Результат интеллектуальной деятельности: АСТРОВИЗИРУЮЩИЙ ПРИБОР
Вид РИД
Изобретение
Изобретение относится к области оптико-электронного приборостроения и может быть использовано в системах астроориентации, астрокоррекции и астронавигации малогабаритных летательных аппаратов (ЛА).
Общей проблемой применения систем инерциальной навигации является специфика ее работы, которая приводит к появлению и накоплению ошибок в определении положения ЛА, которые с течением времени могут стать неприемлемо большими, поэтому результирующая траектория полета будет значительно отличаться от заданной или запланированной траектории полета при отсутствии коррекции.
Известен астровизирующий прибор с подвижным полем зрения (см. Федосеев В.И. и др. Оптико-электронные приборы ориентации и навигации космических аппаратов. Москва, Логос, 2007 г., стр. 142-150), содержащий входную оптическую систему с объективом, в фокальной плоскости которого установлен приемник излучения, размещенные на внутренней рамке карданова подвеса, а также внешнюю рамку карданова подвеса и блок обработки информации, первый вход которого подключен к выходу, а первый управляющий выход - к управляющему входу приемника излучения, при этом внутренняя и внешняя рамки подвеса снабжены приводами, входы которых подключены соответственно ко второму и третьему управляющим выходам блока обработки информации, и измерителями угла поворота, выходы которых подключены соответственно ко второму и третьему входам блока обработки информации.
Недостатком данного астровизирующего прибора является большая продолжительность измерения углового положения заданной звезды, связанная с последовательным проведением операций, составляющих процесс измерения.
Известен астровизирующий прибор (см. патент RU 2540136, МПК G01C 21/02, опубл. 10.02.2015), содержащий входную оптическую систему с объективом, в фокальной плоскости которого установлен приемник излучения, размещенные на внутренней рамке карданова подвеса, а также внешнюю рамку карданова подвеса и блок обработки информации, первый вход которого подключен к выходу, а первый управляющий выход - к управляющему входу приемника излучения, при этом внутренняя и внешняя рамки подвеса снабжены приводами, входы которых подключены соответственно ко второму и третьему управляющим выходам блока обработки информации, и измерителями угла поворота.
Блок обработки информации выполнен в виде многопроцессорного устройства управления, первый и второй многоканальные входы которого подключены соответственно к многоканальным выходам измерителей угла поворота.
В состав вычислительной системы блока обработки информации входят три процессора.
Процесс измерения углового положения заданной звезды запускается с управляющего устройства (УУ) навигационной системы (НС) ЛА.
В ходе определения положения заданной звезды относительно базы астровизирующего прибора в блоке обработки информации вычислительная система на базе трех процессоров параллельно осуществляет следующие основные операции:
- управление приводами внутренней и внешней рамок подвеса;
- расчет углового положения оси визирования объектива по данным с преобразователей угол-код измерителей угла поворота;
- выделение изображения заданной звезды и определение положения его центра на матрице приемника излучения.
Длительность последней операции значительно больше двух предыдущих, что связано с необходимостью последовательной обработки процессором большого объема видеоданных с приемника излучения, представляющего собой матрицу фоточувствительных элементов. Поэтому длительность данной операции, в основном, и определяет быстродействие астровизирующего прибора в целом.
Недостатком известного астровизирующего прибора является низкая скорость измерения положения заданной звезды относительно базы, ограниченная скоростью проведения операций по выделению изображения заданной звезды и определению положения его центра на матрице приемника излучения.
Кроме того, при работе в составе блока обработки информации вычислительной системы на базе трех высокопроизводительных процессоров потребляется значительная электрическая энергия, что приводит к необходимости использования источников питания повышенной мощности и введения дополнительных конструктивных элементов для обеспечения отвода выделяемого тепла.
В конечном итоге ухудшаются весогабаритные характеристики прибора, являющиеся одними из основных для оборудования, устанавливаемого на ЛА.
Прототипом является астровизирующий прибор (см. патент RU 2682260, МПК G01C 21/02, опубл. 18.03.2019), содержащий внутреннюю и внешнюю рамки карданова подвеса, снабженные приводами и измерителями угла поворота, размещенные на внутренней рамке подвеса входную оптическую систему с объективом, в фокальной плоскости которого установлен приемник излучения, блок обработки информации, который содержит соединенные между собой узел программной обработки и узел аппаратной обработки, управляющий выход которого подключен к управляющему входу приемника излучения, причем узел аппаратной обработки имеет N-канальный видеовход, соединенный с N-канальным видеовыходом приемника излучения, при этом в узле аппаратной обработки размещены первое вычислительное устройство, соединенное с приводом внутренней рамки подвеса, второе вычислительное устройство, соединенное с приводом внешней рамки подвеса, N третьих вычислительных устройств для обработки видеоданных, полученных от приемника излучения, устройство интерфейса, с которым соединены указанные вычислительные устройства, а в узле программной обработки размещено четвертое вычислительное устройство, соединенное с N третьими вычислительными устройствами посредством устройства интерфейса.
Узел аппаратной обработки портом ввода-вывода подключен к УУ НС ЛА, в котором хранится каталог, содержащий координаты звезд, и осуществляется астрокоррекция.
Основной задачей, выполняемой прибором-прототипом, является астровизирование - определение углового положения заданной звезды относительно базы астровизирующего прибора.
Для ее реализации в данном астровизирующем приборе по командам с УУ НС ЛА необходимо выполнить две операции, составляющие цикл измерения:
- направить ось объектива на заданную звезду, выбранную в качестве астроориентира;
- одновременно выдать в УУ НС ЛА информацию о фактическом угловом положении оси визирования объектива и положении центра изображения заданной звезды в системе координат матрицы приемника излучения.
Недостатком прототипа является низкая скорость установки оси визирования объектива в соответствии с расчетным направлением на звезду приводами внутренней и внешней рамок подвеса, связанная с тем, что данные с измерителей угла поворота рамок подвеса поступают последовательно в устройство интерфейса, УУ НС ЛА, снова в устройство интерфейса, и только после этого поступают на вход вычислительных устройств, управляющих приводами внутренней и внешней рамок подвеса, где затем осуществляется корректировка положения внутренней и внешней рамок подвеса по показаниям измерителей угла поворота.
Такая последовательность передачи данных снижает быстродействие и точность стабилизации оси визирования объектива.
Низкая точность стабилизации оси визирования объектива обусловлена еще и низкой точностью синхронизации данных.
Данные о положении внутренней и внешней рамок подвеса и о положении центра изображения заданной звезды поступают в устройство интерфейса, но перед этим видеоданные проходят через вычислительные устройства, где происходит расчет положения центра изображения заданной звезды в два этапа: сначала изображение по частям параллельно обрабатывается на N вычислительных устройствах, затем полученные данные поступают на еще одно вычислительное устройство, которое объединяет промежуточные результаты вычислений, выдавая конечный результат положения центра изображения заданной звезды.
Такая последовательность передачи данных снижает точность синхронизации данных в устройстве интерфейса.
Другим недостатком прототипа являются его значительные весогабаритные характеристики и повышенное энергопотребление, обусловленные тем, что в узле аппаратной обработки размещено не менее шести вычислительных устройств, в результате чего применение прибора-прототипа невозможно на малогабаритных ЛА.
Задачей, на решение которой направлено изобретение, является повышение скорости установки оси визирования объектива астровизирующего прибора на заданную звезду и точности синхронизации данных и, как следствие, повышение точности расчета поправок к углам ориентации для коррекции траектории полета ЛА при снижении весогабаритных характеристик и энергопотребления.
Технический результат достигается тем, что в астровизирующем приборе, содержащем входную оптическую систему с объективом, в фокальной плоскости которого установлен приемник излучения, размещенные на внутренней рамке подвеса, внешнюю рамку подвеса, блок обработки информации, первый управляющий выход которого подключен к управляющему входу приемника излучения, а первый видеовход соединен с видеовыходом приемника излучения, при этом внутренняя и внешняя рамки подвеса снабжены приводами и измерителями угла поворота, первое вычислительное устройство, соединенное с приводом и измерителем угла поворота внутренней рамки подвеса, второе вычислительное устройство, соединенное с приводом и измерителем угла поворота внешней рамки подвеса, блок обработки информации представляет собой взаимосвязанные узел аппаратной обработки, выполненный в виде устройства интерфейса, и узел программной обработки, содержащий соединенные между собой третье вычислительное устройство для обработки видеоданных, полученных от приемника излучения, и четвертое вычислительное устройство, порт ввода-вывода блока обработки информации является входом и выходом астровизирующего прибора и выполнен с возможностью подключения к управляющему устройству навигационной системы летательного аппарата, в соответствии с предлагаемой полезной моделью, первое вычислительное устройство размещено на внутренней рамке подвеса и соединено с вторым входом-выходом блока обработки информации, второе вычислительное устройство размещено вне блока управления информации и подключено к его третьему входу-выходу, четвертое вычислительное устройство выполнено с возможностью расчета корректирующих поправок к навигационным параметрам летательного аппарата.
А также тем, что узел аппаратной обработки блока обработки информации выполнен с возможностью обеспечения синхронизации видеоданных, получаемых от приемника излучения, данных о положении внутренней и внешней рамок подвеса, получаемых от первого и второго вычислительных устройств, данных о текущей ориентации навигационной системы летательного аппарата, получаемых от управляющего устройства навигационной системы летательного аппарата, с обеспечением привязки к каждому событию прихода данных соответствующей временной метки.
А также тем, что четвертое вычислительное устройство выполнено со звездным каталогом, содержащим все звезды до четвертой звездной величины, с возможностью расчета на каждом такте прихода данных положения звезды относительно базы астровизирующего прибора, с перерасчетом координат центра изображения звезды из системы координат матрицы приемника излучения в приборную систему координат, связанную с базой астровизирующего прибора.
А также тем, что узел аппаратной обработки соединен с приемником излучения посредством высокоскоростного последовательного дифференциального интерфейса, выполненного на основе стандарта низковольтной дифференциальной передачи сигналов.
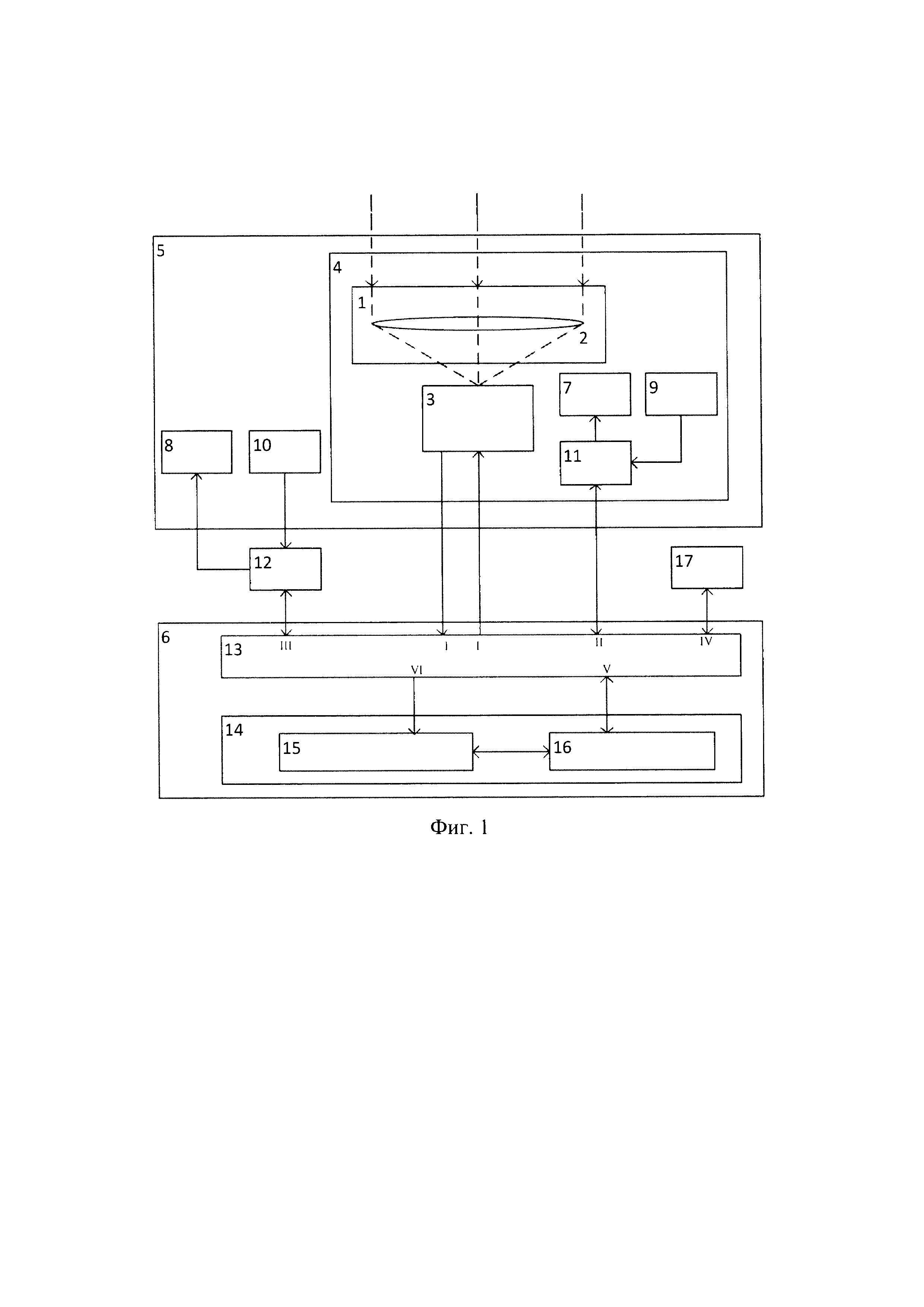
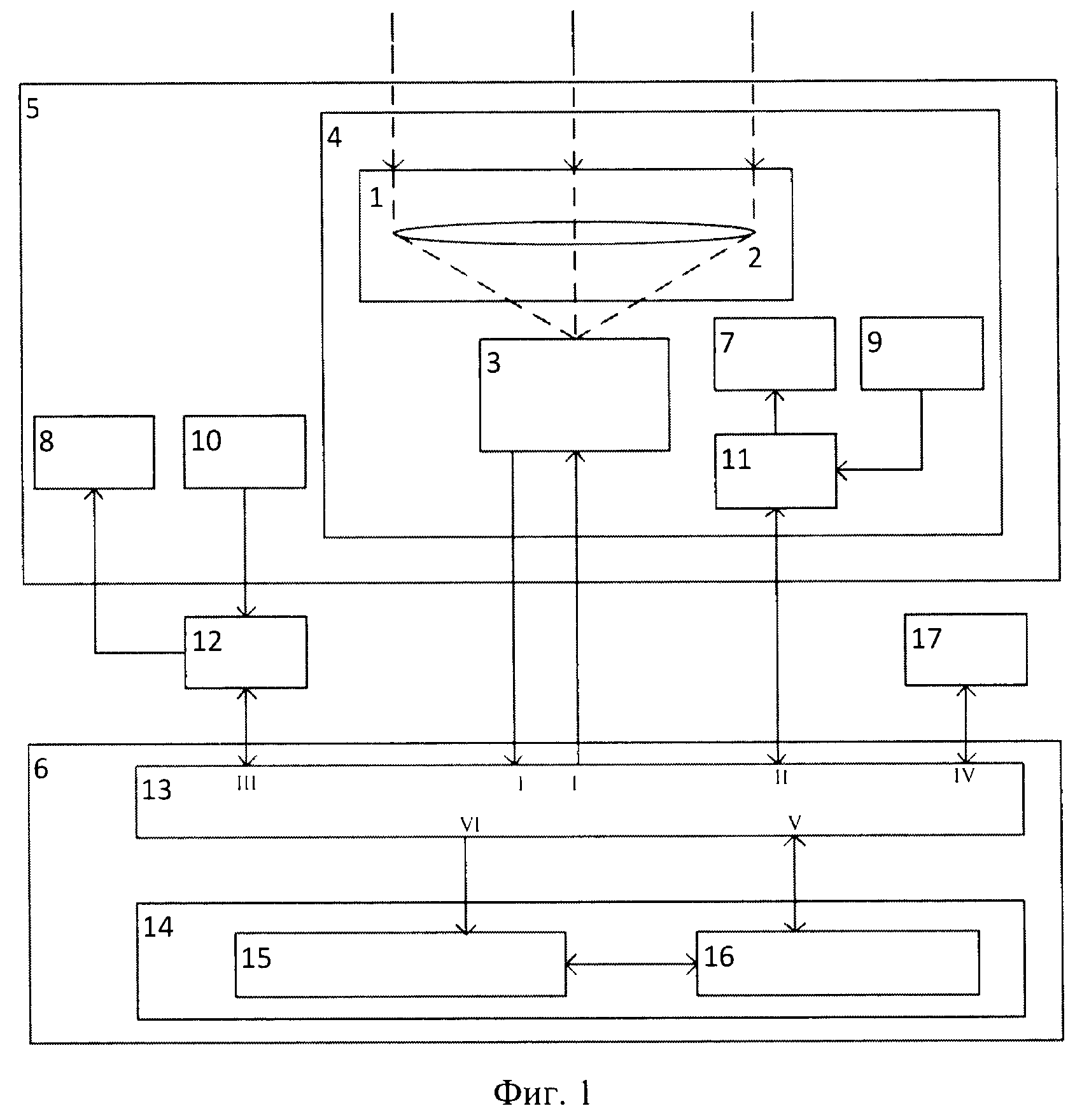
На фиг. 1 показана функциональная схема предлагаемого астровизирующего прибора.
Астровизирующий прибор, содержит входную оптическую систему 1 с объективом 2, в фокальной плоскости которого установлен приемник излучения 3, размещенные на внутренней рамке подвеса 4, а также внешнюю рамку подвеса 5, блок обработки информации 6, первый управляющий выход I которого подключен к управляющему входу приемника излучения 3, а первый видеовход I соединен с видеовыходом приемника излучения 3, при этом внутренняя 4 и внешняя 5 рамки подвеса снабжены приводами 7 и 8 и измерителями угла поворота 9 и 10, соответственно.
Приемник излучения 3 содержит матрицу фоточувствительных элементов формата 1920×1200 с устройствами считывания и аналого-цифрового преобразования, имеющую восемь цифровых выходных видеоканалов и программируемую логическую интегральную схему (ПЛИС) с низкой потребляемой мощностью, изготовленную по технологии field-programmable gate array (FPGA) - на чертеже не показана.
Внутренняя 4 и внешняя 5 рамки подвеса образуют двухосный карданов подвес, обеспечивающий перемещение оси объектива 2 оптической системы 1 по углу места и азимутальному углу, соответственно.
В качестве приводов 7 и 8 внутренней 4 и внешней 5 рамок подвеса используются бесконтактные моментные электродвигатели с электромагнитной редукцией частоты вращения ротора и возбуждением от высокоэрцетивных постоянных магнитов.
Измерители угла поворота 9 и 10 внутренней 4 и внешней 5 рамок подвеса реализованы на базе высокоточной оптической энкодерной системы с разрешением до 0,02''.
Первое вычислительное устройство (ВУ) 11, размещено на внутренней рамке подвеса 4 и соединено с ее приводом 7 и измерителем угла поворота 9, а также с вторым портом II входа-выхода блока обработки информации 6.
Второе ВУ 12, соединенное с приводом 8 и измерителем угла поворота 10 внешней рамки подвеса 5, размещено вне блока обработки информации 6 и подключено к его третьему порту III входа-выхода.
Первое 11 и второе 12 ВУ реализованы на базе двухъядерных микроконтроллеров.
Блок обработки информации 6 представляет собой взаимосвязанные узел аппаратной обработки 13, выполненный в виде устройства интерфейса, и узел программной обработки 14, содержащий соединенные между собой третье ВУ 15 для обработки видеоданных, полученных от приемника излучения 3, и четвертое ВУ 16, при этом порт IV ввода-вывода блока обработки информации 6 является входом и выходом астровизирующего прибора и выполнен с возможностью подключения к УУ 17 НС ЛА, не входящему в состав астровизирующего прибора.
Узел аппаратной обработки 13 блока обработки информации 6 выполнен на ПЛИС, идентичной ПЛИС из состава приемника излучения 3, с возможностью обеспечения синхронизации видеоданных, получаемых от приемника излучения 3, данных о положении внутренней 4 и внешней 5 рамок подвеса, получаемых от первого 11 и второго 12 ВУ, данных о текущей ориентации ЛА, получаемых от УУ 17 НС ЛА, с обеспечением привязки к каждому событию прихода данных соответствующей временной метки.
Узел аппаратной обработки 13 также осуществляет информационное взаимодействие между приемником излучения 3, первым 11 и вторым 12 ВУ, узлом программной обработки 14 и УУ 17 НС ЛА.
Видеовход I узла аппаратной обработки 13 соединен с видеовыходом приемника излучения 3 посредством высокоскоростного последовательного дифференциального интерфейса, выполненного на основе стандарта низковольтной дифференциальной передачи сигналов LVDS (low-voltage differential signaling).
Узел программной обработки 14 блока обработки информации 6 выполнен в виде одной электронной платы с третьим 15 и четвертым 16 ВУ, представляющими собой дискретные типовые цифровые сигнальные процессоры - digital signal processor (DSP).
Третье ВУ 15 соединено с видеовыходом VI узла аппаратной обработки 13.
Четвертое ВУ 16 узла программной обработки 14 содержит звездный каталог, включающий все звезды до четвертой звездной величины, и выполнено с возможностью расчета корректирующих поправок к навигационным параметрам ЛА с использованием данных о текущем положении внутренней 4 и внешней 5 рамок подвеса, получаемых от первого 11 и второго 12 ВУ через пятый порт V узла аппаратной обработки 13 блока обработки информации 6 и расчета положения звезды относительно базы астровизирующего прибора на каждом такте прихода данных, при этом координаты центра изображения звезды из системы координат матрицы приемника излучения пересчитываются в координаты в приборной системе координат, связанной с базой астровизирующего прибора.
Для взаимодействия с НС ЛА порт IV ввода-вывода узла аппаратной обработки 13 блока обработки информации 6 выполнен с возможностью подключения к УУ 17 НС ЛА и является портом входа-выхода астровизирующего прибора.
Основной задачей, выполняемой астровизирующим прибором, является астровизирование и расчет поправок к углам ориентации для коррекции траектории полета ЛА непосредственно в самом астровизирующем приборе путем вычисления рассогласования расчетного и измеренного углового положения не менее двух звезд.
Работает астровизирующий прибор следующим образом.
УУ 17 НС ЛА после начала информационного взаимодействия с астровизирующим прибором периодически, через небольшие промежутки времени осуществляет обмен данными, передавая при этом информацию об углах ориентации ЛА: ψ - курс, θ - тангаж, γ - крен и углах навигации: ϕ - широта, λ - долгота.
В момент выхода на участок полета, оптимальный для проведения измерений, УУ 17 НС подает соответствующую команду в астровизирующий прибор.
Обмен данными происходит через узел аппаратной обработки 13 блока обработки информации 6, где к полученным данным привязывается временная метка, после чего полученные данные, в том числе текущие навигационные параметры и временная метка, поступают в четвертое ВУ 16.
В четвертом ВУ 16 в ответ на каждое событие прихода новых данных от узла аппаратной обработки 13, и данных из каталога звезд, записанного в четвертом ВУ 16, выбирается звезда в поле зрения объектива 2 и осуществляется расчет углов αс, βс направления на заданную звезду;
Наличие в звездном каталоге всех звезд до четвертой звездной величины включительно (кроме парных) позволяет не прерывать расчет навигационных параметров на тех участках полета, где основные навигационные звезды труднодоступны для наблюдений, например, при небольшом угле отстройки от Солнца и, как следствие, высокой фоновой засветке, или вовсе недоступны для визирования вследствие конструктивных особенностей астровизирующего прибора.
По команде от четвертого ВУ 16 узел аппаратной обработки 13 через управляющий выход I устанавливает оптимальный режим работы приемника излучения 3.
Информация о расчетных значениях углов αс, βс направления на звезду из четвертого ВУ 16 поступает в виде двоичных кодов через узел аппаратной обработки 13 на входы первого 11 и второго 12 ВУ, преобразующих по определенному закону полученные данные в напряжения на обмотках двигателей приводов 7 и 8.
В результате внутренняя 4 и внешняя 5 рамки подвеса приходят в движение, и ось визирования объектива 2 выводится в направлении заданной звезды и удерживается в требуемом положении во время проведения измерений.
Первое 11 и второе 12 ВУ периодически рассчитывают разность между расчетным угловым положением звезды αс, βс и угловым положением соответственно внутренней 4 и внешней 5 рамок подвеса, то есть угловым положением оптической оси объектива 2.
Первое 11 и второе 12 ВУ преобразуют полученные разности, например, реализуют их пропорционально-интегрально-дифференциальное преобразование, характер которого может автоматически изменяться в зависимости от условий эксплуатации и т.д., с целью обеспечения максимально быстрого и точного выхода оси объектива 2 в заданное положение и, исходя из результатов, рассчитывают величины напряжений для каждой из фаз приводов 7 и 8 внутренней 4 и внешней 5 рамок подвеса для каждого значения разности для перемещения их в положения, соответствующие расчетным углам αс, βс направления на звезду.
Одновременно оптическая система 1 с объективом 2 формирует на матрице фоточувствительных элементов приемника излучения 3 изображение участка небесной сферы, включая заданную звезду.
Приемник излучения 3 преобразует полученное изображение в последовательную цифровую выборку видеоданных и через высокоскоростной последовательный дифференциальный интерфейс, обеспечивающий высокую пропускную способность и помехозащищенность передачи видеоданных, передает ее в узел аппаратной обработки 13, в этот момент к ним привязывается временная метка.
Одновременно от первого 11 и второго 12 ВУ в узел аппаратной обработки 13 передается информация об угловом положении оси объектива 2, считываемая с измерителей угла поворота 9 и 10 внутренней 4 и внешней 5 рамок подвеса, при этом в узле аппаратной обработки 13 обеспечивается временная синхронизация видеоданных, получаемых от приемника излучения 3, данных о положении внутренней 4 и внешней 5 рамок подвеса, навигационных параметров ЛА, получаемых от УУ 17 НС ЛА.
Логика запроса данных в узле аппаратной обработки 13 построена так, что данные о положении внутренней 4 и внешней 5 рамок подвеса актуальны именно на момент регистрации изображения.
Кроме того, к каждому событию прихода данных привязывается временная метка, которая вместе с соответствующими данными передается в узел программной обработки 14.
Через узел аппаратной обработки 13 видеоданные от приемника излучения 3 поступают в третье ВУ 15, где рассчитывается положение центра изображения заданной звезды в системе координат матрицы приемника излучения 3.
Из третьего ВУ 15 рассчитанные значения положения центра изображения звезды и временная метка, привязанная к видеоданным, поступают в четвертое ВУ 16. Информационный обмен внутри узла программной обработки 14 между четвертым 16 и третьим 15 ВУ осуществляется напрямую через порт ввода-вывода.
Через узел аппаратной обработки 13 в четвертое ВУ 16 одновременно передается информация об угловом положении внутренней 4 и внешней 5 рамок подвеса от первого 11 и второго 12 ВУ.
По полученным данным в четвертом ВУ 16 на каждом такте прихода данных рассчитывается положение заданной звезды относительно базы астровизирующего прибора.
Для этого координаты звезды в системе координат матрицы приемника излучения 3 пересчитываются в координаты приборной системы координат путем умножения на матрицу перехода, где в качестве углов Эйлера принимаются углы, определяющие положение внутренней 4 и внешней 5 рамок подвеса, полученные от первого 11 и второго 12 ВУ на момент регистрации изображения.
Перечисленные операции выполняются с частотой 100 Гц.
По каждому событию прихода данных, если в поле зрения объектива 2 присутствует заданная звезда, в четвертом ВУ 16 анализируются угловые скорости движения ЛА по данным от УУ 17 НС и угловые скорости приводов 7 и 8 по данным от измерителей угла поворота 9, 10 на момент регистрации изображения.
Для дальнейшего расчета не используются измерения координат звезд, когда полученные угловые скорости превышают установленное пороговое значение.
Если указанные скорости не превышают пороговое значение, координаты α, β в приборной системе координат принимаются для использования в расчете навигационных параметров ЛА.
Поскольку при визировании одной звезды получаем два измерения (азимутальный угол α и угол места β), то для нахождения поправок к трем углам ориентации (курса Δψ, крена Δγ, тангажа Δθ) необходимо провести измерения координат, как минимум, двух различных звезд.
Соответственно, аналогично выбирается вторая звезда, находящаяся на некотором угловом расстоянии от первой, и проводится визирование второй звезды.
Затем в четвертом ВУ 16 определяются угловые поправки, представляющие разности между измеренными и расчетными значениями углов визирования звезд.
По полученным данным в четвертом ВУ 16 рассчитываются поправки к углам ориентации Δψ, Δθ, Δγ, а затем рассчитанные значения поступают через узел аппаратной обработки 13 в УУ 17 НС ЛА, где применяются для коррекции траектории полета ЛА.
Таким образом, в заявляемом астровизирующем приборе в соответствии с предложенным техническим решением, обеспечено повышение скорости установки оси визирования объектива, точности синхронизации всех данных, используемых для измерения направления на звезду, и, как следствие, повышение точности коррекции траектории полета ЛА, обеспечен расчет поправок к углам ориентации и навигации непосредственно в блоке обработки информации при снижении весогабаритных характеристик, энергопотребления прибора, обеспечении работоспособности астровизирующего прибора при высоких угловых скоростях.
Голографическое устройство для измерения радиусов кривизны сферических поверхностей
Инфракрасная система с двумя полями зрения
Дифракционный оптический элемент
Оптическая система тепловизионного прибора с двумя полями зрения
Электропроводящее покрытие
Оптический дефлектор
Тепловизионный канал
Инфракрасный коллиматор
Сканирующая система
Оптический дефлектор
Фотонный эхо-процессор с лазерным охлаждением
Устройство юстировки двухзеркальной центрированной оптической системы
Катализатор селективного гидрирования фурфурола
Способ приготовления катализатора селективного гидрирования фурфурола
Устройство визуализации инфракрасного изображения

