Результат интеллектуальной деятельности: СПОСОБ РЕГУЛИРОВАНИЯ РАБОЧИХ ПАРАМЕТРОВ ЯДЕРНОГО РЕАКТОРА И СООТВЕТСТВУЮЩИЙ ЯДЕРНЫЙ РЕАКТОР
Вид РИД
Изобретение
Настоящее изобретение касается регулирования рабочих параметров ядерного реактора.
Учитывая значительный вклад ядерной отрасли во французскую энергетику, массивное вовлечение источников возобновляемой энергии (ветроустановки и солнечные батареи) в систему электросети предполагает дополнительную потребность в гибкости производства энергии при помощи ядерных реакторов. Гибкость отражает способность электростанции к адаптации своего производства. Возобновляемые виды энергии отличаются своей прерывистостью во времени или в зависимости от погодных условий. В отсутствие системы хранения массы энергии это повышение гибкости все больше приводит к необходимости регулирования мощности, вырабатываемой традиционными генераторами, в том числе ядерными реакторами во Франции.
Кроме того, регулирование рабочих параметров ядерного реактора следует проводить с соблюдением очень строгих многоцелевых технических требований. В частности, системы регулирования должны минимизировать изменения рабочих параметров и минимизировать воздействия на приводы. В настоящее время системы регулирования ядерных реакторов основаны на применении ПИД-регуляторов. Они могут учитывать эти последние требования лишь в очень незначительной степени.
В этом контексте изобретение призвано предложить способ регулирования рабочих параметров ядерного реактора, обеспечивающий дополнительную гибкость и одновременное соблюдение очень строгих многоцелевых технических требований.
В связи с вышеизложенным, объектом изобретения является способ регулирования рабочих параметров ядерного реактора, причем эти рабочие параметры включают в себя по меньшей мере среднюю температуру активной зоны и осевой дисбаланс мощности, при этом способ содержит следующие этапы:
- получение текущего значения по меньшей мере одной входной величины;
- получение текущего значения вектора выходных величин, при этом выходные величины включают в себя по меньшей мере рабочие параметры;
- формирование контрольного значения вектора выходных величин с использованием текущего значения по меньшей мере одной входной величины;
- формирование вектора значений команд ядерного реактора при помощи супервизора, применяющего алгоритм опережающей коррекции, с использованием по меньшей мере указанного текущего значения указанной по меньшей мере одной входной величины и текущего значения вектора выходных величин;
- формирование корректирующих значений команд ядерного реактора при помощи регулятора, применяющего алгоритм управления с последовательными коэффициентами усиления, с использованием текущего значения вектора выходных величин и контрольного значения вектора выходных величин;
- формирование вектора скорректированных значений команд ядерного реактора с использованием вектора значений команд, сформированного супервизором, и вектора корректирующих значений команд, сформированного регулятором;
- регулирование рабочих параметров ядерного реактора путем управления приводами с использованием вектора скорректированных значений команд.
Способ регулирования может также иметь один или несколько нижеперечисленных отличительных признаков, рассматриваемых индивидуально или во всех возможных технических комбинациях:
- ядерный реактор содержит:
- бак;
- активную зону, содержащую множество ядерных топливных сборок и расположенную в баке;
- кластеры стержней управления реактивностью активной зоны и механизмы, выполненные с возможностью перемещать каждый кластер в направлении введения в активную зону или в направлении извлечения из активной зоны;
- первичный контур охлаждения активной зоны, в котором циркулирует первичный теплоноситель и который содержит холодную и горячую ветви, подсоединенные к баку, через которые первичный теплоноситель соответственно поступает в бак и выходит из бака;
- контур впрыска, выполненный с возможностью селективно впрыскивать в первичный теплоноситель нейтронный поглотитель или разбавитель без нейтронного поглотителя; при этом команды включают в себя по меньшей мере одну скорость перемещения кластеров управляющих стержней и по меньшей мере один расход впрыска нейтронного поглотителя или разбавителя;
- кластеры стержней перемещаются группами, при этом одна или несколько групп объединены в первом комплексе, при этом команды включают в себя по меньшей мере одну скорость перемещения группы или групп первого комплекса;
- другие группы объединены во втором комплексе, при этом, кроме скорости перемещения групп первого комплекса, команды включают в себя по меньшей мере одну скорость перемещения групп второго комплекса;
- группы первого комплекса перемещаются последовательно;
- первый комплекс содержит только одну группу;
- рабочие параметры дополнительно включают в себя положение введения групп первого комплекса;
- ядерный реактор содержит одну или несколько турбин, питаемых паром через первичный контур, при этом указанная по меньшей мере одна входная величина является мощностью, требуемой от турбины или турбин ядерного реактора;
- мощность, выдаваемая турбиной или турбинами ядерного реактора, включает в себя мощность, запрограммированную в соответствии с заранее определенной программой, например, заранее определенной для периода длительностью по меньшей мере в одни сутки, и возмущение мощности, при этом контрольное значение вектора выходных величин вырабатывают, используя только указанную запрограммированную мощность;
- кроме рабочих параметров, выходные величины включают в себя температуру первичного теплоносителя в горячей ветви и тепловую мощность активной зоны;
- алгоритм управления с последовательными коэффициентами усиления включает в себя множество линейных регуляторов, каждый из которых определяют для определенной рабочей точки ядерного реактора, при этом указанные рабочие точки предпочтительно распределены таким образом, чтобы охватывать диапазон мощности ядерного реактора в пределах от 25% до 100% от номинальной мощности ядерного реактора;
- каждая рабочая точка характеризуется определенным положением введения первого комплекса групп;
- каждый линейный регулятор выражается следующим образом:
uК = Kp(s)y1 + Ki(s)y2 при у1=у и у2=z,
где Kр и Ki являются матрицами коэффициентов усиления, s является переменной Лапласа, у является вектором отклонения выходных величин между текущим значением вектора выходных величин и контрольным значением вектора выходных величин, z является вектором отклонения рабочих параметров между текущим значением вектора контролируемых рабочих параметров и контрольным значением вектора контролируемых рабочих параметров, и uK является вектором корректирующих значений команд;
- способ содержит этап получения линейных регуляторов, включающий в себя для каждого линейного регулятора следующие подэтапы:
- выработку линеаризованной модели ядерного реактора посредством линеаризации нелинейной модели ядерного реактора в соответствующей рабочей точке, при этом линеаризованная модель связывает:
- вектор отклонения выходной данной и вектор отклонения рабочих параметров, с одной стороны, с
- по меньшей мере одним среди возмущения указанной по меньшей мере одной входной величины, возмущения вектора значений команд, возмущения вектора отклонения выходной данной и вектора корректирующих значений команд, с другой стороны;
при этом линеаризованная модель и линейный регулятор образуют систему с обратной связью для указанного положения введения;
- определение рабочих требований для ядерного реактора, соблюдаемых для заранее определенных возмущений указанной по меньшей мере одной входной величины или заранее определенных возмущений вектора значений команд или заранее определенных возмущений вектора отклонения выходной данной;
- перевод каждого рабочего требования в цифровое условие, соблюдаемое для функции перехода между:
- возмущением указанной по меньшей мере одной входной величины или возмущением вектора значений команд, или возмущением вектора отклонения выходной данной, с одной стороны, и
- либо отклонением между текущим значением одного из рабочих параметров и контрольным значением указанного рабочего параметра, либо отклонением между текущим значением одной из выходных величин и контрольным значением указанной выходной данной, либо одним из корректирующих значений команд, с другой стороны;
- определение коэффициентов усиления матриц коэффициентов усиления Kр и Ki, при этом указанные коэффициенты усиления определяют при помощи алгоритма оптимизации таким образом, чтобы стабилизировать по меньшей мере систему с обратной связью для соответствующей рабочей точки и соблюсти цифровые условия, соответствующие всем рабочим требованиям;
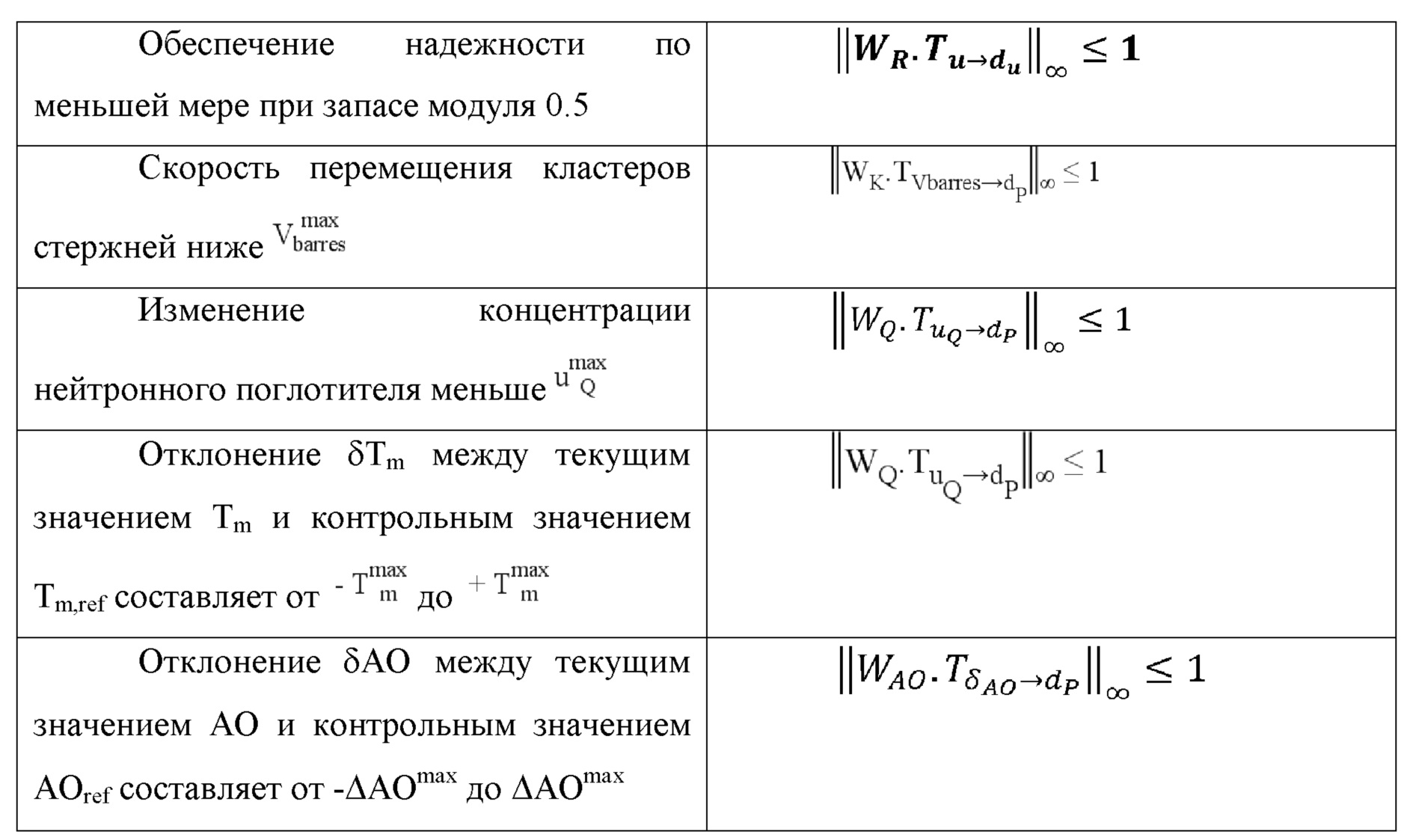
- для получения линейного регулятора учитывают одно или несколько из следующих рабочих требований:
- отклонение δTm между текущим значением Tm и контрольным значением Tm,ref составляет от  до
до  ;
;
- отклонение δАО между текущим значением АО и контрольным значением АОref составляет от -ΔАОmax до ΔАОmax;
- скорость перемещения кластеров стержней ниже  ;
;
- изменение концентрации нейтронного поглотителя ниже  , при этом является скоростью повышения концентрации нейтронного поглотителя в первичном контуре в результате впрыска нейтронного поглотителя с расходом
, при этом является скоростью повышения концентрации нейтронного поглотителя в первичном контуре в результате впрыска нейтронного поглотителя с расходом  ; следует соблюдать по меньшей мере для одного возмущения, которое является ступенью мощности, требуемой от турбины или турбин, с ±Р% от номинальной мощности PN ядерного реактора, при этом Р составляет от 5 до 15%;
; следует соблюдать по меньшей мере для одного возмущения, которое является ступенью мощности, требуемой от турбины или турбин, с ±Р% от номинальной мощности PN ядерного реактора, при этом Р составляет от 5 до 15%;
- указанное рабочее требование или указанные рабочие требования переводят в одно или несколько следующих цифровых условий:
-  ≤ 1, где
≤ 1, где  является функцией перехода между указанной ступенью мощности и δTm, при
является функцией перехода между указанной ступенью мощности и δTm, при  , ΔPmax=P%.PN;
, ΔPmax=P%.PN;
-  ≤ 1, где
≤ 1, где  является функцией перехода между указанной ступенью мощности и δАО, при
является функцией перехода между указанной ступенью мощности и δАО, при  , ΔPmax=P%.PN;
, ΔPmax=P%.PN;
-  ≤ 1, где
≤ 1, где  является функцией перехода между указанной ступенью мощности и скоростью перемещения кластеров, при
является функцией перехода между указанной ступенью мощности и скоростью перемещения кластеров, при  ;
;
-  ≤ 1, где
≤ 1, где  является функцией перехода между указанной ступенью мощности и изменением концентрации нейтронного поглотителя, при
является функцией перехода между указанной ступенью мощности и изменением концентрации нейтронного поглотителя, при  ;
;
- для получения линейного регулятора учитывают следующее рабочее требование:
- отклонение δPbank между текущим значением Pbank и контрольным значением Pbank,ref составляет от  до
до  ; следует соблюдать по меньшей мере для одного возмущения, которое является ступенью мощности, требуемой от турбины или турбин, с ±Р% от номинальной мощности PN ядерного реактора, при этом Р составляет от 5 до 15%;
; следует соблюдать по меньшей мере для одного возмущения, которое является ступенью мощности, требуемой от турбины или турбин, с ±Р% от номинальной мощности PN ядерного реактора, при этом Р составляет от 5 до 15%;
- указанное рабочее требование или указанные рабочие требования переводят в следующее цифровое условие:
-  ≤ 1, где
≤ 1, где  является функцией перехода между указанной ступенью мощности и δPbank, при
является функцией перехода между указанной ступенью мощности и δPbank, при  , ΔPmax=P%.PN;
, ΔPmax=P%.PN;
- для получения линейного регулятора учитывают следующее рабочее требование:
- возмущение, которое является ступенью мощности, требуемой от турбины или турбин, с ±Р% от номинальной мощности PN ядерного реактора, при этом Р составляет от 5 до 15%, приводит к минимальному изменению рабочих параметров; при этом указанное требование переводят в следующее цифровое условие:
- minK∈Ω , где K обозначает матрицы коэффициентов усиления Kр и Ki, Ω обозначает совокупность матриц коэффициентов усиления, стабилизирующих систему с обратной связью,
, где K обозначает матрицы коэффициентов усиления Kр и Ki, Ω обозначает совокупность матриц коэффициентов усиления, стабилизирующих систему с обратной связью,  является функцией перехода между указанной ступенью мощности и вектором отклонения рабочих параметров, Wz является матрицей заранее определенного частотного взвешивания;
является функцией перехода между указанной ступенью мощности и вектором отклонения рабочих параметров, Wz является матрицей заранее определенного частотного взвешивания;
- каждая линеаризованная модель учитывает задержку, связанную с впрыском нейтронного поглотителя, с использованием следующих уравнений:
 ;
;  ;
; 
где Cb является концентрацией нейтронного поглотителя в первичном контуре или каждом первичном контуре; uQ является командой повышения концентрации нейтронного поглотителя в первичном контуре в результате команды впрыска нейтронного поглотителя с расходом Qbor;  является запаздывающей командой повышения концентрации нейтронного поглотителя в первичном контуре; s является переменной Лапласа; h является значением рассматриваемой задержки, как правило, составляющим от 100 до 500 секунд; n является целым числом, составляющим от 3 до 15;
является запаздывающей командой повышения концентрации нейтронного поглотителя в первичном контуре; s является переменной Лапласа; h является значением рассматриваемой задержки, как правило, составляющим от 100 до 500 секунд; n является целым числом, составляющим от 3 до 15;
- в определенной рабочей точке коэффициенты усиления матриц коэффициентов усиления Kр и Ki определяют при помощи алгоритма оптимизации таким образом, чтобы стабилизировать систему с обратной связью для указанной определенной рабочей точки и стабилизировать системы с обратной связью по меньшей мере для двух соседних определенных рабочих точек, одновременно стабилизируя цифровые условия, соответствующие всем рабочим требованиям;
- алгоритм опережающей коррекции супервизора использует указанную нелинейную модель ядерного реактора.
Вторым объектом изобретения является ядерный реактор, содержащий:
- активную зону и устройство регулирования рабочих параметров активной зоны причем эти рабочие параметры включают в себя по меньшей мере среднюю температуру активной зоны и осевой дисбаланс мощности, при этом ядерный реактор дополнительно содержит:
- орган считывания текущего значения по меньшей мере одной входной величины;
- орган считывания текущего значения вектора выходных величин, при этом выходные величины включают в себя по меньшей мере рабочие параметры;
- при этом устройство регулирования содержит:
- модуль формирования контрольного значения вектора выходных величин с использованием текущего значения по меньшей мере одной входной величины;
- супервизор, запрограммированный для формирования вектора значений команд ядерного реактора с применением алгоритма опережающей коррекции и с использованием по меньшей мере одного текущего значения указанной по меньшей мере одной входной величины и текущего значения вектора выходных величин;
- регулятор, запрограммированный для формирования вектора корректирующих значений команд ядерного реактора с применением алгоритма управления с последовательными коэффициентами усиления и с использованием текущего значения вектора выходных величин и контрольного значения вектора выходных величин;
- модуль формирования вектора скорректированных значений команд ядерного реактора с использованием вектора значений команд, сформированного супервизором, и вектора корректирующих значений команд, сформированного регулятором;
- модуль регулирования рабочих параметров ядерного реактора, управляющий приводами с использованием вектора (U) скорректированных значений команд.
Ядерный реактор может также иметь один или несколько нижеперечисленных отличительных признаков, рассматриваемых индивидуально или во всех возможных технических комбинациях:
- ядерный реактор содержит:
- бак;
- активную зону, содержащую множество ядерных топливных сборок и расположенную в баке;
- кластеры стержней управления реактивностью активной зоны и механизмы, выполненные с возможностью перемещать каждый кластер в направлении введения в активную зону или в направлении извлечения из активной зоны;
- первичный контур охлаждения активной зоны, в котором циркулирует первичный теплоноситель и который содержит холодную и горячую ветви, подсоединенные к баку, через которые первичный теплоноситель соответственно поступает в бак и выходит из бака;
- контур впрыска, выполненный с возможностью селективно впрыскивать в первичный теплоноситель нейтронный поглотитель или разбавитель без нейтронного поглотителя; при этом команды включают в себя по меньшей мере одну скорость перемещения кластеров управляющих стержней и по меньшей мере один расход впрыска нейтронного поглотителя или разбавителя;
- устройство регулирования выполнено с возможностью перемещать кластеры стержней группами, при этом одна или несколько групп объединены в первом комплексе, при этом команды включают в себя по меньшей мере одну скорость перемещения группы или групп первого комплекса;
- другие группы объединены во втором комплексе, при этом, кроме скорости перемещения групп первого комплекса, команды включают в себя по меньшей мере одну скорость перемещения групп второго комплекса;
- группы первого комплекса перемещаются последовательно;
- первый комплекс содержит только одну группу;
- рабочие параметры дополнительно включают в себя положение введения групп первого комплекса;
- ядерный реактор содержит одну или несколько турбин, питаемых паром через первичный контур, при этом указанная по меньшей мере одна входная величина является мощностью, требуемой от турбины или турбин ядерного реактора;
- мощность, выдаваемая турбиной или турбинами ядерного реактора, включает в себя мощность, запрограммированную в соответствии с заранее определенной программой, например, заранее определенной для периода длительностью по меньшей мере в одни сутки, и возмущение мощности, при этом контрольное значение вектора выходных величин вырабатывают, используя только указанную запрограммированную мощность;
- кроме рабочих параметров, выходные величины включают в себя температуру первичного теплоносителя в горячей ветви и тепловую мощность активной зоны;
- алгоритм управления с последовательными коэффициентами усиления включает в себя множество линейных регуляторов, каждый из которых определяют для определенной рабочей точки ядерного реактора, при этом указанные рабочие точки предпочтительно распределены таким образом, чтобы охватывать диапазон мощности ядерного реактора в пределах от 25% до 100% от номинальной мощности ядерного реактора;
- каждая рабочая точка характеризуется определенным положением введения первого комплекса групп;
- каждый линейный регулятор выражается следующим образом:
uK = Kp(s)y1 + Ki(s)y2 при у1=у и у2=z,
где Kр и Ki являются матрицами коэффициентов усиления, s является переменной Лапласа, у является вектором отклонения выходных величин между текущим значением вектора выходных величин и контрольным значением вектора выходных величин, z является вектором отклонения рабочих параметров между текущим значением вектора контролируемых рабочих параметров и контрольным значением вектора контролируемых рабочих параметров, и uK является вектором корректирующих значений команд.
Другие признаки и преимущества изобретения будут более очевидны из нижеследующего описания, представленного в качестве не ограничительного примера, со ссылками на прилагаемые фигуры, на которых:
Фиг. 1 - схема заявленного способа регулирования.
Фиг. 2 - схематичный вид ядерного реактора, в котором можно применять способ, показанный на фиг. 1.
Фиг. 3 - схема цикла введения групп первого комплекса для варианта способа регулирования, адаптированного на основе режима Т.
Фиг. 4 схематично иллюстрирует различие между регулятором с последовательными коэффициентами усиления и супервизором.
Фиг. 5 - схема алгоритма управления с последовательными коэффициентами усиления.
Фиг. 6 - схема этапа получения линейных регуляторов алгоритма управления с последовательными коэффициентами усиления.
Фиг. 7 - графическое отображение ступенчатого сигнала возмущения, используемого для этапа получения линейных регуляторов, показанных на фиг. 6.
Фиг. 8 схематично иллюстрирует вариант выполнения, в котором линейные регуляторы определены по каждой зоне.
Фиг. 9 - схема супервизора.
Фиг. 10 - графическое отображение изменения мощности, требуемой от турбины, когда реактор работает в режиме регулирования частоты.
Фиг. 11 - графическое отображение характеристик, полученных только при помощи супервизора в случае работы, показанной на фиг. 10.
Фиг. 12-19 - графическое отображение результатов, полученных при помощи заявленного способа для мощности, требуемой от турбины и образующей переход 100%-60%-100% PN при 5% PN/мин.
Фиг. 20-26 - графическое отображение результатов, полученных при помощи заявленного способа для мощности, требуемой от турбины и образующей нисходящую ступень мощности 100%-90% PN.
Фиг. 27-33 - графическое отображение результатов, полученных при помощи заявленного способа для мощности, требуемой от турбины и образующей переход 100%-70% PN при 5% PN/мин с регулированием частоты.
Способ, схематично показанный на фиг. 1, предназначен для регулирования рабочих параметров ядерного реактора 1, схематично показанного на фиг. 2.
Ядерный реактор 1 содержит:
- корпус реактора 3;
- активную зону 5, содержащую множество ядерных топливных сборок и расположенную в корпусе реактора 3;
- кластеры 7 управления реактивностью активной зоны и механизмы 9, выполненные с возможностью перемещать каждый кластер 7 в направлении введения в активную зону 5 или в направлении извлечения из активной зоны 5;
- первый контур 10 охлаждения активной зоны 5, в котором циркулирует первичный теплоноситель и который содержит холодную и горячую ветви 11, 13, подсоединенные к корпусу реактора 3, через которые первичный теплоноситель соответственно поступает в корпус реактора 3 и выходит из корпуса реактора 3;
- контур 15 впрыска, выполненный с возможностью селективно вводить в первичный теплоноситель нейтронный поглотитель или разбавитель без нейтронного поглотителя.
Обычно нейтронным поглотителем является бор. Разбавителем обычно является вода.
Как правило, первый контур 10 содержит одну или несколько петель, каждая из которых имеет горячую ветвь и холодную ветвь.
Ядерный реактор 1 содержит одну или несколько турбин 17, питаемых паром с помощью первого контура 10.
Как правило, ядерный реактор 1 является водо-водяным ядерным реактором (PWR). Он содержит парогенератор 19 для каждой петли первого контура 10. Каждая петля соединяет в виде замкнутой системы корпус реактора 3 с первичной стороной соответствующего парогенератора 19. Кроме того, ядерный реактор 1 содержит второй контур 21, соединяющий в виде замкнутой системы вторую сторону парогенератора или каждого парогенератора 19 с соответствующей турбиной 17. Турбина 17 вращает генератор 23 переменного тока.
В качестве варианта, первичный теплоноситель напрямую может вращать каждую турбину.
Ядерный реактор 1 содержит также систему 25 регулирования рабочих параметров активной зоны, обычно называемую Core Control, то есть «Контроль активной зоны». Система 25 регулирования содержит, например, блок обработки данных, состоящий из процессора и связанной с процессором памяти (не показаны). В варианте система 25 регулирования выполнена в виде программируемых логических компонентов, таких как FGPA (от английского Field-Programmable Gate Array), или в виде специальных интегральных схем, таких как ASIC (от английского Application-Specific Integrated Circuit).
Система 25 регулирования выполнена с возможностью перемещать кластеры 7 на основе функциональных групп. Кластеры одной и той же группы перемещаются вместе и всегда находятся в одинаковом положении введения.
Предпочтительно группы составляют один комплекс или распределены в несколько комплексов. Распределение групп и их использование зависят от способа управления ядерным реактором.
В некоторых способах управления в первом комплексе объединены несколько групп.
В этом случае группы первого комплекса обычно перемещаются последовательно. Это значит, что их вводят друг за другом с перекрыванием, которое определяют заранее, что будет описано ниже. В варианте перекрывание может меняться.
Согласно варианту выполнения изобретения, все группы первого комплекса перемещаются одновременно. Это значит, что они всегда находятся в одинаковом положении введения и перемещаются вместе.
В других способах управления первый комплекс содержит только одну группу.
В некоторых способах управления другие группы объединены во втором комплексе.
В этом случае группы второго комплекса обычно перемещаются вместе.
В других способах управления все группы объединены в первом комплексе, и второго комплекса не существует.
В других способах управления некоторые группы объединены в третий комплекс, предусмотренный дополнительно к первому и второму комплексам.
Во всех случаях система регулирования перемещает группы одного комплекса согласованно (последовательно, одновременно и т.д.). Система регулирования перемещает группы комплекса или каждого комплекса, чтобы управлять работой реактора, в частности, чтобы регулировать рабочие параметры.
Ниже следует подробное описание нескольких примеров управления, основанных соответственно на режимах Т, G и А.
В способе управления, основанном на режиме Т, адаптированном для реактора EPR (European Pressurized Reactor - Европейский реактор с водой под давлением), группы распределены в два комплекса:
- первый комплекс, называемый Pbank;
- второй комплекс, называемый Hbank.
Первый комплекс предназначен для контроля средней температуры Tm. Второй комплекс Hbank предназначен для контроля аксиального офсета (АО).
Первый и второй комплексы могут иметь изменяющийся состав, что будет пояснено ниже.
Например, кластеры 7 управляющих стержней объединены в 5 групп Р1-Р5.
Как показано на фиг. 3, группы Р1-Р5 образуют комплексы Pbank и Hbank следующим образом:
- при 100% номинальной мощности (NP) реактора Pbank состоит из Р1, а Hbank состоит из Р2-Р5. Pbank введен немного глубже, чем Hbank.
- Когда мощность уменьшается до 85%NР, Pbank опускают таким образом, чтобы регулировать среднюю температуру по ее контрольному значению. Понижение мощности приводит к изменению АО, который регулируется с помощью комплекса Hbank.
- Мощность продолжает понижаться. Когда расстояние между Р1 и Р2 становится равным максимальному промежутку между двумя группами кластеров (половина высоты активной зоны), Р2 отсоединяется от группы Hbank и переходит в группу Pbank. При этом она опускается вместе с Р1.
- Когда мощность продолжает понижаться, Pbank продолжает опускаться. Когда максимальное расстояние между Р2 и Р3 оказывается достигнутым, Р3 переходит в Pbank и опускается, и так далее с Р4.
Последовательность будет такой же, если кластеры управляющих стержней будут объединены в другое число групп.
Таким образом, группы первого комплекса Pbank перемещаются последовательно. Группы второго комплекса Hbank перемещаются вместе.
Под положением первого комплекса Pbank в данном случае следует понимать совокупное положение групп, принадлежащих к первому комплексу. Это положение обозначено Pbank.
Например, положение Pbank вычисляют при помощи следующего уравнения:
Pbank = min(P4,214) + min (P3,214) + min(P2,214) + P1,
где Р1, Р2, Р3 и Р4 обозначают соответственно положения групп Р1-Р4. Значение 214 выбирают для положения групп кластеров в середине активной зоны. Положение выражают в виде количества шагов извлечения, начиная от положения максимального введения групп.
В данном случае под положением второго комплекса Hbank следует понимать положение группы Р5, которая никогда не входит в первый комплекс Pbank.
Во втором способе управления, основанном на режиме G, группы распределены в два комплекса:
- первый комплекс содержит только одну группу R, образованную черными кластерами, то есть кластерами из стержней с очень высокой степенью поглощения;
- второй комплекс, называемый GCP или группой компенсации мощности, образован группами G1 и G2 (G обозначает серые кластеры) и группами N1 и N2 (N обозначает черные кластеры). Серые кластеры являются менее поглощающими, чем черные кластеры.
Группы этого второго комплекса вводят последовательно. Предпочтительно их вводят в зависимости от требующейся электрической мощности, обеспечиваемой турбиной.
В этом втором способе управления предпочтительно АО контролируют в основном посредством ввода нейтронного поглотителя или разбавителя.
В третьем способе управления, основанном на режиме А, все функциональные группы объединены в первом комплексе, в данном случае обозначаемом аббревиатурой DCBA.
Обычно он состоит из четырех групп А, В, С и D, которые вводят последовательно, как Pbank.
Первый комплекс предназначен для контроля средней температуры Tm.
В этом третьем способе управления предпочтительно АО контролируют в основном посредством ввода нейтронного поглотителя или разбавителя.
Контролируемые рабочие параметры включают в себя по меньшей мере среднюю температуру Tm активной зоны и аксиальный офсет нейтронной мощности АО.
Среднюю температуру Tm активной зоны в данном случае определяют как среднее значение между Тf и Tc, при этом Tf и Тс являются значениями температуры первичного теплоносителя на выходе активной зоны 3 и на входе активной зоны 3, то есть в горячей и холодной ветвях 13 и 11.
Когда первый контур содержит несколько петель, то рассматривают, например, среднее значение температур горячих и холодных ветвей этих первых контуров.
Аксиальный офсет нейтронной мощности АО выражается в виде следующего отношения:
АО = (FH - FB)/(FH+FB),
где FH и FB являются нейтронными потоками соответственно в верхней и нижней частях активной зоны.
Предпочтительно контролируемые рабочие параметры дополнительно включают в себя положение Pbank групп первого комплекса.
Этот случай является типичным по меньшей мере для первого способа управления реактором.
Это соответствует контролю рабочего параметра Pmax, то есть максимальной мощности, которая может быть достигнута посредством быстрого извлечения групп в их положение максимального извлечения.
В действительности, предпочтительно параметр Pmax выражается в контрольном положении группы Pbank, которое позволяет скомпенсировать недостаток мощности. Таким образом, контроль Pmax представляет собой контроль положения группы Pbank в соответствии с определенным профилем введения, определяемым в зависимости от мощности активной зоны и от мощности, к которой оператор хотел бы иметь возможность возврата. Например, Pmax со значением 100%PN означает, что положение группы Pbank позволяет вернуться к 100%PN только посредством ее извлечения.
Для второго и третьего способов управления реактором положение Pbank групп первого комплекса обычно не входит в контролируемые рабочие параметры. Они включают в себя только Tm и АО.
Способ регулирования учитывает по меньшей мере одну входную величину и несколько выходных величин, как показано на фиг. 1.
Входную величину определяют как расчетную траекторию, либо как дополнительное требование или изменение требования, применяемое к способу регулирования.
Указанная по меньшей мере одна входная величина, как правило, является требуемой мощностью, которую должна вырабатывать турбина или турбины ядерного реактора.
Как правило, мощность, выдаваемая турбиной или турбинами 17 ядерного реактора, включает в себя две составляющие: запрограммированную мощность DU в соответствии с заранее определенной программой и возмущение dp мощности. Например, запрограммированную мощность определяют для периода по меньшей мере в одни сутки. Возмущение мощности соответствует, например: регулированию, выполненному в работе первого контура или в работе второго контура; ступени резервной нагрузки и т.д.
Согласно варианту осуществления изобретения, под мощностью, требуемой от турбины или турбин ядерного реактора, следует понимать запрограммированную мощность DU.
Согласно другому варианту осуществления изобретения, под мощностью, требуемой от турбины или турбин ядерного реактора, следует понимать вырабатываемую мощность DP, где DP=DU + dp.
Указанная по меньшей мере одна входная величина в варианте осуществления изобретения включает в себя одну или несколько нижеперечисленных входных величин, в дополнение или вместо требуемой мощности турбины или турбин:
- запрограммированное максимальное введение группы Pbank;
- расширение допустимой области изменения физического параметра, такого как средняя температура активной зоны или аксиальный офсет мощности АО;
- ухудшение характеристик приводов (скорость введения управляющих групп, расход впрыска бора или дистиллированной воды).
Этот список не является ограничительным.
Предпочтительно, кроме рабочих параметров, выходные величины включают в себя температуру Тс первичного теплоносителя в горячей ветви 13 и тепловую мощность Pk активной зоны.
Для обеспечения регулирования ядерный реактор 1 содержит:
- блок 27 сбора данных текущего значения указанной по меньшей мере одной входной величины;
- блок 29 сбора данных текущего значения вектора выходных величин.
Ядерный реактор 1 содержит систему управления, оснащенную набором датчиков, позволяющих получать текущие значения следующих величин: Тс, Tf, АО, мощности Pk активной зоны и Pbank.
Система управления может также выдавать DU и оснащена датчиками, позволяющими получать DP.
Блок 27 сбора данных выполнен с возможностью получать текущее значение мощности, требуемой от турбины или турбин, непосредственно от системы управления.
Блок 29 сбора данных выполнен с возможностью получать непосредственно от системы управления текущие значения некоторых выходных величин, в частности, Тс, АО, РК и Pbank. Блок 29 сбора данных выполнен с возможностью вычислять текущие значения других выходных величин на основании значений, выдаваемых системой управления, в частности, Tm.
Блоки 27 и 29 сбора данных являются, например, модулями системы 25 регулирования или напрямую обслуживают систему 25 регулирования.
В рамках способа регулирования рабочие параметры регулируют посредством подачи команд на приводы.
Предпочтительно эти команды включают в себя по меньшей мере одну скорость Vbarres перемещения кластеров управляющих стержней и по меньшей мере один расход впрыска нейтронного поглотителя или разбавителя.
В некоторых способах управления (например, в первом способе управления) указанная по меньшей мере одна скорость Vbarres перемещения обычно включает в себя скорость перемещения групп первого комплекса Pbank и скорость перемещения групп второго комплекса Hbank.
Эти скорости соответствуют производным во времени определенного выше положения первого комплекса Pbank и определенного выше положения второго комплекса Hbank.
Эти скорости обозначаются соответственно vPbank и vHbank.
В других способах управления (например, во втором и третьем способах управления) указанная по меньшей мере одна скорость Vbarres перемещения кластеров управляющих стержней, как правило, соответствует скорости перемещения групп первого комплекса.
Расход впрыска нейтронного поглотителя или разбавителя обычно выражают в виде степени изменения концентрации нейтронного поглотителя в первичном теплоносителе, обозначаемой uQ. В других случаях ее выражают в виде массового расхода впрыска в первичный теплоноситель и обозначают Qbor или Qdil.
Команды вырабатываются системой 25 регулирования, которая передает их на приводы. Приводы представляют собой механизмы 9 приведения в движение кластеров стержней и контур 15 впрыска нейтронного поглотителя или разбавителя.
Способ регулирования разработан таким образом, чтобы соблюдать требования технической инструкции, то есть выполнять множество задач. Эти требования будут описаны ниже только для первого способа управления.
Система Core Control ограничена в своей работе допустимой рабочей областью, в которой необходимо поддерживать отклонения рабочих параметров по отношению к их контрольным значениям. Эта область определена операционными границами работы (Limiting Condition Operation - LCO), то есть верхними и нижними пределами для каждого контролируемого рабочего параметра (а именно Tm, АО и Pbank) относительно их контрольных значений.
Эти контрольные значения определены как:
Tm,ref контрольное значение средней температуры
AOref контрольное значение АО
Pbank,ref контрольное значение положения группы Pbank.
Отклонение контролируемых параметров относительно их контрольных значений:
ΔTm отклонение средней температуры относительно ее контрольного значения
ΔAO отклонение АО относительно его контрольного значения
Δ Pbank отклонение положения Pbank относительно его контрольного значения.
При этом определяют следующие пределы области работы:



Типичными значениями для этих параметров, например, являются:
Система Core Control должна обеспечивать соблюдение реактором требований гибкости, например, таких как:
Адаптация к изменению суточного запроса (мониторинг нагрузки)
Переходы нагрузки: ±5%/мин PN между 25% и 100% PN
Адаптация к изменению запроса в реальном времени (регулирование частоты):
Первичная: ±5% PN при 1%/с
Вторичная: ±5% PN при 1%/мин
Адаптация к возмущениям сети (оборотный резерв)
Ступень: ±10% PN между 30% и 100% PN.
Задачей системы Core Control является удержание контролируемых выходных величин в вышеуказанной допустимой рабочей области при любых вышеуказанных изменениях мощности.
Допустимые максимальные воздействия определены следующим образом:
Насыщение кластеров управляющих стержней в положениях:
Минимальное положение:  = 0 шагов извлечения
= 0 шагов извлечения
Максимальное положение:  = 410 шагов извлечения
= 410 шагов извлечения
Минимальная скорость:  = 4 шага/мин
= 4 шага/мин
Максимальная скорость: = 75 шагов/мин
Максимальные и минимальные расходы впрыска нейтронного поглотителя/разбавителя:
Минимальный расход нейтронного поглотителя:  = 1 кг/с
= 1 кг/с
Максимальный расход нейтронного поглотителя: = 3 кг/с
Минимальный расход разбавителя:  = 1 кг/с
= 1 кг/с
Максимальный расход разбавителя:  = 10 кг/с
= 10 кг/с
Минимальная концентрация:  = 0 частей на миллион
= 0 частей на миллион
Регулятор должен иметь гарантии надежности:
Минимальный запас модуля: Mm = 0.5.
Контрольные значения контролируемых выходных величин зависят от работы активной зоны. Их определяют следующим образом:
Контрольная температура Tm,ref является функцией мощности ядерного реактора. Ее считывают непосредственно на заранее определенной кривой в зависимости от мощности, требуемой от турбины или турбин. В данном случае рассматриваем как текущее значение указанной по меньшей мере одной входной величины.
Контрольный аксиальный офсет мощности AOref периодически обновляют, например, каждый месяц, чтобы учитывать истощение активной зоны. Его вводит напрямую оператор ядерного реактора, и он считается постоянным между двумя обновлениями.
Контрольное положение Pbank,ref комплекса Pbank является функцией мощности ядерного реактора. Его считывают непосредственно по заранее определенной кривой в зависимости от мощности, требуемой от турбины или турбин. Это контрольное положение приводится в виде суммарного положения.
Далее следует подробное описание способа регулирования рабочих параметров для первого способа управления.
Этот способ предусмотрен таким образом, чтобы учитывать специфику управления активной зоной ядерного реактора.
Реактор имеет разнородные, то есть одновременно медленные и быстрые характеристики динамики. Динамика, связанная с ксеноном, является очень медленной (порядка часа), тогда как динамика, связанная с мощностью и температурой является быстрой (порядка десятка секунд).
Во всей рабочей области поведение активной зоны является исключительно нелинейным, в основном по причине введения групп кластеров стержней в активную зону. Влияние групп кластеров стержней на различные контролируемые рабочие параметры сильно меняется между максимальной мощностью (100%PN) и промежуточной мощностью (например, 60%PN). В некоторых зонах активной зоны наблюдается также изменение действия приводов на обратное.
Привод нейтронного поглотителя, рассматриваемый в задаче управления, имеет большую задержку: 300 секунд. Хотя система, которую необходимо контролировать, является относительно медленной (общий порядок величины: 10 секунд), задержка этой продолжительности является определяющей для регулирования.
Вышеупомянутые технические требования включают в себя большое число требований, в том числе требования по времени, которые часто трудно учитывать при применении традиционных методов управления.
В настоящее время каждая установка для производства электроэнергии получает ежедневную программу изменения нагрузки. Следовательно, эта программа известна заранее. Однако в настоящее время этот сигнал не используют для прогнозирования будущих команд. В рамках настоящего способа управления можно рассматривать будущие изменения этого сигнала для формирования команды.
Чтобы противостоять вышеуказанным трудностям, в рамках способа регулирования применяют иерархическую стратегию управления.
Способ содержит следующие этапы:
- получение текущего значения DU, DP по меньшей мере одной входной величины;
- получение текущего значения Y вектора выходных величин;
- формирование контрольного значения Yref вектора выходных величин с использованием текущего значения DU, DP указанной по меньшей мере одной входной величины;
- формирование вектора US значений команд ядерного реактора при помощи супервизора 31, применяющего алгоритм опережающей коррекции, с использованием по меньшей мере указанного текущего значения DU, DP указанной по меньшей мере одной входной величины и текущего значения Y вектора выходных величин;
- формирование вектора uK корректирующих значений команд ядерного реактора при помощи регулятора 33, применяющего алгоритм управления с последовательными коэффициентами усиления, с использованием текущего значения Y вектора выходных величин и контрольного значения Yref вектора выходных величин;
- формирование вектора U скорректированных значений команд ядерного реактора с использованием вектора US значений команд, сформированного супервизором 31, и вектора uK корректирующих значений команд, сформированного регулятором 33;
- регулирование рабочих параметров ядерного реактора путем управления приводами с использованием вектора uK скорректированных значений команд.
Как было указано выше, указанная по меньшей мере одна входная величина обычно является мощностью, требуемой от турбины или турбин. Она обычно соответствует запрограммированной мощности Du, получаемой, например, из заранее известной программы мониторинга нагрузки.
Альтернативно, речь идет о реальной мощности турбины, в данном случае обозначенной DP, получаемой при помощи следующего уравнения: DP = Du + dp.
Указанная по меньшей мере одна входная величина в варианте включает в себя одну или несколько из перечисленных выше входных величин в дополнение или вместо мощности, требуемой от турбины или турбин.
Предпочтительно контрольное значение Yref вектора выходных величин определяют только на основании запрограммированной мощности Du. Следовательно, контрольные значения Yref не изменяются при изменениях мощности, которые считаются случайными, то есть зависят от dp.
Контрольное значение Yref вектора выходных величин является следующим:
Yref = (Tc,ref Tm,ref AOref  Pbank,ref)T
Pbank,ref)T
Tc,ref является контрольной температурой горячей ветви. Ее считывают на заранее определенной кривой, получая напрямую Tc,ref в зависимости от текущего значения по меньшей мере одной входной величины.
Tm,ref , AOref и Pbank,ref определяют, как было описано выше.
является контрольной мощностью активной зоны. Ее считают равной мощности, требуемой от турбины или турбин.
Вектор U скорректированных команд, то есть команд, подаваемых на приводы, получают путем сложения вектора US значений команд, сформированного супервизором 31, и вектора uK корректирующих значений команд, сформированного регулятором 33: U = US + uK.
Текущее значение Y вектора выходных величин является следующим:
Y = (Tc Tm AO PK Pbank)T
Y получают, как было описано выше.
Супервизор 31 рассматривает на входе вектор у, который определяют как отклонение между текущим значением Y вектора выходных величин и контрольным значением Yref вектора выходных величин:
y = Y - Yref, при y = (δTc δTm δAO δPK δPbank)T
Регулятор 33 с последовательными коэффициентами усиления выполняет следующие задачи, позволяющие:
- Обеспечивать тщательный контроль системы, априори обеспечивая хорошие характеристики вокруг каждой рабочей точки, в частности, для устранения возмущений, связанных с регулированием частоты.
- Контролировать реактор во всей области работы, благодаря адаптации коэффициентов усиления, образующих эту область, по ходу работы.
- Гарантировать надежность (многоцелевой подход) локально вокруг рабочих точек.
- Учитывать большое число требований управления, указанных в технической инструкции.
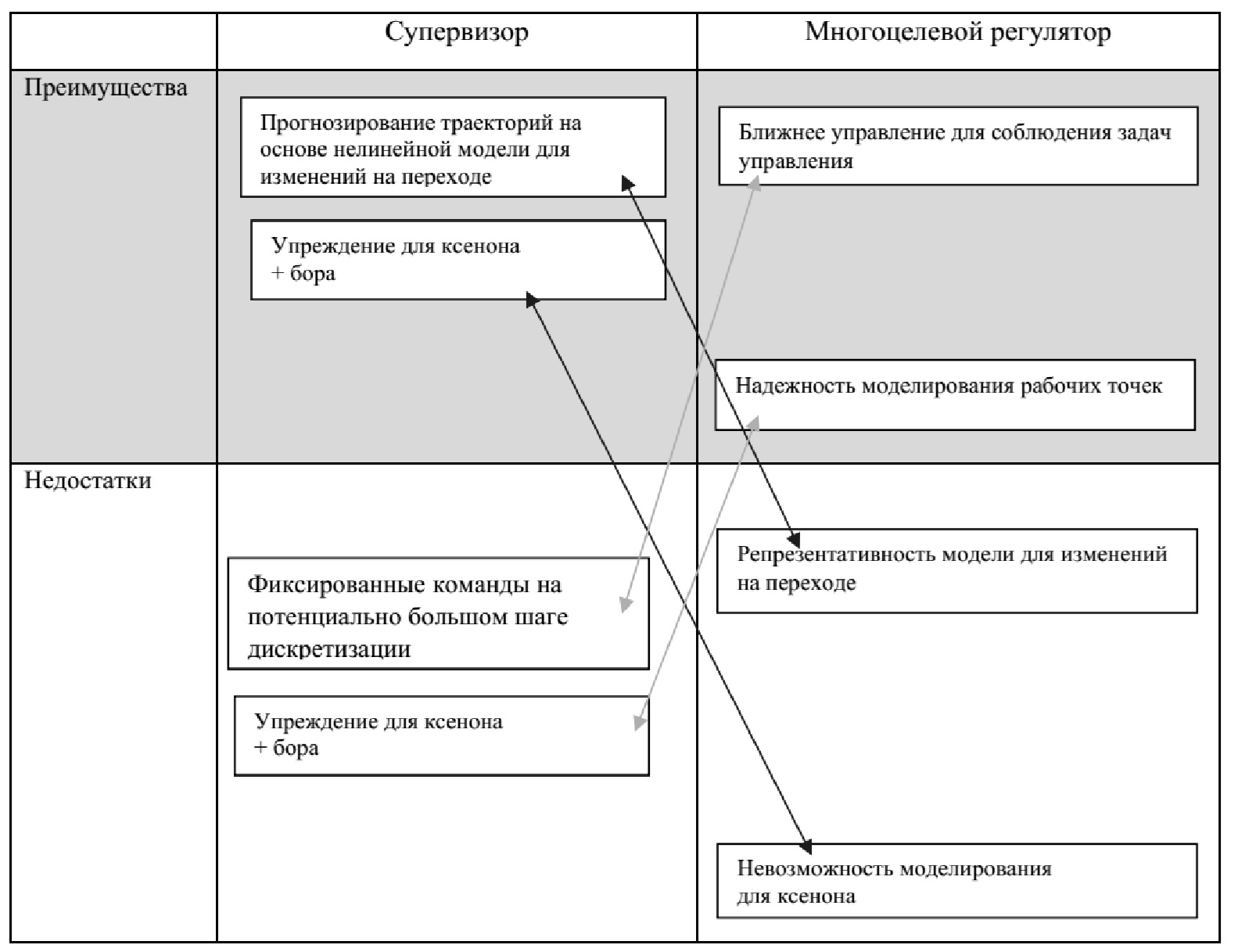
Однако для систем, характеризующихся значительной нелинейностью, как в данном случае, регулятор с последовательными коэффициентами усиления может иметь посредственную эффективность. Действительно, его синтезируют в каждой рабочей точке на основе линеаризованной модели. Однако использование линеаризованной модели может в недостаточной степени отражать общую нелинейную модель. Недостатком является то, что траектории, рассматриваемые этим регулятором, могут проходить далеко от оптимальной траектории общего поведения. На фиг. 4 приведено сравнение траектории, проходимой регулятором с последовательными коэффициентами усиления, с траекторией, рассматриваемой алгоритмом опережающей коррекции (сплошная линия). Здесь показано, что регулятор с последовательными коэффициентами усиления не учитывает общие требования для мониторинга траекторий, как это происходит при управлении с опережающей коррекцией.
Регулятор с последовательными коэффициентами усиления является структурированным регулятором, предпочтительно многовариантного типа PI.
Предпочтительно задание последовательности для регулятора отталкивается от положения первого комплекса Pbank. Иначе говоря, регулятор 31 включает в себя набор линейных регуляторов, каждый из которых определяют для заранее определенной рабочей точки, то есть для заранее определенного положения введения первого комплекса Pbank.
Модель ядерного реактора, используемая для синтезирования линейных регуляторов, называемых также LTI (Linear Time Invariant - линейными с постоянными параметрами), является нелинейной моделью точки, линеаризуемой вокруг заранее определенных рабочих точек. Она не моделирует ксенон. Действительно, поскольку ксенон является очень медленным относительно изменений других состояний, в задачу многоцелевого регулятора не входит его упреждение, и эту задачу выполняет супервизор.
Кроме того, ее синтезируют на всех локальных регуляторах LTI. Следовательно, она не обладает хорошей репрезентативностью нелинейной модели при больших амплитудах изменений мощности (то есть изменений нагрузки).
Супервизор 31 применяет алгоритм опережающей коррекции, используя такую же нелинейную модель точки реактора, которую используют для синтезирования линейных регуляторов регулятора 33. Этот метод управления обеспечивает выполнение большого числа упомянутых выше задач:
- Он сочетает в себе одновременно способность контроля системы при любых динамиках (медленных: ксенон, и/или быстрых: температура), используя потенциально нелинейную модель системы.
- Он позволяет учитывать задержки, причем даже значительные, в частности, впрыск нейтронного поглотителя.
- Кроме того, зная заранее программу мониторинга нагрузки DU, он упреждает поведение, вычисляя оптимальные траектории с учетом программы.
- Наконец, траектории регулятора будут оптимизированными для общего поведения системы, а не локально, как в случае использования только регулятора с последовательными коэффициентами усиления.
Однако как любой нелинейный алгоритм опережающей коррекции с конечным горизонтом:
- Он не обеспечивает гарантий надежности.
- Он вычисляет фиксированные команды на определенном горизонте времени, называемом «шагом дискретизации». В зависимости от имеющихся вычислительных мощностей, от горизонта прогнозирования и от сложности используемой модели этот шаг дискретизации может быть большим. В этом случае супервизор не сможет адаптировать свои команды для устранения возможных непредвиденных возмущений. Действительно, если эти возмущения являются более быстрыми, чем шаг дискретизации, супервизор, имеющий фиксированные команды на этом шаге, не сможет адаптировать свои команды достаточно быстро, чтобы устранить возмущения. В данном случае проблему могут создавать изменения мощности, связанные с регулированием частоты. Действительно, эти изменения является случайными и быстрыми.
Таким образом, главной идеей изобретения является объединение алгоритма опережающей коррекции и многоцелевого регулятора с последовательными коэффициентами усиления. Преимущества одного позволяют по меньшей мере частично компенсировать слабости другого, что наглядно показано в таблице ниже.
Таким образом, алгоритм управления с последовательными коэффициентами усиления регулятора 33 включает в себя множество линейных регуляторов, каждый из которых определен для определенной рабочей точки ядерного реактора.
Указанные рабочие точки распределены таким образом, чтобы охватывать диапазон мощности ядерного реактора от 25% до 100% номинальной мощности ядерного реактора.
В первом варианте управления каждая рабочая точка характеризуется определенным положением введения Pbank первого комплекса групп, как правило, характеризующегося исключительно положением Pbank.
В варианте каждая рабочая точка характеризуется одним или несколькими нижеследующими физическими параметрами в дополнение или вместо определенного положения введения Pbank первого комплекса групп:
- уровень мощности реактора;
- положение введения группы Hbank;
- концентрация бора;
- температура первичного теплоносителя на входе и на выходе активной зоны;
- расход первичного теплоносителя.
В данном примере каждый линейный регулятор имеет следующий вид, как показано на фиг. 5:
uK = K(s).y = Kp(s)y1 + Ki(s)y2 при y1=y и y2=z,
где Kр и Ki являются матрицами коэффициентов усиления, s является переменной Лапласа, у является вектором отклонения выходного значения между текущим значением Y вектора выходных величин и контрольным значением Yref вектора выходных величин, z является вектором отклонения рабочих параметров между текущим значением вектора контролируемых рабочих параметров и контрольным значением вектора контролируемых рабочих параметров, и uK является вектором корректирующих значений команд.
Различные векторы имеют следующий вид:
Таким образом, матрицы Kр и Ki определяют следующим образом:
 и
и 
Способ содержит этап получения линейных регуляторов, включающий в себя для каждого линейного регулятора следующие подэтапы:
- формирование линеаризованной модели ядерного реактора посредством линеаризации нелинейной модели ядерного реактора в соответствующей рабочей точке, при этом линеаризованная модель связывает:
- вектор у отклонения выходной данной и вектор z отклонения рабочих параметров, с одной стороны, с
- по меньшей мере одной из следующих величин: возмущение dp указанной по меньшей мере одной входной величины, возмущение dU вектора скорректированных значений команд, возмущение dy вектора у отклонения выходной величины и вектора uK корректирующих значений команд, с другой стороны;
при этом линеаризованная модель и линейный регулятор образуют систему с обратной связью для указанного положения введения (показана на фиг. 6);
- определение требований к работе ядерного реактора, соблюдаемых для заранее определенных возмущений dp указанной по меньшей мере одной входной величины или заранее определенных возмущений dU вектора U скорректированных значений команд, или заранее определенных возмущений dy вектора y отклонения выходной данной;
- перевод каждого рабочего требования в цифровое условие, соблюдаемое для функции перехода между:
- возмущением dp указанной по меньшей мере одной входной величины DU или возмущением dU вектора U скорректированных значений команд, или возмущением dy вектора y отклонения выходной данной, с одной стороны, и
- либо отклонением между текущим значением одного из рабочих параметров и контрольным значением указанного рабочего параметра, либо отклонением между текущим значением одной из выходных величин и контрольным значением указанной выходной данной, либо одним из корректирующих значений команд, с другой стороны;
- определение коэффициентов усиления матриц коэффициентов усиления Kр и Ki, при этом указанные коэффициенты усиления определяют при помощи алгоритма оптимизации таким образом, чтобы стабилизировать по меньшей мере систему с обратной связью для соответствующего положения введения и соблюсти цифровые условия, соответствующие всем рабочим требованиям.
Как правило, алгоритм оптимизации не является гладким.
Нелинейная модель ядерного реактора является следующей:








где 

и 
Задержка на нейтронном поглотителе выражается следующим отношением:
 = uQ(t-hbore), где hbore является постоянной задержки.
= uQ(t-hbore), где hbore является постоянной задержки.
τAO Постоянная времени АО
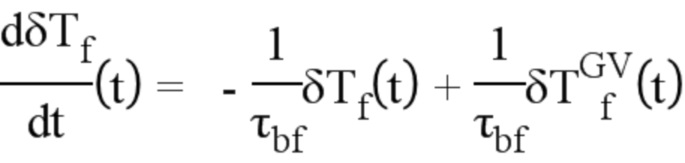
τbc Постоянная времени горячей ветви
τbf Постоянная времени холодной ветви
τco Постоянная времени активной зоны
τGV Постоянная времени GV
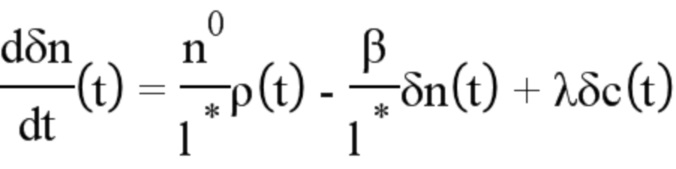
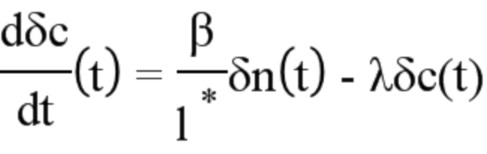
c Концентрация первичных частиц в активной зоне
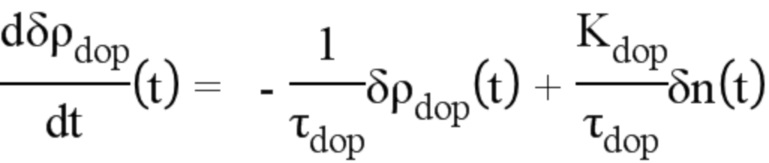
Cb Концентрация бора
Cp Массовая теплоемкость воды первичного контура
Kn Коэффициент преобразования мощности
n Плотность нейтронов в активной зоне
Qp Расход воды первичного контура
 Температура горячей ветви на уровне GV
Температура горячей ветви на уровне GV
 Температура холодной ветви на уровне GV
Температура холодной ветви на уровне GV
Запаздывающая команда для бора
ρ Реактивность



 Kdop Kc Kf KP KH KCB являются коэффициентами, которые меняются в зависимости от состояния активной зоны и приводят к нелинейностям.
Kdop Kc Kf KP KH KCB являются коэффициентами, которые меняются в зависимости от состояния активной зоны и приводят к нелинейностям.
Линеаризацию осуществляют при помощи любого соответствующего метода, например, производя разложение в ряд Тейлора уравнений, содержащих нелинейности вокруг рассматриваемых рабочих точек.
Модель, линеаризованная вокруг рабочей точки, имеет следующий вид:
 )
)






с коэффициентами, выделенными жирным шрифтом, в каждой рабочей точке. Эти уравнения образуют модель GLPV, показанную на фиг. 6.
Задержку впрыска нейтронного поглотителя аппроксимируют при помощи аппроксиманта Лагерра и определяют следующим образом:
= RB(s).uQ при RB(s) =  , где s является переменной Лапласа; h является значением задержки; n является целым числом. Обычно h составляет от 100 до 500 секунд, предпочтительно от 200 до 400 секунд и, например, равно 300 секунд. n обычно составляет от 3 до 15, и, например, его выбирают равным 9.
, где s является переменной Лапласа; h является значением задержки; n является целым числом. Обычно h составляет от 100 до 500 секунд, предпочтительно от 200 до 400 секунд и, например, равно 300 секунд. n обычно составляет от 3 до 15, и, например, его выбирают равным 9.
В комбинации с моделью GLPV эти уравнения образуют модель GR, показанную на фиг. 6, то есть линеаризованную модель ядерного реактора в рассматриваемой рабочей точке.
Модель GLPV можно выразить следующим образом:

где 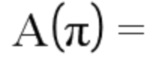




где состояние х определяют как x = (Tc Tf AO ρdop n c Pbank Hbank Cb),
вектор u входных величин определяют как u = (vPbank vHbank uQ)T ,
вектор d возмущений определяют как d = Pturb.
Возмущения и необходимые для соблюдения требования входят в вышеуказанные технические требования.
Перевод рабочих требований в цифровые условия, используемые для определения матриц коэффициентов усиления, требует перевода временного требования в частотное требование. Для этого определяют аппроксимант максимальной амплитуды выходного сигнала у переходной функции  в ответ на известное воздействие. Затем используют норму Н∞ перехода
в ответ на известное воздействие. Затем используют норму Н∞ перехода  , характеризующую его наихудший коэффициент усиления. На основании этого коэффициента усиления характеризуют максимальную амплитуду выходного сигнала в зависимости от амплитуды сигнала прямоугольной формы для определенного стабилизированного исходного состояния.
, характеризующую его наихудший коэффициент усиления. На основании этого коэффициента усиления характеризуют максимальную амплитуду выходного сигнала в зависимости от амплитуды сигнала прямоугольной формы для определенного стабилизированного исходного состояния.
Обычно учет временных критериев является сложной проблемой для задачи управления. В данном случае это является основным требованием задачи управления. Техническая инструкция определяет некоторые временные требования, которые следует соблюдать. Например, при любом сценарии средняя температура не должна превышать 1.5°С, то есть 
В рамках изобретения характеризуют максимальный выход за пределы некоторых параметров при известном воздействии с учетом стабилизированного исходного состояния. Возможные воздействия приведены в технической инструкции: переходы с 5%PN/мин, регулирование частоты или ступень мощности до 10%PN. В соответствии с экспертизой фирмы «Фраматом» наихудший сценарий (в наибольшей степени влияющий на регулирование) представляет собой ступень мощности, требуемой от турбины или турбин, в значении ±Р% номинальной мощности PN ядерного реактора, при этом Р составляет от 5 до 15%, например, Р равно 10%.
В данном случае выдвигается предположение, что, если система с обратной связью соблюдает технические требования по сценарию: ступень мощности Р%PN, то она соблюдает задачи управления во всех рассматриваемых случаях.
Рассмотрим сигнал возбуждения dP%, отображающий наихудший случай (ступень Р%). Аппроксимируем этот сигнал при помощи сигнала прямоугольной формы с периодом Т и амплитудой ΔPmax = P%PN, который в достаточной степени характеризует строб-импульс. Такой сигнал показан на фиг. 7 для ступени мощности в 10%PN при Т =100 секунд.
Разложим сигнал dP% на ряд Фурье и обозначим его s. Получаем известный результат для следующего строб-импульса:
s
где w= , и ΔPmax является амплитудой сигнала. Для упрощения ограничим исследование тремя первыми гармониками сигнала, которые предположительно являются достаточно репрезентативными. Пусть s будет разложением Фурье на третьей гармонике. В этом случае получаем:
, и ΔPmax является амплитудой сигнала. Для упрощения ограничим исследование тремя первыми гармониками сигнала, которые предположительно являются достаточно репрезентативными. Пусть s будет разложением Фурье на третьей гармонике. В этом случае получаем:

Если принять исходное состояние за нулевое (y(t=0)=0), амплитуда выходного сигнала s равна сумме амплитуд гармоник, умноженных на коэффициент усиления перехода, оцененный при импульсе каждой гармоники.
Максимальное усиление входного сигнала s при помощи переходной функции в худшем случае дает хороший аппроксимант максимальной амплитуды ymax выходного сигнала у. При этом получаем:
 × smax ~ ymax
× smax ~ ymax
где smax является максимальной амплитудой s. Однако, поскольку s является разложением сигнала dP% на ряд Фурье, то s~dP%, и следовательно,  . Поскольку необходимо получить Dmax, при котором ymax ≤ Dmax, то:
. Поскольку необходимо получить Dmax, при котором ymax ≤ Dmax, то:
× ΔPmax ≤ Dmax
Это уравнение используют в дальнейшем для выражения различных критериев Н∞, отображающих требования к команде. С его помощью мы можем переформулировать требования в математические критерии.
где
 является функцией перехода между возмущением вектора dU значений команд и вектором U скорректированных значений команд;
является функцией перехода между возмущением вектора dU значений команд и вектором U скорректированных значений команд;
du = (dvP dvH duQ)T является возмущением вектора значений команд, и
u = (vPbank vHbank uQ)T является вектором скорректированных значений команд;
WR является искомым запасом модуля, причем это значение определяют заранее, и оно равно, например, 0.5;
является функцией перехода между указанной ступенью мощности и δTm, при , ΔPmax=P%.PN;
где  является функцией перехода между указанной ступенью мощности и δАО, при , ΔPmax=P%.PN;
является функцией перехода между указанной ступенью мощности и δАО, при , ΔPmax=P%.PN;
где  является функцией перехода между указанной ступенью мощности и скоростью перемещения кластеров стержней, при ;
является функцией перехода между указанной ступенью мощности и скоростью перемещения кластеров стержней, при ;
где является функцией перехода между указанной ступенью мощности и расходом впрыска нейтронного поглотителя, при .
Предпочтительно для получения линейного регулятора учитывают также следующее рабочее требование:
- возмущение dp, которое является ступенью мощности, требуемой от турбины или турбин, с ±Р% от номинальной мощности PN ядерного реактора, при этом Р составляет от 5 до 15%, приводит к минимальному изменению рабочих параметров.
Указанное требование переводят в следующее цифровое условие:
- minK∈Ω , где K обозначает матрицы коэффициентов усиления Kр и Ki, Ω обозначает совокупность матриц коэффициентов усиления, стабилизирующих систему с обратной связью,
, где K обозначает матрицы коэффициентов усиления Kр и Ki, Ω обозначает совокупность матриц коэффициентов усиления, стабилизирующих систему с обратной связью,  является функцией перехода между указанной ступенью мощности dp и вектором z отклонения рабочих параметров, Wz является заранее определенной матрицей частотного взвешивания.
является функцией перехода между указанной ступенью мощности dp и вектором z отклонения рабочих параметров, Wz является заранее определенной матрицей частотного взвешивания.
Как было указано выше, z = (δTm δAO δPbank)T является вектором отклонения контролируемых рабочих параметров.
Как правило, матрицу частотного взвешивания Wz определяют как:
Взвешивания, выбираемые для каждого канала, определяют как:
 : частотное взвешивание для выходной данной средней температуры
: частотное взвешивание для выходной данной средней температуры
 : частотное взвешивание для выходной данной АО
: частотное взвешивание для выходной данной АО
 : частотное взвешивание для выходной данной Pbank.
: частотное взвешивание для выходной данной Pbank.
Их определяют следующим образом:
 ;
;  ;
; 
где K1, K2, K3, τ1, τ2 и τ3 являются заранее определенными коэффициентами.
В вышеуказанных уравнениях  символизирует норму Н∞, а
символизирует норму Н∞, а  символизирует норму Н2. Эти нормы определены, например, в работе J. M. Maciejowski, Multivariable Feedback Design, Addison-Wesley, 1989.
символизирует норму Н2. Эти нормы определены, например, в работе J. M. Maciejowski, Multivariable Feedback Design, Addison-Wesley, 1989.
По меньшей мере для первого способа управления, чтобы получить линейный регулятор, учитывают следующее рабочее требование:
- отклонение δPbank между текущим значением Pbank и контрольным значением Pbank,ref составляет от до .
Указанное рабочее требование переводят в следующее цифровое условие:
-  , где
, где  является функцией перехода между указанной ступенью мощности и δPbank, при , ΔPmax=P%.PN.
является функцией перехода между указанной ступенью мощности и δPbank, при , ΔPmax=P%.PN.
Кроме того, в первом варианте управления рабочим требованием для перемещения кластеров стержней является  ≤ 1,
≤ 1,
где  является функцией перехода между указанной ступенью мощности и скоростями перемещения комплексов Pbank и Hbank, при .
является функцией перехода между указанной ступенью мощности и скоростями перемещения комплексов Pbank и Hbank, при .
Определение коэффициентов усиления матриц коэффициентов усиления Kр и Ki осуществляют, используя метод негладкой оптимизации, наиболее подходящий для решения проблем управления. Используемым инструментом является, например, Systune фирмы Matlab. Этот инструмент имеет интегрированную полную окружающую среду, позволяющую выразить описанные выше требования Н2 и Н∞.
Согласно предпочтительному варианту, в определенном положении введения Pbank коэффициенты усиления матриц коэффициентов усиления Kр и Ki определяют при помощи алгоритма оптимизации таким образом, чтобы стабилизировать систему с обратной связью для указанного определенного положения введения и стабилизировать системы с обратной связью по меньшей мере для двух соседних определенных положений введения, соблюдая при этом цифровые условия, соответствующие всем рабочим требованиям (см. фиг. 8).
Например, коэффициенты усиления матриц коэффициентов усиления Kр и Ki определяют при помощи алгоритма оптимизации таким образом, чтобы стабилизировать систему с обратной связью для указанного определенного положения введения и стабилизировать системы с обратной связью для четырех определенных положений введения, расположенных рядом с определенным положением введения, с каждой стороны от этого положения.
Действительно, интерполяция синтезированных регуляторов LTI в разных рабочих точках может представлять определенную трудность, в частности, когда синтез двух регуляторов в двух соседних рабочих точках не позволяет получить регуляторы, достаточно близкие друг к другу. В этом случае интерполированный регулятор между этими двумя рабочими точками не обязательно представляет собой надежное решение, поскольку он может либо привести к нестабильности, либо может вызвать слишком резкие переходные явления во время смены коэффициентов.
Чтобы решить эту проблему, определение коэффициентов усиления в данной рабочей точки осуществляют, применяя мультимодельный подход для каждой зоны, как было указано выше. Получаемый в результате регулятор будет отвечать требованиям и будет оптимальным для всех рассматриваемых моделей.
Кроме того, оптимизированный регулятор в рабочей точке используют, чтобы инициализировать оптимизацию в соседней рабочей точке.
Наконец, изменение коэффициентов матриц регулятора необходимо, чтобы сохранить ее коэффициенты достаточно близкими к коэффициентам исходного регулятора (то есть соседнего регулятора).
При сценарии, соответствующем переходу мощности от 100% PN к 60% PN при скорости 5% PN/мин, регулятор 33 самостоятельно позволяет получить следующие характеристики:
 = 0.56°C ≤ 1.5°C;
= 0.56°C ≤ 1.5°C;  = 5.06%AO ~ 5%AO;
= 5.06%AO ~ 5%AO;  = 14.3PE ≤ 30 PE
= 14.3PE ≤ 30 PE
Эти характеристики являются корректными для Tm и Pbank, но находятся на пределе, допустимом для АО.
Далее следует описание супервизора 31.
Модель, используемая для супервизора, является описанной выше нелинейной моделью. Интерес в этой модели состоит в следующем:
- Моделируется эффект ксенона.
- Моделируется реальная задержка бора.
- Более высокая точность, чем у линеаризованной модели.
Уравнения модели были представлены выше. При этом модель, используемую супервизором, определяют следующим образом:
где xS является состоянием, US является сигналом контрольных команд, вычисленных супервизором, yS обозначает выходные данные, FS и GS являются функциями, определяющими изменение состояний и выходной данной в зависимости от входных величин и от состояния. Используя те же обозначения, что и раньше, получаем:


и

где VPbank, VHbank и UQ являются контрольными командами каждого привода, вычисленными супервизором.
В отличие от линеаризованной модели, где применяют аппроксимацию Лагерра для отображения задержки нейтронного поглотителя, эту задержку в данном случае представляют следующим образом:

где UQ обозначает команду нейтронного поглотителя, и hbore обозначает задержку нейтронного поглотителя. Например, задержка составляет 300 секунд.
Как правило, для регулирования супервизора выбирают следующие параметры:
Шаг дискретизации: TS = 100 (секунд)
Горизонт прогнозирования: Np = 10
Горизонт команды: Nc = 9
Вектор  команд на шаге (то есть за время j.TS), вычисленных при помощи алгоритма оптимизации, является таким, что:
команд на шаге (то есть за время j.TS), вычисленных при помощи алгоритма оптимизации, является таким, что:

База функций, используемая для команд, является базой постоянных кусковых функций. Это значит, что команды будут постоянными за период дискретизации и прерывистыми от одного шага дискретизации к другому.
На каждом шаге дискретизации супервизор оптимизирует Nc значений, определяя команды на каждом канале (Pbank, Hbank и расход бора). Получают следующую матрицу  команд, вычисленных на шаге дискретизации:
команд, вычисленных на шаге дискретизации:
Следовательно, на каждом дискретизации получаем:
Таким образом, все коэффициенты матрицы соответствуют переменным решения оптимизации. Наконец, на каждом шаге дискретизации j применяют первую вычисленную команду, обозначенную . При этом сигнал команд, применяемый к процессу и обозначенный US, изменяется непрерывно в соответствии со следующим отношением:

Рассматриваемая супервизором целевая функция вытекает из определенных выше задач эффективности. Задачей супервизора является вычисление контрольных команд для приводов Pbank, Hbank и нейтронного поглотителя, минимизирующих отклонение контролируемых параметров относительно их соответствующих контрольных значений.
Контролируемые параметры являются такими же, как и для регулятора 33:
Средняя температура, обозначаемая Tm.
Осевое распределение мощности, обозначаемое АО.
Положение первого комплекса Pbank, обозначаемое Pbank.
Контрольные значения этих параметров имеют обозначения Tm,ref, AOref и Pbank,ref. В этом случае отклонения δTm, δAO и δPbank относительно соответствующих контрольных значений контролируемых параметров представляют собой:


Целевую функцию строят следующим образом:
J = JU + JZ
В данном случае определяют 
Для упрощения записи обозначим 
При этом критерий для контроля JZ определяют следующим образом:

Критерий JU определяют при этом как:

где  ,
,  и KQ являются весовыми коэффициентами, и
и KQ являются весовыми коэффициентами, и  ,
,  и
и  являются фильтрованными входными данными команды. Последние фильтруют таким образом, чтобы подавить высокие частоты. Определяют HU фильтр высоких частот на командах и фильтрованные сигналы:
являются фильтрованными входными данными команды. Последние фильтруют таким образом, чтобы подавить высокие частоты. Определяют HU фильтр высоких частот на командах и фильтрованные сигналы:



где:
Критерий, определяемый вышеуказанными уравнениями, выраженный в дискретной области, где является вышеупомянутой матрицей команд, имеет следующий вид:

Кроме того, обозначив  вектор отклонений контролируемых выходных величин, оцененных на шаге дискретизации (то есть за время j.TS) в дискретной области, получаем:
вектор отклонений контролируемых выходных величин, оцененных на шаге дискретизации (то есть за время j.TS) в дискретной области, получаем:

Требования, задаваемые супервизору через задачу управления, вытекают из требований, сформулированных в технической инструкции и относящихся к воздействиям на привод. Особенностью супервизора 31 по сравнению с регулятором 33 является то, что он может специально учитывать формальные временные требования, независимо от того, касаются ли они входных величин или переменных состояния: в данном случае требования максимальных положения и скорости групп кластеров стержней, а также максимальные расходы разбавителя/бора.
При этом формулируют следующие требования на основании технической инструкции:
В рамках изобретения используют следующий алгоритм опережающей коррекции.
Модель, используемая для вычисления выходных величин модели в зависимости от команд (переменных решения), является нелинейной моделью. С учетом определенных выше требований и целевой функции для решения такой задачи необходим алгоритм нелинейной оптимизации требований. Например, используют алгоритм нелинейной оптимизации требований, основанный на методе внутренней точки, осуществляемом функцией fmicon фирмы Matlab.
Алгоритм супервизора представлен в виде принципиальной схемы на фиг. 9. На этой фигуре представлены различные применяемые функции, а также поток информации, которой они обмениваются на каждом шаге дискретизации. На каждом шаге дискретизации супервизор получает измерения Y от системы, контрольные значения Zref контролируемых выходных величин, а также профиль мощности турбины пользователя DU. Во время этого шага дискретизации:
- он обновляет значение вектора исходного состояния системы на шаге k, обозначаемого  (в данном случае предполагается, что воспроизводится полное состояние),
(в данном случае предполагается, что воспроизводится полное состояние),
- на основании входных величин он вычисляет последовательность оптимальных команд при помощи функции fmicon,
- между tj и tj + TS он применяет к реальной системе первый элемент последовательности команды, вычисленной за период дискретизации,
- он сохраняет в памяти остальную часть последовательности команд  для инициализации оптимизации следующего шага дискретизации,
для инициализации оптимизации следующего шага дискретизации,
- и, наконец, он сохраняет в памяти примененную (на шаге j) и обновляет запаздывающую команду  нейтронного поглотителя.
нейтронного поглотителя.
При сценарии, соответствующем переходу мощности от 100% PN к 60% PN при скорости 5% PN/мин, супервизор 31 самостоятельно позволяет получить следующие характеристики:
= 0.82°C ≤ 1.5°C; = 4.62%AO < 5%AO; = 22.97PE ≤ 30PE
Эти характеристики являются корректными для Tm и Pbank, но находятся на пределе, допустимом для АО.
На фиг. 11 показаны характеристики, полученные при помощи супервизора в случае регулирования частоты, где номинальная мощность следует кривой, показанной на фиг. 10.
На фиг. 11 видно, что супервизор сам не может устранить изменения мощности, связанные с регулированием частоты. Температура выходит за верхнюю и нижнюю границы, определенные технической инструкцией.
Ниже представлены результаты моделирования заявленного способа с применением иерархического управления и с использованием супервизора и многоцелевого регулятора с последовательными коэффициентами усиления, который будет называться RMOSC (контролируемый супервизором многоцелевой регулятор активной зоны).
Регулятор RMOSC моделируют на описанной выше нелинейной модели реактора. Чтобы соблюдать требования воздействия на приводы, для последних применяют насыщения в соответствии с максимальными воздействиями, определенными в технической инструкции.
Сначала поведение регулятора RMOSC проверяют на переходе нагрузки при 5%PN/мин от 100%PN до 60%PN с последующим повышением нагрузки от 60%PN до 100%PN с такой же скоростью. На втором этапе его проверяют для ступени мощности в 10%PN. Наконец, его проверяют в случае регулирования частоты, наложенного на переход нагрузки.
Кривые моделирования регулятора RMOSC для перехода мощности 100-60-100%PN при скорости 5%PN/мин представлены на фиг. 12-19.
В сценарии с переходом регулятор RMOSC выдает корректные результаты по отношению к критериям управления. Как показано, все регулируемые выходные величины остаются в допустимой области, определяемой LCO (предельные условия эксплуатации), то есть ни одна из выходных величин не переходит через соответствующие максимальные и минимальные пределы.
Во-первых, следует отметить отклонения средней температуры, АО и положения Pbank соответственно в 0.19°С, 2.9%АО и 6.7РЕ, которые составляют соответственно 12%, 58% и 22% максимальных отклонений, допустимых для этих переменных. Отмечается, что отклонение (в %) средней температуры меньше, чем для других переменных, в частности, благодаря частотному взвешиванию , в силу приоритетности средней температуры по отношению к другим выходным данным. Кроме того, моделирование показывает нулевую статическую погрешность.
Кроме того, ксенон полностью компенсируется и даже упреждается регулятором посредством изменений бора. Можно также отметить, что во время моделирования скорости приводов насыщаются. Следовательно, они не могут выходить за физические пределы реальных приводов.
Теперь сравним результаты регулятора RMOSC с результатами супервизора, применяемого самостоятельно. Отмечается, что отклонения регулируемых выходных величин отдельно взятого супервизора при одинаковом сценарии являются такими же, как и в случае регулятора RMOSC; в частности, поскольку в отличие от отдельно взятого супервизора регулятор RMOSC использует более строгий контроль. В данном случае наглядно проявляется интерес предложенной иерархической архитектуры.
Учитывая вышеуказанные элементы, можно сказать, что в этом сценарии регулятор RMOSC показывает высокую эффективность.
Кривые моделирования регулятора RMOSC для ступени мощности 100-90%PN показаны на фиг. 20-26.
Можно отметить отклонения средней температуры, АО и положения Pbank соответственно в 1.0°С, 5.09%АО и 19РЕ.
Выводы из этих результатов моделирования аналогичны выводам из предыдущего раздела, а именно:
- Все регулируемые выходные величины остаются в рассматриваемой допустимой рабочей области. Выход за пределы для АО является очень незначительным и в коротком промежутке времени, что вполне допустимо.
- Статическая погрешность является нулевой.
- Скорости и расход приводов являются насыщенными и, следовательно, отвечают соответствующим требованиям.
- Бор хорошо компенсирует изменение концентрации ксенона.
Представляющим интерес поведением регулятора RMOSC является введение Hbank во время изменения нагрузки, чтобы способствовать контролю средней температуры, после чего следует извлечение для обеспечения контроля АО.
Однако можно отметить, что в этом сценарии АО является более близким к допустимым пределам, чем в случае перехода нагрузки. Это объясняется тем, что рассматриваемый в данном случае сценарий считается самым сложным в рассматриваемой проблеме.
Наконец, учитывая вышеуказанные элементы, регулятор RMOSC выдает хорошие результаты, соответствующие спецификациям.
Кривые моделирования регулятора RMOSC для перехода мощности 100-70%PN при 5%PN/мин показаны на фиг. 27-33.
Можно отметить отклонения средней температуры, АО и положения Pbank соответственно в 0.47°С, 3.3%АО и 10.1РЕ.
Выводы из этих результатов моделирования аналогичны выводам из предыдущих разделов.
Далее следует описание технических требований инструкции и способа регулирования для второго способа управления.
Детально будут описаны только пункты, которыми технические требования и этот способ регулирования отличаются от первого способа управления.
Технические требования не включают в себя критерий для отклонения положения первого комплекса кластеров стержней.
Здесь тоже для каждой определенной рабочей точки регулирования определяют каждый из линейных регуляторов алгоритма управления с последовательными коэффициентами усиления. С другой стороны, каждая рабочая точка характеризуется мощностью, требуемой от турбины или турбин, и, как правило, только этой мощностью.
Командами являются только скорость первого комплекса (группа R), а также расход впрыска нейтронного поглотителя или разбавителя.
Контролируемые рабочие параметры включают в себя только среднюю температуру активной зоны и осевой дисбаланс мощности.
Кроме выходных величин, указанных для первого варианта выполнения, выходные величины включают в себя мощность, требуемую от турбины или турбин.
Далее следует описание технических требований инструкции и способа регулирования для третьего способа управления.
Детально будут описаны только пункты, которыми технические требования и этот способ регулирования отличаются от первого способа управления.
Технические требования не включают в себя критерий для отклонения положения первого комплекса кластеров стержней.
Командами являются только скорость первого комплекса, а также расход впрыска нейтронного поглотителя или разбавителя.
Контролируемые рабочие параметры включают в себя только среднюю температуру активной зоны и осевой дисбаланс мощности.
Кроме выходных величин, указанных для первого варианта выполнения, выходные величины включают в себя мощность, требуемую от турбины или турбин.
Согласно версии выполнения, которую можно применять для трех вариантов управления, задание последовательности регулятору производят с учетом других параметров, например, таких как глубина выгорания (burn-up) или циклы. Иначе говоря, коэффициенты усиления матриц коэффициентов усиления Kр и Ki меняются в зависимости от этих параметров. Для этого действуют таким же образом, строя линейные модели вокруг заранее определенных рабочих точек и интерполируя коэффициенты усиления. Однако рабочие точки характеризуются не одним параметром, а тремя параметрами, которые меняются. Этими параметрами являются, например, положение Pbank, глубина выгорания (burn-up) и цикл.
Вторым объектом изобретения является описанный выше ядерный реактор 1. Этот ядерный реактор содержит активную зону 5 и устройство 25 регулирования рабочих параметров активной зоны, причем эти рабочие параметры включают в себя по меньшей мере среднюю температуру активной зоны и осевой дисбаланс мощности.
Ядерный реактор 1 дополнительно содержит:
- блок 27 сбора данных для получения текущего значения по меньшей мере одной входной величины DU, DP;
- блок 29 сбора данных для получения текущего значения Y вектора выходных величин, при этом выходные величины включают в себя по меньшей мере рабочие параметры.
Система 25 регулирования содержит:
- модуль 35 формирования контрольного значения Yref вектора выходных величин с использованием текущего значения указанного по меньшей мере одного входного сигнала DU, DP;
- супервизор 31, запрограммированный для формирования вектора US значений команд ядерного реактора с применением алгоритма опережающей коррекции и с использованием по меньшей мере одного указанного текущего значения указанной по меньшей мере одной входной величины DU, DP и текущего значения Y вектора выходных величин;
- регулятор 33, запрограммированный для формирования вектора uk корректирующих значений команд ядерного реактора с применением алгоритма управления с последовательными коэффициентами усиления и с использованием текущего значения Y вектора выходных величин и контрольного значения Yref вектора выходных величин;
- модуль 37 формирования вектора U скорректированных значений команд ядерного реактора с использованием вектора US значений команд, сформированного супервизором 31, и вектора uk корректирующих значений команд, сформированного регулятором 33;
- модуль 39 регулирования рабочих параметров ядерного реактора, управляющий приводами с использованием вектора U скорректированных значений команд.
Как правило, ядерный реактор 1 содержит:
- корпус реактора 3;
- активную зону 5, содержащую множество ядерных топливных сборок и расположенную в корпусе реактора 3;
- кластеры 7 стержней управления реактивностью активной зоны 5 и механизмы 9, выполненные с возможностью перемещать каждый кластер 7 в направлении введения в активную зону 5 или в направлении извлечения из активной зоны 5;
- первый контур 10 охлаждения активной зоны 5, в котором циркулирует первичный теплоноситель и который содержит холодную и горячую ветви 11, 13, подсоединенные к корпусу реактора 3, через которые первичный теплоноситель соответственно поступает в корпус реактора 3 и выходит из корпуса реактора 3;
- контур 15 впрыска, выполненный с возможностью селективно впрыскивать в первичный теплоноситель нейтронный поглотитель или разбавитель без нейтронного поглотителя.
Как правило, нейтронный поглотитель является бором. Как правило, разбавитель является водой.
В этом случае команды предпочтительно включают в себя по меньшей мере одну скорость перемещения кластеров управляющих стержней и по меньшей мере один расход впрыска нейтронного поглотителя или разбавителя.
Обычно система 25 регулирования выполнена с возможностью перемещать кластеры 7 стержней группами. Кластеры одной группы перемещаются вместе и всегда находятся все в одинаковом положении введения.
Предпочтительно группы распределены в один или несколько комплексов. Распределение групп и их использование зависят от способа управления ядерным реактором.
В некоторых вариантах управления в первом комплексе объединены несколько групп.
В этом случае группы первого комплекса обычно перемещаются последовательно. Это значит, что их вводят одну за другой с перекрыванием, которое определяют заранее, как будет описано ниже. В варианте, перекрывание может меняться.
Согласно варианту выполнения, все группы первого комплекса перемещаются одновременно. Это значит, что все они всегда находятся в одинаковом положении введения и перемещаются вместе.
В других способах управления первый комплекс содержит только одну группу. В некоторых способах управления другие группы объединены во втором комплексе.
В этом случае группы второго комплекса обычно перемещаются одновременно.
В других способах управления все группы объединены в первом комплексе, а второго комплекса не существует.
Далее следует описание нескольких примеров управления, вытекающих соответственно из режимов Т, G и А.
В варианте управления, вытекающем из режима Т, предназначенного для реактора с водой под давлением EPR (European Pressurized Reactor), группы распределены на два комплекса:
- первый комплекс, называемый Pbank,
- второй комплекс, называемый Hbank.
Первый комплекс предназначен для контроля средней температуры Tm. Второй комплекс предназначен для контроля осевого дисбаланса мощности АО.
Группы первого комплекса Pbank перемещаются последовательно. Группы второго комплекса Hbank перемещаются одновременно.
Во втором варианте управления, вытекающем из режима G, группы распределены на два комплекса:
- первый комплекс содержит группу R, образованную черными кластерами, то есть исключительно поглощающими кластерами;
- второй комплекс, называемый GCP или группой компенсации мощности, образован группами G1 и G2 (G обозначает серые кластеры) и группами N1 и N2 (N обозначает черные кластеры). Серые кластеры являются менее поглощающими, чем черные кластеры.
Группы этого второго комплекса вводят последовательно. Предпочтительно их вводят в зависимости от требуемой электрической мощности, обеспечиваемой турбиной.
В этом втором способе управления предпочтительно АО контролируют в основном посредством впрысков нейтронного поглотителя или разбавителя.
В третьем способе управления, вытекающем из режима А, все функциональные группы объединены в первом комплексе, обозначаемом в данном случае аббревиатурой DCBA.
Он обычно состоит из четырех групп А, В, С и D, которые вводят последовательно, как и Pbank.
Первый комплекс предназначен исключительно для контроля средней температуры Tm.
В этом третьем способе управления АО предпочтительно контролируют в основном посредством впрысков нейтронного поглотителя или разбавителя.
В некоторых способах управления (например, в первом способе управления) указанная по меньшей мере одна скорость Vbarres перемещения кластеров управляющих стержней обычно включает в себя скорость перемещения групп первого комплекса Pbank и скорость перемещения групп второго комплекса Hbank. Эти скорости обозначаются vPbank и vHbank соответственно.
В других способах управления (например, во втором и третьем способах управления) указанная по меньшей мере одна скорость Vbarres перемещения кластеров управляющих стержней обычно соответствует скорости перемещения групп первого комплекса.
Система 25 регулирования выполнена с возможностью осуществления описанного выше способа регулирования.
В частности, супервизор 31 и регулятор 33 выполнены, как было описано выше в связи со способом регулирования.
Модули 35 и 37 тоже выполнены, как было описано выше.
Блоки 25, 27 выполнены, как было описано выше.
Модуль 39 регулирования рабочих параметров выполнен с возможностью подачи команд на приводы, причем эти приводы являются механизмами 9 перемещения кластеров 7 и контуром 15 впрыска.
Предпочтительно управление группами осуществляют, как было описано выше, в частности, с распределением групп в первом и втором комплексах Pbank и Hbank и с перемещением первого и второго комплексов.
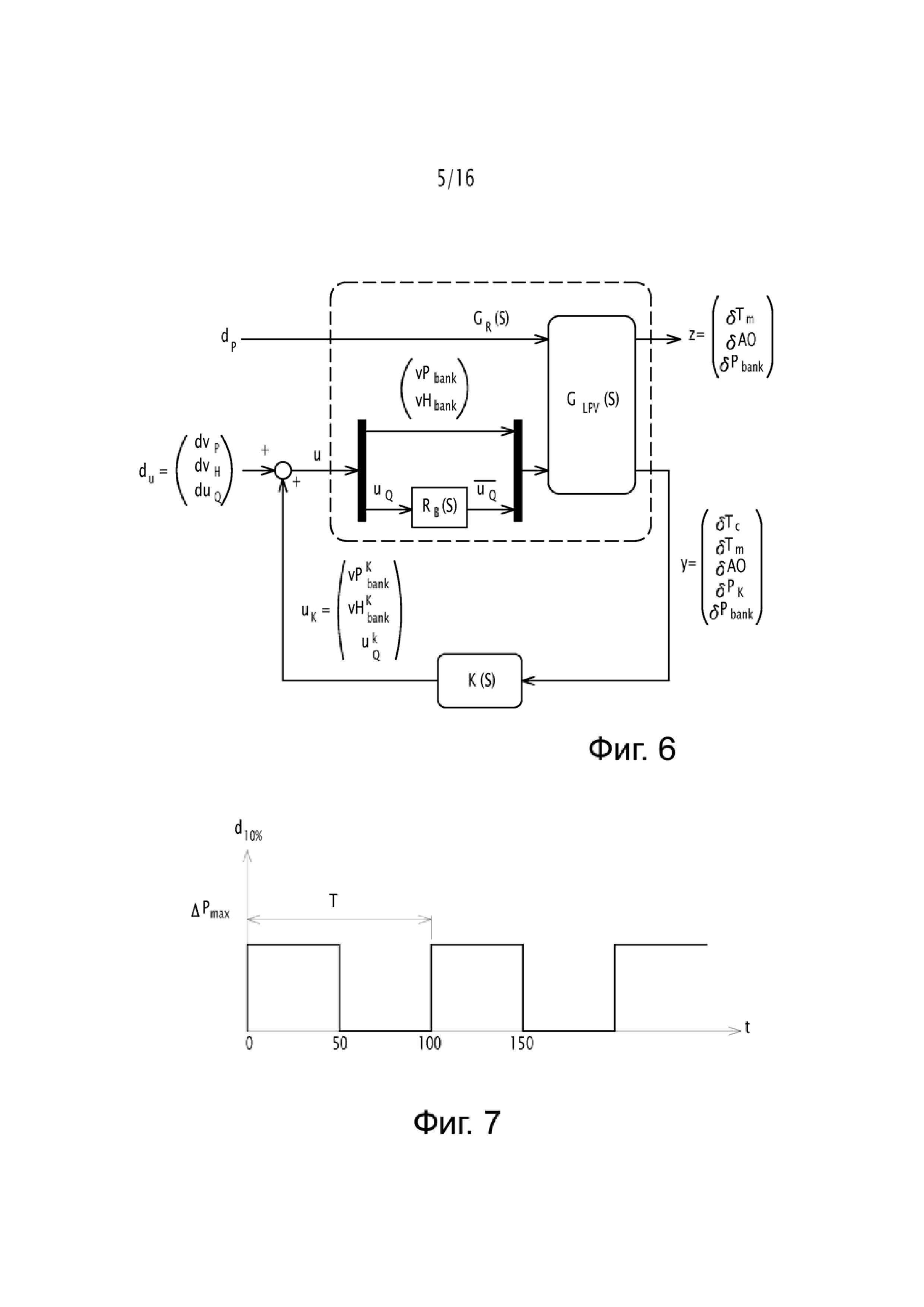
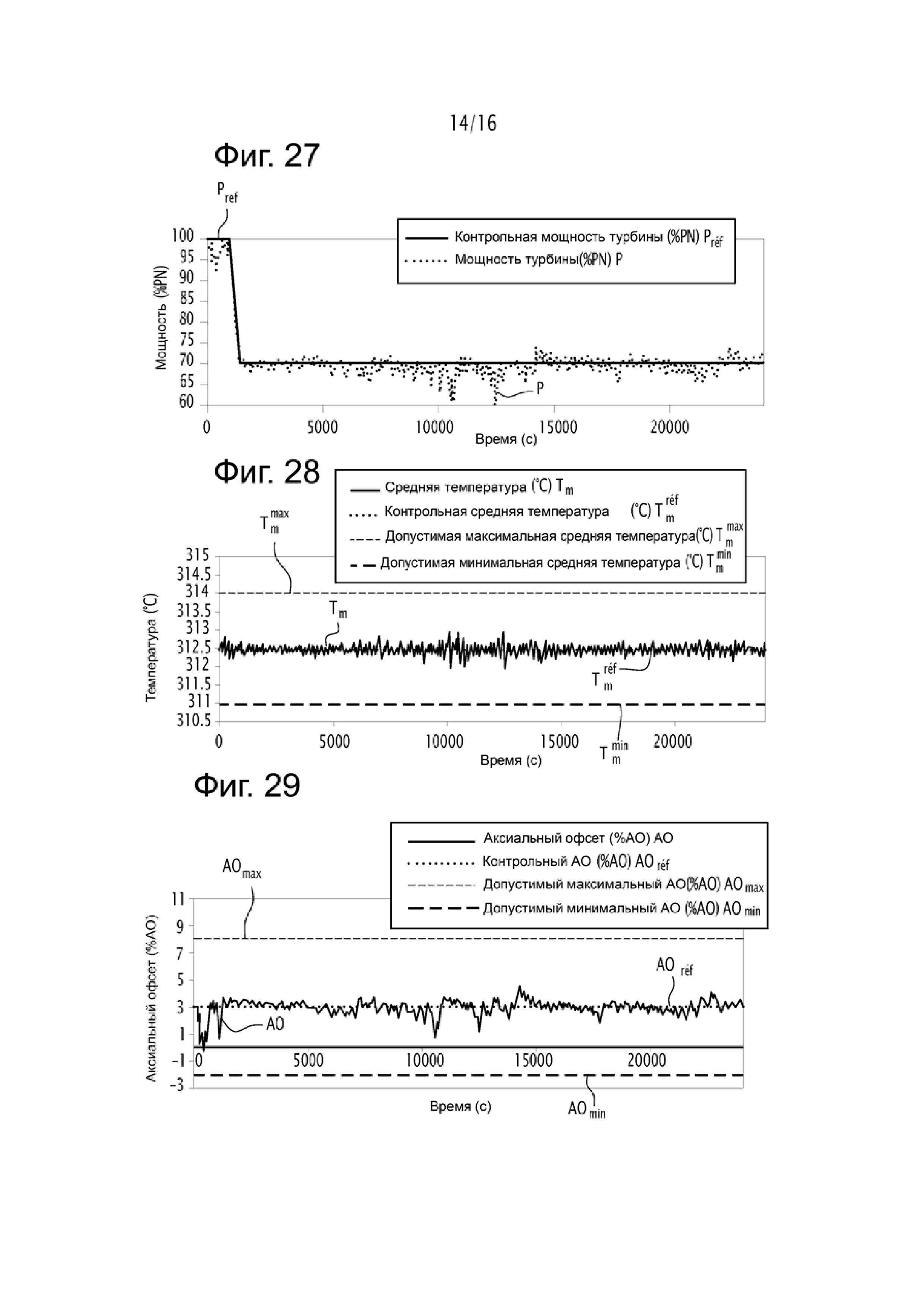
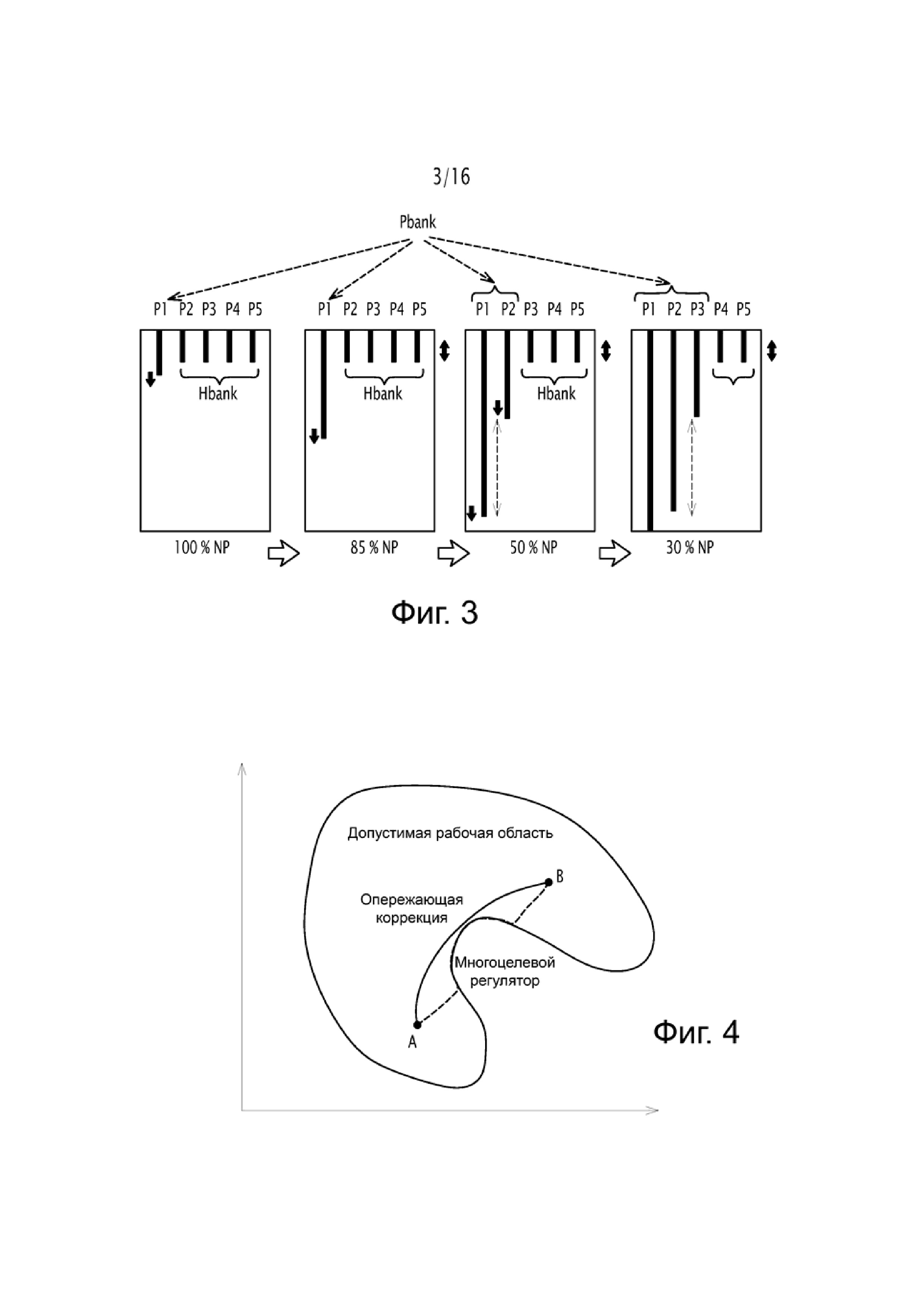
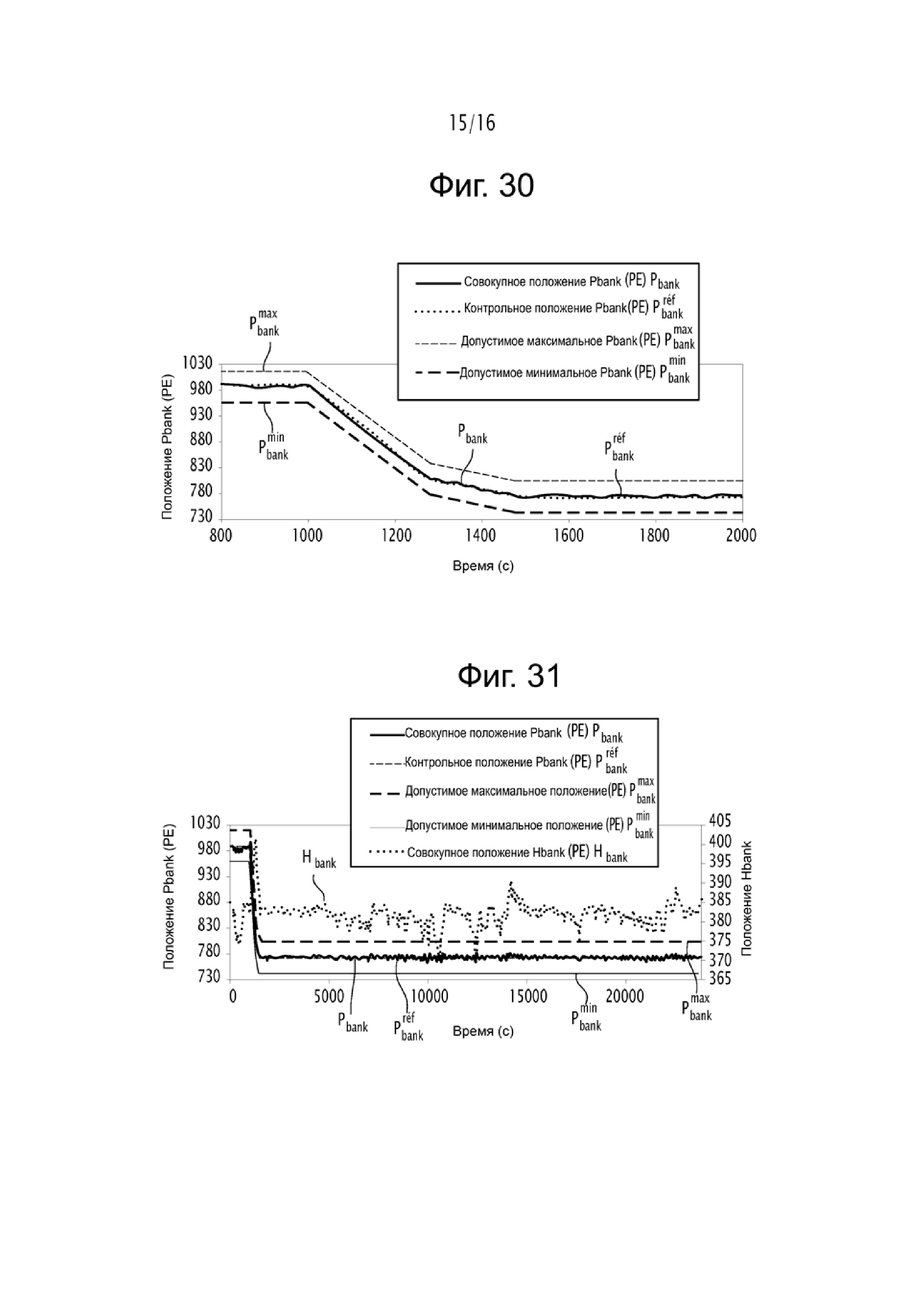
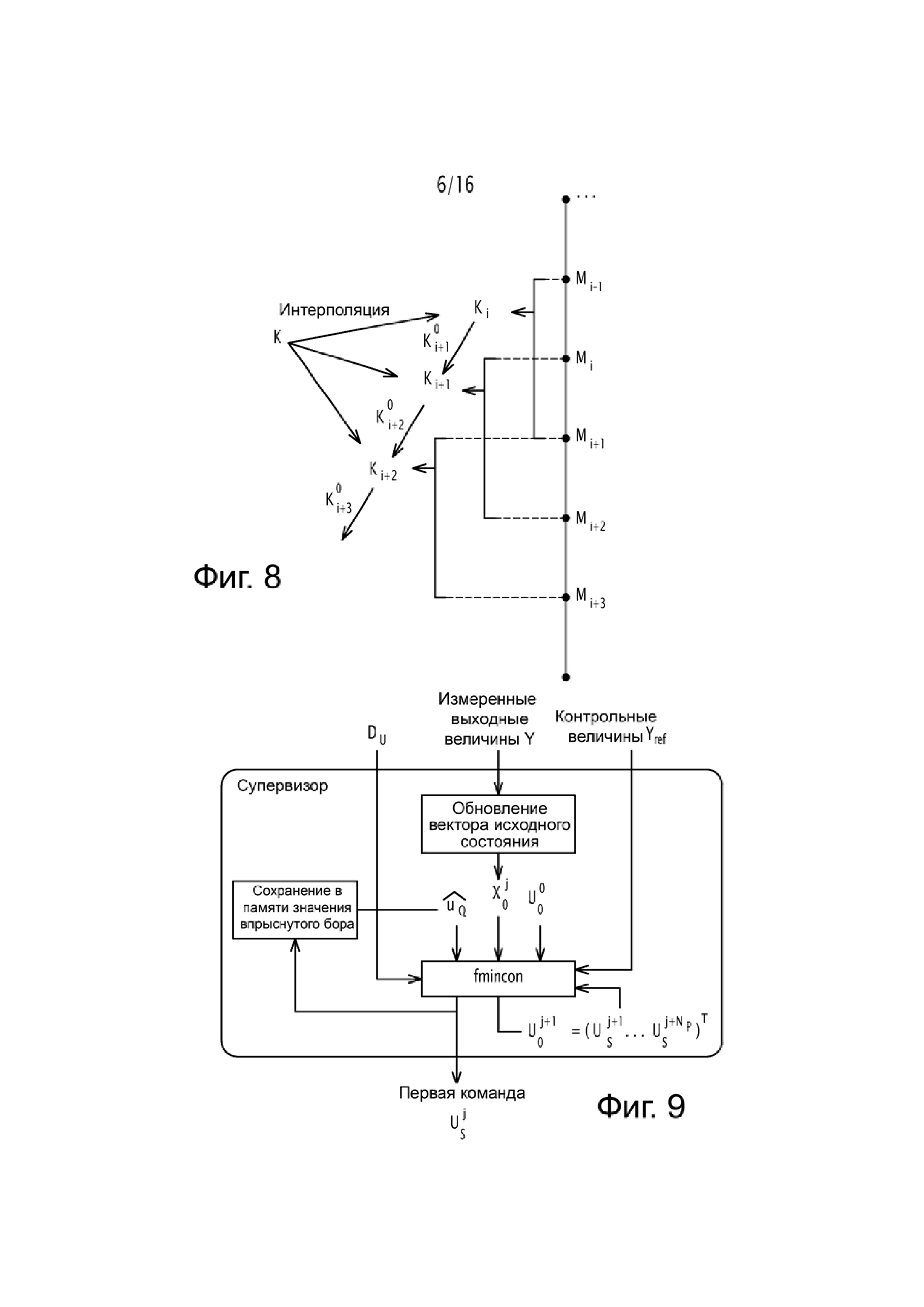
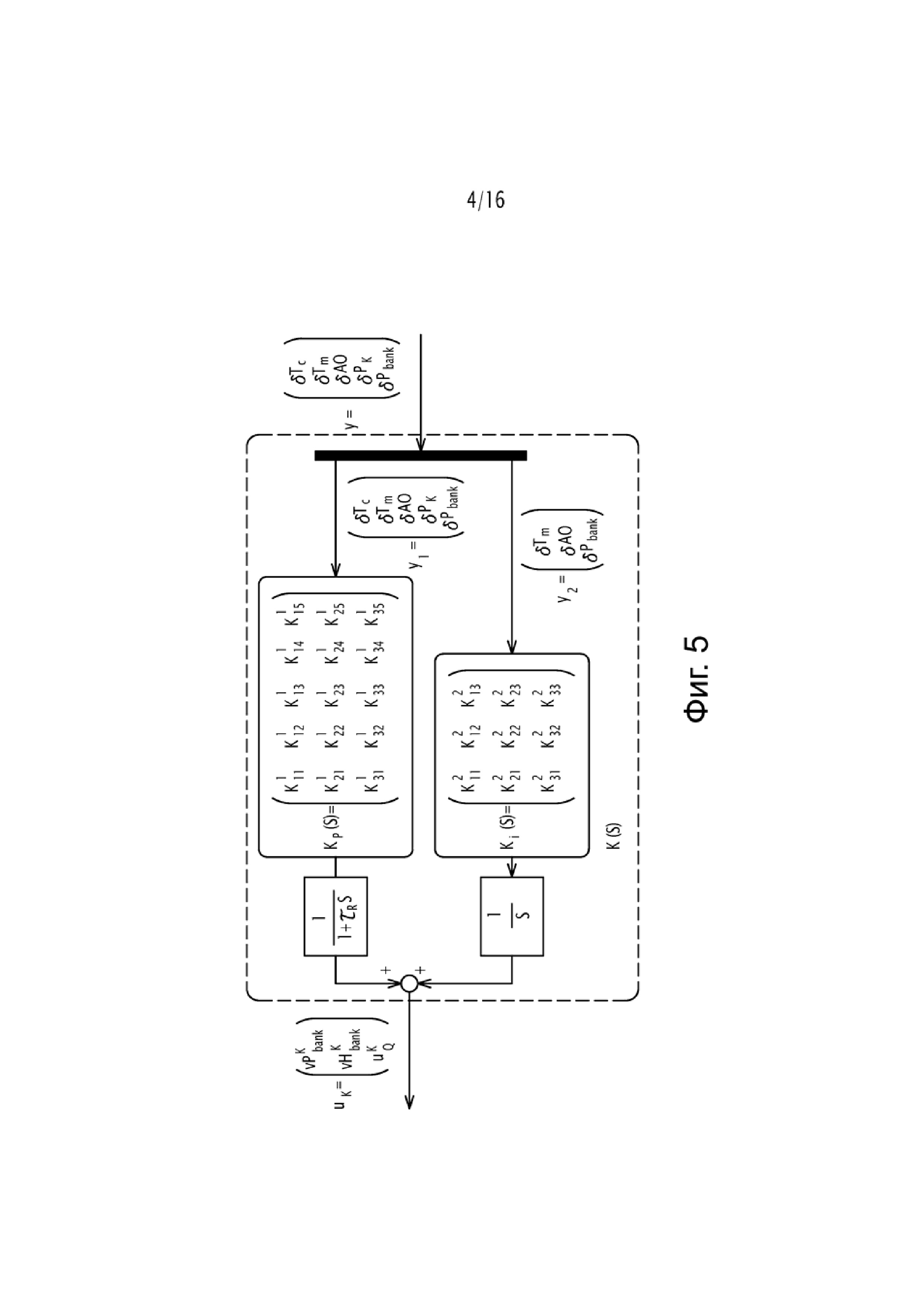
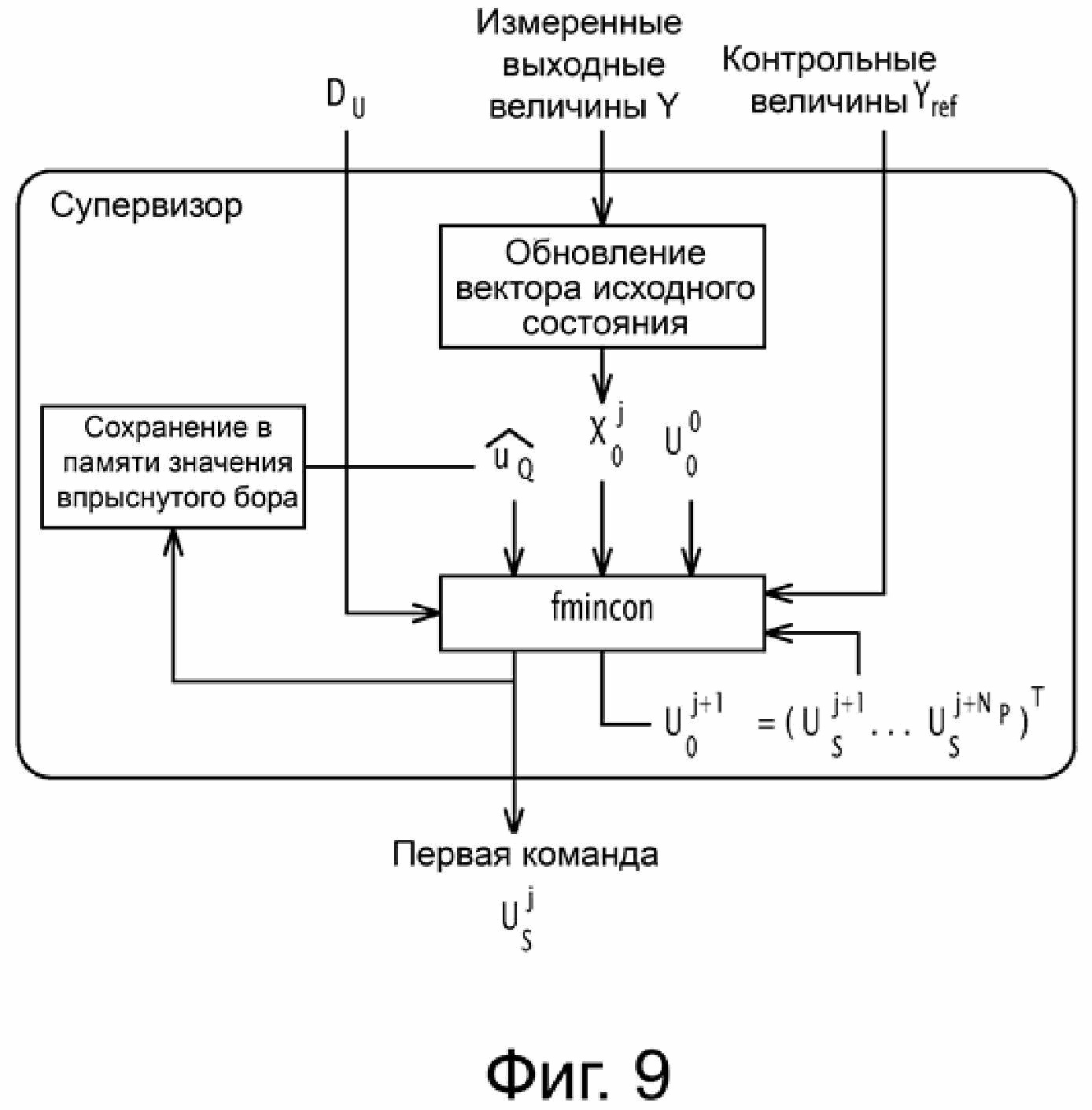
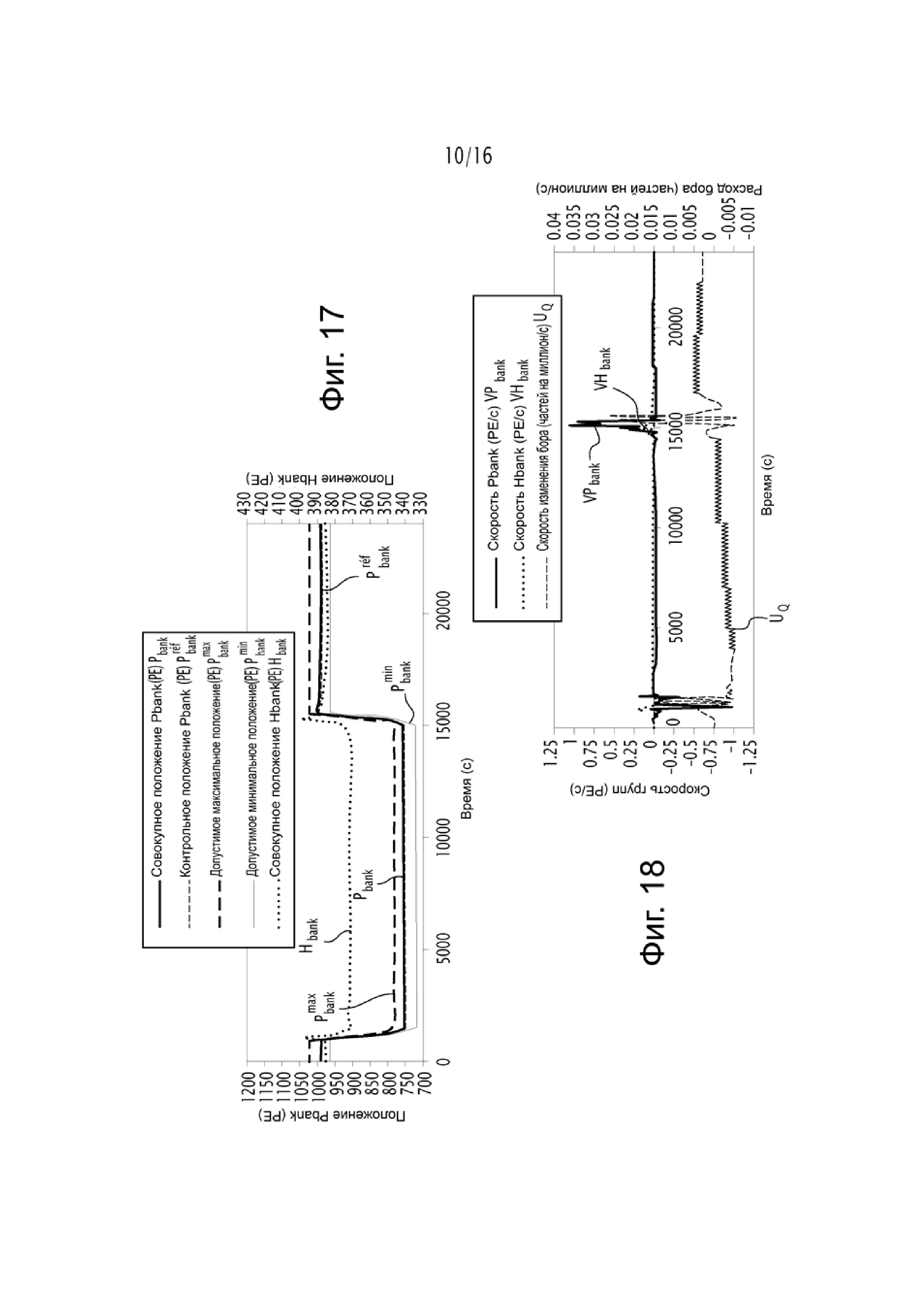
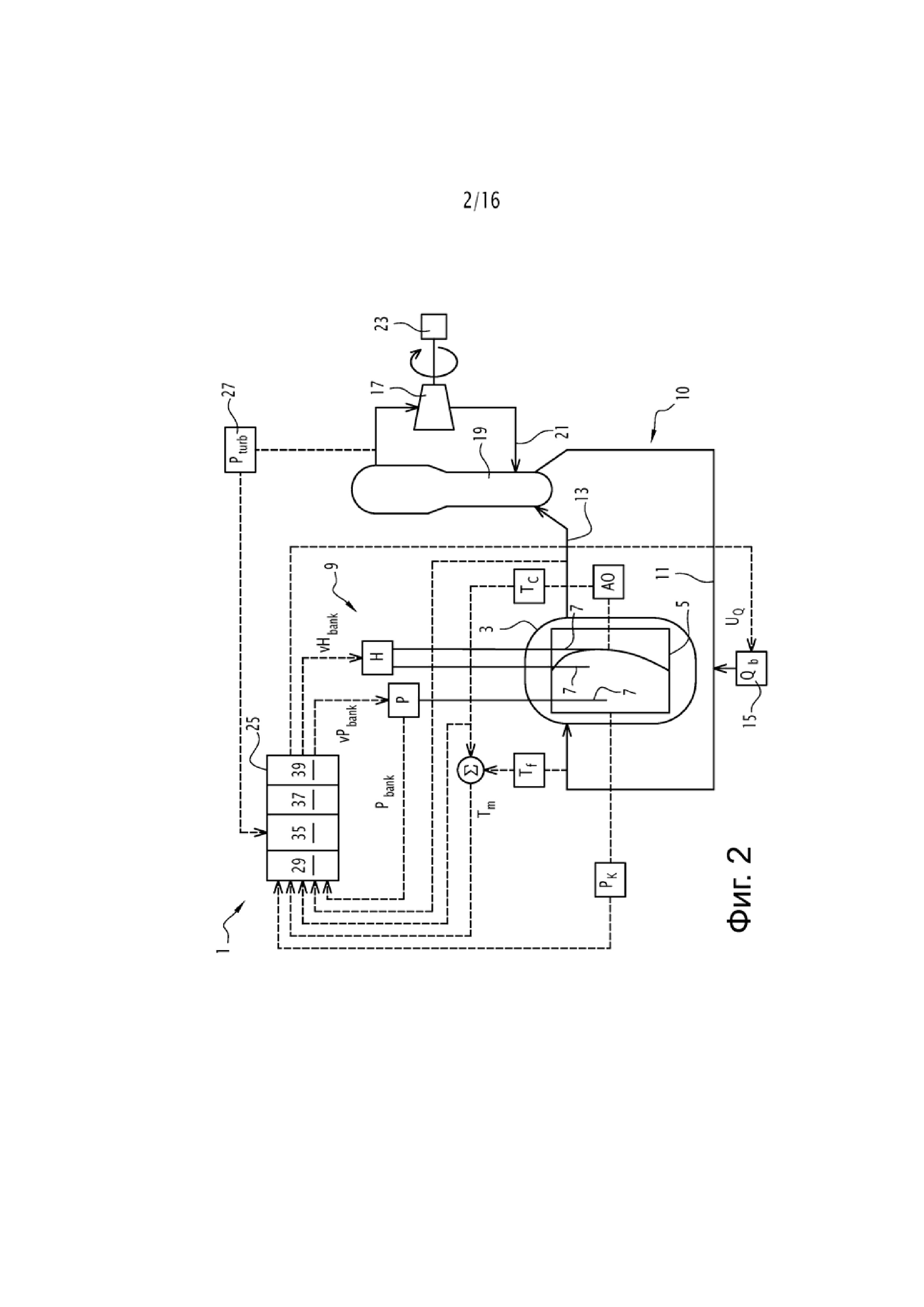

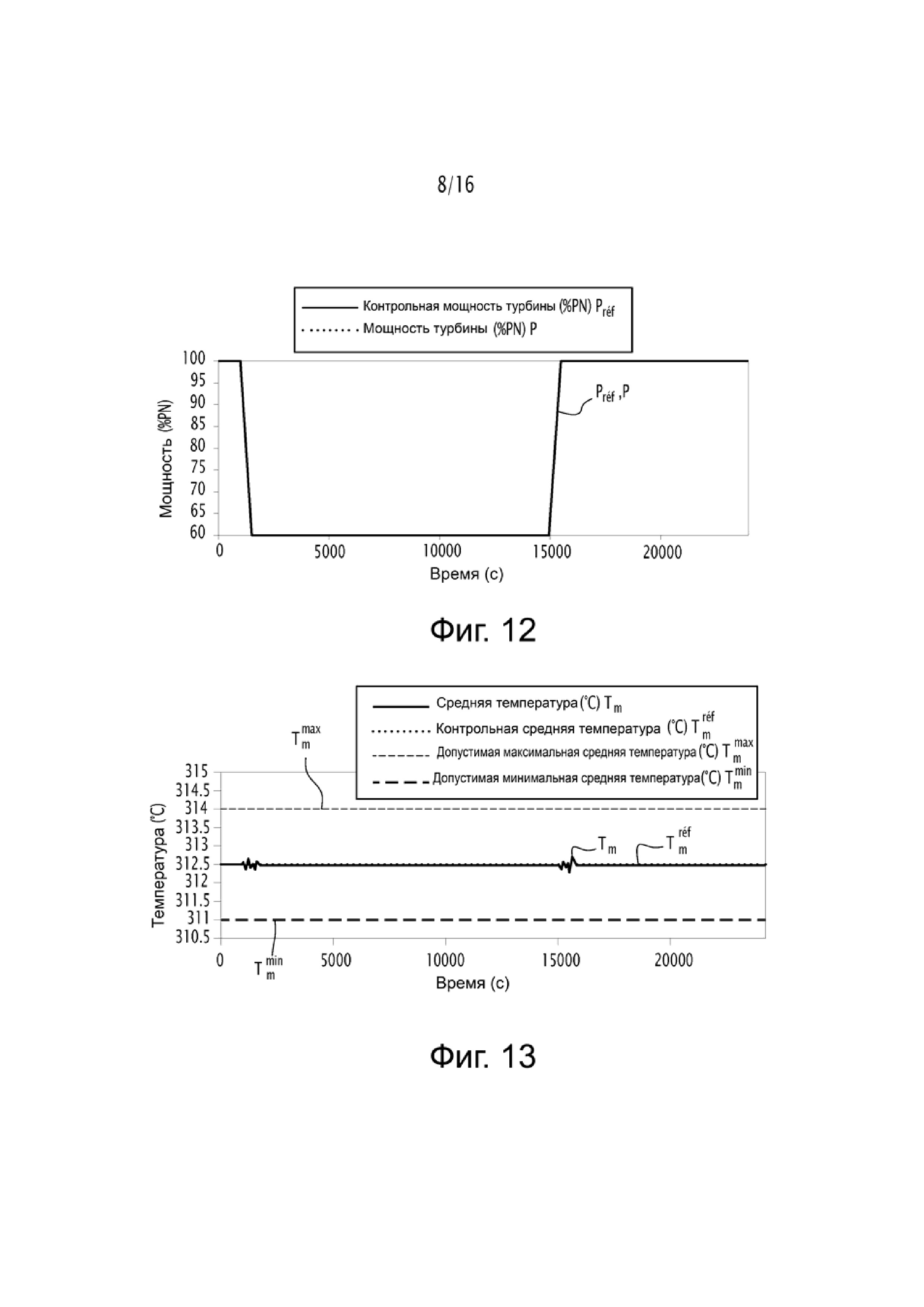
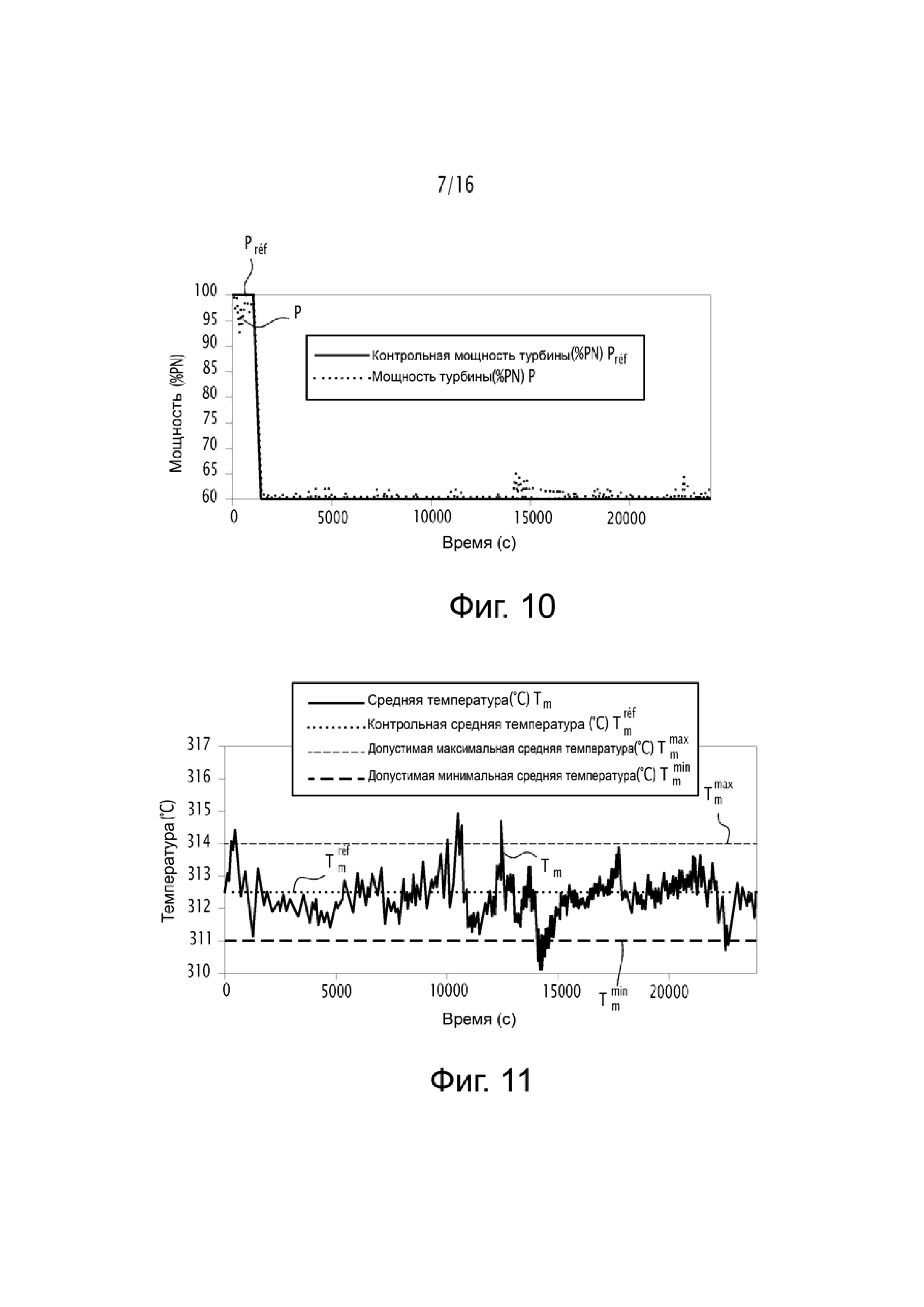

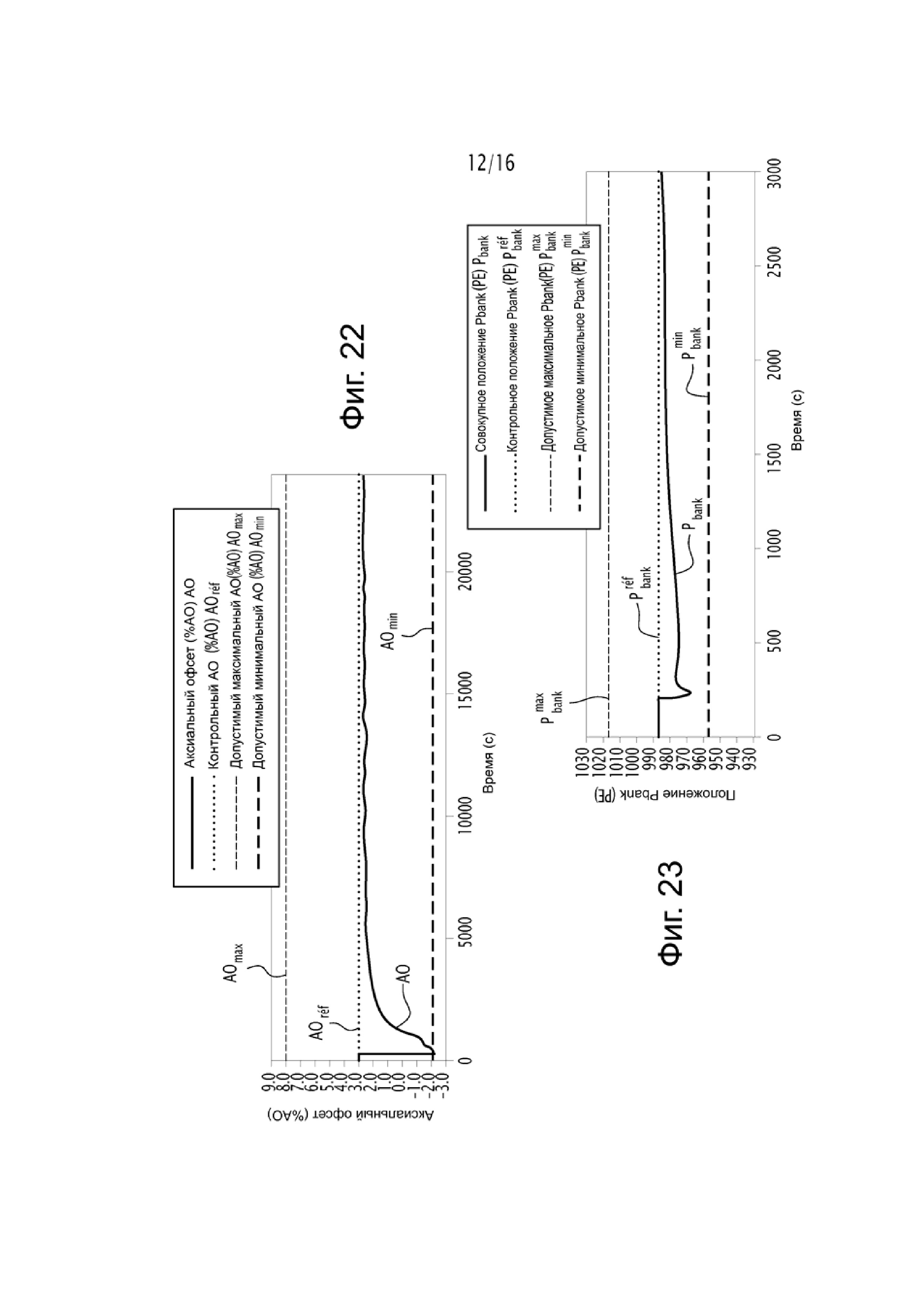
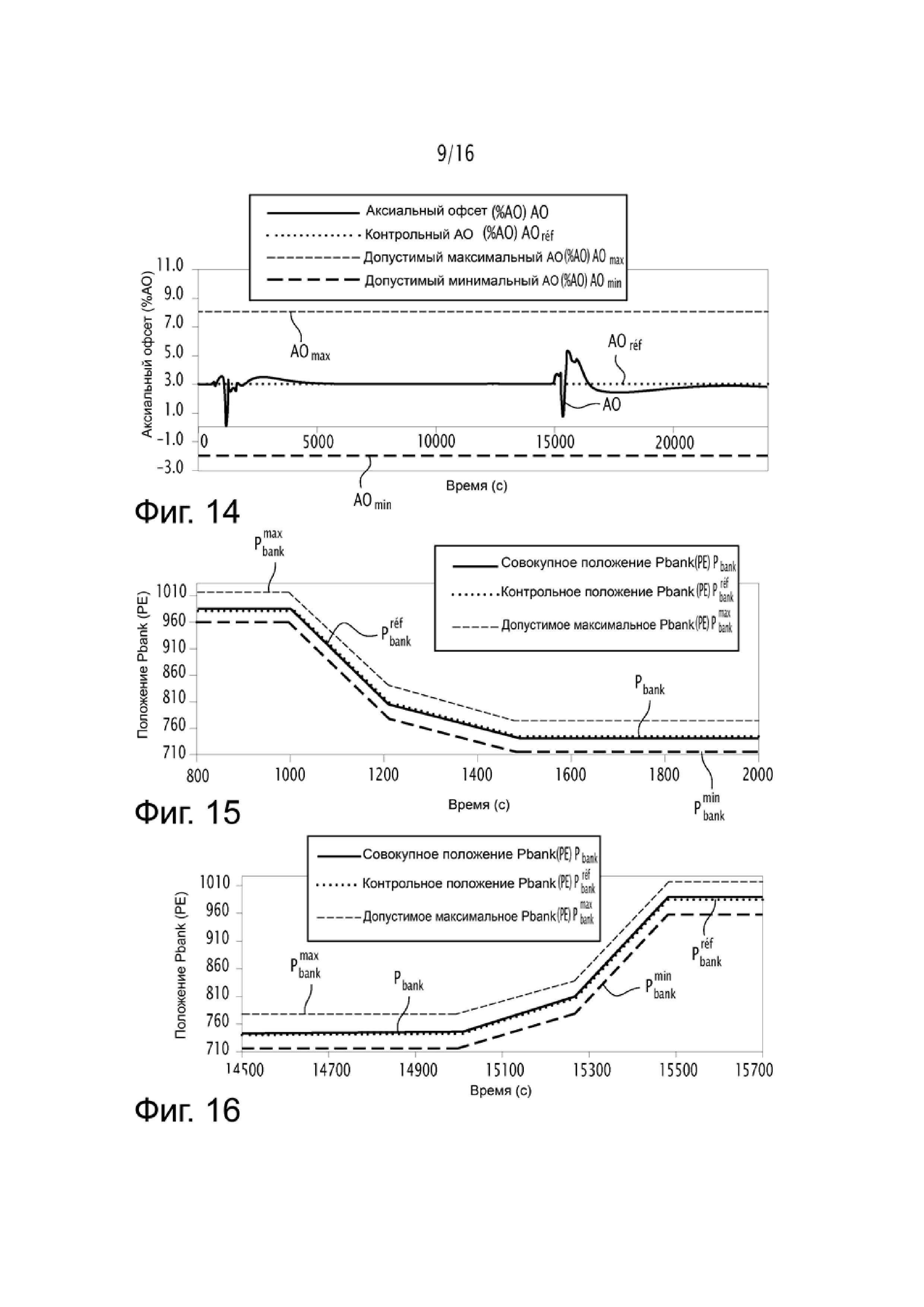
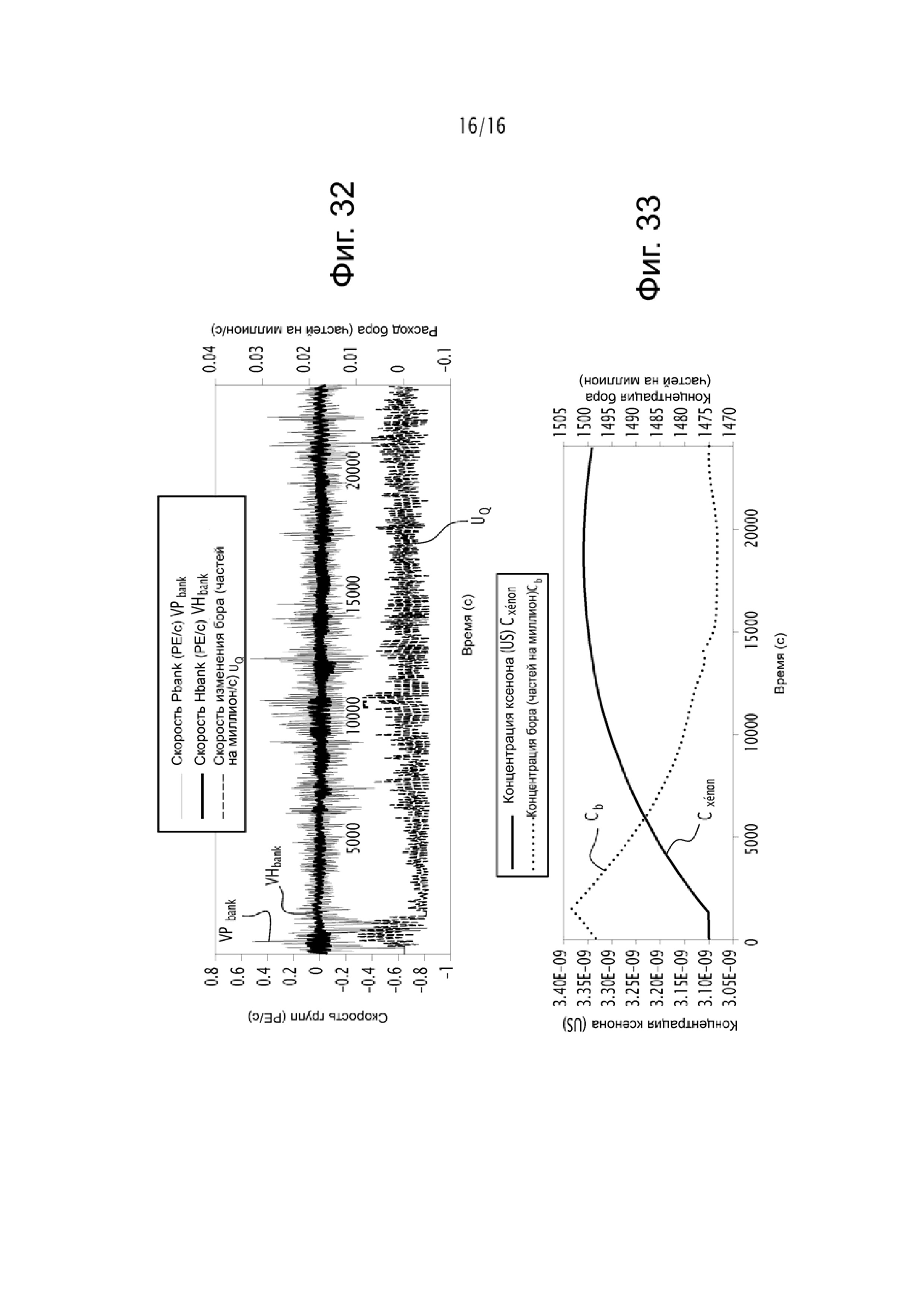
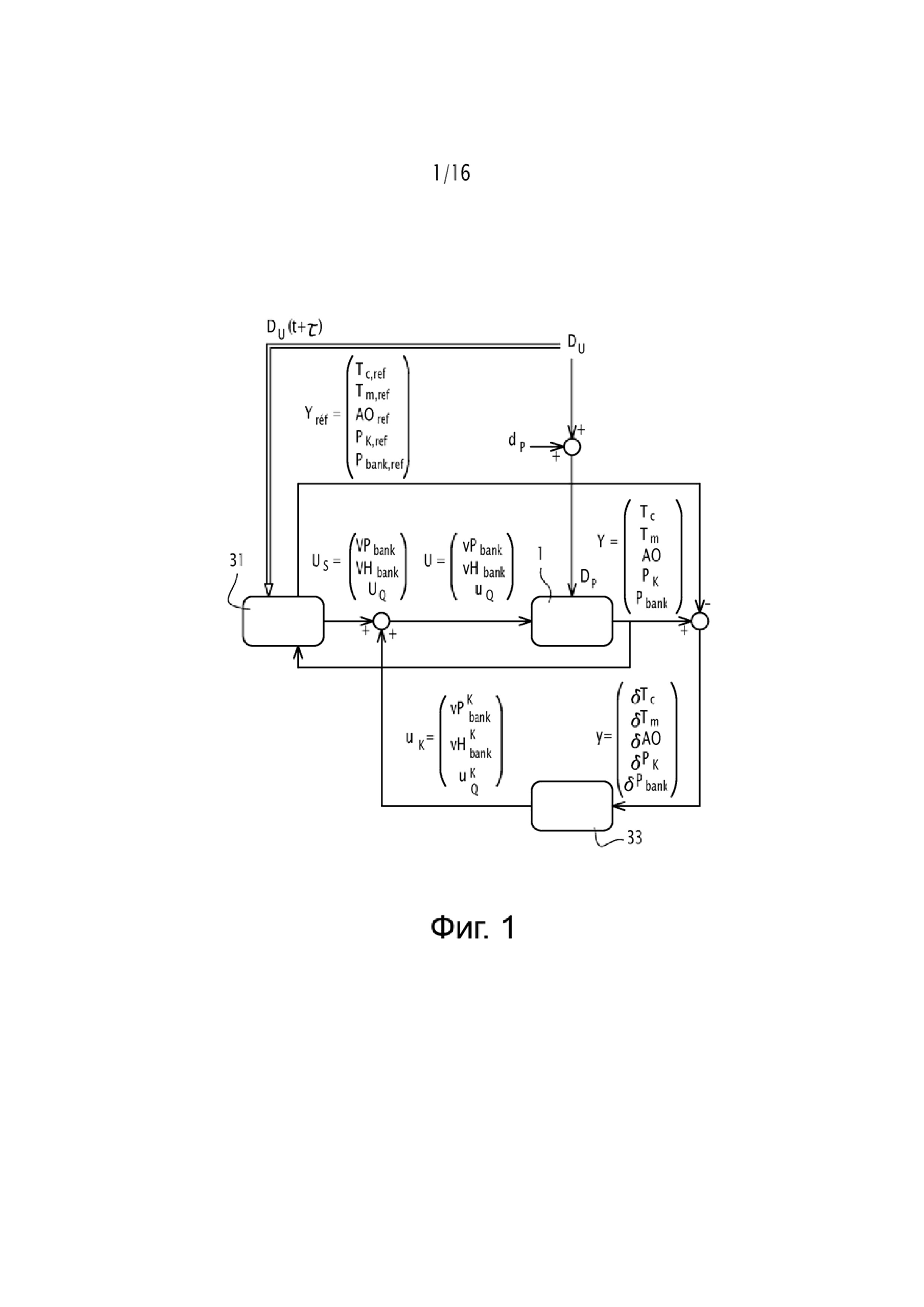
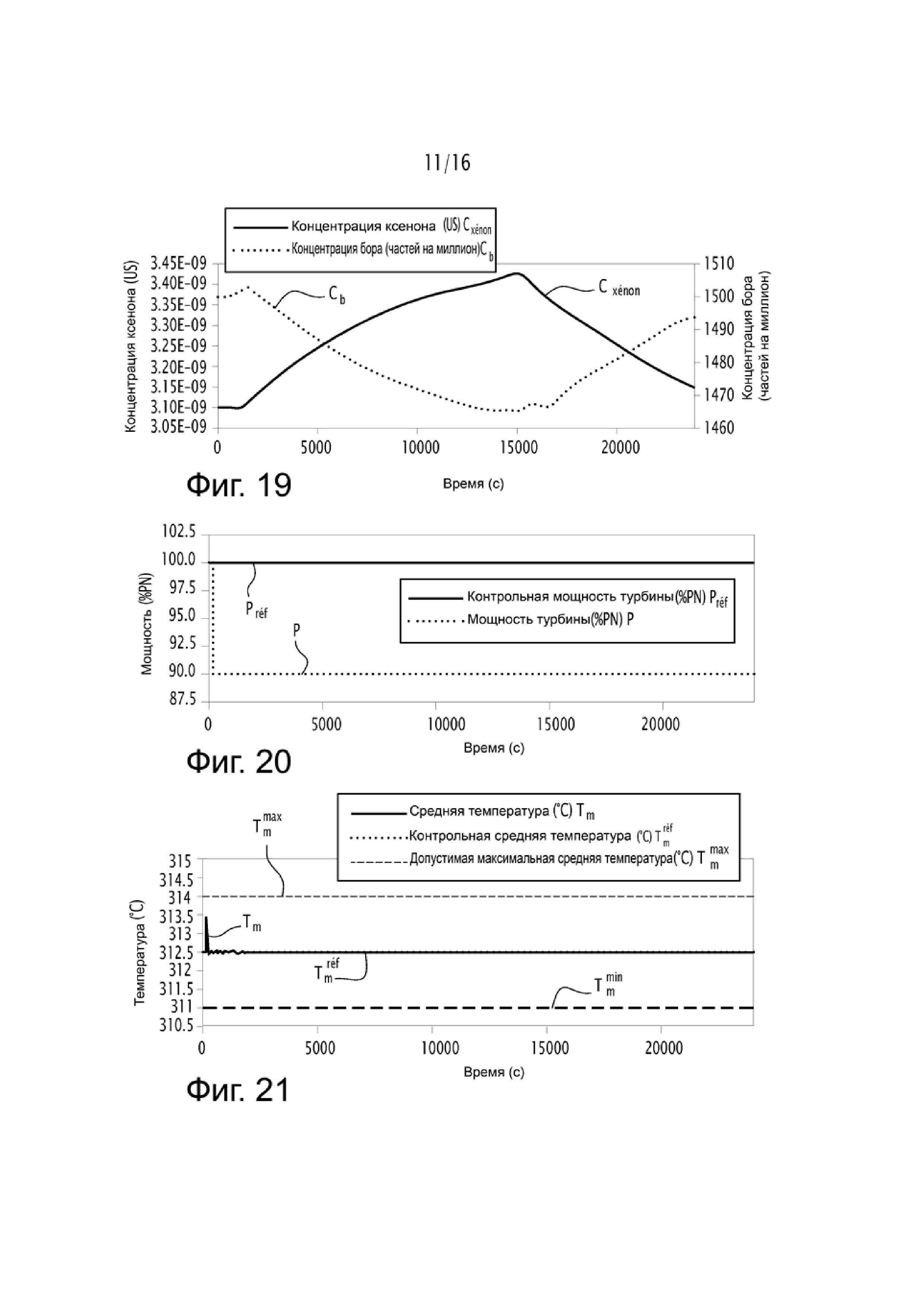
Электронное устройство и способ управления отображением данных для контролирования атомной электростанции, взаимодействующая с ним система управления и компьютерный программный продукт
Способ контроля поверхности металла и соответствующее устройство для контроля
Узел кабельных вводов, электрический узел, электрический шкаф и связанный с ними способ

