер формируется как стержнеобразный соединитель (220a) ребер.
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребер формируется как распорная штанга (220c).
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребер формируется как полосковый соединитель (220a) ребер.
Предпочтительно, способ дополнительно включает в себя формирование основания (106) и присоединение основания (106) к ребрам (108a и 108b).
Предпочтительно, ребра (108a и 108b) формируются имеющими выступы (114a и 114b) ребер, которые выступают через отверстия в основании (106), по меньшей мере, один измерительный преобразователь (104a и/или 104b) присоединяется к ребрам (108a и 108b) на выступах (114a и 114b) ребер.
Предпочтительно, выступы (114a и 114b) ребер формируются с соответствующими сегментами, при этом соответствующие сегменты являются сегментами, которые, по меньшей мере, частично выравниваются по поперечной оси (131), по меньшей мере, один соединитель (120a и/или 120b) ребер присоединяется к ребрам (108a и 108b) в соответствующих сегментах.
Предпочтительно, основание (106) формируется как изменчивое основание (306) с переменной твердостью.
Предпочтительно, изменчивое основание (306) формируется как более мягкое в среднем фрагменте изменчивого основания (306) по сравнению с краями изменчивого основания (306) по поперечной оси (131).
Предпочтительно, способ дополнительно включает в себя присоединение уравновешивающего ребра (118) к одному или более из основания (106) и соединителя (116) основания.
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребер присоединяется к ребрам (108a и 108b), по меньшей мере, в одном местоположении в первом направлении (133) от уравновешивающего ребра (118) и, по меньшей мере, в одном местоположении во втором направлении (135) уравновешивающего ребра (118).
Предпочтительно, способ дополнительно включает в себя формирование измерительной электронной аппаратуры (112) и соединение с возможностью связи измерительной электронной аппаратуры (112) с преобразователями (104a и/или 104b и/или 104c), измерительная электронная аппаратура (112) имеет процессор и память, память сконфигурирована, чтобы хранить команды и данные для того, чтобы процессор исполнял операции, и конфигурирование измерительной электронной аппаратуры (112) возбуждаться в синфазных и несинфазных модах.
Согласно аспекту, раскрывается вариант осуществления способа изготовления узла уравновешенного основания. Вариант осуществления способа создания узла уравновешенного основания включает в себя этапы формирования основания (106), формирования уравновешивающего ребра (118) и присоединения уравновешивающего ребра (118) к одному или более из основания (106) и соединителя (116) основания.
Предпочтительно, основание (106) формируется как изменчивое основание (306).
Предпочтительно, изменчивое основание (306) формируется посредством изменения толщины изменчивого основания (306) при формовании или посредством отрезания фрагмента изменчивого основания (306).
Предпочтительно, толщина изменяется так, что середина изменчивого основания (306) является более тонкой по сравнению с краями изменчивого основания (306) по поперечной оси (131).
Предпочтительно, изменчивое основание (306) формируется посредством изменения материала, из которого изменчивое основание (306) состоит, по меньшей мере, вдоль поперечной оси (131).
Предпочтительно, изменение материала содержит составление, по меньшей мере, части изменчивого основания (306) материала в середине изменчивого основания (306), которая является более мягкой по сравнению с материалом на краях изменчивого основания (306) по поперечной оси (131).
Предпочтительно, формирование уравновешивающего ребра (118) содержит формирование уравновешивающего ребра (118) как вытянутого элемента.
Предпочтительно, присоединение уравновешивающего ребра (118) к основанию (106) содержит присоединение уравновешивающего ребра (118) к основанию (106) в позиции в середине основания (106) на поперечной оси (131).
Предпочтительно, присоединение уравновешивающего ребра (118) к основанию (106) содержит присоединение уравновешивающего ребра (118) к основанию (106) в позиции между позицией на основании (106), в которой первое ребро (108a) присоединяется или должно присоединяться, и другой позицией на основании (106), в которой второе ребро (108b) присоединяется или должно присоединяться, позиция и другая позиция находятся на поперечной оси (131).
Предпочтительно, присоединение уравновешивающего ребра (118) к основанию (106) в позиции между позицией на основании (106), в которой первое ребро (108a) присоединяется или должно присоединяться, и другой позицией на основании (106), в которой второе ребро (108b) присоединяется или должно присоединяться, на поперечной оси (131) содержит присоединение уравновешивающего ребра (118) равноудаленно от позиции и другой позиции на поперечной оси (131).
Предпочтительно, присоединение уравновешивающего ребра (118) к основанию (106) содержит присоединение уравновешивающего ребра (118) к основанию (106) с центральной линией (198) уравновешивающего ребра (118), параллельной оси (141) потока.
Предпочтительно, формирование уравновешивающего ребра (118) содержит формирование уравновешивающего ребра (118) так, что уравновешивающее ребро (118) является симметричным, по меньшей мере, по одной оси, относительно центральной линии (198).
Предпочтительно, формирование уравновешивающего ребра (118) дополнительно содержит формирование уравновешивающего ребра (118) так, что толщина по поперечной оси (131) уравновешивающего ребра (118) на одном или более из нижнего по потоку (145) конца уравновешивающего ребра (118) и верхнего по потоку (143) конца уравновешивающего ребра (118) меньше толщины по поперечной оси (131) среднего фрагмента уравновешивающего ребра (118) по оси (141) потока.
Предпочтительно, формирование уравновешивающего ребра (118) дополнительно содержит формирование уравновешивающего ребра (118) так, что толщина по поперечной оси (131) уравновешивающего ребра (118) на одном или более из нижнего по потоку (145) конца уравновешивающего ребра (118) и верхнего по потоку (143) конца уравновешивающего ребра (118) больше толщины по поперечной оси (131) среднего фрагмента уравновешивающего ребра (118) по оси (141) потока.
Предпочтительно, способ дополнительно включает в себя формирование ребер (108a и 108b) и присоединение ребер (108a и 108b) к основанию (106).
Предпочтительно, способ дополнительно включает в себя формирование, по меньшей мере, одного соединителя (120a и/или 120b) ребер и присоединение, по меньшей мере, одного соединителя (120a и/или 120b) ребер к ребрам (108a и 108b).
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребер присоединяется к первому из ребер (120a) в первом направлении (133) от уравновешивающего ребра (118), и, по меньшей мере, один соединитель (120a и/или 120b) ребер присоединяется ко второму из ребер (120b) во втором направлении (135) от уравновешивающего ребра (118).
Предпочтительно, по меньшей мере, одно из ребер (108a и/или 108b) присоединяется к основанию (106) в позиции, которая находится в первом направлении (133) от уравновешивающего ребра (118), и позиция находится ближе к краю основания (106), которое находится в первом направлении (133) от уравновешивающего ребра (118), по сравнению с уравновешивающим ребром (118), по поперечной оси (131).
Предпочтительно, по меньшей мере, одно из ребер (108a и/или 108b) присоединяется к основанию (106) в позиции, которая находится в первом направлении (133) от уравновешивающего ребра (118), и позиция находится дальше от края основания (106), которое находится в первом направлении (133) от уравновешивающего ребра (118), по сравнению с уравновешивающим ребром (118), по поперечной оси (131).
Предпочтительно, способ дополнительно включает в себя формирование измерительной электронной аппаратуры (112) и соединение с возможностью связи измерительной электронной аппаратуры (112) с преобразователями (104a и/или 104b и/или 104c), измерительная электронная аппаратура (112) имеет процессор и память, память сконфигурирована, чтобы хранить команды и данные для того, чтобы процессор исполнял операции, и конфигурирование измерительной электронной аппаратуры (112), чтобы возбуждать ребра (108a и 108b) в синфазных и несинфазных модах.
Согласно аспекту, раскрывается вариант осуществления способа использования реберного датчика (102). Вариант осуществления способа использования реберного датчика (102), реберный датчик (102) имеет возбуждающий преобразователь (104b), чтобы возбуждать вибрации в первом ребре (108a) и втором ребре (108b), первое и второе ребро (108a и 108b) присоединяются к основанию (106), реберный датчик (102) имеет, по меньшей мере, один преобразователь (104a) с чувствительным элементом, чтобы принимать ответные данные, способ имеет этап, по меньшей мере, частичного ограничения, посредством, по меньшей мере, одного соединителя (120a и/или 120b) ребер, перемещения первого ребра (108a) относительно перемещения второго ребра (108b).
Предпочтительно, по меньшей мере, частичное ограничение, по меньшей мере, посредством одного соединителя (120a и/или 120b) ребер, перемещения первого ребра (108a) относительно перемещения второго ребра (108b) включает в себя, по меньшей мере, частичное ограничение перемещения свободного края (199) первого ребра (108a) относительно свободного края (199) второго ребра (108b).
Предпочтительно, вибрации возбуждаются посредством возбуждающего преобразователя (104b), чтобы возбуждать ребра (108a и 108b) в несинфазной (OOP) моде.
Предпочтительно, несинфазная (OOP) мода представляет фазовое разделение между перемещением первого ребра (108a) и второго ребра (108b), равное примерно 180º.
Предпочтительно, по меньшей мере, частичное ограничение, посредством, по меньшей мере, одного соединителя (120a и/или 120b) ребер, перемещения первого ребра (108a) относительно перемещения второго ребра (108b) содержит, по меньшей мере, частичное ограничение перемещения первого ребра (108a) в любом месте, в котором, по меньшей мере, один соединитель (120a и/или 120b) ребер присоединяется к первому ребру (108a), относительно перемещения второго ребра (108b).
Предпочтительно, по меньшей мере, один соединитель (120a и/или 120b) ребер не ограничивает непосредственно перемещение какого-либо элемента основания (106), по меньшей мере, один соединитель (120a и/или 120b) ребер не присоединяется к элементу основания (106).
Предпочтительно, способ дополнительно включает в себя, по меньшей мере, частичное ограничение перемещения основания (106) с уравновешивающим ребром (118).
Согласно аспекту, раскрывается вариант осуществления способа использования реберного датчика (102). Вариант осуществления способа использования реберного датчика (102) может иметь реберный датчик (102) с возбуждающим преобразователем (104b), чтобы возбуждать вибрации в первом ребре (108a) и втором ребре (108b), первое ребро (108a) и второе ребро (108b) присоединены к основанию (106), реберный датчик (102) имеет, по меньшей мере, один преобразователь (104a) с чувствительным элементом, чтобы принимать ответные данные, реберный датчик (102) имеет уравновешивающее ребро (118), способ имеет этап, по меньшей мере, частичного ограничения, посредством уравновешивающего ребра (118), перемещения основания (106).
Предпочтительно, по меньшей мере, частичное ограничение, посредством уравновешивающего ребра (118), перемещения основания (106) включает в себя, по меньшей мере, частичное ограничение перемещения основания (106) по вертикальной оси (151) вдоль среднего фрагмента основания (106), средний фрагмент является фрагментом, определенным серединой поперечной оси (131).
Предпочтительно, по меньшей мере, частичное ограничение, посредством уравновешивающего ребра (118), перемещения основания (106) включает в себя, по меньшей мере, частичное предотвращение фактического перемещения ребер (108a и 108b) по вертикальной оси (151).
Предпочтительно, по меньшей мере, частичное ограничение, посредством уравновешивающего ребра (118), перемещения основания (106) включает в себя, по меньшей мере, частичное предотвращение фактического перемещения реберного датчика (102) по вертикальной оси (151).
Предпочтительно, по меньшей мере, частичное ограничение перемещения основания (106) включает в себя, по меньшей мере, частичное ограничение основания (106) в позиции между позицией на основании (106), в которой первое ребро (108a) присоединяется или должно присоединяться, и другой позицией на основании (106), в которой второе ребро (108b) присоединяется или должно присоединяться, на поперечной оси (131).
Предпочтительно, по меньшей мере, частичное ограничение перемещения основания (106) включает в себя, по меньшей мере, частично ограничение перемещения основания (106) в позиции, равноудаленной от позиции и другой позиции на поперечной оси (131).
Предпочтительно, по меньшей мере, частичное ограничение перемещения основания (106) содержит, по меньшей мере, частичное ограничение перемещения основания (106), по меньшей мере, вдоль линейного фрагмента основания (106), который является параллельным оси (141) потока.
Предпочтительно, по меньшей мере, частичное ограничение перемещения основания (106) включает в себя, по меньшей мере, частичное ограничение перемещения основания (106), так что перемещение одного или более из нижнего по потоку (145) конца основания (106) и верхнего по потоку (143) конца основания (106) ограничивается меньше по сравнению с серединой основания (106), середина основания (106) является серединой основания (106) по оси (141) потока.
Предпочтительно, по меньшей мере, частичное ограничение перемещения основания (106) включает в себя, по меньшей мере, частичное ограничение перемещения основания (106), так что перемещение одного или более из нижнего по потоку (145) конца основания (106) и верхнего по потоку (143) конца основания (106) ограничивается больше по сравнению с серединой основания (106), середина основания (106) является серединой основания (106) по оси (141) потока.
Краткое описание чертежей
Один и тот же ссылочный номер представляет один и тот же элемент на всех чертежах. Должно быть понятно, что чертежи необязательно начерчены в масштабе.
Фиг. 1 показывает вид в перспективе варианта осуществления системы 100 датчика расхода с датчиком реберного типа.
Фиг. 2A показывает вид в перспективе варианта осуществления узла 200a соединителя ребер и стержнеобразного соединителя 220a ребер.
Фиг. 2B показывает вид в перспективе варианта осуществления узла 200b соединителя ребер и полоскового соединителя 220b ребер.
Фиг. 2C показывает вид в перспективе варианта осуществления узла 200c соединителя ребер с имеющим форму распорной штанги соединителем 220c ребер.
Фиг. 3 является видом в поперечном сечении варианта осуществления системы 300 датчика расхода с реберным датчиком 302, имеющим изменчивое основание 306 в узле уравновешенного основания.
Фиг. 4 показывает блок-схему варианта осуществления компьютерной системы 400. В варианте осуществления компьютерная система 400 может быть измерительной электроникой, например, измерительной электроникой 112.
Фиг. 5 показывает блок-схему последовательности операций варианта осуществления способа 500 для использования узла соединителя ребер реберного датчика 102.
Фиг. 6 показывает блок-схему последовательности операций варианта осуществления способа 600 для использования узла уравновешенного основания реберного датчика 102.
Фиг. 7 показывает блок-схему последовательности операций варианта осуществления способа 700 изготовления узла соединителя ребер реберного датчика 102.
Фиг. 8 показывает блок-схему последовательности операций варианта осуществления способа 800 изготовления узла уравновешенного основания реберного датчика 102.
Фиг. 9 показывает блок-схему последовательности операций варианта осуществления способа 900 изготовления узла уравновешенного основания и соединителя ребер реберного датчика 102.
Фиг. 10 показывает сравнение 1000 вариантов осуществления реберного датчика 102 с и без соединителей 120a и 120b ребер на погружной стороне 342 основания 106, возбуждаемого в синфазных (IP) модах и несинфазных (OOP) модах.
Фиг. 11 показывает сравнение 1100 вариантов осуществления реберного датчика 102 с и без уравновешивающего ребра 118 в недеформированной и деформированной позициях.
Фиг. 12 показывает сравнение 1200 вариантов осуществления реберного датчика 102 с и без соединителей 120a и 120b ребер на внешней стороне 344 основания 106, возбуждаемого в синфазных (IP) модах и несинфазных (OOP) модах.
Подробное описание изобретения
Фиг. 1-12 и последующее описание изображают конкретные примеры для обучения специалистов в области техники тому, как изготавливать и использовать оптимальный режим вариантов осуществления узлов соединителя ребер и узлов уравновешенного основания для реберных датчиков. В целях обучения принципам изобретения некоторые традиционные аспекты были упрощены или опущены. Специалисты в данной области техники поймут вариации из этих примеров, которые попадают в рамки настоящего описания. Специалисты в области техники поймут, что признаки, описанные ниже, могут быть объединены различными способами, чтобы формировать множество разновидностей узлов соединителя ребер и узлов уравновешенного основания для реберных датчиков. В результате, варианты осуществления, описанные ниже, не ограничиваются конкретными примерами, описанными ниже, а только формулой изобретения и ее эквивалентами.
Фиг. 1 показывает вид в перспективе варианта осуществления системы 100 датчика расхода с датчиком реберного типа. Система 100 имеет реберный датчик 102 с верхним по потоку преобразователем 104a, возбуждающим преобразователем 104b, нижним по потоку преобразователем 104c, основанием 106, первым ребром 108a, вторым ребром 108b, трубопроводом 110 (не показан), измерительной электронной аппаратурой 112 (не показана), первым выступом 114a ребра, вторым выступом 114b ребра, соединителем 116 основания, уравновешивающим ребром 118, первым соединителем 120a ребер, вторым соединителем 120b ребер, поперечной осью 131, имеющей первое направление 133 и второе направление 135, осью 141 потока, имеющей направление 143 вверх по потоку и направление 145 вниз по потоку, и вертикальной осью 151, имеющей направление 153 вверх, направление 155 вниз, наконечником уравновешивающего ребра 196, средним фрагментом уравновешивающего ребра 197, центральной линией уравновешивающего ребра 198 и свободными краями 199. Изображения на фиг. 1-4 и фиг. 10-12 могут не быть в масштабе относительно различных вариантов осуществления системы 100.
Система 100 регулирования потока может определять свойства потока с помощью реберного датчика 102. Например, реберный датчик 102 может возбуждать элементы реберного датчика 102, с помощью преобразователя возбуждать вибрации в элементах реберного датчика 102. Преобразователи могут быть любым типом возбуждающего устройства или устройства тензодатчика, например, пьезоустройством или компоновкой магнита и катушки. Какие-либо, некоторые или все преобразователи могут измерять разности фаз или времени сигналов, измеряемых посредством преобразователей, для того, чтобы определять характеристики потока, например, определять массовые расходы. В варианте осуществления реберный датчик 102 является расходомером Кориолиса, который использует компоновки преобразователей, которые могут полагаться на силы Кориолиса относительно элементов в реберном датчике 102, чтобы формировать эти расходы. Разности фаз или временные задержки могут быть созданы посредством возбуждающих элементов и измерительных элементов, например, посредством вибрации основания и измерения реакции в измерительных преобразователях, посредством вибрации ребер и измерения реакции на ребрах, или посредством сравнения сигнала, используемого для формирования вибрации (возбуждающего сигнала) с реакцией на ребрах. Показания измерений расхода могут быть сформированы из разностей фаз и/или сигналов частотной характеристики, полученных посредством преобразователей 104a-c. Реберный датчик 102 может быть использован для формирования показателей измерения плотности посредством определения частот колебаний и с помощью способов, известных в области техники, чтобы определять плотности из этих частот. Например, показатели измерения плотности могут быть сформированы из сигналов частотной характеристики, полученных посредством преобразователей 104a-c. Показатели измерения вязкости могут быть получены в реберном датчике 102 из измеренных преобразователем разностей фаз или временных задержек, например, на основе двух возбужденных нерезонансной частотой разностей фаз, возможно теоретически выведенных. Способы измерения расхода, плотности и вязкости для вибрационных измерителей, все являются прочно установившимися на уровне техники. Ребра могут быть присоединены в конкретных местоположениях с помощью соединителей ребер. В различных вариантах осуществления реберный датчик 102 может быть одним или более из расходомера Кориолиса, реберного измерителя или вилочного измерителя (возможно либо с ребрами, либо с зубцами).
Соединители 120a и 120b ребер могут быть использованы для улучшения расщепления мод между синфазными (далее в данном документе "IP") модами и несинфазными (далее в данном документе "OOP") модами. В варианте осуществления OOP-мода может быть модой, в которой первое ребро 108a и второе ребро 108b вибрируют с разностью фаз, которая равна или приблизительно равна 180º друг от друга. Дополнительно, соединители ребер могут привносить более завихренное движение, чтобы улучшать чувствительность измерений реберного датчика 102. В вариантах осуществления основание 106 может быть пластиной с тонким средним фрагментом и толстым внешним фрагментом вдоль поперечной оси 131. Основание 106 может также иметь уравновешивающее ребро 118, чтобы управлять изгибом, и может ограничивать фактическое перемещение реберного датчика 102 по вертикальной оси 151 относительно трубопровода, к которому основание присоединяется.
В варианте осуществления реберный датчик 102 может иметь два ребра, первое ребро 108a и второе ребро 108b. Первое ребро 108a и второе ребро 108b являются ребрами, которые, по меньшей мере, частично погружаются в протекающую текучую среду во время работы реберного датчика 102. Рассматриваются варианты осуществления, в которых используется больше ребер. Например, рассматриваются варианты осуществления, имеющие 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16 или более ребер. В других вариантах осуществления зубцы могут быть использованы вместо ребер, при этом зубцы имеют некоторые или все те же свойства и компоновки, что и ребра 108a и 108b, раскрытые в этой спецификации. Когда спецификация ссылается на ребра, спецификация также рассматривает варианты осуществления, в которых используются зубцы.
Ребра 108a и 108b могут быть размещены параллельно друг другу и могут быть размещены со своими длинами, параллельными или практически параллельными ожидаемому пути потока текучей среды в трубопроводе. Ребра 108a и 108b могут быть размещены так, что они имеют фрагменты, которые протягиваются через основание 106, ребра 108a и 108b возможно имеют выступы 114a и 114b ребер на стороне основания 106 (внешней стороне 344 на фиг. 3), которая не имеет фрагментов ребер 108a и 108b, которые должны быть погружены в протекающую текучую среду (сторона с погружными элементами является погружной стороной 342, показанной на фиг. 3).
Ребра 108a и 108b могут иметь свободные края 199, свободный край 199 возможно определен как самый нижний 155 край ребер. Соединители ребер (например, соединители 120a и 120b) могут быть использованы, чтобы ограничивать перемещение свободного края 199 первого ребра 108a относительно присоединенного второго ребра 108b, возможно посредством соединительной части свободного края 199 первого ребра 108a к части свободного края 199 второго ребра 108b или возможно посредством присоединения других частей ребер 108a и 108b.
Ребра 108a и 108b могут быть присоединены друг к другу с помощью одного или более соединителей ребер. Соединители 120a и 120b ребер являются элементами, которые соединяют перемещение ребер 108a и 108b в конкретных местоположениях на ребрах 108a и 108b. В целях этой спецификации, первый соединитель 120a ребер показан как верхний по потоку 143 соединитель ребер относительно второго соединителя 120b ребер. В различных вариантах осуществления любое число соединителей ребер может быть использовано для соединения соседних ребер и/или несоседних ребер. Например, соединители, которые соединяют каждый набор соединенных ребер, могут быть 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16 и любым другим числом соединителей 120a и 120b. В различных вариантах осуществления некоторое число ребер может быть соединено, и некоторое число ребер может быть не соединено, например, все ребра, три четверти ребер, две трети ребер, половина ребер, четверть ребер, треть ребер, одна восьмая часть ребер, одна десятая часть ребер или т.п. соотношение ребер может быть соединено.
В варианте осуществления одно, сочетание или все ребра 108a и 108b могут протягиваться или в значительной степени протягиваться на всю длину основания 106. Например, в значительной степени в этом контексте может означать, что ребра не протягиваются до фрагмента основания 106, который используется для присоединения основания к трубопроводу, или фрагмента основания непосредственно рядом с фрагментом основания 106, который присоединяется к трубопроводу 110 и/или соединителю 116 основания.
Трубопровод 110 является трубопроводом, по которому текучая среда может протекать. Любой тип трубопровода, известный на уровне техники, может быть использован. Трубопровод 110 не показан на фиг. 1, но проточные трубопроводы и способы, которыми расходомеры, например, реберный датчик 102, присоединяются к трубопроводам, являются хорошо известными в области расходомеров.
Соединители 120a и 120b ребер могут соединять ребра 108a и 108b в любом числе местоположений между ребрами. Например, соединители 120a и 120b ребер могут соединять ребра 108a и 108b в местоположениях, которые являются практически одинаковыми на соответствующих поверхностях ребер 108a и 108b, возможно при этом ребра выполнены с возможностью иметь одинаковое размещение, так что соединители 120a и 120b ребер являются параллельными или практически параллельными поперечной оси 131, когда ребра 108a и 108b размещаются в одной и той же позиции на плоскости, определенной потоком и вертикальными осями 141 и 151 (например, если ребра имеют одинаковую форму и размер), или соединители 120a и 120b ребер могут быть присоединены в различных местоположениях на каждом из соответствующих ребер 108a и 108b. Соединители 120a и 120b ребер могут быть присоединены к одному или более ребрам 108a и 108b в одном, сочетании, или всех из позиции в области, по меньшей мере, одного из ребер 108a и 108b, представленной самым нижним 155 и верхним по потоку 143 квадрантным фрагментом, по меньшей мере, одного из ребер 108a и 108b (квадрант возможно не включает в себя центральную позицию, по меньшей мере, одного из, по меньшей мере, одного из ребер 108a и 108b), самым нижним 155 и нижним по потоку 145 квадрантным фрагментом, по меньшей мере, одного из ребер 108a и 108b (квадрант возможно не включает в себя центральную позицию, по меньшей мере, одного из, по меньшей мере, одного из ребер 108a и 108b), самым нижним 155 и верхним по потоку 143 углом, по меньшей мере, одного из ребер 108a и 108b, самым нижним 155 и нижним по потоку 145 углом, по меньшей мере, одного из ребер 108a и 108b, центральным фрагментом одной девятой площади, по меньшей мере, одного из ребер 108a и 108b, области, определенной средним фрагментом одной третьей площади по вертикальной оси 151 и верхним по потоку 143 одним третьим фрагментом, по меньшей мере, одного из ребер 108a и 108b, области, определенной средним одним третьим фрагментом по вертикальной оси 151 и нижним по потоку 145 одним третьим фрагментом, по меньшей мере, одного из ребер 108a и 108b, области, определенной верхним 153 одним третьим фрагментом по вертикальной оси 151 и верхним по потоку 143 одним третьим фрагментом, по меньшей мере, одного из ребер 108a и 108b, области, определенной верхним 153 одним третьим фрагментом по вертикальной оси 151 и нижним по потоку 145 одним третьим фрагментом, по меньшей мере, одного из ребер 108a и 108b, области, определенной нижним 155 одним третьим фрагментом по вертикальной оси 151 и верхним по потоку 143 одним третьим фрагментом, по меньшей мере, одного из ребер 108a и 108b, области, определенной нижним 155 одним третьим фрагментом по вертикальной оси 151 и нижним по потоку 145 одним третьим фрагментом, по меньшей мере, одного из ребер 108a и 108b, и/или т.п.
Рассматриваются варианты осуществления, в которых поверхности ребер не имеют плоских поверхностей. В этом случае, области, сформулированные в предыдущем параграфе, могут представлять проекции от таких относительных площадей наибольшего поперечного сечения ребра в любой плоскости, определенной поточной и вертикальной осями 141 и 151, соответственные площади, спроецированные на площади поверхности ребра (например, внутренней поверхности ребра 108a), которая обращена к внутренней поверхности другого ребра (например, внутренней поверхности ребра 108b), спроецированной по линиям на поперечной оси. Для целей формулы изобретения они называются "спроецированными площадями".
Соединители 120a и 120b ребер могут быть различных форм и структур. Например, один или более соединителей 120a и 120b ребер могут быть, например, стержнеобразными или цилиндрическими, распорными штангами, балками (возможно с поперечными сечениями относительно плоскости, определенной потоковой и вертикальной осями 141 и 151, квадратной, круглой, треугольной, другой многоугольной формы, эллиптической и/или т.п., когда не существует потока), полосами с плоскими областями (которые являются либо плоскими, либо практически плоскими относительно плоскости, определенной потоковой и вертикальной осями 141 и 151, или являются плоскими относительно плоскости, определенной вертикальной и поперечной осями 151 и 131, когда не существует поток), спиралями и/или т.п. Сочетания различных форм соединителей 120a и/или 120b ребер рассматриваются этой спецификацией, например, реберный датчик 102 может иметь верхний по потоку соединитель 120a ребер, который является стержнем, и нижний по потоку соединитель 120b ребер, который представлен одной или более распорными штангами. Они являются просто примерами, и все сочетания форм и утверждений рассматриваются спецификацией.
Соединители 120a и 120b ребер могут быть составлены из любого числа материалов и могут быть из материалов, отличных от одного, любого сочетания или всех из трубопровода 110, основания 106, преобразователей 104a-c, ребер 108a и 108b и/или фрагментов ребер 108a и 108b, в которых соединители 120a и/или 120b ребер присоединяются. Соединители 120a и 120b ребер могут состоять из одинаковых материалов повсюду в реберном датчике 102 или могут иметь различающиеся составы между собой.
Один или более соединителей 120a и 120b ребер могут быть выполнены из гибкого материала, чтобы предоставлять возможность некоторого изгиба и гибкости моды в одном или более соединителях 120a и 120b ребер, возможно улучшая гибкость перемещения одного или более ребер 108a и 108b или одного или более соединителей 120a и 120b ребер в некоторых модах по сравнению с другими модами. Один или более соединителей 120a и 120b ребер могут быть выполнены из жесткого материала, чтобы ограничивать изгиб и гибкость моды в одном или более соединителях 120a и 120b ребер, возможно улучшая гибкость перемещения одного или более ребер 108a и 108b или одного или более соединителей 120a и 120b ребер в некоторых модах по сравнению с другими модами. Соединители 120a и 120b ребер могут быть собраны с ребрами 108a и 108b, узлы называются в этой спецификации узлами соединителей ребер.
Соединители 120a и 120b ребер могут увеличивать завихрение для ребер 108a и 108b, когда ребра 120a и 120b возбуждаются в несинфазной моде. Соединители 120a и 120b ребер могут увеличивать осевую жесткость, которая может приводить в результате к увеличенному завихрению. Увеличенное завихрение может предоставлять возможность реберному датчику 102 лучше соединять ребра с текучей средой и индуцировать реакции Кориолиса, возможно аналогичные типичным массовым расходомерам Кориолиса, вилочным измерителям или реберным измерителям. Также, завихрение, создаваемое в ребрах 108a и 108b посредством включения соединителей 120a и 120b ребер в несинфазной моде, может предоставлять другую, потенциально более высокую, частоту по сравнению с аналогично возбуждаемым реберным датчиком 102 в синфазной моде, потенциально создавая разделение мод. Осевая жесткость, обеспечиваемая соединителями 120a и 120b ребер, может также вынуждать концы на свободном крае 199 ребер 108a и 108b быть неподвижными, практически неподвижными, или, по меньшей мере, ограничивать подвижность свободных краев ребер 108a и 108b относительно подвижности, которую ребра 108a и 108b имели бы, если бы ребра 108a и 108b не были соединены соединителями 120a и 120b ребер, вероятно уменьшая их торможение в протекающей среде и возможно индуцируя меньшие воздействия на взаимодействие текучей среды и конструкции.
Соединители 120a и 120b ребер должны пониматься как функциональные элементы, которые функционируют отдельно для основания 106 и преобразователей 104a-c. Соединители 120a и 120b ребер могут быть отдельными от основания 106 и преобразователей 104a-c, и соединители 120a и 120b ребер могут быть элементами, которые не соединяются с одним или более преобразователями 104a-c и основанием 106 (возможно не соединяются с тем или другим). В этой компоновке соединители 120a и 120b ребер могут влиять на перемещение ребер 108a и 108b отлично от способа, в котором основание 106 и преобразователи 104a-c влияют на перемещение ребер 108a и 108b.
В целях этой спецификации, узел соединителя ребер является узлом, в котором, по меньшей мере, одно ребро (108a и/или 108b) присоединяется, по меньшей мере, к одному соединителю (120a и/или 120b) ребер. Рассматриваются варианты осуществления, в которых соединяются больше соединителей ребер и ребер. Например, в варианте осуществления, узел соединителя ребер имеет два ребра (108a и 108b), соединенных, например, посредством двух (120a и 120b, как показано), трех, четырех, пяти, шести или более соединителей ребер. В дополнительных вариантах осуществления узлы соединителя ребер могут иметь соединительные элементы, которые используются для присоединения ребер к соединителям ребер. Эти соединительные элементы могут быть сформированы как компоненты тех или других или как тех, так и других из ребер и/или соединителей ребер, или весь узел соединителя ребер может быть отформован. Примеры соединительных элементов могут включать в себя углубления, ушки, шипы, резьбовые приготовления, сегменты для использования с припоем, оловом или сваркой, крепежами, клеями и/или т.п.
Основание 106 является основанием реберного датчика 102, к которому присоединяются ребра. Основание 106 может ограничивать движение ребер 108a и 108b. В варианте осуществления основание 106 имеет отверстия, через которые ребра 108a и 108b размещаются, при этом ребра 108a и 108b имеют элементы на верхней 153 и нижней 155 сторонах основания 106.
В варианте осуществления основание 106 является согласованным с трубопроводом, так что основание 106 действует как элемент трубопровода со стороной (возможно нижней 155 стороной в показанном варианте осуществления) основания 106, подвергаемой воздействию текучей среды, которая протекает в трубопроводе 110 во время работы.
В варианте осуществления основание 106 моет быть или иметь пластину. В варианте осуществления пластина может быть пластиной, которая имеет толщину (или твердость), которая меньше или больше толщины материала, определяющего стенку трубопровода 110. В варианте осуществления пластина может быть более толстой в некоторых фрагментах пластины и более тонкой в других фрагментах. Например, центр пластины может быть более тонким по сравнению с областями, где пластина присоединяется к трубопроводу, середина пластины относительно поперечной оси 131 может быть более тонкой по сравнению с краями пластины, которые находятся рядом с трубопроводом 110 по поперечной оси 131, середина пластины относительно поперечной оси 131 может быть более толстой по сравнению с краями пластины, которые находятся рядом с трубопроводом 110 по поперечной оси 131, толщина пластины может иметь уклон, который продолжает одно из увеличения или уменьшения, по меньшей мере, от края пластины, который находится рядом с трубопроводом по поперечной оси 131, о середины пластины по поперечной оси 131, или т.п. В варианте осуществления, вместо изменения толщины пластины могут быть изменены материалы, предоставляя возможность для более мягких и более твердых областей пластины. Любое из соотношений в пластине, раскрытых относительно толщины и тонкости, рассматривается относительно твердости и мягкости (возможно посредством изменяющихся материалов), соответственно. Изменяющаяся толщина (или мягкость) в пластине может предоставлять возможность для лучшей результирующей нейтрализации сил по вертикальной оси 151.
Соединитель 116 основания является элементом, который присоединяет основание 106 к окружению, в котором реберный датчик 102 используется. Например, соединитель 116 основания может быть использован для присоединения основания 106 реберного датчика 102 к позиции, в которой необходимо измерять расход, например, к трубопроводу 110. Соединитель 116 основания может присоединять основание 106 к трубопроводу по периферии основания 106. Основание 106 может быть присоединено к соединителю 116 основания любым способом, известным в области техники, например, посредством одного или более из сварки, пайки, клеевого соединения или механической вставки. В варианте осуществления основание 106 может быть сформировано с соединителем 116 основания в качестве объединенного компонента.
Уравновешивающее ребро 118 является элементом, который частично ограничивает изгиб основания 106 в некоторых местоположениях основания 106. Уравновешивающее ребро 118 может быть продолговатым элементом. Уравновешивающее ребро 118 может состоять из материала, который является достаточно жестким, чтобы ограничивать перемещение, такое как вибрационное и/или колебательное перемещение. Уравновешивающее ребро 118 может помогать устранять фактическое движение реберного датчика 102 по вертикальной оси 151 относительно трубопровода 110. Уравновешивающее ребро 118 может быть присоединено к одному или более из основания 106, трубопровода 110 и соединителя 116 основания. В варианте осуществления уравновешивающее ребро 118 присоединяется непосредственно, по меньшей мере, к одному из ребер 108a и 108b, но в других вариантах осуществления уравновешивающее ребро 118 может не быть присоединено к ребрам 108a и 108b. В различных вариантах осуществления уравновешивающее ребро 118 может быть присоединено к основанию 106 во множестве местоположений вдоль основания 106, например, в местоположении вдоль основания, которое, по меньшей мере, включает в себя центр основания 106, местоположение вдоль основания 106, которое представляет часть середины основания 106 по поперечной оси 131 вдоль части оси 141 поток, и/или т.п. В варианте осуществления уравновешивающее ребро 118 может протягиваться или в значительной степени протягиваться на длину основания 106, длина основания 106 возможно является всей длиной основания 106 или длиной основания 106, которая не ограничивается соединителем 116 основания. Соединитель 116 основания может быть присоединен к пластине основания в позиции, которая является равноудаленной от фрагментов ребер, которые выступают через основание 106 вдоль поперечной оси 131. Посредством позиционирования уравновешивающего ребра 118 между выступами ребер, возможно на равном удалении от выступов вдоль поперечной оси 131, уравновешивающее ребро 118 может заставлять ребра вращаться вдоль точки вращения в точках или практически соседних точках на краях основания 106 или на краях основания 106, где основание 106 не ограничивается. Это может заставлять ребра не иметь фактического движения по вертикальной оси 151, и, следовательно, противодействующего движения окружающей конструкции.
В варианте осуществления уравновешивающее ребро 118 может иметь центральную линию 198, представляющую центр наибольшей длины уравновешивающего ребра 118, если уравновешивающее ребро 118 является симметричной по этой длине, относительно центральной линии 198. Хотя изображено на фиг. 1 как штриховая линия, видимая на поверхности, центральная линия находится внутри уравновешивающего ребра 118, возможно в центре массы в каждом поперечном сечении, определенном плоскостями поперечной и вертикальной осей 131 и 151. В варианте осуществления уравновешивающее ребро 118 может быть присоединено к реберному датчику 102, так что центральная линия 198 является параллельной или практически параллельной оси 141 потока. В варианте осуществления уравновешивающее ребро 118 может иметь равномерную толщину вокруг центральной линии 198, вдоль оси 141 потока. В другом варианте осуществления уравновешивающее ребро 118 может иметь переменную толщину вокруг центральной линии 198, вдоль оси 141 потока и/или переменную толщину вдоль самой оси 141 потока по поперечной оси 131. Например, в варианте осуществления, толщина, по меньшей мере, одного наконечника уравновешивающего ребра 196 по поперечной оси 131 вокруг центральной линии 198 может быть больше толщины среднего фрагмента уравновешивающего ребра 197 по поперечной оси 131 вокруг центральной линии 198. В другом осуществления, толщина, по меньшей мере, одного наконечника уравновешивающего ребра 196 по поперечной оси 131 вокруг центральной линии 198 может быть меньше толщины среднего фрагмента уравновешивающего ребра 197 по поперечной оси 131 вокруг центральной линии 198.
Рассматривается вариант осуществления, когда формируется узел уравновешенного основания. Узел уравновешенного основания может включать в себя, по меньшей мере, основание 106 и уравновешивающее ребро 118. В различных вариантах осуществления узел уравновешенного основания может дополнительно включать в себя ребра 108a и 108b. Дополнительно, основание 106 может быть сконфигурировано как изменчивое основание 306, как показано на фиг. 3 и описано в спецификации, в общем. В варианте осуществления этот узел уравновешенного основания может быть компонентом реберного датчика 102.
Преобразователи 104a-c являются элементами, которые возбуждают и/или измеряют движение ребер 108a и 108b. В то время как три преобразователя показаны на чертежах, любое число преобразователей может быть использовано. В варианте осуществления, показанном на фиг. 1, верхний по потоку преобразователь 104a является преобразователем с чувствительным элементом, который измеряет верхние по потоку колебания относительного движения между первым ребром 108a и вторым ребром 108b. В варианте осуществления, показанном на фиг. 1, возбуждающий преобразователь 104b является преобразователем, который действует как возбуждающее устройство и осуществляет вибрацию расположенного в середине выступа и/или сегмента выступа 114a или сегмента выступа 114a первого ребра 108a и расположенного в середине выступа 114b или сегмента выступа 114b второго ребра 108b, среднее местоположение является средним местоположением ребра по оси 141 потока. В других вариантах осуществления возбуждающий преобразователь 104b, действующий как возбуждающее устройство, может возбуждать основание 106 или может возбуждать меньше или больше ребер 108a и 108b. В другом варианте осуществления возбуждающий преобразователь 104b может быть расположен внутри основания 106 и осуществлять вибрацию одного или более из основания 106 и/или, по меньшей мере, одного из ребер 108a и 108b. В варианте осуществления, показанном на фиг. 1, нижний по потоку преобразователь 104c является преобразователем с чувствительным элементом, который измеряет нижние по потоку колебания относительного движения между первым ребром 108a и вторым ребром 108b. Разность фаз или временная задержка могут быть измерены между верхними по потоку и нижними по потоку колебаниями для того, чтобы выводить массовый расход текучей среды, протекающей через и/или вокруг ребер. В другом варианте осуществления командный сигнал от возбуждающего преобразователя 104b может быть использован вместо или в дополнение к измеренной выше по потоку или ниже по потоку вибрационной характеристике, чтобы определять разность фаз. Преобразователи 104a-c могут также быть использованы для возбуждения и получения показателей измерений, которые могут быть использованы с известными способами для определения плотности и/или вязкости. Объединение этих измерений может предоставлять объемный расход. Способы для этих определений являются хорошо известными в области техники.
В варианте осуществления преобразователи 104a-c могут быть присоединены к выступам 114a и 114b ребер. Выступы 114a и 114b ребер могут иметь различные сегменты для присоединения преобразователей. Например, в варианте осуществления каждый из выступов 114a и 114b может иметь три сегмента, сегменты, скажем, имеют взаимодополняющие поверхности, которые противопоставлены друг другу между выступами 114a и 114b ребер. Каждый из выступов 104a-c может быть присоединен к одному из соответствующих сегментов выступов 114a и 114b ребер (соответствующие сегменты возможно обращены друг к другу по поперечной оси 131). В этом варианте осуществления три преобразователя 104a-c могут быть выровнены друг с другом по оси 141 потока (по меньшей мере, когда реберный датчик 102 не работает). В этом варианте осуществления преобразователи 104a-c могут быть присоединены к ребрам 108a и 108b в позициях, находящихся на стороне основания 106, которая противоположна стороне основания 106, которая имеет фрагменты ребер 108a и 108b, которые погружаются.
В различных вариантах осуществления соединители 120a и/или 120b ребер могут соединять ребра 108a и/или 108b на погружной стороне 342 или на внешней стороне 344. Например, в вариантах осуществления, когда соединители ребер соединяют ребра 108a и 108b на внешней стороне посредством соединения выступов 114a и 114b ребер, например, соединяя сегменты, которые представляют выступы 114a и 114b ребер. Соединители 120a и/или 120b ребер могут быть присоединены к ребрам в позициях книзу 155 и/или кверху 153 от областей на ребрах 108a и/или 108b, где один или более преобразователей 104a-c присоединяются. В варианте осуществления соединители 120a и/или 120b ребер присоединяются к ребрам на внешней стороне 344 основания 106 в позиции ближе к основанию 106 по сравнению с местоположением на ребрах 108a и/или 108b, в которых присоединяются преобразователи 104a-c. В варианте осуществления соединители 120a и/или 120b ребер присоединяются к ребрам на внешней стороне 344 основания 106 в позиции ближе к местоположению на ребрах 108a и/или 108b, в которых присоединяются преобразователи 104a-c, по сравнению с основанием 106. В вариантах осуществления, когда соединители 120a и/или 120b ребер присоединяются к ребрам 108a и/или 108b на внешней стороне 344 основания 106, может быть целесообразно, чтобы соединители 120a и/или 120b ребер могли быть вне потока текучей среды и могли уменьшать вероятность влияния соединителей 120a и/или 120b ребер на профиль потока и/или чувствительность к эрозии и/или коррозии. В вариантах осуществления, когда соединители 120a и/или 120b ребер присоединяются к ребрам 108a и/или 108b на внешней стороне 344 основания 106, соединители 120a и/или 120b ребер могут все еще индуцировать расщепление моды и/или могут все еще индуцировать большее завихрение в OOP-моде.
Измерительная электронная аппаратура 112 является набором электрических логических схем, который определяет свойства потока из показаний измерения потока. Измерительная электронная аппаратура 112 не показана на фиг. 1, но конфигурации и способы присоединения для измерительной электронной аппаратуры хорошо известны в области техники. Измерительная электронная аппаратура 112 может иметь логические схемы, представляющие обрабатывающий элемент, логические схемы, представляющие память, логические схемы для передачи и приема данных и коммуникационные соединения для присоединения к датчикам, возбуждающим устройствам, вычислительным устройствам другой измерительной электронной аппаратуре 112 и т.п. Измерительная электронная аппаратура 112 может исполнять, посредством процессора, команды, сохраненные в памяти, для передачи возбуждающих сигналов, приема данных датчиков (например, от преобразователей с чувствительным элементом, таких как верхний по потоку преобразователь 104a и нижний по потоку преобразователь 104c), определения характеристик потока и/или передачи исходных или определенных данных внешним вычислительным устройствам или датчикам, и т.п. Измерительная электронная аппаратура 112 может быть использована для определения и/или передачи данных, представляющих, например, массовые расходы, плотности, объемные расходы и/или т.п. Измерительная электроника 112 может быть сконфигурирована, чтобы возбуждать или передавать инструкции, чтобы возбуждать ребра 108a и 108b с различными частотами, фазами и/или в различных модах с помощью возбуждающего преобразователя 104b. В варианте осуществления измерительная электроника 112 может быть присоединена к основанию 106 или ребрам 108a и 108b и может возможно быть присоединена на внешней стороне 344 основания 106. В другом варианте осуществления измерительная электронная аппаратура 112 может быть устройством, внешним для реберного датчика 102. Измерительная электронная аппаратура 112 может быть вариантом осуществления компьютерной системы 400 на фиг. 4.
В варианте осуществления один, любое сочетание или все электронные элементы могут быть внешними для потока текучей среды и/или могут быть внешними для основания. Электронные элементы могут включать в себя один, любое сочетание или все преобразователи 104a-c и/или измерительную электронную аппаратуру 112.
Ось 141 потока является общим направлением расчетного потока протекающей текучей среды в трубопроводе, ось 141 потока является ортогональной поперечной оси 131 и вертикальной оси 151. В прямом трубопроводе эта ось может быть определена центром внутреннего пространства трубопровода вдоль линии, представляющей поток текучей среды. Направление 143 вверх по потоку определяется как направление вверх по потоку, с которого проточная текучая среда течет, вдоль оси 141 потока. Направление 145 вниз по потоку определяется как направление вниз по потоку, в котором проточная текучая среда течет, вдоль оси 141 потока.
Вертикальная ось 151 является линией, которая делит пополам основание 106 и центральную точку внутреннего поперечного сечения (поперечное сечение имеет тот же внутренний радиус, что и весь трубопровод) трубопровода 110, если трубопровод был присоединен, вертикальная ось 151 является ортогональной оси 141 потока и поперечной оси 131. Направление 153 вверх определяется как направление от центра трубопровода 110 к основанию 106 вдоль вертикальной оси 151. Направление 155 вниз определяется как направление от основания 106 к центру трубопровода 110 вдоль вертикальной оси 151.
Поперечная ось 131 является осью, определенной как параллельная или практически параллельная (если основание искривлено, она может быть параллельна линии, которая представляет среднее расстояние основания 106 от центра трубопровода 110) основанию 106 и ортогональная потоку текучей среды, поперечная ось 131 является ортогональной оси 141 потока и вертикальной оси 151. Первое направление 133 и второе направление 135 являются противоположными направлениями вдоль поперечной оси 131. В показанном варианте осуществления первое направление 133 может быть направлением влево от трубопровода 110, если рассматривается поперечное сечение трубопровода 110, определенное вертикальной осью 151 и поперечной осью 131, с точки обзора, обращенной в направлении 145 вниз по потоку. В то время как направления и оси координат выглядят как привязанные к реберному датчику 102 и потоку через него, следует понимать, что варианты осуществления, раскрытые для конкретных элементов измерителя реберного датчика, когда описываются относительно направлений и осей координат, могут пониматься как независимые элементы с направлением и осями координат просто для демонстрации относительных позиций, соединений, размещений и конфигураций таких элементов в изоляции от реберного датчика 102 и потока через него в целом. Например, если толщина уравновешивающего ребра 118 изменяется вдоль оси потока, изменение может быть лишь относительно самого уравновешивающего ребра 118 на чертежах, а не относительно потока или датчика 102 расхода, в общем. Также, следует понимать, что раскрытые варианты осуществления реберного датчика 102 и его элементов, прежде всего, касаются этих ссылок, представляющих относительные позиции, соединения, размещения и конфигурации в моменты времени, когда реберный датчик 102 не подвергается воздействию потока, например, во время производства или установки.
Фиг. 2A-2C показывают виды в перспективе вариантов осуществления узлов 200a-200c соединителя ребер. Узлы 200a-200c соединителя ребер могут быть вариантами осуществления узлов соединителя ребер, раскрытых в описании для фиг. 1. Следует понимать, что показанные изображения могут не быть в масштабе, и варианты осуществления с различными относительными размерами рассматриваются. В целях ясности система координат с направлениями координатных осей и осями показана для конкретных перспектив на фиг. 2A-2C.
Фиг. 2A показывает вид в перспективе варианта осуществления узла 200a соединителя ребер и стержнеобразных соединителей 220a ребер. Стержнеобразные соединители 220a ребер могут быть вариантами осуществления соединителей (120a и 120b) ребер. В целях этой спецификации, узел соединителя ребер является узлом, в котором, по меньшей мере, одно ребро (108a и/или 108b) присоединяется, по меньшей мере, к одному соединителю (120a и/или 120b) ребер. Стержнеобразный соединитель 220a ребер может быть вариантом осуществления соединителя 120a или 120b ребер.
Фиг. 2B показывает вид в перспективе варианта осуществления узла 200b соединителя ребер и полоскового соединителя 220b ребер. Полосковые соединители 220b ребер могут быть вариантом осуществления соединителей 120a и/или 120b ребер. В альтернативных вариантах осуществления плоский фрагмент полосы может, например, когда не существует потока в трубопроводе, быть параллельным плоскости, определенной поперечной осью 131 и осью 141 потока, быть параллельным плоскости, определенной вертикальной осью 151 и поперечной осью 131, или может быть фрагментом, который скручен спиральным образом. В другом варианте осуществления полосковый соединитель 220b ребер может иметь, по меньшей мере, один сужающийся конец. Например, полосковый соединитель 220b ребер может быть сужен, так что один или более из верхнего по потоку 143 конца и нижнего по потоку 145 конца полоскового соединителя 220b ребер имеет меньшую площадь поперечного сечения в плоскости, определенной вертикальной и поперечной осями 151 и 131, по сравнению с площадью поперечного сечения в плоскости, определенной вертикальной и поперечной осями 151 и 131 более центральной позиции по оси 141 потока полоскового соединителя 220b. Например, поперечное сечение в плоскости, определенной вертикальной и поточной осями 151 и 141 полоскового соединителя 220b ребер, может быть уже по вертикальной оси 151 на одном или более из верхнего по потоку и нижнего по потоку 143 и 145 концов поперечного сечения по сравнению, по меньшей мере, с одним более центральным фрагментом по оси 141 потока поперечного сечения.
Фиг. 2C показывает вид в перспективе варианта осуществления узла 200c соединителя ребер с имеющим форму распорной штанги соединителем 220c ребер. Имеющий форму распорной штанги соединитель 220c ребер может быть вариантом осуществления соединителя 120a или 120b ребер. Изгибы 204c имеющего форму распорной штанги соединителя 220c ребер могут быть такими, что имеющий форму распорной штанги соединитель 220c ребер присоединяется между различными позициями или одинаковыми позициями соответствующих поверхностей ребер 108a и 108b. Например, имеющий форму распорной штанги соединитель 220c ребер может быть одним или более из присоединенного к позиции на первом ребре 108a, которая находится кверху 153 от позиции на соответствующей поверхности второго ребра 108b, к которому тот же имеющий форму распорной штанги соединитель 220c ребер может быть присоединен, присоединенного к позиции на первом ребре 108a, которая находится кверху 143 от позиции на соответствующей поверхности второго ребра 108b, к которой тот же имеющий форму распорной штанги соединитель 220c ребер может быть присоединен, и/или т.п.
В вариантах осуществления, выраженных на фиг. 2A-2C, следует понимать, что любой из соединителей 120a и/или 120b ребер, независимо от формы или структуры, может быть присоединен к каждому из ребер 108a и/или 108b в любой позиции или способом, раскрытым в этой спецификации.
Фиг. 3 является видом в поперечном сечении варианта осуществления системы 300 датчика расхода с реберным датчиком 302, имеющим изменчивое основание 306 в узле уравновешенного основания. Поперечное сечение из вида поперечного сечения является поперечным сечением в плоскости, определенной вертикальной осью 151 и поперечной осью 131. Система 300 датчика расхода может иметь реберный датчик 302 с изменчивым основанием 306, первым ребром 308a, вторым ребром 308b, погружной стороной 342 и внешней стороной 344. Система 300 датчика расхода, реберный датчик 302, изменчивое основание 306, первое ребро 308a и второе ребро 308b могут быть вариантами осуществления системы 100 реберного датчика, реберного датчика 102, основания 106, первого ребра 108a и второго ребра 108b на фиг. 1, соответственно. Изменчивое основание 306 может иметь первый более твердый фрагмент 310, второй более твердый фрагмент 312 и более мягкий фрагмент 314. Направления координат и осей показаны согласно виду на фиг. 3. Следует понимать, что показанные изображения могут не быть в масштабе, и варианты осуществления с различными относительными размерами рассматриваются.
В показанном варианте осуществления более мягкий фрагмент 314 находится в середине изменчивого основания 306 (середине изменчивого основания 306 по поперечной оси 131), а первый и второй более твердые фрагменты 310 и 312 изменчивого основания 306 на сторонах изменчивого основания 306 ближе к тому, где изменчивое основание 306 присоединяется к трубопроводу. Может быть понятно, что, в различных вариантах осуществления, переход между более мягким фрагментом 314 и более твердыми фрагментами 310 и 312 может быть плавным с точки зрения увеличения жесткости от середины изменчивого основания 306 до каждого из краев на каждой из первой и второй сторон изменчивого основания 306, или переход может происходить ступенчато с увеличением жесткости в блоках от середины изменчивого основания 306 до каждого из краев на каждой из первой и второй сторон изменчивого основания. В варианте осуществления разница в мягкости и жесткости может быть обеспечена посредством создания более мягких фрагментов более тонкими, а более твердых фрагментов более толстыми, возможно посредством выреза фрагмента основания 106 или формирования основания 106 как изменчивого основания 306 с изменяющейся толщиной. В другом варианте осуществления мягкость и твердость могут изменяться посредством использования различных материалов или сплавов по поперечной оси 131, которые являются более твердыми в более твердых фрагментах 310 и 312 и более мягкими в более мягком фрагменте 314. Уравновешивающее ребро 118 может быть присоединено к изменчивому основанию 306 в середине поперечной оси 131 изменчивого основания 306, длина уравновешивающего ребра 118 вдоль или практически вдоль оси 141 потока (не видна на этом чертеже в плоскости, представляющей поперечную и вертикальные оси 131 и 151).
Как изображено, с уравновешивающим ребром 118, присоединенным к изменчивому основанию 306, более мягкий фрагмент 314 может представлять области вокруг уравновешивающего ребра 118. Может быть понятно, что, в отсутствие уравновешивающего ребра 118, 314, не будет необходимым представлять отдельные более мягкие участки, как изображено (уравновешивающее ребро 118 может добавлять жесткость, когда присоединено к датчику 302). В варианте осуществления фрагмент изменчивого основания 306 между двумя ребрами 108a и 108b (вдоль поперечной оси 131) может быть мягче фрагментов изменчивого основания 306 между каждым из ребер 108a и 108b и краями изменчивого основания 306 (по поперечной оси 131). В варианте осуществления более мягкий фрагмент 314 и более твердые фрагменты 310 и 312 могут быть сформированы посредством присоединения, по меньшей мере, одного из ребер 108a и 108b ближе по поперечной оси 131 к краю изменчивого основания 306 по сравнению с уравновешивающим ребром 118.
Рассматриваются варианты осуществления, в которых изменчивое основание 306 не имеет уравновешивающего ребра 118, и варианты осуществления, в которых реберный датчик 102 имеет уравновешивающее ребро 118 без изменчивого основания 306. Например, вариант осуществления может иметь основание 106 с единообразными свойствами в изоляции, так что толщина и материал согласуются (с любой изменчивостью в пластине благодаря присоединению к окружению, такому как трубопровод 110), и может все еще иметь уравновешивающее ребро 118. В этом варианте осуществления основание 106 может быть единообразной, тонкой пластиной.
В варианте осуществления основание 106 является практически плоским элементом с тонким краем относительно площади поверхности двух противоположных поверхностей. Одна из двух поверхностей может быть характеризована как поверхность погружной стороны 342, а сторона, которая противостоит поверхности погружной стороны 342, может называться поверхностью 344 внешней стороны. Погружная сторона 342 представляет сторону основания 106, на которой фрагменты ребер 108a и 108b и/или основание 106 подвергаются воздействию протекающей текучей среды, которая должна быть измерена. Внешняя сторона 344 представляет сторону основания 106, на которой выступы 114a и 114b ребер могут быть расположены и, возможно, присоединены к преобразователям.
В варианте осуществления выступы 114a и 114b ребер могут иметь сегменты, сегменты, возможно, каждый, выступают через отверстия в основании 106, когда реберный датчик 302 собран. В варианте осуществления преобразователи 104a-c могут быть присоединены к выступам 114a и 114b ребер. Выступы 114a и 114b ребер могут иметь различные сегменты для присоединения преобразователей. Например, в варианте осуществления каждый из выступов 114a и 114b может иметь три сегмента, сегменты, скажем, имеют взаимодополняющие поверхности, которые противопоставлены друг другу между выступами 114a и 114b ребер. Каждый из выступов 104a-c может быть присоединен к одному из соответствующих сегментов выступов 114a и 114b ребер (соответствующие сегменты возможно обращены друг к другу по поперечной оси 131). В этом варианте осуществления три преобразователя 104a-c могут быть выровнены друг с другом по оси 141 потока (по меньшей мере, когда реберный датчик 102 не работает). В этом варианте осуществления преобразователи 104a-c могут быть присоединены к ребрам 108a и 108b в позициях, находящихся на внешней стороне 344 основания 106.
Фиг. 4 показывает блок-схему варианта осуществления компьютерной системы 400. В варианте осуществления компьютерная система 400 может быть измерительной электроникой, например, измерительной электроникой 112. В различных вариантов осуществления компьютерная система 400 может состоять из специализированных интегральных схем или может иметь дискретные элементы процессора и памяти, процессорные элементы для обработки команд из и сохранения данных в элементах памяти. Компьютерная система 400 может быть изолированной физической системой, виртуальной машиной и/или может быть установлена в облачном вычислительном окружении.
Компьютерная система может иметь процессор 410, память 420, ввод/вывод 430 и коммуникационное соединяющее устройство 440. Память 420 может хранить и/или может иметь интегральные схемы, представляющие, например, модуль 422 возбуждения, сигнальный модуль 424 и модуль 426 обработки. В различных вариантах осуществления компьютерная система 400 может иметь другие компьютерные элементы, объединенные в сформулированные элементы или в дополнение к или на связи со сформулированными компьютерными элементами, например, шинами, другими протоколами связи и т.п.
Процессор 410 является элементом обработки данных. Процессор 410 может быть любым элементом, используемым для обработки, таким как центральный процессор, специализированная интегральная схема, другая интегральная схема, аналоговый контроллер, графический процессор, программируемая пользователем вентильная матрица, любое сочетание этих или других широко распространенных обрабатывающих элементов и/или т.п. Процессор 410 может иметь кэш-память для хранения данных обработки. Процессор 410 может извлекать пользу из способов в этой спецификации, поскольку способы могут улучшать разрешение вычислений и уменьшать погрешность таких вычислений с помощью представленных изобретенных структур.
Память 420 является устройством для электронного хранилища. Память 420 может быть любым долговременным носителем хранения и может включать в себя один, некоторые или все из накопителя на жестком диске, твердотельного накопителя, энергозависимой памяти, интегральных схем, программируемой пользователем вентильной матрицы, оперативного запоминающего устройства, постоянного запоминающего устройства, динамического оперативного запоминающего устройства, стираемого программируемого постоянного запоминающего устройства, электрически стираемого программируемого постоянного запоминающего устройства, кэш-памяти и/или т.п. Процессор 410 может исполнять команды из и использовать данные, сохраненные в памяти 420.
Компьютерная система 400 может быть сконфигурирована, чтобы хранить любые данные, которые будут использованы модулем 422 возбуждения, сигнальным модулем 424 и/или модулем 426 обработки, и может сохранять исторические данные в течение любого интервала времени, представляющие какой-либо параметр, принятый или использованный модулем 422 возбуждения, сигнальным модулем 424 и/или модулем 426 обработки, 420. Компьютерная система 400 может также сохранять какие-либо данные, которые представляют определения каких-либо промежуточных форм в памяти 420, возможно с временными отметками, представляющими то, когда данные были получены или определены. В то время как модуль 422 возбуждения, сигнальный модуль 424 и модуль 426 обработки показаны как три отдельных и дискретных модуля, спецификация рассматривает любое число (даже один или три, как указано) и множество модулей, работающих совместно, чтобы выполнять способы, выраженные в этой спецификации.
Модуль 422 возбуждения является модулем, который передает сигнал возбуждающего устройства преобразователю (например, возбуждающему преобразователю 104b на фиг. 1), чтобы осуществлять вибрацию элементов узла датчика. Модуль 422 возбуждающего устройства может быть сконфигурирован, чтобы передавать данные, представляющие команды для возбуждения во множестве различных мод. Например, модуль 422 возбуждения может быть сконфигурирован, чтобы передавать данные, представляющие команды для возбуждения в IP-модах и/или OOP-модах.
Сигнальный модуль 424 является модулем, который принимает данные датчика, например, данные, представляющие разности фаз, временные задержки и/или частотные характеристики. В реберном датчике 102, сигнальный модуль 424 может принимать данные о частоте от верхнего по потоку преобразователя 104a и нижнего по потоку преобразователя 104c. Определение разности фаз или временной задержки между частотами представляется посредством данных о частоте верхнего по потоку преобразователя 104a и нижнего по потоку преобразователя 104c.
Модуль 426 обработки является модулем, который определяет режим работы реберного датчика 102 и/или выводит данные, относящиеся к реберному датчику 102. Модуль 426 обработки может определять характеристики потока из данных, принятых посредством сигнального модуля 424. Например, модуль 426 обработки может использовать данные о разности фаз или временной задержке, чтобы вычислять массовый расход протекающей текучей среды с помощью способов, известных в области техники. В варианте осуществления модуль 426 обработки может использовать сигнал возбуждения от модуля 422 возбуждения в качестве сигнала, из которого получается временная задержка или разность фаз (когда сравнивается с другим сигналом преобразователя). Модуль 426 обработки может также получать плотность протекающей текучей среды из данных о частоте, принятых посредством сигнального модуля 424. Модуль 426 обработки может также получать вязкость протекающей текучей среды из данных о частоте и/или фазе, принятых посредством сигнального модуля 424.
Модуль 426 обработки может дополнительно быть сконфигурирован, чтобы определять моды и/или частоты, с которыми необходимо возбуждать возбуждающее устройство, возможно посредством возбуждения замкнутого или разомкнутого контура обратной связи, чтобы добиваться одного или более из желаемой частоты или разности фаз. При определении информационной команды, представляющей моду возбуждения, которая должна быть возбуждена, модуль 426 обработки может передавать эту команду модулю 422 возбуждения, чтобы передавать команды для возбуждения схемы возбуждающего устройства, например, возбуждения возбуждающего преобразователя 104b.
Возможности модуля 422 возбуждения, сигнального модуля 424 и модуля 426 обработки рассматриваются относительно и отражают способы, которые выполняются в представленных блок-схемах последовательности операций. Все способы в этой спецификации рассматриваются относительно каждой блок-схемы последовательности операций и описания блок-схемы последовательности операций, и все способы и возможности модуля 422 возбуждения, сигнального модуля 424 и модуля 426 обработки рассматриваются в целях любых пунктов формулы изобретения для способа, которые следуют за этим описанием, в представленных порядках этапов и любом другом порядке, который будет целесообразным для обычного специалиста в области техники в контексте этой спецификации.
Ввод/вывод 430 является устройством, используемым для коммуникационного соединения компьютерной системы 400 с внешними элементами. Ввод/вывод 430 приспособлен для присоединения компьютерной системы 400 к внешним элементам, с помощью известных технологий, например, универсальной последовательной шины, ProLink последовательного соединения, последовательных соединений усовершенствованной технологии, и/или т.п. Ввод/вывод 430 может иметь коммуникационное соединительное устройство 440. Коммуникационное соединительное устройство 440 используется для соединения компьютерной системы 400 с компонентами, внешними для компьютерной системы 400, например, с внешними вычислительными устройствами, датчиками, преобразователями (например, преобразователями 104a-c), другими узлами датчиков и/или т.п.
Блок-схемы последовательности операций
Фиг. 5-9 показывают блок-схемы последовательности операций вариантов осуществления способов для создания и использования вариантов осуществления узлов соединителя ребер, узлов уравновешенного основания и объединенных узлов соединителя ребер и уравновешенного основания. Способы, раскрытые в блок-схемах последовательности операций, не являются исчерпывающими, а просто демонстрируют потенциальные варианты осуществления этапов и порядков. Способы должны истолковываться в контексте всей спецификации, включающей в себя элементы, раскрытые в описаниях на фиг. 1-4, включающие в себя, например, основание 106 (например, изменчивое основание 306), ребра 108a и 108b, уравновешивающее ребро 118 и соединители 120a и 120b ребер.
Фиг. 5 показывает блок-схему последовательности операций варианта осуществления способа 500 для использования узла соединителя ребер реберного датчика 102. Этапы способа для способа 500 представлены с вариантами осуществления, которые включают в себя ссылки на элементы, представленные на других чертежах и в описаниях других чертежей. Все возможности, структуры, относительные соединения и позиционирования этих элементов, раскрытые на других чертежах и в описаниях других чертежей, рассматриваются в целях исполнения этих этапов.
Этап 502 является определением, посредством модуля 426 обработки, данных, представляющих первую вибрацию, которая должна возбуждаться посредством возбуждающего преобразователя 104b. В варианте осуществления первое возбуждение, которое должно возбуждаться посредством возбуждающего преобразователя 104b, может быть одной или более из IP-моды и OOP-моды. В варианте осуществления несинфазная мода является модой с разделением между частотой вибрации ребер 108a и 108b на 180º. Модуль 426 обработки может, сам, передавать данные, представляющие первую вибрацию, возбуждающему устройству (например, возбуждающему преобразователю 104b), или передача может быть проведена посредством модуля 422 возбуждения.
Этап 504 является вибрацией, посредством возбуждающего преобразователя 104b, на основе данных, представляющих первую вибрацию, которая должна быть возбуждена.
Этап 506 является, по меньшей мере, частичным ограничением, посредством, по меньшей мере, одного соединителя 120a и/или 120b ребер, который соединяет первое ребро 108a со вторым ребром 108b, движения первого ребра 108a относительно второго ребра 108b. В варианте осуществления, по меньшей мере, частичное ограничение может ограничивать движение свободного края 199 первого ребра 108a относительно движения свободного края 199 второго ребра 108b. В варианте осуществления, по меньшей мере, частичное ограничение включает в себя ограничение движения первого ребра 108a в каком-либо месте, в котором, по меньшей мере, один соединитель 120a и/или 120b ребер присоединяется к первому ребру, относительно движения второго ребра 108b. В одном варианте осуществления, по меньшей мере, один соединитель 120a и/или 120b ребер не ограничивает непосредственно перемещение какого-либо элемента основания 106, по меньшей мере, один соединитель 120a и/или 120b ребер не присоединяется к элементу основания 106. В варианте осуществления, по меньшей мере, один соединитель 120a и/или 120b ребер не ограничивает непосредственно перемещение какого-либо элемента преобразователей 104a-c, по меньшей мере, один соединитель 120a и/или 120b ребер не присоединяется к элементу преобразователей 104a-c. Все способы соединения, структуры и альтернативные компоновки ребер 108a и 108b и соединителей 120a и 120b ребер рассматриваются для этого этапа.
Этап 508, необязательно, является приемом, посредством сигнального модуля 424 или модуля 426 обработки, данных, представляющих, по меньшей мере, один сигнал датчика. В варианте осуществления, когда сигнальный модуль 424 принимает данные, представляющие, по меньшей мере, один сигнал датчика, сигнальный модуль 424 может передавать эту информацию или обрабатывать выходные данные, полученные из данных, представляющих, по меньшей мере, один сигнал от сигнального модуля, в модуль 426 обработки.
Этап 510 является, необязательно, определением, посредством модуля 426 обработки свойства протекающей текучей среды, например, массового расхода и/или плотности.
В варианте осуществления каждый из этапов способа, показанного на фиг. 5, является отдельным этапом. В другом варианте осуществления, хотя изображены как отдельные этапы на фиг. 5, этапы 502-512 могут не быть отдельными этапами. В других вариантах осуществления способ, показанный на фиг. 5, может не иметь все из вышеописанных этапов и/или может иметь другие этапы в дополнение к или вместо этапов, перечисленных выше. Этапы способа, показанного на фиг. 5, могут быть выполнены в другом порядке. Подмножества этапов, перечисленных выше как часть способа, показанного на фиг. 5, могут быть использованы, чтобы формировать свой собственный способ. Этапы способа 500 могут быть повторены в любом сочетании и порядке любое число раз, например, непрерывно в цикле для того, чтобы поддерживать контроль.
Фиг. 6 показывает блок-схему последовательности операций варианта осуществления способа 600 для использования узла уравновешенного основания реберного датчика 102. Этапы способа для способа 600 представлены с вариантами осуществления, которые включают в себя ссылки на элементы, представленные на других чертежах и в описаниях других чертежей. Все возможности, структуры, относительные соединения и позиционирования этих элементов, раскрытые на других чертежах и в описаниях других чертежей, рассматриваются в целях исполнения этих этапов.
Этап 602 является возбуждением, посредством возбуждающего преобразователя 104b, движения в ребрах 108a и 108b.
Этап 604 является ограничением, посредством уравновешивающего ребра 118, движения основания 106 в ответ на возбуждение. В варианте осуществления уравновешивающее ребро 118 может ограничивать движение основания 106 вдоль фрагмента в или практически в середине основания 106, середина определена как середина поперечной оси 131. Этап 604 может приводить в результате к движению ребер 108a и 108b, не формирующему фактическое перемещение в направлении от центра трубопровода, через середину узла датчика, обеспечивая равновесие и отсутствие движения узла датчика относительно поддерживающей конструкции, к которой реберный датчик 102 присоединяется. В варианте осуществления это может не обеспечивать фактическое движение ребер 108a и/или 108b и/или реберного датчика 102 в направлении от центра трубопровода через середину основания 106, возможно определенном вдоль вертикальной оси 151. Может быть понятно, что, в некоторых вариантах осуществления, ребра 108a и 108b реберного датчика 102 могут вращаться вокруг соответствующих центральных точек ребер 108a и 108b. В варианте осуществления уравновешивающее ребро 118, по меньшей мере, частично ограничивает движение основания 106 по вертикальной оси 151 вдоль среднего фрагмента основания 106, средний фрагмент является фрагментом, определенным серединой поперечной оси 131. В варианте осуществления уравновешивающее ребро 118, по меньшей мере, частично ограничивает основание 106 в позиции между позицией на основании 106, в которой первое ребро 108a присоединяется или должно быть присоединено, и другой позицией на основании 106, в которой второе ребро 108 присоединяется или должно быть присоединено, на поперечной оси 131. В варианте осуществления уравновешивающее ребро 118 может, по меньшей мере, частично ограничивать движение основания 106 в позиции, равноудаленной от позиции первого ребра 108a и другой позиции второго ребра 108b на поперечной оси 131. В варианте осуществления уравновешивающее ребро 118 может, по меньшей мере, частично ограничивать движение основания 106, по меньшей мере, вдоль линейного фрагмента основания 106, который является параллельным оси 141 потока. В варианте осуществления, уравновешивающее ребро 118 может, по меньшей мере, частично ограничивать движение основания 106, так что перемещение одного или более из нижнего по потоку 145 конца основания 106 и верхнего по потоку 143 конца основания 106 ограничивается меньше середины основания 106, середина основания 106 является серединой основания 106 по оси 141 потока. Альтернативно, уравновешивающее ребро 118 может, по меньшей мере, частично ограничивать движение основания 106, так что перемещение одного или более из нижнего по потоку 145 конца основания 106 и верхнего по потоку 143 конца основания 106 ограничивается больше середины основания 106, середина основания 106 является серединой основания 106 по оси 141 потока.
В варианте осуществления каждый из этапов способа, показанного на фиг. 6, является отдельным этапом. В другом варианте осуществления, хотя изображены как отдельные этапы на фиг. 6, этапы 602-604 могут не быть отдельными этапами. В других вариантах осуществления способ, показанный на фиг. 6, может не иметь все из вышеописанных этапов и/или может иметь другие этапы в дополнение к или вместо этапов, перечисленных выше. Этапы способа, показанного на фиг. 6, могут быть выполнены в другом порядке. Подмножества этапов, перечисленных выше как часть способа, показанного на фиг. 6, могут быть использованы, чтобы формировать свой собственный способ. Этапы способа 600 могут быть повторены в любом сочетании и порядке любое число раз, например, непрерывно в цикле для того, чтобы поддерживать контроль.
Фиг. 7 показывает блок-схему последовательности операций варианта осуществления способа 700 изготовления узла соединителя ребер реберного датчика 102. Этапы способа для способа 700 представлены с вариантами осуществления, которые включают в себя ссылки на элементы, представленные на других чертежах и в описаниях других чертежей. Все возможности, структуры, относительные соединения и позиционирования этих элементов, раскрытые на других чертежах и в описаниях других чертежей, рассматриваются в целях исполнения этих этапов. В варианте осуществления узел соединителя ребер может быть объединен с основанием 106 (например, изменчивым основанием 306) и/или уравновешивающим ребром 118, чтобы создавать объединенный узел уравновешенного основания и соединителя ребер. В варианте осуществления узел соединителя ребер может быть компонентом реберного датчика 102.
Этап 702 является, необязательно, формированием первого и второго ребра 108a и 108b. Способы производства, используемые для формирования этих компонентов, могут быть любыми подходящими технологиями производства, известными в области техники, например, формованием, экструзией и другими способами, и/или любым их сочетанием. Соединители ребер могут быть сформированы, например, из металла или композита и могут быть сформированы, например, посредством аддитивного (3D-печать) производства, механической обработки из твердотельного блока, механической обработки частями и сборки с помощью любого или любого сочетания крепежей, клея, сварных деталей, припоев и/или т.п.
Этап 704 является формированием, по меньшей мере, одного соединителя ребер (например, первого и второго соединителей 120a и/или 120b ребер). Способы производства для изготовления элементов, таких как соединитель ребер, являются хорошо известными в области техники, например, формование, экструзия и другие способы. Соединители ребер могут быть сформированы, например, из металла, пластика или другого композита. По меньшей мере, один соединитель ребер может быть сформирован во множестве форм, например, как стержни, полосы или уравновешивающие штанги. В варианте осуществления, по меньшей мере, один соединитель ребер может быть сформирован с ребрами 108a и 108b как единая часть, сводя к нулю необходимость в отдельном этапе формирования ребер 108a и 108b (как на этапе 702) и/или отдельном этапе присоединения, по меньшей мере, одного соединителя ребер к ребрам 108a и 108b. В варианте осуществления, по меньшей мере, один соединитель ребер может быть сформирован с одним или более соединительными элементами, сконфигурированными, чтобы более легко и/или более эффективно присоединять, по меньшей мере, один соединитель ребер к ребрам 108a и 108b, например, один или более наконечников, по меньшей мере, одного соединителя ребер. В другом варианте осуществления одно или более ребер 108a и 108b могут быть сформированы с соединительными элементами, чтобы более легко и/или более эффективно присоединять, по меньшей мере, один соединитель ребер к ребрам 108a и 108b. В еще одном варианте осуществления, по меньшей мере, один соединитель ребер и ребра 108a и 108b могут, каждое, иметь соответствующие или взаимодополняющие соединительные элементы для присоединения, по меньшей мере, одного соединителя ребер к ребрам 108a и 108b. В варианте осуществления, по меньшей мере, один соединитель ребер может быть двумя, тремя, четырьмя, пятью, шестью или любым другим числом соединителей ребер. В варианте осуществления одно или более, по меньшей мере, из одного ребра 108a и/или 108b и, по меньшей мере, одного соединителя 120a и/или 120b ребер может быть сформировано с соединительным элементом, сконфигурированным, чтобы обеспечивать соединение между, по меньшей мере, одним ребром 108a и/или 108b и, по меньшей мере, одним соединителем 120a и/или 120b ребер.
Этап 706 является присоединением, по меньшей мере, одного соединителя ребер к первому и второму ребру 108a и 108b. В вариантах осуществления, в которых одно или более ребер 108a и 108b и, по меньшей мере, один соединитель ребер имеют соединительные элементы, по меньшей мере, один соединитель ребер и ребра 108a и 108b могут быть соединены в/или посредством соединительных элементов. Любой способ присоединения рассматривается, например, сварка, пайка твердым припоем, 3D-печать, низкотемпературная пайка, клеевое соединение, формование пластика или отливка, сопрягаемые физические или механические соединители (например, винты), вставка в углубления и/или т.п. В варианте осуществления соединитель 120a ребер присоединяется к ребру 108a в позиции ближе к свободному краю 199 ребра 108a по сравнению с краем ребра 108a, который присоединяется или должен присоединятся к основанию 106. В варианте осуществления два соединителя 120a и 120b ребер присоединяются к ребрам 108a и 108b. В этом варианте осуществления первый соединитель 120a ребер может быть присоединен, по меньшей мере, к одной позиции, которая находится или будет находиться в другой точке вдоль оси 141 потока, по меньшей мере, для одной позиции, в которой второй соединитель 120b ребер может быть присоединен.
Этап 708 является, необязательно, конфигурированием, измерительной электронной аппаратуры 112, чтобы хранить и/или выполнять один или более из модуля 422 возбуждения, сигнального модуля 424 и/или модуля 426 обработки.
Этап 710 является необязательно, присоединением ребер 108a и 108b к основанию 106. В варианте осуществления ребра 108a и 108b выступают через отверстия в основании 106, так что ребра 108a и 108b имеют погруженные фрагменты, сконфигурированные для погружения в поток текучей среды, и выступы 114a и 114b ребер, которые выступают со стороны основания 106, которая противостоит погруженным фрагментам.
В варианте осуществления каждый из этапов способа, показанного на фиг. 7, является отдельным этапом. В другом варианте осуществления, хотя изображены как отдельные этапы на фиг. 7, этапы 702-710 могут не быть отдельными этапами. В других вариантах осуществления способ, показанный на фиг. 7, может не иметь все из вышеописанных этапов и/или может иметь другие этапы в дополнение к или вместо этапов, перечисленных выше. Этапы способа, показанного на фиг. 7, могут быть выполнены в другом порядке. Подмножества этапов, перечисленных выше как часть способа, показанного на фиг. 7, могут быть использованы, чтобы формировать свой собственный способ. Этапы способа 700 могут быть повторены в любом сочетании и порядке любое число раз, например, непрерывно в цикле для того, чтобы поддерживать контроль.
Фиг. 8 показывает блок-схему последовательности операций варианта осуществления способа 800 изготовления узла уравновешенного основания реберного датчика 102. Этапы способа для способа 800 представлены с вариантами осуществления, которые включают в себя ссылки на элементы, представленные на других чертежах и в описаниях других чертежей. Все возможности, структуры, относительные соединения и позиционирования этих элементов, раскрытые на других чертежах и в описаниях других чертежей, рассматриваются в целях исполнения этих этапов. В варианте осуществления узел уравновешенного основания может быть выполнен с одним или более соединителями 120a и/или 120b ребер для того, чтобы создавать объединенный узел уравновешенного основания и соединителя ребер. В варианте осуществления узел уравновешенного основания может быть компонентом реберного датчика 102.
Этап 802 является, необязательно, формированием преобразователей 104a-c, первого и второго ребра 108a и 108b, измерительной электронной аппаратуры 112, уравновешивающего ребра 118, соединителя 116 основания и первого и второго соединителя 120a и 120b ребер. Способы производства, используемые для формирования этих компонентов, являются устоявшимися в области техники, например, 3D-печать, формование, соединение отдельно сформированных компонентов и/или т.п.
Этап 804 является формированием, по меньшей мере, одного основания 106. Основание 106 может быть плоским или практически плоским элементом с небольшой толщиной относительно площади своих более крупных поверхностей. В варианте осуществления основание 106 может быть сформировано как тонкое и/или может быть сформировано с изменяющейся или единообразной твердостью. Например, основание 106 может быть сформировано как изменчивое основание 306, так что середина изменчивого основания 306 (являющаяся серединой поперечной оси 131) является менее твердой по сравнению с краями (изменчивого основания 306 по поперечной оси 131). Это изменение может быть осуществлено посредством формирования основания 106 путем формования, так что оно создает изменчивое основание 306 с серединой (по поперечной оси 131), являющейся более тонкой (имеющей меньше материала) по сравнению с краями (изменчивое основание 306 по поперечной оси 131). В другом варианте осуществления изменение может быть осуществлено посредством удаления, возможно путем отрезания фрагментов основания 106, чтобы делать основание 106 изменчивым основанием с серединой (вдоль поперечной оси 131), являющейся более тонкой (имеющей меньше материала) по сравнению с краями (изменчивого основания 306 по поперечной оси 131). В другом варианте осуществления основание 106 может состоять из различных материалов вдоль поперечной оси 131, делающих основание изменчивым основанием 306, так что середина изменчивого основания 306 (вдоль поперечной оси 131) является более мягкой по сравнению с краями (изменчивого основания 306 по поперечной оси 131).
Этап 806 является формированием уравновешивающего ребра 118. Уравновешивающее ребро 118 может быть вытянутым элементом и может быть изготовлено с помощью любых стандартных способов производства, и из любых материалов, известных в области техники, которые являются достаточными, чтобы, по меньшей мере, ограничивать, до некоторой степени, движение основания 106. В варианте осуществления уравновешивающее ребро 118 может иметь центральную линию 198, представляющую центр наибольшей длины уравновешивающего ребра 118, если уравновешивающее ребро 118 является симметричным по этой длине, по меньшей мере, по одной оси, например, симметричным по поперечной оси 131 относительно центральной линии 198. Уравновешивающее ребро 118 может иметь изменяющуюся толщину вокруг центральной линии 198 по длине центральной линии 198. Например, в варианте осуществления, толщина, по меньшей мере, одного наконечника уравновешивающего ребра 118 по поперечной оси 131 относительно центральной линии 198 может быть больше толщины среднего фрагмента уравновешивающего ребра 197 по поперечной оси 131 относительно центральной линии 198. В другом осуществления, толщина, по меньшей мере, одного наконечника уравновешивающего ребра 118 по поперечной оси 131 вокруг центральной линии 198 может быть меньше толщины среднего фрагмента уравновешивающего ребра 197 по поперечной оси 131 вокруг центральной линии 198.
Этап 808 является присоединением уравновешивающего ребра 118 к основанию 106. Уравновешивающее ребро 118 может быть присоединено к основанию в средней позиции основания по поперечной оси 131, возможно с вытянутым фрагментом вдоль или практически вдоль оси 141 потока. В варианте осуществления, в котором основание 106 имеет ребра 108a и 108b, присоединенные к основанию 106, или будет иметь ребра 108a и 108b, присоединенные к основанию 106, уравновешивающее ребро 118 может быть присоединено к основанию 106 между присоединенными ребрами 108a и 108b, возможно присоединено между ребрами 108a и 108b вдоль поперечной оси 131, а также возможно присоединено равноудаленно от позиции для присоединения или присоединенной к первому ребру 108a и другой позиции для присоединения или присоединенной ко второму ребру 108b вдоль поперечной оси 131. Узел, сформированный, когда уравновешивающее ребро 118 присоединяется к основанию 106 (или изменчивому основанию 306), может считаться узлом уравновешенного основания реберного датчика 102. В варианте осуществления уравновешивающее ребро 118 может быть присоединено к реберному датчику 102, так что центральная линия 198 является параллельной или практически параллельной оси 141 потока. В варианте осуществления уравновешивающее ребро 118 может иметь равномерную толщину относительно центральной линии 198, вдоль оси 141 потока. В другом варианте осуществления уравновешивающее ребро 118 может иметь изменяющуюся толщину вдоль оси 141 потока, вокруг центральной линии 198 по поперечной оси 131. Например, в варианте осуществления, толщина, по меньшей мере, одного наконечника уравновешивающего ребра 118 по поперечной оси 131 относительно центральной линии 198 может быть больше толщины среднего фрагмента уравновешивающего ребра 197 по поперечной оси 131 относительно центральной линии 198. Например, в варианте осуществления, толщина, по меньшей мере, одного наконечника уравновешивающего ребра 118 по поперечной оси 131 относительно центральной линии 198 может быть меньше толщины среднего фрагмента уравновешивающего ребра 197 по поперечной оси 131 относительно центральной линии 198.
Этап 810 является необязательным формированием реберного датчика 102 посредством присоединения узла уравновешенного основания к ребрам 108a и 108b (возможно с уравновешивающим ребром 118 между ребрами 108a и 108b на основании 106), преобразователям 104a-c, измерительной электронной аппаратуре 112, соединителю 116 основания и/или первому и второму соединителям 120a и 120b ребер. В варианте осуществления выступы 114a и 114b ребер могут иметь сегменты, сегменты, возможно, каждый, выступают через отверстия в основании 106, когда реберный датчик 302 собран. В варианте осуществления преобразователи 104a-c могут быть присоединены к выступам 114a и 114b ребер. Выступы 114a и 114b ребер могут иметь различные сегменты для присоединения преобразователей. Например, в варианте осуществления каждый из выступов 114a и 114b ребер может иметь три сегмента, сегменты, скажем, имеют взаимодополняющие поверхности, которые противопоставлены друг другу между выступами 114a и 114b ребер. Каждый из выступов 104a-c может быть присоединен к одному из соответствующих сегментов выступов 114a и 114b ребер (соответствующие сегменты возможно обращены друг к другу по поперечной оси 131). В этом варианте осуществления три преобразователя 104a-c могут быть выровнены друг с другом по оси 141 потока (по меньшей мере, когда реберный датчик 102 не работает). В этом варианте осуществления преобразователи 104a-c могут быть присоединены к ребрам 108a и 108b в позициях, находящихся на стороне основания 106, которая противоположна стороне основания 106, которая имеет фрагменты ребер 108a и 108b, которые погружаются. Измерительная электронная аппаратура 112 может быть присоединена к основанию 106 или ребрам 108a и 108b и может возможно быть присоединена на внешней стороне 344 основания 106.
В варианте осуществления каждый из этапов способа, показанного на фиг. 8, является отдельным этапом. В другом варианте осуществления, хотя изображены как отдельные этапы на фиг. 8, этапы 802-810 могут не быть отдельными этапами. В других вариантах осуществления способ, показанный на фиг. 8, может не иметь все из вышеописанных этапов и/или может иметь другие этапы в дополнение к или вместо этапов, перечисленных выше. Этапы способа, показанного на фиг. 8, могут быть выполнены в другом порядке. Подмножества этапов, перечисленных выше как часть способа, показанного на фиг. 8, могут быть использованы, чтобы формировать свой собственный способ. Этапы способа 800 могут быть повторены в любом сочетании и порядке любое число раз, например, непрерывно в цикле для того, чтобы поддерживать контроль.
Фиг. 9 показывает блок-схему последовательности операций варианта осуществления способа 900 изготовления узла уравновешенного основания и соединителя ребер реберного датчика 102. Этапы способа для способа 900 представлены с вариантами осуществления, которые включают в себя ссылки на элементы, представленные на других чертежах и в описаниях других чертежей. Все возможности, структуры, относительные соединения и позиционирования этих элементов, раскрытые на других чертежах и в описаниях других чертежей, рассматриваются в целях исполнения этих этапов. В варианте осуществления узел уравновешенного основания может быть компонентом реберного датчика 102.
Этап 902 является, необязательно, формированием преобразователей 104a-c, первого и второго ребра 108a и 108b, измерительной электронной аппаратуры 112, соединителя 116 основания и первого и второго соединителя 120a и 120b ребер. Способы производства, используемые для формирования этих компонентов, являются устоявшимися в области техники, например, 3D-печать, формование, соединение отдельно сформированных компонентов и/или т.п.
Этап 904 является формированием, по меньшей мере, одного основания 106. Основание 106 может быть плоским или практически плоским элементом с небольшой толщиной относительно площади своих более крупных поверхностей. В варианте осуществления основание 106 может быть сформировано как тонкое и/или может быть сформировано с изменяющейся или единообразной твердостью. Например, основание 106 может быть сформировано как изменчивое основание 306, так что середина изменчивого основания 306 (являющаяся серединой поперечной оси 131) является менее твердой по сравнению с краями (изменчивого основания 306 по поперечной оси 131). Это изменение может быть осуществлено посредством формирования основания 106 путем формования, так что оно создает изменчивое основание 306 с серединой (по поперечной оси 131), являющейся более тонкой (имеющей меньше материала) по сравнению с краями (изменчивое основание 306 по поперечной оси 131). В другом варианте осуществления изменение может быть осуществлено посредством удаления, возможно путем отрезания фрагментов основания 106, чтобы делать основание 106 изменчивым основанием с серединой (вдоль поперечной оси 131), являющейся более тонкой (имеющей меньше материала) по сравнению с краями (изменчивого основания 306 по поперечной оси 131). В другом варианте осуществления основание 106 может состоять из различных материалов вдоль поперечной оси 131, делающих основание изменчивым основанием 306, так что середина изменчивого основания 306 (вдоль поперечной оси 131) является более мягкой по сравнению с краями (изменчивого основания 306 по поперечной оси 131).
Этап 906 является формированием уравновешивающего ребра 118. Уравновешивающее ребро 118 может быть вытянутым элементом и может быть изготовлено с помощью любых стандартных способов производства, и из любых материалов, известных в области техники, которые являются достаточными, чтобы, по меньшей мере, ограничивать, до некоторой степени, движение основания 106. В варианте осуществления уравновешивающее ребро 118 может иметь центральную линию 198, представляющую центр наибольшей длины уравновешивающего ребра 118, если уравновешивающее ребро 118 является симметричным по этой длине, по меньшей мере, по одной оси, например, симметричным по поперечной оси 131 относительно центральной линии 198. Уравновешивающее ребро 118 может иметь изменяющуюся толщину вокруг центральной линии 198 по длине центральной линии 198. Например, в варианте осуществления, толщина, по меньшей мере, одного наконечника уравновешивающего ребра 118 по поперечной оси 131 относительно центральной линии 198 может быть больше толщины среднего фрагмента уравновешивающего ребра 197 по поперечной оси 131 относительно центральной линии 198. В другом осуществления, толщина, по меньшей мере, одного наконечника уравновешивающего ребра 118 по поперечной оси 131 вокруг центральной линии 198 может быть меньше толщины среднего фрагмента уравновешивающего ребра 197 по поперечной оси 131 вокруг центральной линии 198.
Этап 908 является присоединением уравновешивающего ребра 118 к основанию 106. Уравновешивающее ребро 118 может быть присоединено к основанию в средней позиции основания по поперечной оси 131, возможно с вытянутым фрагментом вдоль или практически вдоль оси 141 потока. В варианте осуществления, в котором основание 106 имеет ребра 108a и 108b, присоединенные к основанию 106, или будет иметь ребра 108a и 108b, присоединенные к основанию 106, уравновешивающее ребро 118 может быть присоединено к основанию 106 между присоединенными ребрами 108a и 108b, возможно присоединено между ребрами 108a и 108b вдоль поперечной оси 131, а также возможно присоединено равноудаленно от позиции для присоединения или присоединенной к первому ребру 108a и другой позиции для присоединения или присоединенной ко второму ребру 108b вдоль поперечной оси 131. Узел, сформированный, когда уравновешивающее ребро 118 присоединяется к основанию 106 (или изменчивому основанию 306), может считаться узлом уравновешенного основания реберного датчика 102. В варианте осуществления уравновешивающее ребро 118 может быть присоединено к реберному датчику 102, так что центральная линия 198 является параллельной или практически параллельной оси 141 потока. В варианте осуществления уравновешивающее ребро 118 может иметь равномерную толщину вокруг центральной линии 198 вдоль оси 141 потока. В другом варианте осуществления уравновешивающее ребро 118 может иметь изменяющуюся толщину вдоль оси 141 потока, вокруг центральной линии 198 по поперечной оси 131. Например, в варианте осуществления, толщина по поперечной оси 131, по меньшей мере, одного наконечника уравновешивающего ребра 118 вокруг центральной линии 198 может быть больше толщины по поперечной оси 131 среднего фрагмента уравновешивающего ребра 197 вокруг центральной линии 198. Например, в варианте осуществления, толщина, по меньшей мере, одного наконечника уравновешивающего ребра 118 по поперечной оси 131 относительно центральной линии 198 может быть меньше толщины среднего фрагмента уравновешивающего ребра 197 по поперечной оси 131 относительно центральной линии 198.
Этап 910 является формированием, по меньшей мере, одного соединителя ребер (например, первого и второго соединителей 120a и/или 120b ребер). Способы производства для изготовления элементов, таких как соединитель ребер, являются хорошо известными в области техники, например, формование, экструзия и другие способы. Соединители ребер могут быть сформированы, например, из металла или композита. По меньшей мере, один соединитель ребер может быть сформирован во множестве форм, например, как стержни, полосы или распорные штанги. В варианте осуществления, по меньшей мере, один соединитель ребер может быть сформирован с ребрами 108a и 108b как единая часть, сводя к нулю необходимость в отдельном этапе формирования ребер 108a и 108b (как на этапе 702) и/или отдельном этапе присоединения, по меньшей мере, одного соединителя ребер к ребрам 108a и 108b. В варианте осуществления, по меньшей мере, один соединитель ребер может быть сформирован с одним или более соединительными элементами, сконфигурированными, чтобы более легко и/или более эффективно присоединять, по меньшей мере, один соединитель ребер к ребрам 108a и 108b, например, один или более наконечников, по меньшей мере, одного соединителя ребер. В другом варианте осуществления одно или более ребер 108a и 108b могут быть сформированы с соединительными элементами, чтобы более легко и/или более эффективно присоединять, по меньшей мере, один соединитель ребер к ребрам 108a и 108b. В еще одном варианте осуществления, по меньшей мере, один соединитель ребер и ребра 108a и 108b могут, каждое, иметь соответствующие или взаимодополняющие соединительные элементы для присоединения, по меньшей мере, одного соединителя ребер к ребрам 108a и 108b. В варианте осуществления, по меньшей мере, один соединитель ребер может быть двумя, тремя, четырьмя, пятью, шестью или любым другим числом соединителей ребер.
Этап 912 является присоединением, по меньшей мере, одного соединителя ребер к первому и второму ребру 108a и 108b. В вариантах осуществления, в которых одно или более ребер 108a и 108b и, по меньшей мере, один соединитель ребер имеют соединительные элементы, по меньшей мере, один соединитель ребер и ребра 108a и 108b могут быть соединены в/или посредством соединительных элементов. Любой способ присоединения рассматривается, например, сварка, пайка твердым припоем, низкотемпературная пайка, клеевое соединение, формование или литье пластика, сопряженные физические или механические соединители и т.п.
Этап 914 является присоединением ребер 108a и 108b к основанию 106. Ребра 108a и 108b могут быть присоединены к основанию 106 любым образом, например, формируются вместе посредством формования, присоединяются посредством клеевого соединения, сварки или пайки твердым припоем и другими известными способами в области техники. В варианте осуществления основание 106 имеет отверстия, сквозь которые выступы 114a и 114b ребер могут выступать, и соединение устанавливается посредством стандартных способов соединения, таких как клеевое соединение, сварка и пайка твердым припоем.
Этап 916 является необязательным формированием реберного датчика 102 посредством присоединения узла уравновешенного основания к ребрам 108a и 108b (возможно с уравновешивающим ребром 118 между ребрами 108a и 108b на основании 106), преобразователям 104a-c, измерительной электронной аппаратуре 112 и/или соединителю 116 основания. В варианте осуществления выступы 114a и 114b ребер могут иметь сегменты, сегменты, возможно, каждый, выступают через отверстия в основании 106, когда реберный датчик 302 собран. В варианте осуществления преобразователи 104a-c могут быть присоединены к выступам 114a и 114b ребер. Выступы 114a и 114b ребер могут иметь различные сегменты для присоединения преобразователей. Например, в варианте осуществления каждый из выступов 114a и 114b ребер может иметь три сегмента, сегменты, скажем, имеют взаимодополняющие поверхности, которые противопоставлены друг другу между выступами 114a и 114b ребер. Каждый из выступов 104a-c может быть присоединен к одному из соответствующих сегментов выступов 114a и 114b ребер (соответствующие сегменты возможно обращены друг к другу по поперечной оси 131). В этом варианте осуществления три преобразователя 104a-c могут быть выровнены друг с другом по оси 141 потока (по меньшей мере, когда реберный датчик 102 не работает). В этом варианте осуществления преобразователи 104a-c могут быть присоединены к ребрам 108a и 108b в позициях, находящихся на стороне основания 106, которая противоположна стороне основания 106, которая имеет фрагменты ребер 108a и 108b, которые погружаются.
Спецификация рассматривает альтернативные порядки этих этапов, включающие в себя все из тех, которые являются целесообразными с учетом необходимого прядка некоторых этапов. Например, этапы, на которых соединители 120a и 120b ребер присоединяются к ребрам 108a и 108b, и ребра 108a и 108b присоединяются к основанию 106, могут быть проведены в любом порядке относительно друг друга. Также, узел уравновешенного основания может быть сформирован перед, во время или после того, как узел соединителя ребер сформирован.
В варианте осуществления каждый из этапов способа, показанного на фиг. 9, является отдельным этапом. В другом варианте осуществления, хотя изображены как отдельные этапы на фиг. 9, этапы 902-916 могут не быть отдельными этапами. В других вариантах осуществления способ, показанный на фиг. 9, может не иметь все из вышеописанных этапов и/или может иметь другие этапы в дополнение к или вместо этапов, перечисленных выше. Этапы способа, показанного на фиг. 9, могут быть выполнены в другом порядке. Подмножества этапов, перечисленных выше как часть способа, показанного на фиг. 9, могут быть использованы, чтобы формировать свой собственный способ. Этапы способа 900 могут быть повторены в любом сочетании и порядке любое число раз, например, непрерывно в цикле для того, чтобы поддерживать контроль.
Сравнения
Фиг. 10-11 показывают сравнения, объясняющие некоторые результаты вариантов осуществления признаков Заявителя, представленных в этой Спецификации.
Фиг. 10 показывает сравнение 1000 вариантов осуществления реберного датчика 102 с и без соединителей 120a и 120b ребер, возбуждаемого в синфазных (IP) модах и несинфазных (OOP) модах. Реберные датчики 102a и 102b являются вариантами осуществления реберного датчика 102 без и с соединителями 120a и 120b ребер, соответственно. Сравнение 1000 имеет первый ряд 1042, второй ряд 1044, первое изображение 1052, второе изображение 1054, третье изображение 1056 и четвертое изображение 1058.
Первый ряд 1042 является рядом изображений, представляющих реберный датчик 102a без соединителей 120a и 120b ребер, первый ряд 1042 имеет первое изображение 1052 и второе изображение 1054. Первое изображение 1052 показывает вариант осуществления реберного датчика 102a без соединителей 120a и 120b ребер, реберный датчик 102a возбуждается в синфазной моде. Второе изображение 1054 показывает вариант осуществления реберного датчика 102a, возбужденный в несинфазной моде. Может быть видно, что, в точке 1055, ребра несинфазной моды показывают небольшое завихрение, фактически оставаясь плоскими. Может быть понятно, что существует небольшое разделение частот между синфазной модой и несинфазными модами, поскольку и те, и другие возбуждаются с одинаковым усилием, при этом их ответные частоты приближаются практически к одинаковым значениям. Этот недостаток разделения между вибрационными модами может приводить в результате к соединению моды возбуждения и собственной моды и делать загрязненной предполагаемую форму возбуждения, так что погрешность калибровки и измерения может получаться в результате.
Второй ряд 1044 является рядом изображений, представляющих реберный датчик 102b с соединителями 120a и 120b ребер, второй ряд 1044 имеет третье изображение 1056 и четвертое изображение 1058. Третье изображение 1056 показывает вариант осуществления реберного датчика 102b с соединителями 120a и 120b ребер, датчик 102b возбуждается в синфазной моде. Второе изображение 1054 показывает вариант осуществления реберного датчика 102b, имеющего соединители 120a и 120b ребер, возбуждаемого в несинфазной моде. Может быть видно, что, в точке 1059, несинфазная мода показывает значительное завихрение, создающее более значительную амплитуду, частоту и разрешение по фазе. Это формирует значительное разделение по частоте между синфазной модой и несинфазной модой, поскольку и та, и другая возбуждаются с одинаковым усилием, при этом реберный датчик 102b в несинфазной моде формирует частоту, которая, в этом варианте осуществления, на 20% выше частоты, формируемой посредством синфазной моды. Это частотное разделение между синфазной и несинфазной модами может, по меньшей мере, ограничивать соединение между синфазной модой и несинфазной модой, потенциально предоставляя возможность для лучшего измерения и калибровки. Увеличенное завихрение может предоставлять возможность реберному датчику 102b лучше присоединять ребра к протекающей среде и индуцировать реакции Кориолиса, возможно аналогично типичным массовым расходомерам Кориолиса.
Фиг. 11 показывает сравнение 1100 вариантов осуществления реберного датчика 102 с и без уравновешивающего ребра 118 в недеформированной и деформированной позициях. Реберные датчики 102c и 102d являются вариантами осуществления реберного датчика 102 с и без уравновешивающего ребра 118, соответственно. Сравнение 1100 имеет первый ряд 1142, второй ряд 1144, первое изображение 1152, второе изображение 1154, третье изображение 1156 и четвертое изображение 1158.
Первый ряд 1142 является рядом изображений, представляющих реберный датчик 102c без уравновешивающего ребра 118, первый ряд 1142 имеет первое изображение 1152 и второе изображение 1154. Первое изображение 1152 показывает вариант осуществления реберного датчика 102c без уравновешивающего ребра 118, реберный датчик 102c находится в недеформированном положении. Второе изображение 1154 показывает вариант осуществления реберного датчика 102c без уравновешивающего ребра 118 в деформированном положении. Может быть видно, что, в точках 1155a и 1155b, оси вращения ребер 108a и 108b находятся на краях основания 106. Может быть понятно, что результирующее движение узла датчика будет формировать фактическое движение в направлении вертикальной оси 151, через узел датчика, вызывающее неуравновешенность и перемещающее узел датчика относительно опорной конструкции, к которой реберный датчик 102c присоединен.
Второй ряд 1144 является рядом изображений, представляющих реберный датчик 102d с уравновешивающим ребром 118, второй ряд 1144 имеет третье изображение 1156 и четвертое изображение 1158. Третье изображение 1156 показывает вариант осуществления реберного датчика 102d с уравновешивающим ребром 118, реберный датчик 102d находится в недеформированном положении. Четвертое изображение 1154 показывает вариант осуществления реберного датчика 102d, имеющего уравновешивающее ребро 118, реберный датчик 102d находится в деформированном положении. Может быть видно, что, в точках 1159a и 1159b, что оси вращения ребер 108a и 108b находятся на присоединениях ребер 108a и 108b к основанию 106. Может быть понятно, что результирующее движение ребер 108a и 108b не будет формировать фактическое движение по вертикальной оси 151, через середину узла датчика, обеспечивающую равновесие и не перемещающую узел датчика относительно опорной конструкции, к которой реберный датчик 102d присоединяется. В варианте осуществления это может не предоставлять фактическое движение ребер (или зубцов) в вертикальном направлении. Может быть понятно, что, в некоторых вариантах осуществления, ребра 108a и 108b реберного датчика 102d могут вращаться вокруг соответствующих центральных точек ребер 108a и 108b (в 1159a и 1159b, соответственно).
Фиг. 12 показывает сравнение 1200 вариантов осуществления реберного датчика 102 с и без соединителей 120a и 120b ребер на внешней стороне 344 основания 106, возбуждаемого в синфазных (IP) модах и несинфазных (OOP) модах. Реберные датчики 102e и 102f являются вариантами осуществления реберного датчика 102 без и с соединителями 120a и 120b ребер, соответственно. Сравнение 1200 имеет первый ряд 1242, второй ряд 1244, первое изображение 1252, второе изображение 1254, третье изображение 1256 и четвертое изображение 1258.
Первый ряд 1242 является рядом изображений, представляющих реберные датчики 102e без соединителей 120a и 120b ребер, первый ряд 1242 имеет первое изображение 1252 и второе изображение 1254. Первое изображение 1252 показывает вариант осуществления реберного датчика 102a без соединителей 120a и 120b ребер, реберный датчик 102a возбуждается в синфазном режиме. Второе изображение 1254 показывает вариант осуществления реберного датчика 102a, возбужденный в несинфазной моде. Может быть видно, что, в точке 1255, ребра несинфазной моды показывают небольшое завихрение, фактически оставаясь плоскими. Может быть понятно, что существует небольшое разделение частот между синфазной модой и несинфазными модами, поскольку и те, и другие возбуждаются с одинаковым усилием, при этом их ответные частоты приближаются практически к одинаковым значениям. Этот недостаток разделения между вибрационными модами может приводить в результате к соединению моды возбуждения и собственной моды и делать загрязненной предполагаемую форму возбуждения, так что погрешность калибровки и измерения может получаться в результате.
Второй ряд 1244 является рядом изображений, представляющих реберные датчики 102b с соединителями 120a и 120b ребер, второй ряд 1244 имеет третье изображение 1256 и четвертое изображение 1258. Третье изображение 1256 показывает вариант осуществления реберного датчика 102b с соединителями 120a и 120b ребер, датчик 102b возбуждается в синфазной моде. Второе изображение 1254 показывает вариант осуществления реберного датчика 102b, имеющего соединители 120a и 120b ребер, возбуждаемого в несинфазной моде. Это формирует значительное разделение по частоте между синфазной модой и несинфазной модой, поскольку и та, и другая возбуждаются с одинаковым усилием, при этом реберный датчик 102b в несинфазной моде формирует частоту, которая, в этом варианте осуществления, на 20% выше частоты, формируемой посредством синфазной моды. Это частотное разделение между синфазной и несинфазной модами может, по меньшей мере, ограничивать соединение между синфазной модой и несинфазной модой, потенциально предоставляя возможность для лучшего измерения и калибровки. Увеличенное завихрение может предоставлять возможность реберному датчику 102b лучше присоединять ребра к протекающей среде и индуцировать реакции Кориолиса, возможно аналогично типичным массовым расходомерам Кориолиса.
Подробные описания вышеупомянутых вариантов осуществления не являются исчерпывающими описаниями всех вариантов осуществления, рассматриваемых изобретателями как находящиеся в рамках настоящего описания. В действительности, специалисты в области техники поймут, что определенные элементы вышеописанных вариантов осуществления могут по-разному быть объединены или устранены, чтобы создавать дополнительные варианты осуществления, и такие дополнительные варианты осуществления попадают в рамки и учения настоящего описания. Также обычным специалистам в данной области техники будет очевидно, что вышеописанные варианты осуществления могут быть объединены в целом или частично, чтобы создавать дополнительные варианты осуществления в рамках и учениях настоящего описания. Когда формулировка "и/или" используется, следует понимать, что варианты осуществления, в которых одно или более из "и" и "или" применяются, полностью рассматриваются и раскрываются в целях этой спецификации.
Таким образом, хотя конкретные варианты осуществления описываются в данном документе в иллюстративных целях, различные эквивалентные модификации возможны в рамках настоящего описания, как поймут специалисты в связанной области техники. Учения, предоставленные в данном документе, могут быть применены к другим способам и устройствам для определения параметра вибрационной реакции вибрационного элемента, а не только к вариантам осуществления, описанным выше и показанным на сопровождающих чертежах. Соответственно, рамки вариантов осуществления, описанных выше, должны быть определены из последующей формулы изобретения.
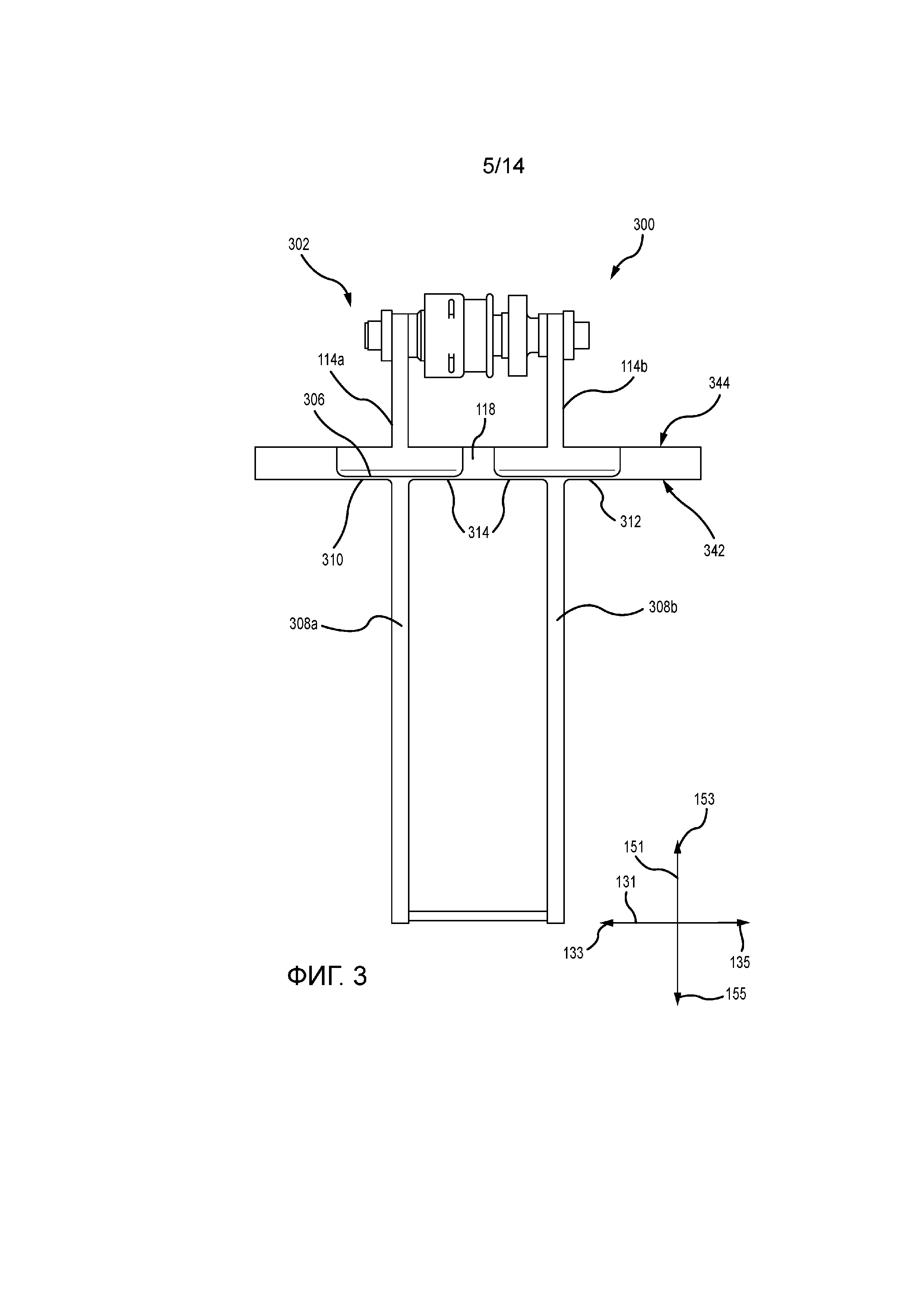
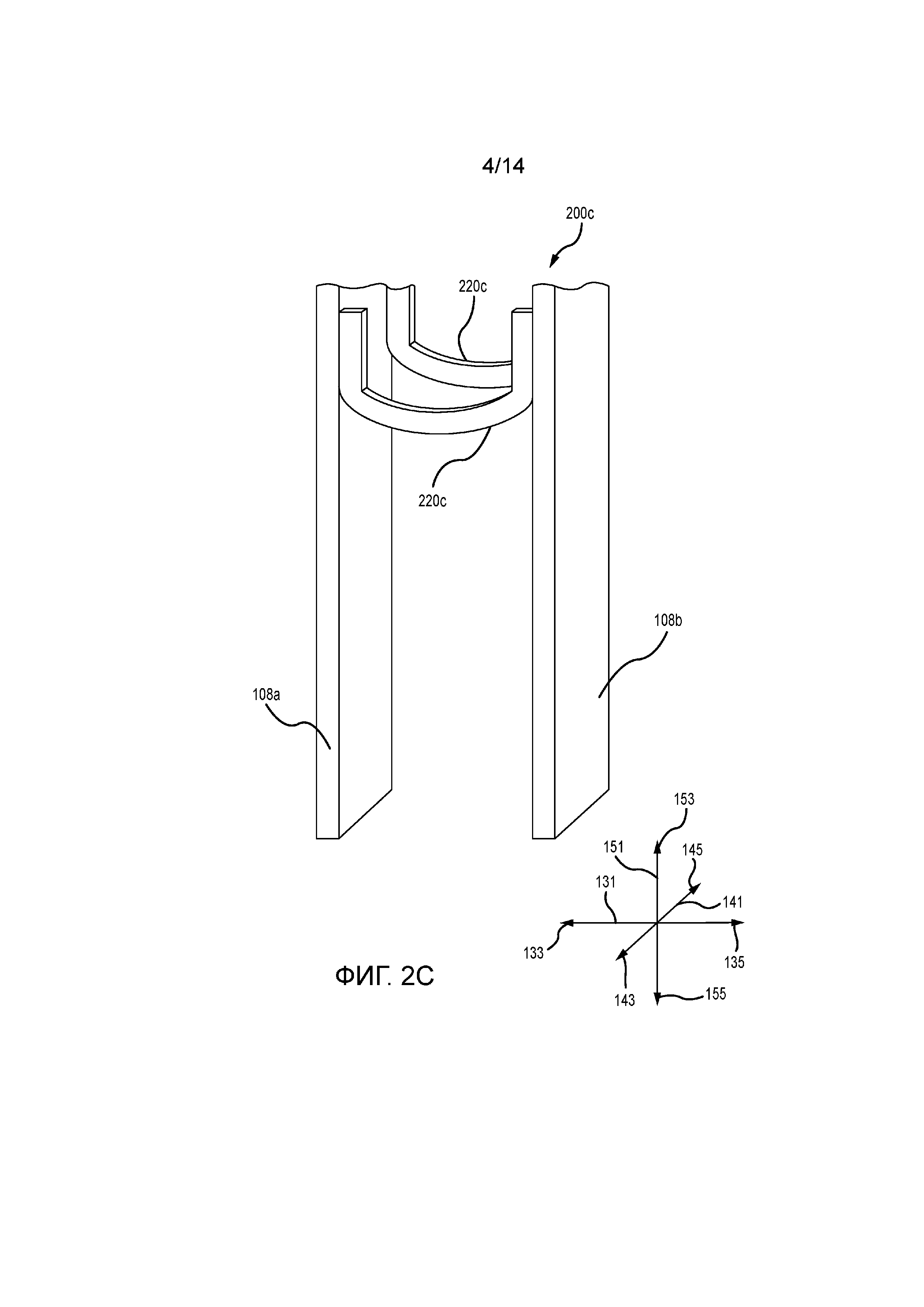
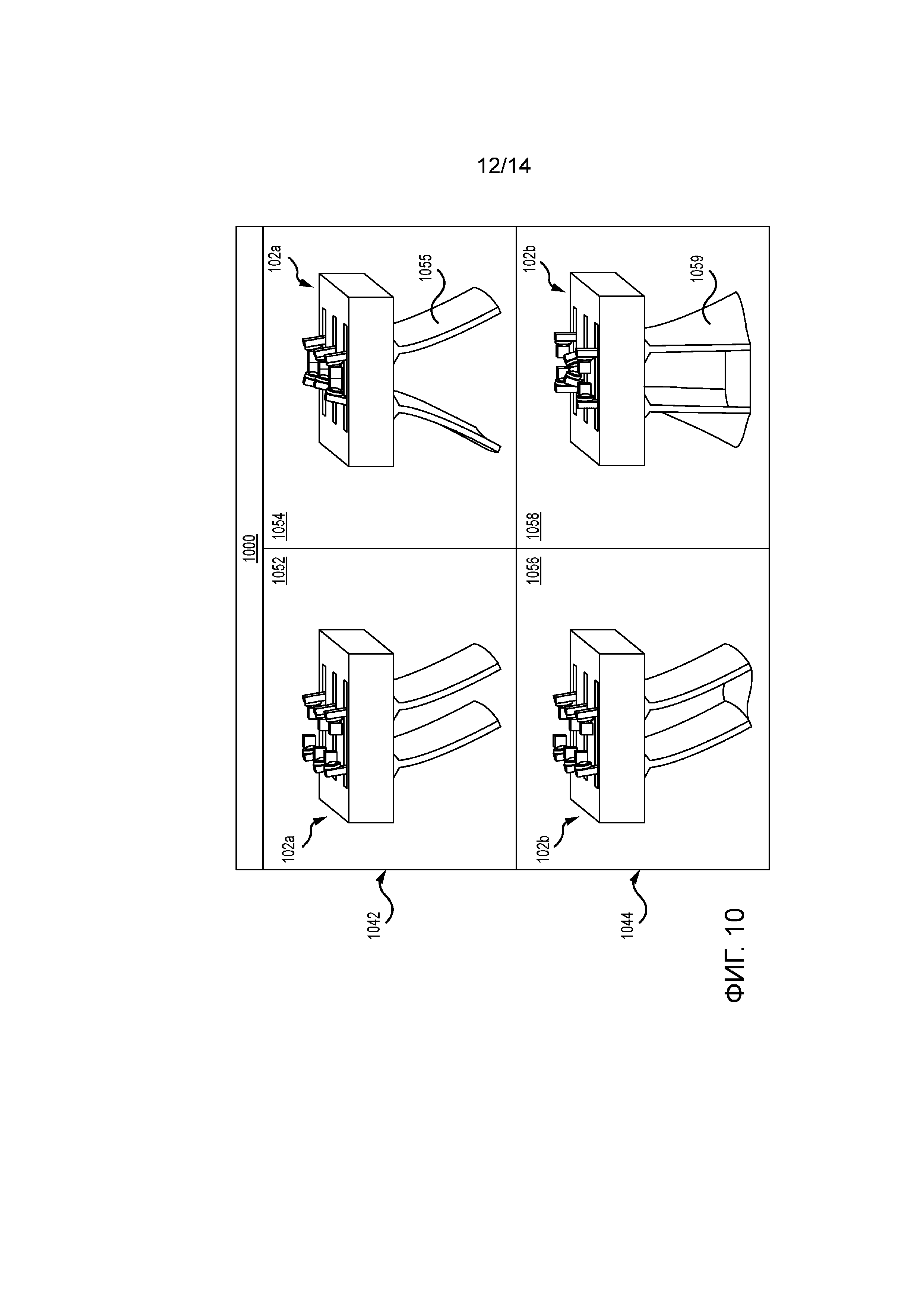
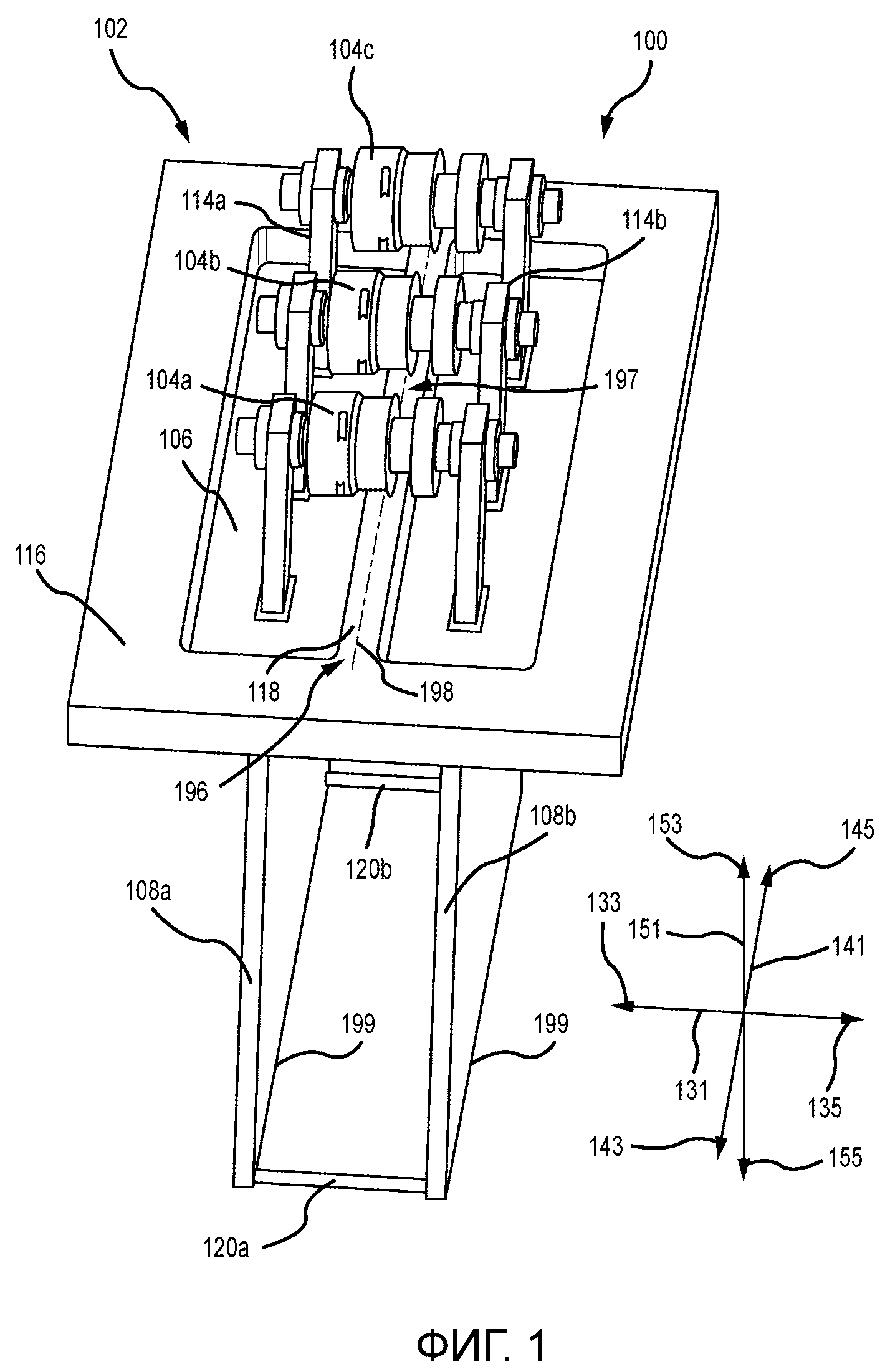
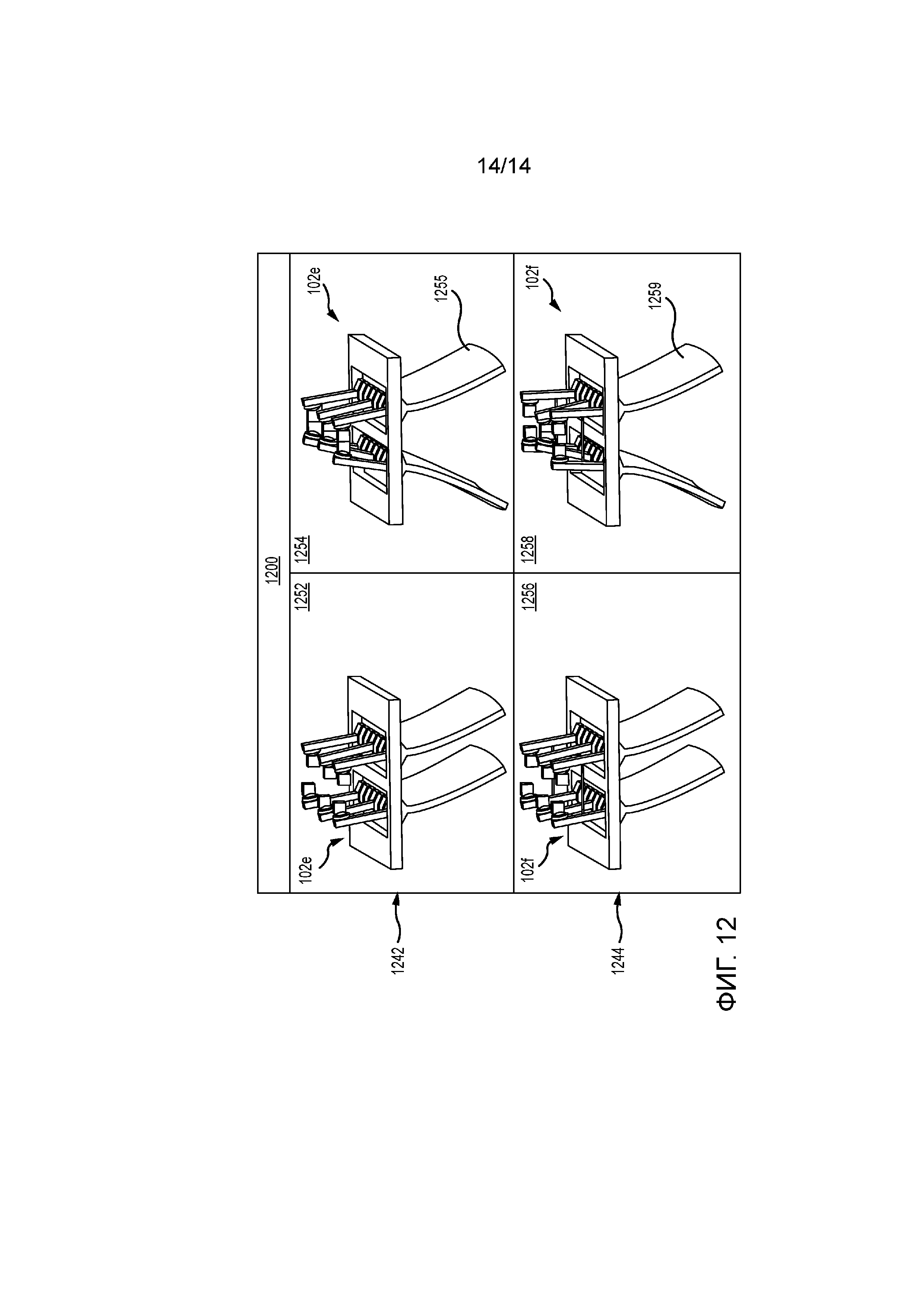
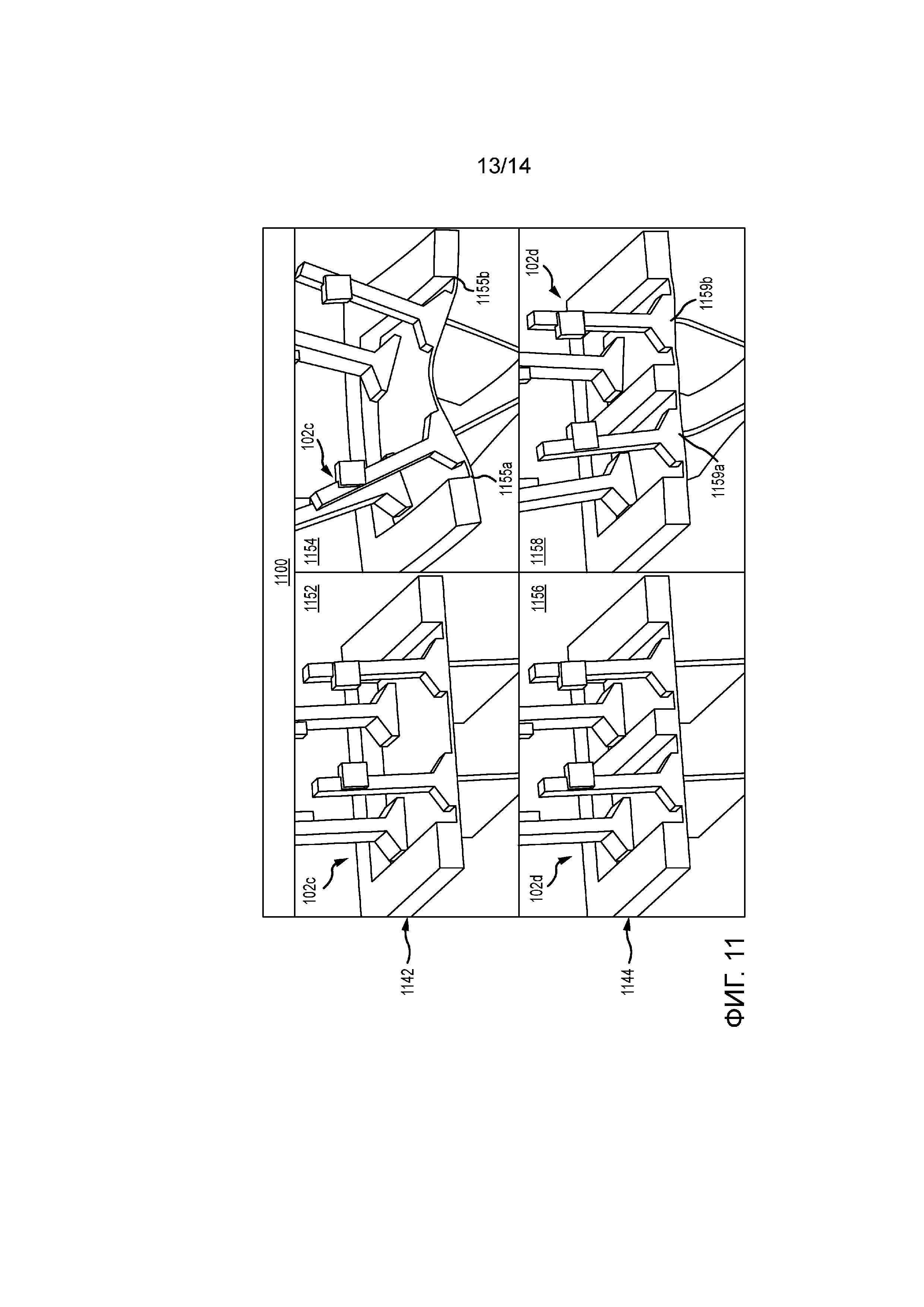
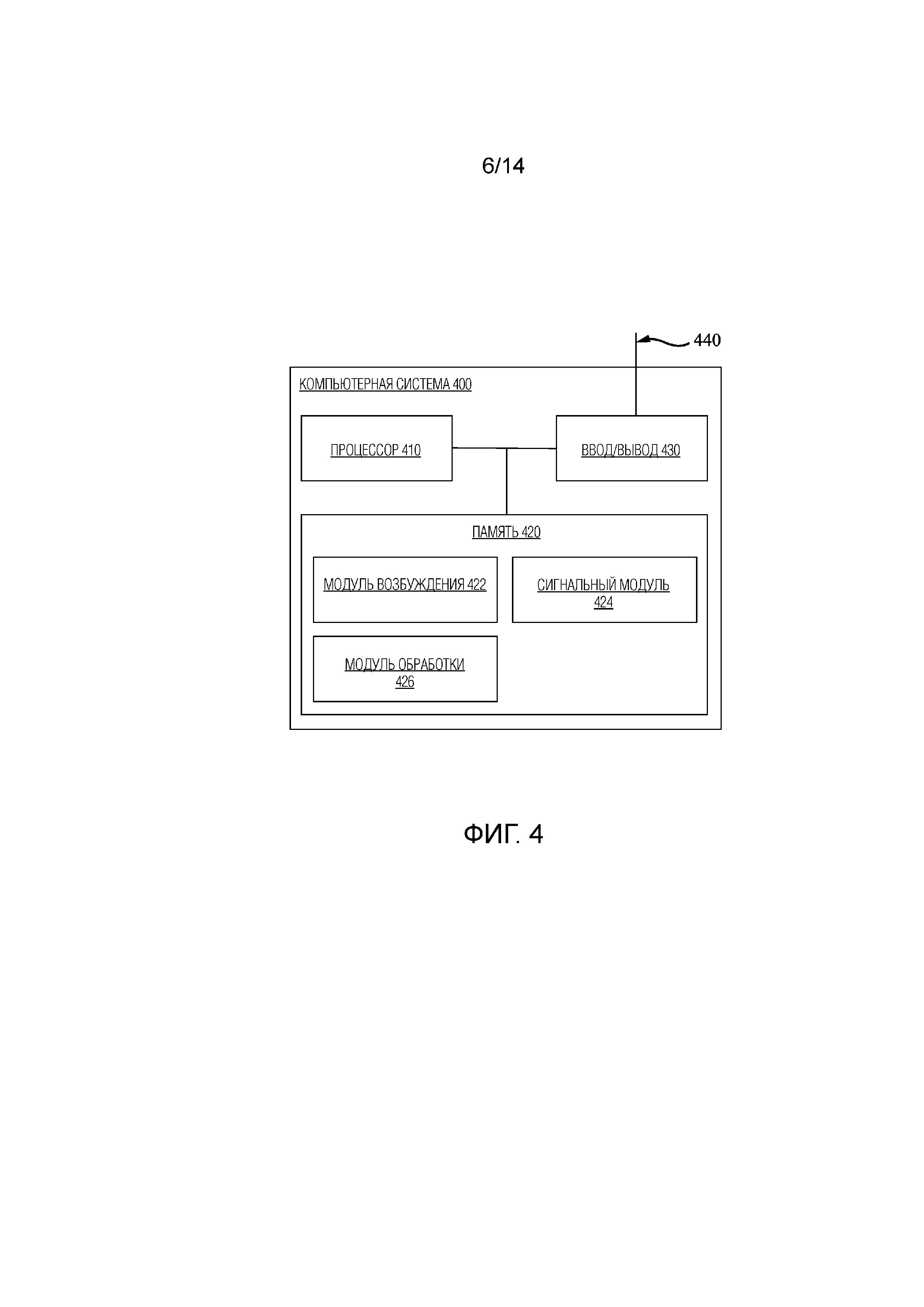
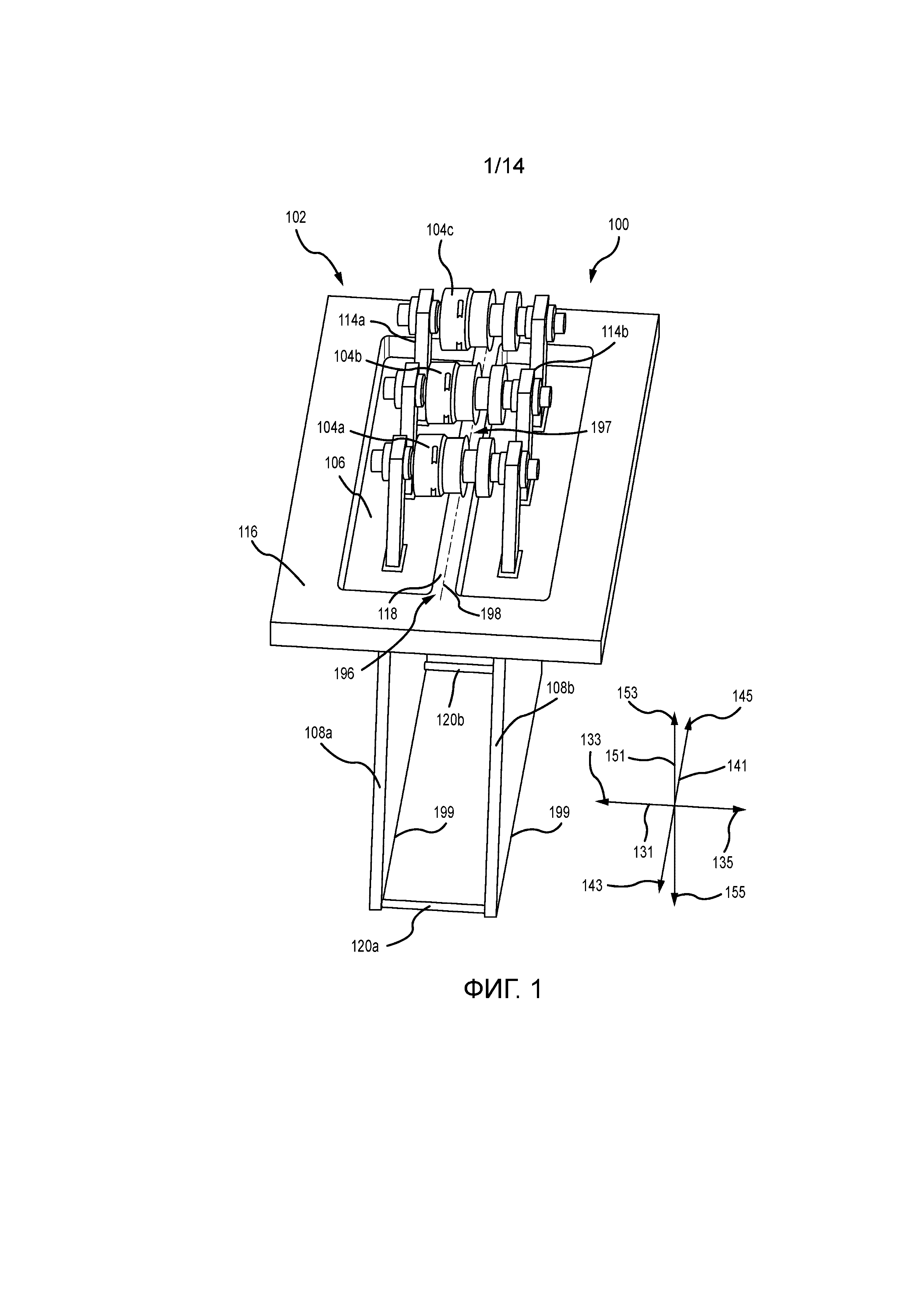
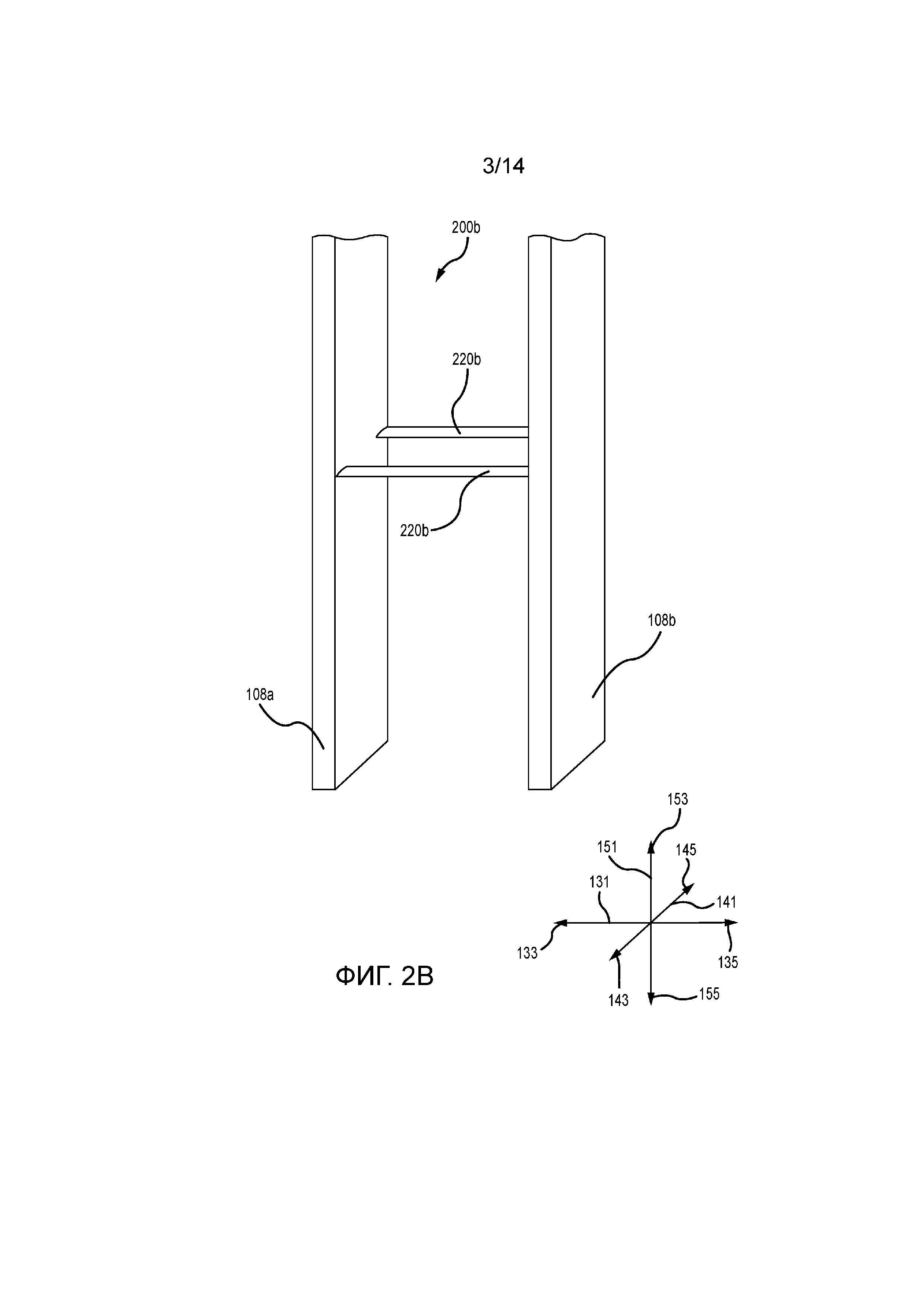
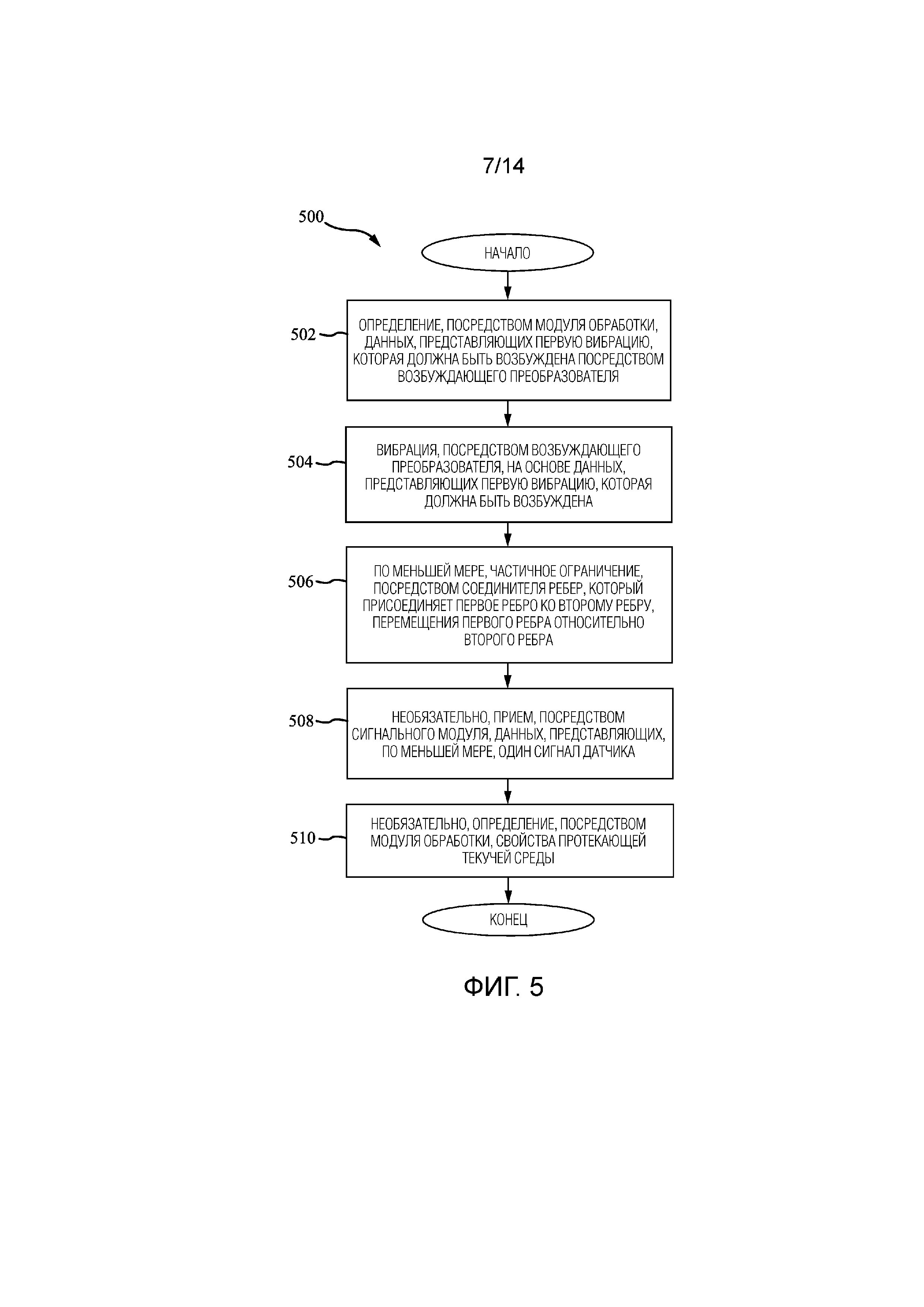
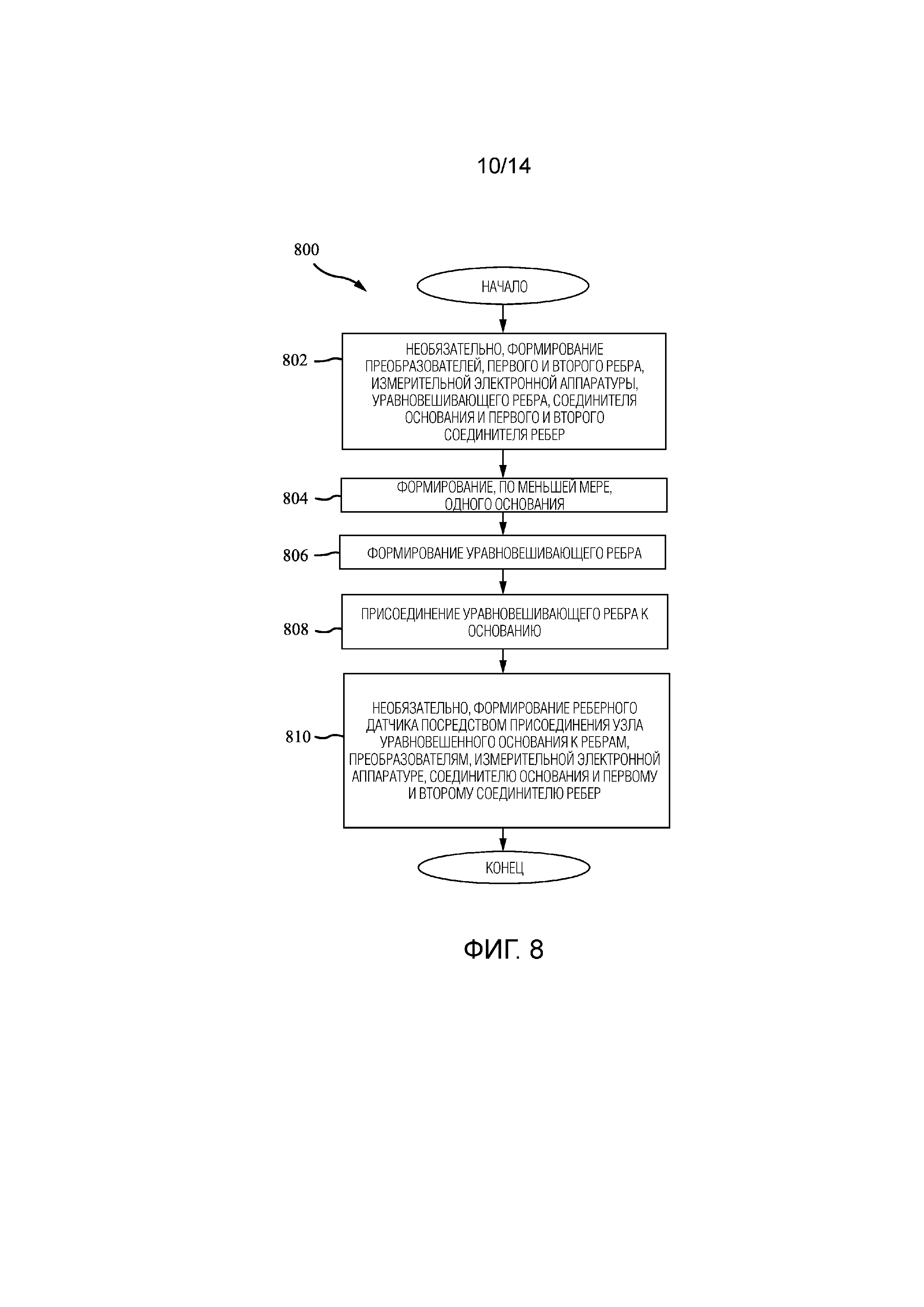
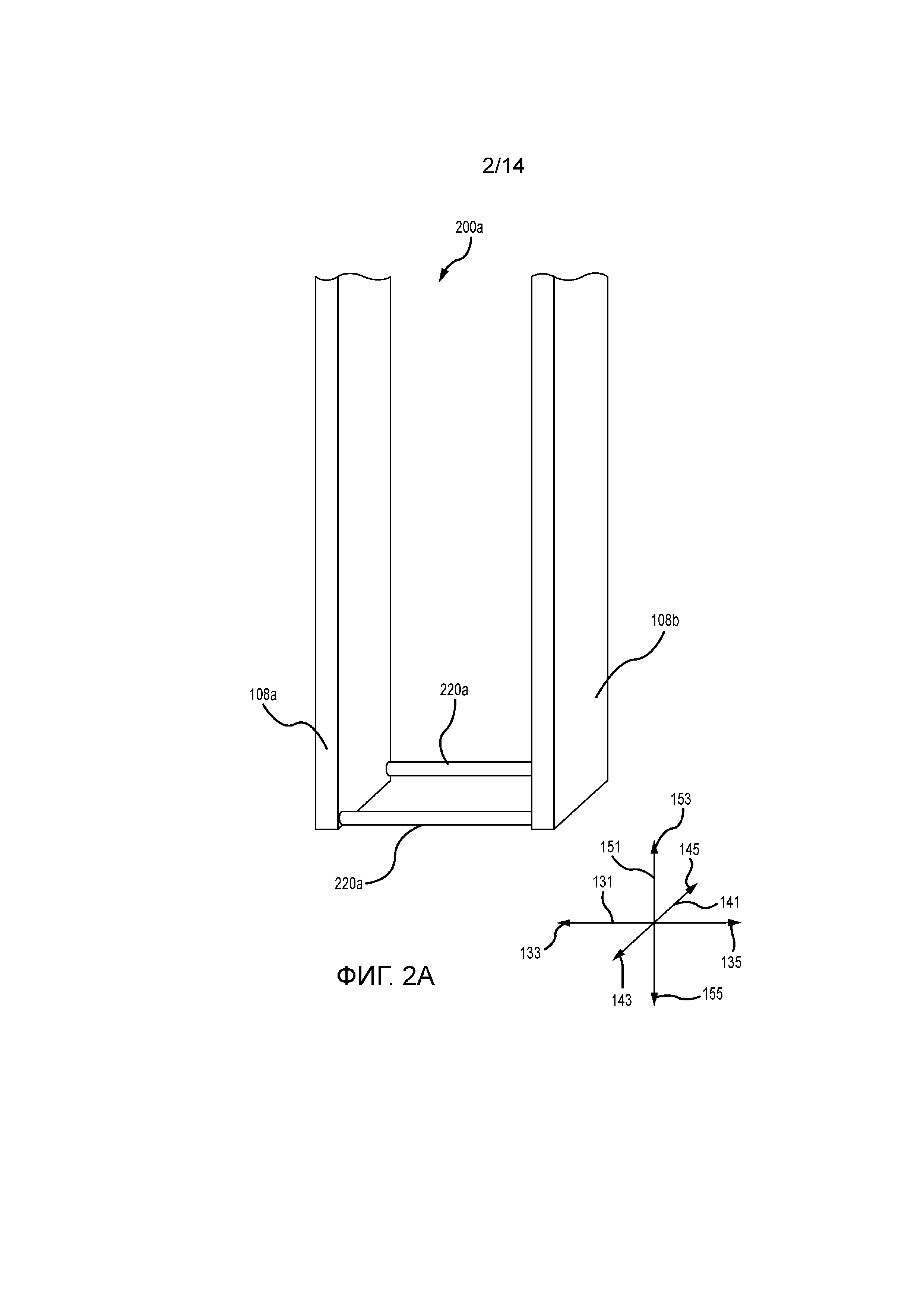
Оптимизация работы процессора в обрабатывающей системе, содержащей один или более цифровых фильтров
Способ и устройство для вибрирования расходомерной трубки вибрационного расходомера
Стягивающая оправка с лепестковыми вырезами для пайки твердым припоем к расходомерной трубке
Способ и система преобразования данных
Передатчик с таймером относительного времени
Расходомер, включающий в себя балансный элемент
Способ и устройство для определения ошибки расхода в вибрационном расходомере
Измерительная электроника и способ количественного анализа перекачиваемого флюида
Балансировочное устройство для вибрационного расходомера
Способ и устройство для определения и компенсации изменения дифференциального смещения нуля вибрационного расходомера
Устройства и способы определения порога кориолиса
Многоканальная расходомерная трубка

