Результат интеллектуальной деятельности: Двухосный индикаторный гиростабилизатор
Вид РИД
Изобретение
Изобретение относится к гироскопической технике, а более конкретно к двухосным индикаторным гиростабилизаторам на микромеханических гироскопах, работающим на пилотируемых и беспилотных летательных аппаратах (ЛА) и предназначенных для одновременного выполнения функции стабилизации оптической аппаратуры и управления ее положением в пространстве, а так же функции выработки информации об углах крена и тангажа ЛА.
Известен двухосный индикаторный гиростабилизатор на микромеханических гироскопах, предназначенный для стабилизации и управления оптической аппаратурой в пространстве (Малютин Д.М., Малютина М.Д., Филин И.В. Индикаторный гиростабилизатор на микромеханических гироскопах / Инженерный журнал «Справочник» №1 (166) с Приложением - М.: Издательство «Машиностроение», 2011. - с. 44-53.). Двухосный индикаторный гиростабилизатор содержит наружную рамку, установленную на основании с вращением относительно оси параллельной продольной оси ЛА и расположенную в ней платформу, вращающуюся относительно оси перпендикулярной оси вращения наружной рамки, установленный на оси вращения наружной рамки первый датчик момента, вход которого соединен через первый усилитель мощности и первый корректирующий фильтр с выходом первого микромеханического датчика угловой скорости, установленного на платформе с осью чувствительности параллельной оси вращения наружной рамки индикаторного гиростабилизатора; установленный на оси вращения платформы второй датчик момента, вход которого соединен через второй усилитель мощности и второй корректирующий фильтр с выходом второго микромеханического датчика угловой скорости установленного на платформе с осью чувствительности параллельной оси вращения платформы двухосного индикаторного гиростабилизатора, первый микромеханический акселерометр установленный на платформе с осью чувствительности параллельной оси платформы двухосного индикаторного гиростабилизатора, второй микромеханический акселерометр установленный на платформе с осью чувствительности параллельной оси наружной рамки двухосного индикаторного гиростабилизатора, третий микромеханический акселерометр установленный на платформе с осью чувствительности перпендикулярной плоскости платформы, первый датчик угла командных сигналов, установленный на оси наружной рамки двухосного индикаторного гиростабилизатора, второй датчик угла командных сигналов, установленный на оси платформы двухосного индикаторного гиростабилизатора, оптико-электронный датчик, установленный на платформе так, что его оптическая ось перпендикулярна плоскости платформы двухосного индикаторного гиростабилизатора. Недостатком такого двухосного индикаторного гиростабилизатора является то, что он не приспособлен для одновременного выполнения функции стабилизации и управления оптической аппаратурой в пространстве и функции выработки информации об углах крена и тангажа ЛА. В режиме управления двухосным индикаторным гиростабилизатором при отклонении платформы с оптико-электронным датчиком в пространстве система координат связанная с платформой, относительно которой вырабатывается информация об углах крена и тангажа, так же поворачивается в пространстве, в результате чего в выходных сигналах первого датчика угла командных сигналов и второго датчика угла командных сигналов появляется погрешность.
Наиболее близким (прототипом) является двухосный индикаторный гиростабилизатор на микромеханических гироскопах для одновременного выполнения функции стабилизации оптической аппаратуры и управления ее положением в пространстве, а так же функции выработки информации об углах крена и тангажа ЛА (ДВУХОСНЫЙ ИНДИКАТОРНЫЙ ГИРОСТАБИЛИЗАТОР Малютин Д.М. Патент на изобретение №2767715, 18.03.2022.). Двухосный индикаторный гиростабилизатор содержит наружную рамку, установленную на основании с вращением относительно оси параллельной продольной оси ЛА и расположенную в ней платформу, вращающуюся относительно оси перпендикулярной оси вращения наружной рамки, установленный на оси вращения наружной рамки первый датчик момента, вход которого соединен с выходом первого усилителя мощности, вход которого соединен с выходом третьего корректирующего фильтра, вход третьего корректирующего фильтра соединен с выходом первого корректирующего фильтра, вход первого корректирующего фильтра соединен с выходом первого сумматора, первый вход которого соединен с выходом первого микромеханического датчика угловой скорости установленного на платформе с осью чувствительности параллельной оси вращения наружной рамки двухосного индикаторного гиростабилизатора, установленный на оси вращения внутренней рамки второй датчик момента, вход которого соединен с выходом второго усилителя мощности, вход которого соединен с выходом четвертого корректирующего фильтра, вход которого соединен с выходом второго корректирующего фильтра, вход второго корректирующего фильтра соединен с выходом второго сумматора, первый вход которого соединен с выходом второго микромеханического датчика угловой скорости установленного на платформе с осью чувствительности параллельной оси вращения платформы двухосного индикаторного гиростабилизатора, первый микромеханический акселерометр, установленный на платформе с осью чувствительности параллельной оси вращения платформы двухосного индикаторного гиростабилизатора, выход которого соединен с входом первого усилителя, выход первого усилителя соединен с вторым входом первого сумматора, второй микромеханический акселерометр, установленный на платформе с осью чувствительности параллельной оси наружной рамки двухосного индикаторного гиростабилизатора, выход которого соединен с входом второго усилителя, выход второго усилителя соединен с вторым входом второго сумматора; первый датчик угла командных сигналов, установленный на оси наружной рамки двухосного индикаторного гиростабилизатора, выход которого соединен с первым входом третьего сумматора, второй датчик угла командных сигналов, установленный на оси платформы двухосного индикаторного гиростабилизатора, выход которого соединен с первым входом четвертого сумматора; оптико-электронный датчик, установленный на платформе, оптическая ось которого перпендикулярна плоскости платформы гиростабилизатора, первое устройство управления, выход которого соединен с вторым входом пятого сумматора вычислительного устройства канала наружной рамки (ВУКНР), а также соединен с третьим входом первого сумматора, выход пятого сумматора ВУКНР соединен с первым вычислительным блоком ВУКНР, выход первого вычислительного блока ВУКНР соединен с входом девятнадцатого вычислительного блока ВУКНР, выход девятнадцатого вычислительного блока ВУКНР соединен с входом второго вычислительного блока ВУКНР, выход второго вычислительного блока ВУКНР соединен с входом третьего вычислительного блока ВУКНР, выход третьего вычислительного блока ВУКНР соединен с вторым входом четвертого вычислительного блока ВУКНР, первый вход которого соединен с выходом второго датчика угла командных сигналов, а выход соединен с входом пятого вычислительного блока ВУКНР, а также соединен с входом шестого вычислительного блока ВУКНР, выход шестого вычислительного блока ВУКНР соединен с входом седьмого вычислительного блока ВУКНР, а также соединен с входом девятого вычислительного блока ВУКНР, выход которого соединен с вторым входом третьего сумматора, выход седьмого вычислительного блока ВУКНР соединен со входом восьмого вычислительного блока ВУКНР, выход которого соединен с третьим входом пятого сумматора ВУКНР, выход пятого вычислительного блока ВУКНР соединен с первым входом пятого сумматора ВУКНР; второе устройство управления, выход которого соединен с вторым входом шестого сумматора вычислительного устройства канала платформы (ВУКП), а также соединен с третьим входом второго сумматора, выход шестого сумматора ВУКП соединен с десятым вычислительным блоком ВУКП, выход десятого вычислительного блока ВУКП соединен с входом двадцатого вычислительного блока ВУКП, выход двадцатого вычислительного блока ВУКП соединен с входом одиннадцатого вычислительного блока ВУКП, выход которого соединен с входом двенадцатого вычислительного блока ВУКП, выход двенадцатого вычислительного блока ВУКП соединен с входом тринадцатого вычислительного блока ВУКП, выход которого соединен с входом четырнадцатого вычислительного блока ВУКП, а также соединен с входом пятнадцатого вычислительного блока ВУКП, выход пятнадцатого вычислительного блока ВУКП соединен с входом шестнадцатого вычислительного блока ВУКП, а также соединен с входом восемнадцатого вычислительного блока ВУКП, выход которого соединен с вторым входом четвертого сумматора, выход шестнадцатого вычислительного блока ВУКП соединен с входом семнадцатого вычислительного блока ВУКП, выход которого соединен с третьим входом шестого сумматора ВУКП, выход четырнадцатого вычислительного блока ВУКП соединен с первым входом шестого сумматора ВУКП. Недостатком прототипа являются большие погрешности стабилизации оптической аппаратуры, вызванные действием возмущающих инерционных моментов, моментов сил сухого и вязкого трения. Эти погрешности входят составной частью в итоговую погрешность определения углов крена и тангажа.
Технической задачей изобретения является увеличение точности двухосного индикаторного гиростабилизатора, при выполнении двухосным индикаторным гиростабилизатором функции стабилизации и управления оптической аппаратурой в пространстве и функции выработки информации об углах крена и тангажа ЛА.
Задача решается тем, что двухосный индикаторный гиростабилизатор содержит наружную рамку, установленную на основании с вращением относительно оси параллельной продольной оси ЛА и расположенную в ней платформу, вращающуюся относительно оси перпендикулярной оси вращения наружной рамки, установленный на оси вращения наружной рамки первый датчик момента, вход которого соединен с выходом первого усилителя мощности, вход которого соединен с выходом пятого корректирующего фильтра, вход пятого корректирующего фильтра соединен с выходом третьего корректирующего фильтра, вход третьего корректирующего фильтра соединен с выходом первого корректирующего фильтра, вход первого корректирующего фильтра соединен с выходом первого сумматора, первый вход которого соединен с выходом первого микромеханического датчика угловой скорости установленного на платформе с осью чувствительности параллельной оси вращения наружной рамки двухосного индикаторного гиростабилизатора, установленный на оси вращения внутренней рамки второй датчик момента, вход которого соединен с выходом второго усилителя мощности, вход которого соединен с выходом шестого корректирующего фильтра, вход шестого корректирующего фильтра соединен с выходом четвертого корректирующего фильтра, вход которого соединен с выходом второго корректирующего фильтра, вход второго корректирующего фильтра соединен с выходом второго сумматора, первый вход которого соединен с выходом второго микромеханического датчика угловой скорости установленного на платформе с осью чувствительности параллельной оси вращения платформы двухосного индикаторного гиростабилизатора, первый микромеханический акселерометр, установленный на платформе с осью чувствительности параллельной оси вращения платформы двухосного индикаторного гиростабилизатора, выход которого соединен с входом первого усилителя, выход первого усилителя соединен с вторым входом первого сумматора, второй микромеханический акселерометр, установленный на платформе с осью чувствительности параллельной оси наружной рамки двухосного индикаторного гиростабилизатора, выход которого соединен с входом второго усилителя, выход второго усилителя соединен с вторым входом второго сумматора; первый датчик угла командных сигналов, установленный на оси наружной рамки двухосного индикаторного гиростабилизатора, выход которого соединен с первым входом третьего сумматора, второй датчик угла командных сигналов, установленный на оси платформы двухосного индикаторного гиростабилизатора, выход которого соединен с первым входом четвертого сумматора; оптико-электронный датчик, установленный на платформе, оптическая ось которого перпендикулярна плоскости платформы гиростабилизатора, первое устройство управления, выход которого соединен с вторым входом пятого сумматора вычислительного устройства канала наружной рамки (ВУКНР), а также соединен с третьим входом первого сумматора, выход пятого сумматора ВУКНР соединен с первым вычислительным блоком ВУКНР, выход первого вычислительного блока ВУКНР соединен с входом девятнадцатого вычислительного блока ВУКНР, выход девятнадцатого вычислительного блока ВУКНР соединен с входом двадцать первого вычислительного блока ВУКНР, выход двадцать первого вычислительного блока ВУКНР соединен с входом второго вычислительного блока ВУКНР, выход второго вычислительного блока ВУКНР соединен с входом третьего вычислительного блока ВУКНР, выход третьего вычислительного блока соединен с вторым входом четвертого вычислительного блока ВУКНР, первый вход которого соединен с выходом второго датчика угла командных сигналов, а выход соединен с входом пятого вычислительного блока ВУКНР, а также соединен с входом шестого вычислительного блока ВУКНР, выход шестого вычислительного блока ВУКНР соединен с входом седьмого вычислительного блока ВУКНР, а также соединен с входом девятого вычислительного блока ВУКНР, выход которого соединен с вторым входом третьего сумматора, выход седьмого вычислительного блока ВУКНР соединен со входом восьмого вычислительного блока ВУКНР, выход которого соединен с третьим входом пятого сумматора ВУКНР, выход пятого вычислительного блока ВУКНР соединен с первым входом пятого сумматора ВУКНР; второе устройство управления, выход которого соединен с вторым входом шестого сумматора вычислительного устройства канала платформы (ВУКП), а также соединен с третьим входом второго сумматора, выход шестого сумматора ВУКП соединен с десятым вычислительным блоком ВУКП, выход десятого вычислительного блока ВУКП соединен с входом двадцатого вычислительного блока ВУКП, выход двадцатого вычислительного блока ВУКП соединен с входом двадцать второго вычислительного блока ВУКП, выход двадцать второго вычислительного блока ВУКП соединен с входом одиннадцатого вычислительного блока ВУКП, выход которого соединен с входом двенадцатого вычислительного блока ВУКП, выход двенадцатого вычислительного блока ВУКП соединен с входом тринадцатого вычислительного блока ВУКП, выход которого соединен с входом четырнадцатого вычислительного блока ВУКП, а также соединен с входом пятнадцатого вычислительного блока ВУКП, выход пятнадцатого вычислительного блока ВУКП соединен с входом шестнадцатого вычислительного блока ВУКП, а также соединен с входом восемнадцатого вычислительного блока ВУКП, выход которого соединен с вторым входом четвертого сумматора, выход шестнадцатого вычислительного блока ВУКП соединен с входом семнадцатого вычислительного блока ВУКП, выход которого соединен с третьим входом шестого сумматора ВУКП, выход четырнадцатого вычислительного блока ВУКП соединен с первым входом шестого сумматора ВУКП.
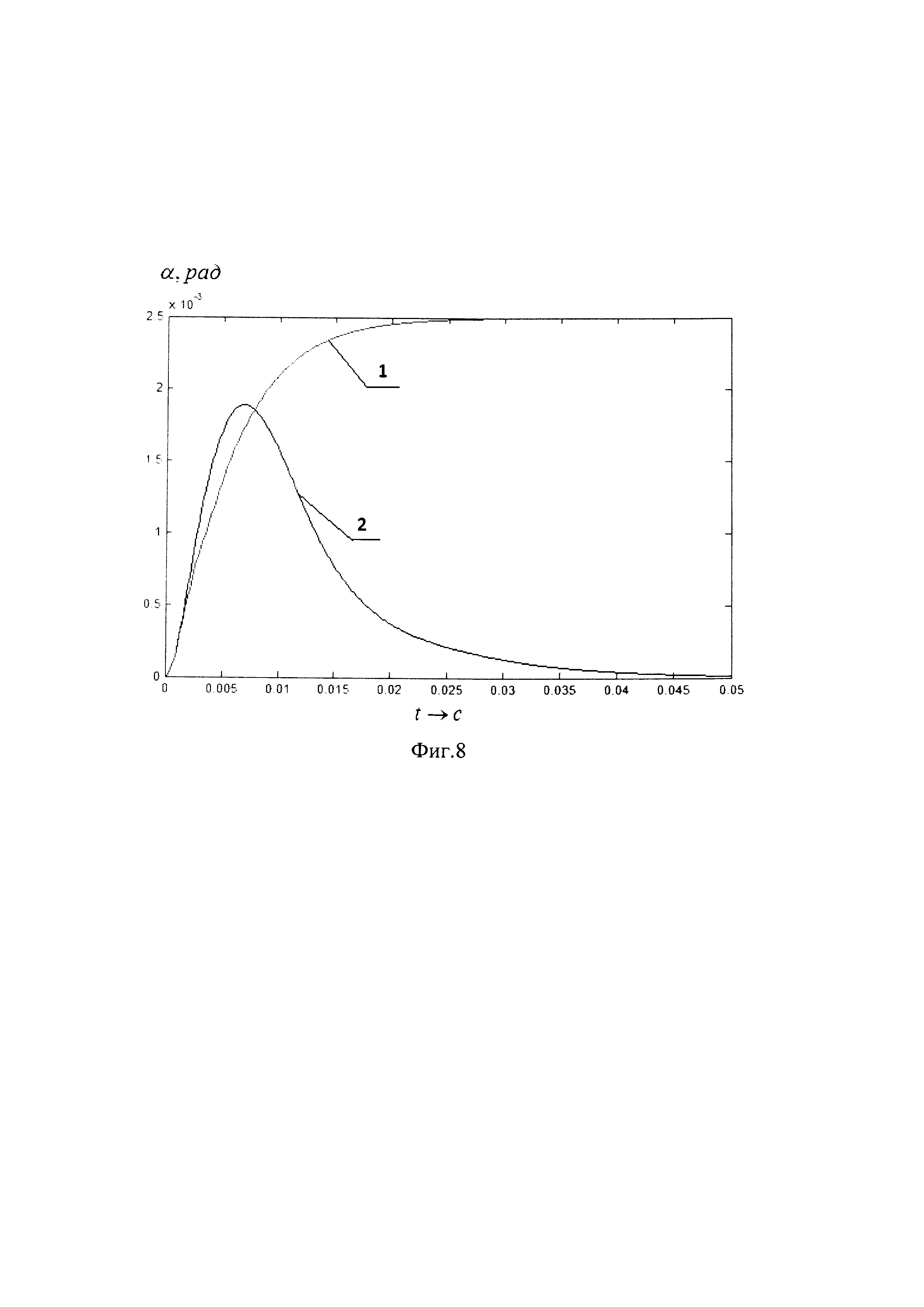
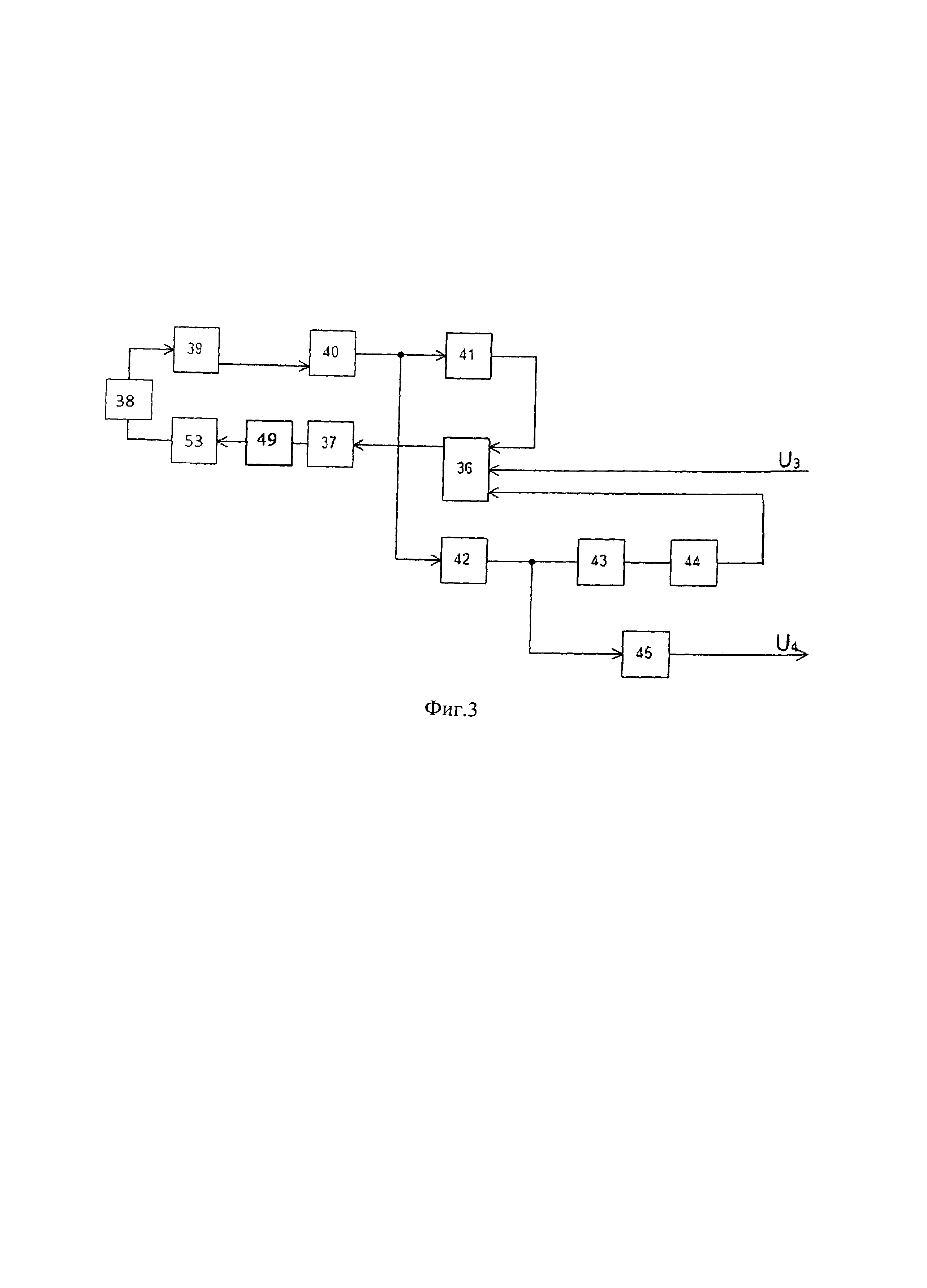
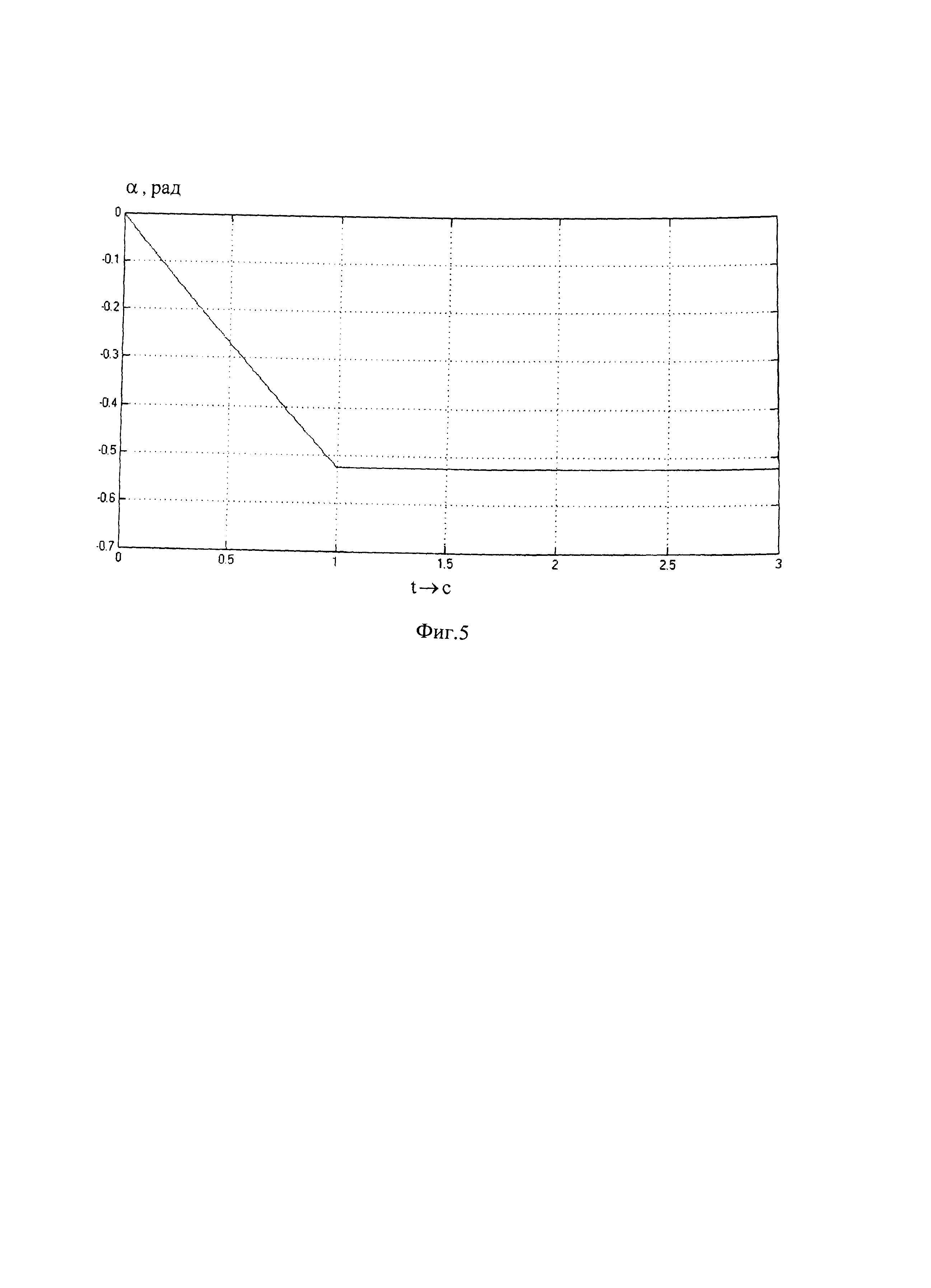
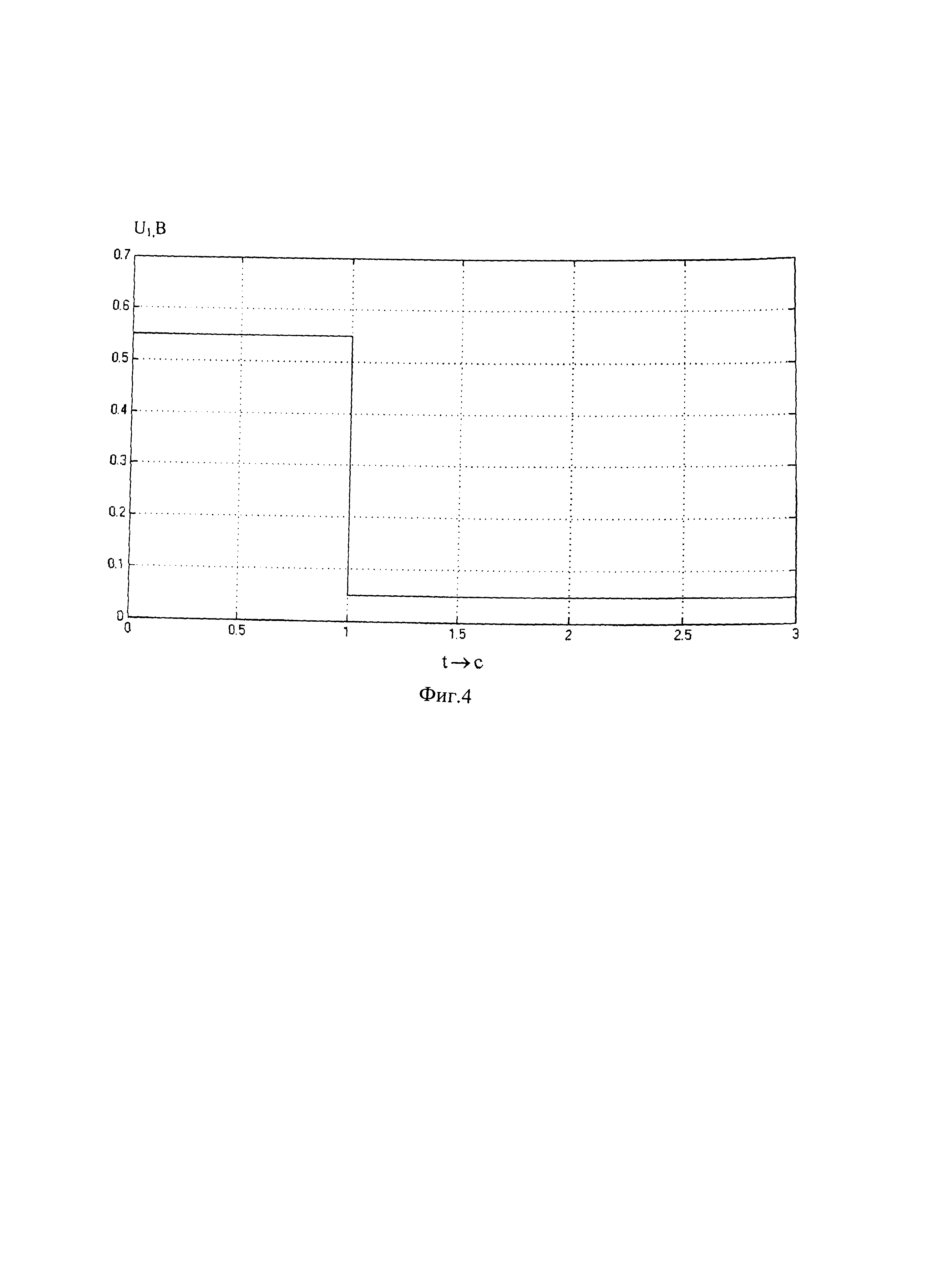
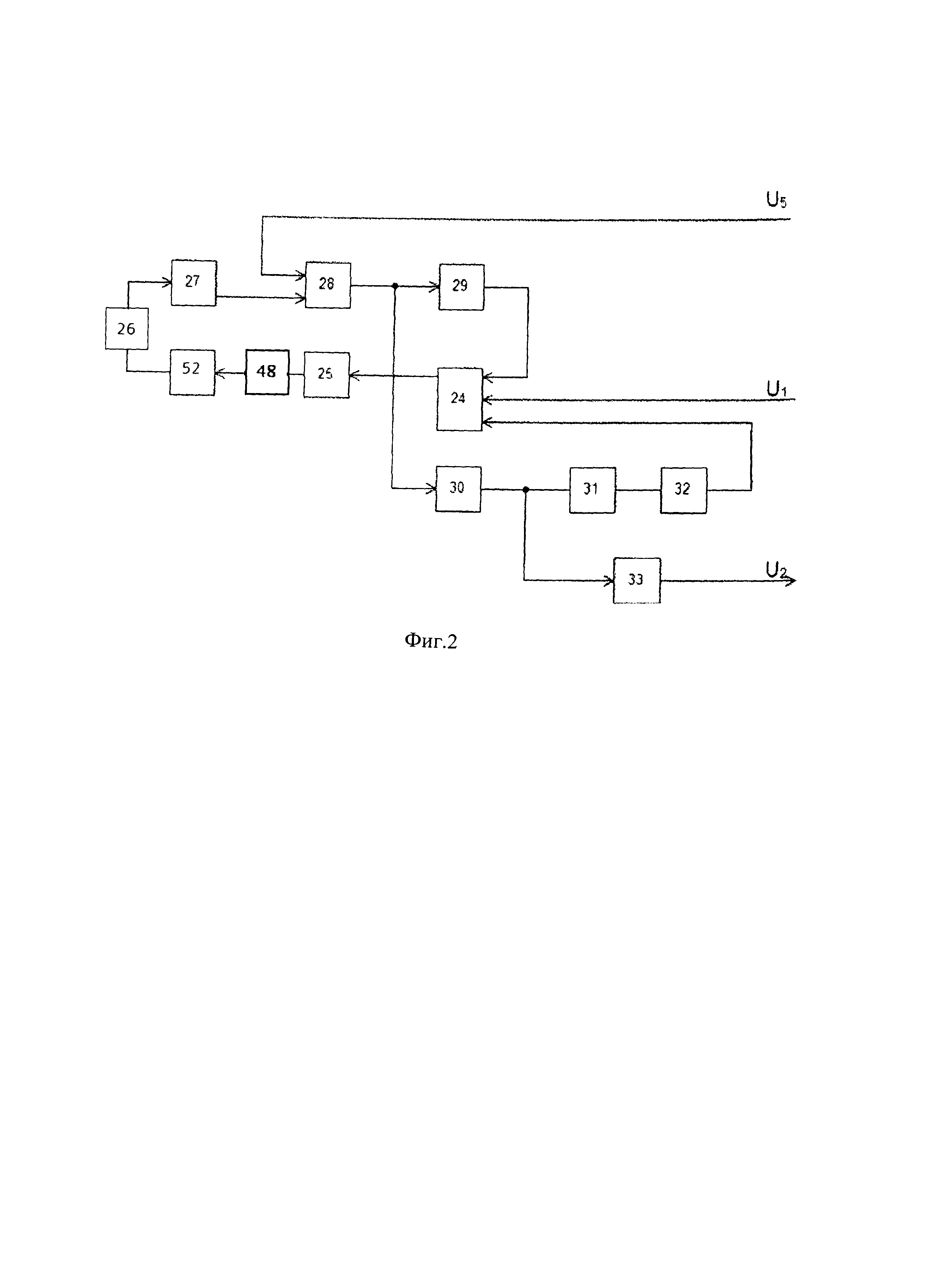
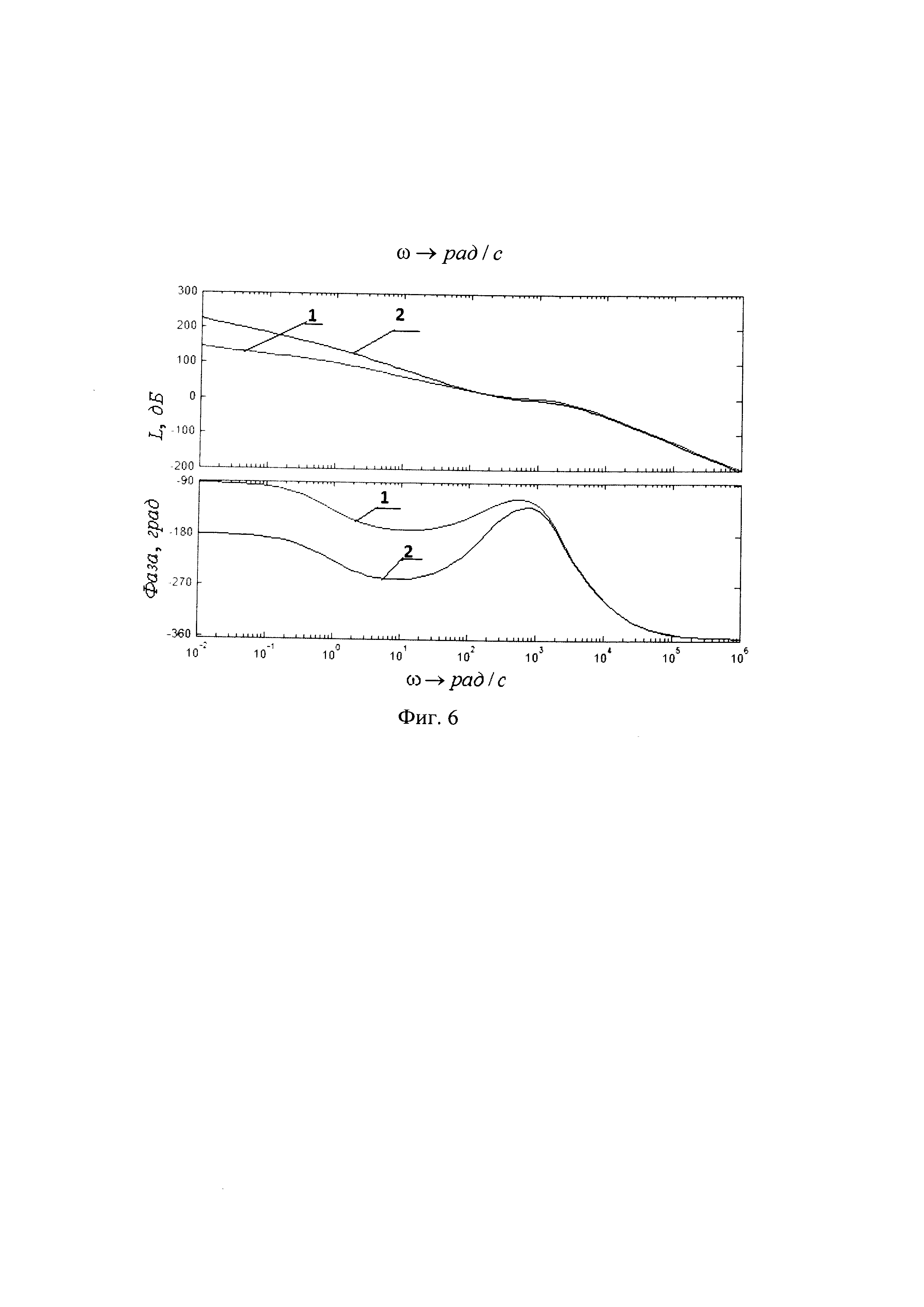
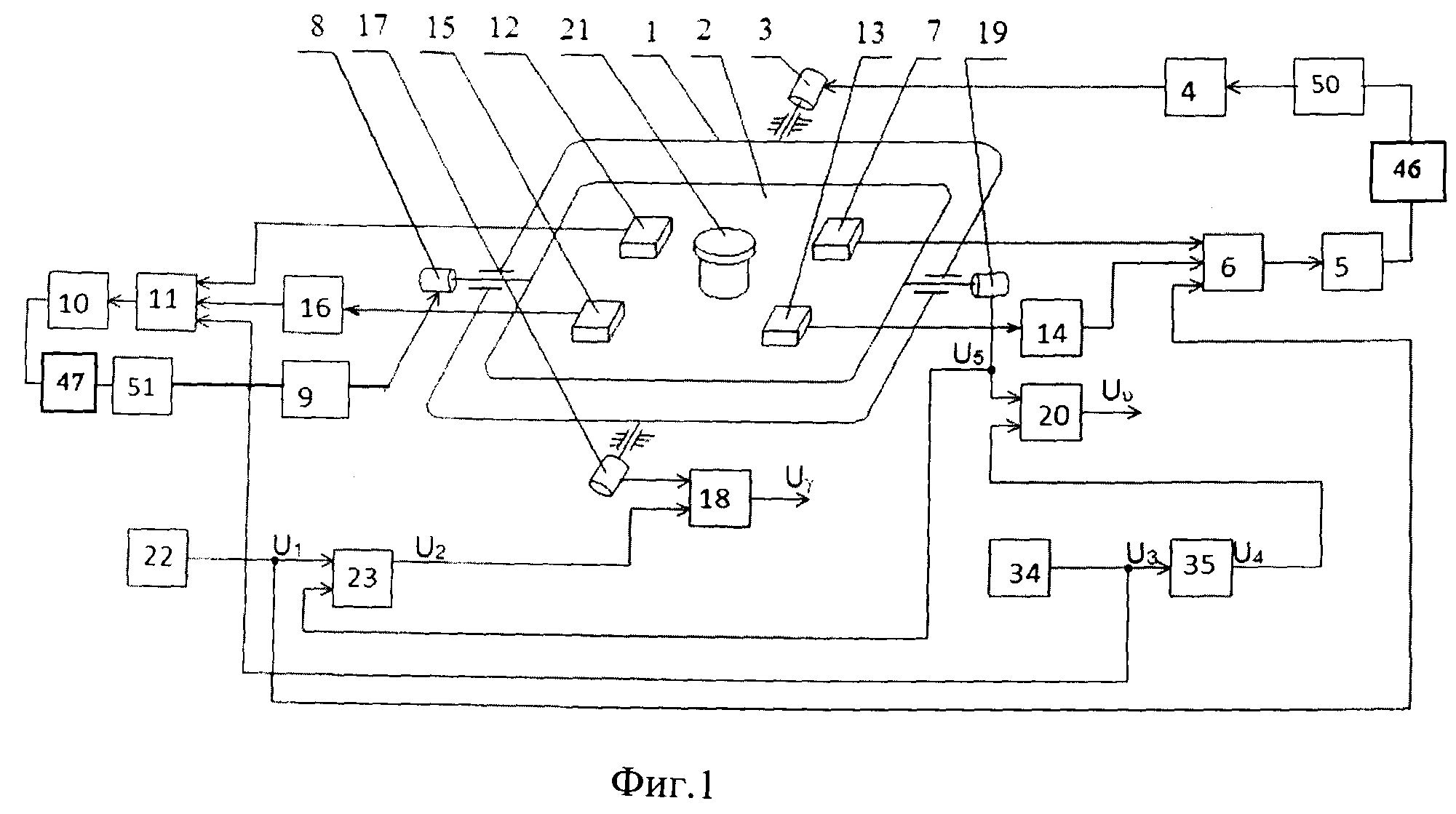
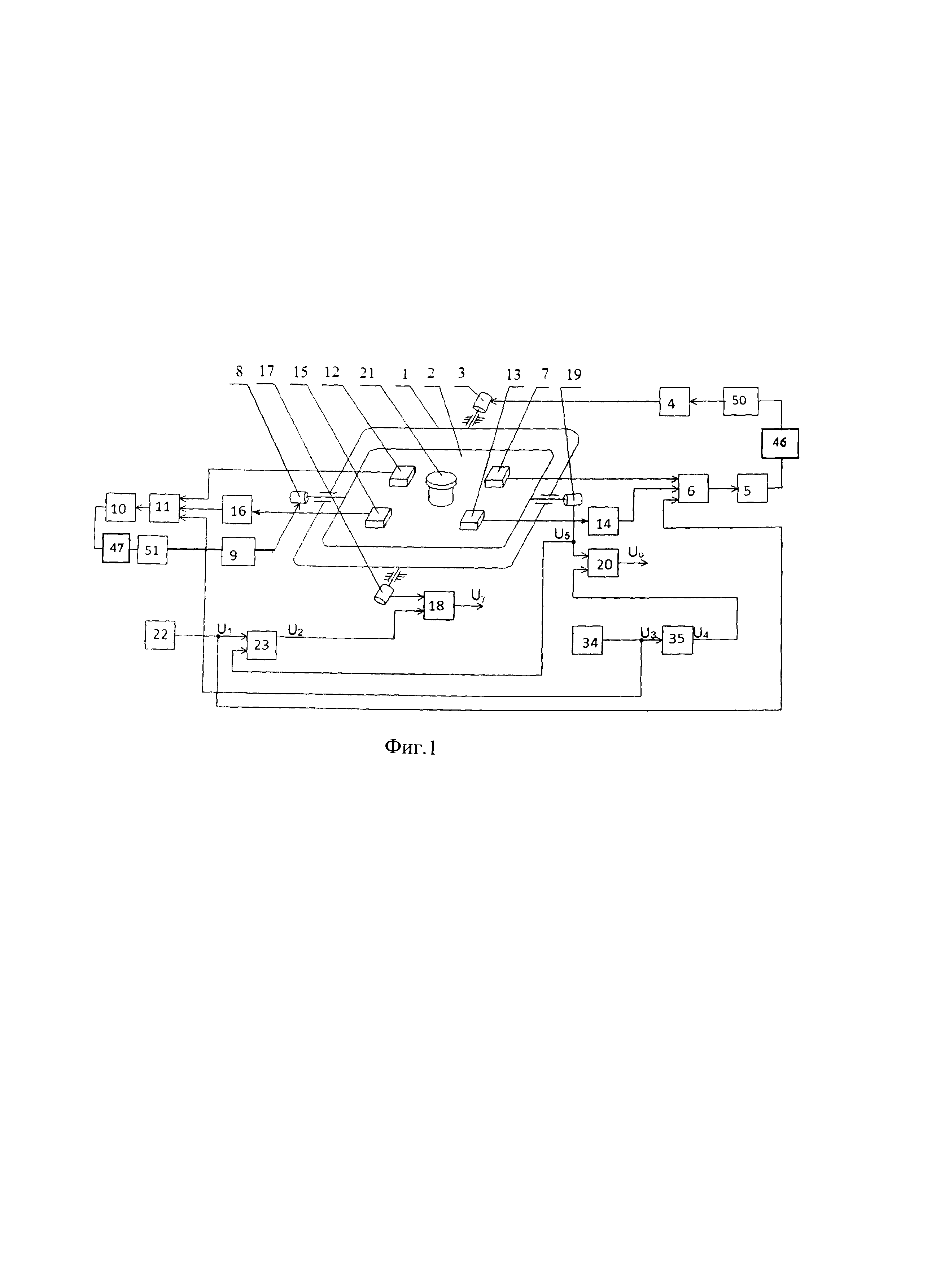
На фиг.1 изображена принципиальная схема двухосного индикаторного гиростабилизатора. На фиг.2 и фиг.3 изображены принципиальные схемы вычислительных устройств каналов наружной рамки и платформы соответственно. На фиг 4. изображен график управляющего сигнала по каналу наружной рамки. На фиг.5 изображен график процесса поворота платформы с оптико-электронным датчиком, как реакция на управляющий сигнал по каналу наружной рамки. На фиг.6 изображены графики логарифмических амплитудно фазовых частотных характеристик (ЛАФЧХ) прототипа и предлагаемого индикаторного гиростабилизатора по передаточной функции разомкнутой системы. На фиг.7 изображены графики ЛАФЧХ прототипа и предлагаемого индикаторного гиростабилизатора по передаточной функции замкнутой системы, являющейся отношением погрешности стабилизации к возмущающему моменту относительно оси наружной рамки. На фиг.8 изображены графики переходных процессов прототипа и предлагаемого индикаторного гиростабилизатора, как реакция на ступенчатый возмущающий момент относительно оси наружной рамки с амплитудой 1Нм.
Двухосный индикаторный гиростабилизатор содержит наружную рамку 1, установленную на основании с вращением относительно оси параллельной продольной оси ЛА и расположенную в ней платформу 2, вращающуюся относительно оси перпендикулярной оси вращения наружной рамки 1, установленный на оси вращения наружной рамки первый датчик момента 3, вход которого соединен с выходом первого усилителя мощности 4, вход которого соединен с выходом пятого корректирующего фильтра 50, вход пятого корректирующего фильтра 50 соединен с выходом третьего корректирующего фильтра 46, вход которого соединен с выходом первого корректирующего фильтра 5, вход первого корректирующего фильтра 5 соединен с выходом первого сумматора 6, первый вход которого соединен с выходом первого микромеханического датчика угловой скорости 7, установленного на платформе 2 с осью чувствительности параллельной оси вращения наружной рамки 1 двухосного индикаторного гиростабилизатора; установленный на оси вращения платформы 2 второй датчик момента 8, вход которого соединен с выходом второго усилителя мощности 9, вход которого соединен с выходом шестого корректирующего фильтра 51, вход шестого корректирующего фильтра 51 соединен с выходом выходом четвертого корректирующего фильтра 47, вход четвертого корректирующего фильтра 47 соединен с выходом второго корректирующего фильтра 10, вход второго корректирующего фильтра 10 соединен с выходом второго сумматора 11, первый вход которого соединен с выходом второго микромеханического датчика угловой скорости 12, установленного на платформе 2 с осью чувствительности параллельной оси вращения платформы 2 двухосного индикаторного гиростабилизатора, первый микромеханический акселерометр 13, установленный на платформе 2 с осью чувствительности параллельной оси вращения платформы двухосного индикаторного гиростабилизатора, выход которого соединен с входом первого усилителя 14, выход первого усилителя 14 соединен с вторым входом первого сумматора 6, второй микромеханический акселерометр 15, установленный на платформе 2 с осью чувствительности параллельной оси наружной рамки двухосного индикаторного гиростабилизатора, выход которого соединен с входом второго усилителя 16, выход второго усилителя 16 соединен с вторым входом второго сумматора 11; первого датчика угла командных сигналов 17, установленного на оси наружной рамки 1 двухосного индикаторного гиростабилизатора, выход которого соединен с первым входом третьего сумматора 18, второго датчика угла командных сигналов 19, установленного на оси вращения платформы 2 двухосного индикаторного гиростабилизатора, выход которого соединен с первым входом четвертого сумматора 20; оптико-электронный датчик 21, установленный на платформе 2, оптическая ось которого перпендикулярна плоскости платформы 2 двухосного индикаторного гиростабилизатора, первое устройство управления 22, выход которого соединен с вторым входом пятого сумматора 24 вычислительного устройства канала наружной рамки (ВУКНР) 23, а также соединен с третьим входом первого сумматора 6, выход пятого сумматора 24 ВУКНР 23 соединен с входом первого вычислительного блока 25 ВУКНР 23, выход первого вычислительного блока 25 ВУКНР 23 соединен с входом девятнадцатого вычислительного блока 48 ВУКНР 23, выход девятнадцатого вычислительного блока 48 ВУКНР 23 соединен с входом двадцать первого вычислительного блока 52 ВУКНР 23, выход двадцать первого вычислительного блока 52 ВУКНР соединен со входом второго вычислительного блока 26 ВУКНР 23, выход которого соединен со входом третьего вычислительного блока 27 ВУКНР 23, выход третьего вычислительного блока 27 ВУКНР 23 соединен с вторым входом четвертого вычислительного блока 28 ВУКНР 23, первый вход которого соединен с выходом второго датчика угла командных сигналов 19, а выход соединен с входом пятого вычислительного блока 29 ВУКНР 23, а также соединен с входом шестого вычислительного блока 30 ВУКНР 23, выход шестого вычислительного блока 30 ВУКНР 23 соединен с входом седьмого вычислительного блока 31 ВУКНР 23, а также соединен с входом девятого вычислительного блока 33 ВУКНР 23, выход которого соединен с вторым входом третьего сумматора 18, выход седьмого вычислительного блока 31 ВУКНР 23 соединен с входом восьмого вычислительного блока 32 ВУКНР 23, выход которого соединен с третьим входом пятого сумматора 24 ВУКНР 23, выход пятого вычислительного блока 29 ВУКНР 23 соединен с первым входом пятого сумматора 24 ВУКНР 23; второе устройство управления 34, выход которого соединен с вторым входом шестого сумматора 36 вычислительного устройства канала платформы (ВУКП) 35, а также соединен с третьим входом второго сумматора 11, выход шестого сумматора 36 ВУКП 35 соединен с входом десятого вычислительного блока 37 ВУКП 35, выход десятого вычислительного блока 37 ВУКП 35 соединен с входом двадцатого вычислительного блока 49 ВУКП 35, выход двадцатого вычислительного блока 49 ВУКП 35 соединен со входом двадцать второго вычислительного блока 53 ВУКП 35, выход двадцать второго вычислительного блока 53 ВУКП 35 соединен со входом одиннадцатого вычислительного блока 38 ВУКП 35, выход которого соединен с входом двенадцатого вычислительного блока 39 ВУКП 35, выход двенадцатого вычислительного блока 39 ВУКП 35 соединен с входом тринадцатого вычислительного блока 40 ВУКП 35, выход которого соединен с входом четырнадцатого вычислительного блока 41 ВУКП 35, а также соединен с входом пятнадцатого вычислительного блока 42 ВУКП 35, выход пятнадцатого вычислительного блока 42 ВУКП 35 соединен с входом шестнадцатого вычислительного блока 43 ВУКП 35, а также соединен с входом восемнадцатого вычислительного блока 45 ВУКП 35, выход которого соединен с вторым входом четвертого сумматора 20, выход шестнадцатого вычислительного блока 43 ВУКП 35 соединен с входом семнадцатого вычислительного блока 44 ВУКП35, выход которого соединен с третьим входом шестого сумматора 36 ВУКП 35, выход четырнадцатого вычислительного блока 41 ВУКП 35 соединен с первым входом шестого сумматора 36 ВУКП 35.
Работа устройства происходит следующим образом. При качке основания платформа 2 стремится сохранить свое положение в пространстве (в режиме стабилизации) благодаря обратной связи с первого микромеханического датчика угловой скорости 7 через первый сумматор 6, первый корректирующий фильтр 5, третий корректирующий фильтр 46, пятый корректирующий фильтр 50, первый усилитель мощности 4 на первый датчик момента 3 по каналу наружной рамки и благодаря обратной связи со второго микромеханического датчика угловой скорости 12 через второй сумматор 11, второй корректирующий фильтр 10, четвертый корректирующий фильтр 47, шестой корректирующий фильтр 51, второй усилитель мощности 9 на второй датчик момента 8 по каналу платформы. Передаточная функция первого корректирующего фильтра 5 имеет вид  что обеспечивает интегрирование сигнала первого микромеханического датчика угловой скорости 7 и требуемые запасы устойчивости по каналу наружной рамки. Здесь
что обеспечивает интегрирование сигнала первого микромеханического датчика угловой скорости 7 и требуемые запасы устойчивости по каналу наружной рамки. Здесь  - постоянная времени первого корректирующего фильтра 5, р - оператор Лапласа. Передаточная функция третьего корректирующего фильтра 46 имеет вид
- постоянная времени первого корректирующего фильтра 5, р - оператор Лапласа. Передаточная функция третьего корректирующего фильтра 46 имеет вид  что обеспечивает расширение области устойчивости и возможность увеличения коэффициента усиления по контуру стабилизации канала наружной рамки. Здесь Т3, T4 - постоянные времени третьего корректирующего фильтра 46. Передаточная функция пятого корректирующего фильтра 50 имеет вид
что обеспечивает расширение области устойчивости и возможность увеличения коэффициента усиления по контуру стабилизации канала наружной рамки. Здесь Т3, T4 - постоянные времени третьего корректирующего фильтра 46. Передаточная функция пятого корректирующего фильтра 50 имеет вид  что обеспечивает астатизм первого порядка контура стабилизации канала наружной рамки по отношению к возмущающему моменту при сохранении достаточных запасов устойчивости. Здесь Т7 - постоянная времени пятого корректирующего фильтра 50. Постоянная времени T7 пятого корректирующего фильтра 50 выбирается равной постоянной времени T1 первого корректирующего фильтра 5. Передаточная функция второго корректирующего фильтра 10 имеет вид
что обеспечивает астатизм первого порядка контура стабилизации канала наружной рамки по отношению к возмущающему моменту при сохранении достаточных запасов устойчивости. Здесь Т7 - постоянная времени пятого корректирующего фильтра 50. Постоянная времени T7 пятого корректирующего фильтра 50 выбирается равной постоянной времени T1 первого корректирующего фильтра 5. Передаточная функция второго корректирующего фильтра 10 имеет вид  что обеспечивает интегрирование сигнала второго микромеханического датчика угловой скорости 12 и требуемые запасы устойчивости по каналу платформы. Здесь Т2 - постоянная времени второго корректирующего фильтра 10. Передаточная функция четвертого корректирующего фильтра 47 имеет вид
что обеспечивает интегрирование сигнала второго микромеханического датчика угловой скорости 12 и требуемые запасы устойчивости по каналу платформы. Здесь Т2 - постоянная времени второго корректирующего фильтра 10. Передаточная функция четвертого корректирующего фильтра 47 имеет вид  что обеспечивает расширение области устойчивости и возможность увеличения коэффициента усиления по контуру стабилизации канала платформы. Здесь Т5, Т6 - постоянные времени четвертого корректирующего фильтра 47. Передаточная функция шестого корректирующего фильтра 51 имеет вид
что обеспечивает расширение области устойчивости и возможность увеличения коэффициента усиления по контуру стабилизации канала платформы. Здесь Т5, Т6 - постоянные времени четвертого корректирующего фильтра 47. Передаточная функция шестого корректирующего фильтра 51 имеет вид  что обеспечивает астатизм первого порядка контура стабилизации канала платформы по отношению к возмущающему моменту при сохранении достаточных запасов устойчивости. Здесь Т8 - постоянная времени шестого корректирующего фильтра 51. Постоянная времени Т8 шестого корректирующего фильтра 51 выбирается равной постоянной времени Т2 второго корректирующего фильтра 10. При начальном отклонении от плоскости горизонта первый микромеханический акселерометр 13 вырабатывает сигнал, пропорциональный отклонению платформы от горизонта по каналу наружной рамки, далее этот сигнал усиливается первым усилителем 14 и поступает на второй вход первого сумматора 6, что обеспечивает приведение платформы 2 к горизонту (в режиме коррекции) по каналу наружной рамки. Второй микромеханический акселерометр 15 вырабатывает сигнал, пропорциональный отклонению платформы от горизонта по каналу платформы, далее этот сигнал усиливается вторым усилителем 16 и поступает на второй вход сумматора 11, что обеспечивает приведение платформы 2 к горизонту (в режиме коррекции) по каналу платформы. При этом оптико-электронный датчик 21 расположен по направлению вертикали, а первый датчик угла командных сигналов 17 вырабатывает сигнал, пропорциональный отклонению ЛА по углу крена, который поступает на первый вход третьего сумматора 18 и далее в систему управления ЛА, второй датчик угла командных сигналов 19 вырабатывает сигнал, пропорциональный отклонению ЛА по углу тангажа, который поступает на первый вход четвертого сумматора 20 и далее в систему управления ЛА. Для отклонения оптико-электронного датчика 21 в пространстве относительно горизонта по оси наружной рамки 1 на угол α первое устройство управления 22 вырабатывает управляющий сигнал U1, который поступает на третий вход первого сумматора 6, однако поворот наружной рамки 1 с платформой 2 и оптико-электронным датчиком 21 приводит к появлению большой погрешности при выработке сигнала, пропорционального углу крена ЛА. С целью компенсации этой погрешности управляющий сигнал U1 поступает также на второй вход пятого сумматора 24 ВУКНР 23, с выхода которого сигнал поступает на вход первого вычислительного блока 25 ВУКНР 23. Первый вычислительный блок 25 ВУКНР 23 реализует передаточную функцию вида
что обеспечивает астатизм первого порядка контура стабилизации канала платформы по отношению к возмущающему моменту при сохранении достаточных запасов устойчивости. Здесь Т8 - постоянная времени шестого корректирующего фильтра 51. Постоянная времени Т8 шестого корректирующего фильтра 51 выбирается равной постоянной времени Т2 второго корректирующего фильтра 10. При начальном отклонении от плоскости горизонта первый микромеханический акселерометр 13 вырабатывает сигнал, пропорциональный отклонению платформы от горизонта по каналу наружной рамки, далее этот сигнал усиливается первым усилителем 14 и поступает на второй вход первого сумматора 6, что обеспечивает приведение платформы 2 к горизонту (в режиме коррекции) по каналу наружной рамки. Второй микромеханический акселерометр 15 вырабатывает сигнал, пропорциональный отклонению платформы от горизонта по каналу платформы, далее этот сигнал усиливается вторым усилителем 16 и поступает на второй вход сумматора 11, что обеспечивает приведение платформы 2 к горизонту (в режиме коррекции) по каналу платформы. При этом оптико-электронный датчик 21 расположен по направлению вертикали, а первый датчик угла командных сигналов 17 вырабатывает сигнал, пропорциональный отклонению ЛА по углу крена, который поступает на первый вход третьего сумматора 18 и далее в систему управления ЛА, второй датчик угла командных сигналов 19 вырабатывает сигнал, пропорциональный отклонению ЛА по углу тангажа, который поступает на первый вход четвертого сумматора 20 и далее в систему управления ЛА. Для отклонения оптико-электронного датчика 21 в пространстве относительно горизонта по оси наружной рамки 1 на угол α первое устройство управления 22 вырабатывает управляющий сигнал U1, который поступает на третий вход первого сумматора 6, однако поворот наружной рамки 1 с платформой 2 и оптико-электронным датчиком 21 приводит к появлению большой погрешности при выработке сигнала, пропорционального углу крена ЛА. С целью компенсации этой погрешности управляющий сигнал U1 поступает также на второй вход пятого сумматора 24 ВУКНР 23, с выхода которого сигнал поступает на вход первого вычислительного блока 25 ВУКНР 23. Первый вычислительный блок 25 ВУКНР 23 реализует передаточную функцию вида  параметр Tk1 которой устанавливается равным постоянной времени T1 первого корректирующего фильтра 5. Сигнал с выхода первого вычислительного блока 25 ВУКНР 23 поступает на вход девятнадцатого вычислительного блока 48 ВУКНР 23, который реализует передаточную функцию
параметр Tk1 которой устанавливается равным постоянной времени T1 первого корректирующего фильтра 5. Сигнал с выхода первого вычислительного блока 25 ВУКНР 23 поступает на вход девятнадцатого вычислительного блока 48 ВУКНР 23, который реализует передаточную функцию  где параметр Тк3 устанавливается равным постоянной времени третьего корректирующего фильтра Т3, параметр Тк4 устанавливается равным постоянной времени третьего корректирующего фильтра Т4. Сигнал с выхода девятнадцатого вычислительного блока 48 ВУКНР 23 поступает на вход двадцать первого вычислительного блока 52 ВУКНР 23, который реализует передаточную функцию
где параметр Тк3 устанавливается равным постоянной времени третьего корректирующего фильтра Т3, параметр Тк4 устанавливается равным постоянной времени третьего корректирующего фильтра Т4. Сигнал с выхода девятнадцатого вычислительного блока 48 ВУКНР 23 поступает на вход двадцать первого вычислительного блока 52 ВУКНР 23, который реализует передаточную функцию  , где параметр Tk7 устанавливается равным постоянной времени Т7 пятого корректирующего фильтра 50. Сигнал с выхода двадцать первого вычислительного блока 52 ВУКНР 23 поступает на вход второго вычислительного блока 26 ВУКНР 23, который реализует передаточную функцию вида W2(р) = Kyм1, где параметр Kyм1 устанавливается равным по величине коэффициенту передачи первого усилителя мощности 4. Сигнал с выхода второго вычислительного блока 26 ВУКНР 23 поступает на вход третьего вычислительного блока 27 ВУКНР 23, который реализует передаточную функцию вида
, где параметр Tk7 устанавливается равным постоянной времени Т7 пятого корректирующего фильтра 50. Сигнал с выхода двадцать первого вычислительного блока 52 ВУКНР 23 поступает на вход второго вычислительного блока 26 ВУКНР 23, который реализует передаточную функцию вида W2(р) = Kyм1, где параметр Kyм1 устанавливается равным по величине коэффициенту передачи первого усилителя мощности 4. Сигнал с выхода второго вычислительного блока 26 ВУКНР 23 поступает на вход третьего вычислительного блока 27 ВУКНР 23, который реализует передаточную функцию вида  где параметр
где параметр  устанавливается равным по величине коэффициенту передачи по управляющему воздействию первого датчика момента 3, а параметр Тэм1 устанавливается равным по величине электромагнитной постоянной времени первого датчика момента 3. Выходной сигнал третьего вычислительного блока 27 ВУКНР 23 поступает на второй вход четвертого вычислительного блока 28 ВУКНР 23, на первый вход которого поступает сигнал U5, пропорциональный углу отклонения платформы 2 относительно наружной рамки 1. Четвертый вычислительный блок 28 ВУКНР 23 реализует передаточную функцию вида
устанавливается равным по величине коэффициенту передачи по управляющему воздействию первого датчика момента 3, а параметр Тэм1 устанавливается равным по величине электромагнитной постоянной времени первого датчика момента 3. Выходной сигнал третьего вычислительного блока 27 ВУКНР 23 поступает на второй вход четвертого вычислительного блока 28 ВУКНР 23, на первый вход которого поступает сигнал U5, пропорциональный углу отклонения платформы 2 относительно наружной рамки 1. Четвертый вычислительный блок 28 ВУКНР 23 реализует передаточную функцию вида  где параметр передаточной функции
где параметр передаточной функции  устанавливается равным по величине коэффициенту передачи второго датчика угла командных сигналов 19, параметр
устанавливается равным по величине коэффициенту передачи второго датчика угла командных сигналов 19, параметр  устанавливается равным по величине эквивалентному моменту инерции двухосного индикаторного гиростабилизатора по каналу наружной рамки, параметр b1 устанавливается равным по величине коэффициенту вязкого трения по оси наружной рамки 1. Выходной сигнал четвертого вычислительного блока 28 ВУКНР 23 поступает на вход пятого вычислительного блока 29 ВУКНР 23 и на вход шестого вычислительного блока 30 ВУКНР 23. Пятый вычислительный блок 29 ВУКНР 23 реализует передаточную функцию вида
устанавливается равным по величине эквивалентному моменту инерции двухосного индикаторного гиростабилизатора по каналу наружной рамки, параметр b1 устанавливается равным по величине коэффициенту вязкого трения по оси наружной рамки 1. Выходной сигнал четвертого вычислительного блока 28 ВУКНР 23 поступает на вход пятого вычислительного блока 29 ВУКНР 23 и на вход шестого вычислительного блока 30 ВУКНР 23. Пятый вычислительный блок 29 ВУКНР 23 реализует передаточную функцию вида  где параметр передаточной функции Kдус1 устанавливается равным по величине коэффициенту передачи первого микромеханического датчика угловой скорости 7. Выходной сигнал пятого вычислительного блока 29 ВУКНР 23 поступает на первый вход пятого сумматора 24 ВУКНР 23. Шестой вычислительный блок 30 ВУКНР 23 осуществляет интегрирование входного сигнала и реализует передаточную функцию вида
где параметр передаточной функции Kдус1 устанавливается равным по величине коэффициенту передачи первого микромеханического датчика угловой скорости 7. Выходной сигнал пятого вычислительного блока 29 ВУКНР 23 поступает на первый вход пятого сумматора 24 ВУКНР 23. Шестой вычислительный блок 30 ВУКНР 23 осуществляет интегрирование входного сигнала и реализует передаточную функцию вида  . Выходной сигнал шестого вычислительного блока 30 ВУКНР 23 поступает на вход седьмого вычислительного блока 31 ВУКНР 23, который реализует функцию вычисления синуса входной величины, а также поступает на вход девятого вычислительного блока 33 ВУКНР 23, выходной сигнал которого U2 поступает на второй вычитающий вход третьего сумматора 18. Девятый вычислительный блок 33 ВУКНР 23 реализует передаточную функцию
. Выходной сигнал шестого вычислительного блока 30 ВУКНР 23 поступает на вход седьмого вычислительного блока 31 ВУКНР 23, который реализует функцию вычисления синуса входной величины, а также поступает на вход девятого вычислительного блока 33 ВУКНР 23, выходной сигнал которого U2 поступает на второй вычитающий вход третьего сумматора 18. Девятый вычислительный блок 33 ВУКНР 23 реализует передаточную функцию  , где параметр передаточной функции
, где параметр передаточной функции  , устанавливается равным по величине коэффициенту передачи первого датчика угла командных сигналов 17. Выходной сигнал седьмого вычислительного блока 31 ВУКНР 23 поступает на вход восьмого вычислительного блока 32 ВУКНР 23. Восьмой вычислительный блок 32 ВУКНР 23 реализует передаточную функцию вида W8(p) = gK1, где параметр g устанавливается равным величине ускорения свободного падения, а параметр K1 устанавливается равным произведению коэффициентов передачи первого микромеханического акселерометра 13 и первого усилителя 14. Выходной сигнал восьмого вычислительного блока 32 ВУКНР 23 поступает на третий вход пятого сумматора 24 ВУКНР 23. Пятый сумматор 24 ВУКНР 23, первый вычислительный блок 25 ВУКНР 23, второй вычислительный блок 26 ВУКНР 23, третий вычислительный блок 27 ВУКНР 23, четвертый вычислительный блок 28 ВУКНР 23, пятый вычислительной блок 29 ВУКНР 23, шестой вычислительный блок 30 ВУКНР 23, седьмой вычислительный блок 31 ВУКНР 23, восьмой вычислительный блок 32 ВУКНР 23, девятый вычислительный блок 33 ВУКНР 23, девятнадцатый вычислительный блок 48 ВУКНР 23, двадцать первый вычислительный блок 52 ВУКНР 23 с системой связей представляют собой нелинейную динамическую модель двухосного индикаторного гиростабилизатора с замкнутыми контуром стабилизации и замкнутым контуром коррекции по каналу наружной рамки. При подаче на второй вход пятого сумматора 24 ВУКНР 23 управляющего сигнала U1 реакция на выходе шестого вычислительного блока 30 ВУКНР 23 соответствует отклонению платформы 2 с оптико-электронным датчиком 21 в пространстве относительно горизонта по оси наружной рамки 1 на угол а. При подаче на второй вычитающий вход третьего сумматора 18 сигнала с выхода девятого вычислительного блока 33 ВУКНР 23 на выходе третьего сумматора 18 погрешность при выработке информации об угле крена ЛА будет скомпенсирована даже при больших углах поворота а платформы 2 вместе с оптико-электронным датчиком 21 не только в установившемся после поворота платформы 2 режиме, но и во время переходного режима. Сигнал
, устанавливается равным по величине коэффициенту передачи первого датчика угла командных сигналов 17. Выходной сигнал седьмого вычислительного блока 31 ВУКНР 23 поступает на вход восьмого вычислительного блока 32 ВУКНР 23. Восьмой вычислительный блок 32 ВУКНР 23 реализует передаточную функцию вида W8(p) = gK1, где параметр g устанавливается равным величине ускорения свободного падения, а параметр K1 устанавливается равным произведению коэффициентов передачи первого микромеханического акселерометра 13 и первого усилителя 14. Выходной сигнал восьмого вычислительного блока 32 ВУКНР 23 поступает на третий вход пятого сумматора 24 ВУКНР 23. Пятый сумматор 24 ВУКНР 23, первый вычислительный блок 25 ВУКНР 23, второй вычислительный блок 26 ВУКНР 23, третий вычислительный блок 27 ВУКНР 23, четвертый вычислительный блок 28 ВУКНР 23, пятый вычислительной блок 29 ВУКНР 23, шестой вычислительный блок 30 ВУКНР 23, седьмой вычислительный блок 31 ВУКНР 23, восьмой вычислительный блок 32 ВУКНР 23, девятый вычислительный блок 33 ВУКНР 23, девятнадцатый вычислительный блок 48 ВУКНР 23, двадцать первый вычислительный блок 52 ВУКНР 23 с системой связей представляют собой нелинейную динамическую модель двухосного индикаторного гиростабилизатора с замкнутыми контуром стабилизации и замкнутым контуром коррекции по каналу наружной рамки. При подаче на второй вход пятого сумматора 24 ВУКНР 23 управляющего сигнала U1 реакция на выходе шестого вычислительного блока 30 ВУКНР 23 соответствует отклонению платформы 2 с оптико-электронным датчиком 21 в пространстве относительно горизонта по оси наружной рамки 1 на угол а. При подаче на второй вычитающий вход третьего сумматора 18 сигнала с выхода девятого вычислительного блока 33 ВУКНР 23 на выходе третьего сумматора 18 погрешность при выработке информации об угле крена ЛА будет скомпенсирована даже при больших углах поворота а платформы 2 вместе с оптико-электронным датчиком 21 не только в установившемся после поворота платформы 2 режиме, но и во время переходного режима. Сигнал  с коэффициентом передачи
с коэффициентом передачи  пропорционален углу крена у ЛА. Для отклонения оптико-электронного датчика 21 в пространстве относительно горизонта по оси платформы 2 на угол Р второе устройство управления 34 вырабатывает управляющий сигнал U3, который поступает на третий вход второго сумматора 11, однако поворот платформы 2 с оптико-электронным датчиком 21 приводит к появлению большой погрешности при выработке сигнала, пропорционального углу тангажа ЛА. С целью компенсации этой погрешности управляющий сигнал U3 поступает также на второй вход шестого сумматора 36 ВУКП 35, с выхода которого сигнал поступает на вход десятого вычислительного блока 37 ВУКП 35. Десятый вычислительный блок 37 ВУКП 35 реализует передаточную функцию вида
пропорционален углу крена у ЛА. Для отклонения оптико-электронного датчика 21 в пространстве относительно горизонта по оси платформы 2 на угол Р второе устройство управления 34 вырабатывает управляющий сигнал U3, который поступает на третий вход второго сумматора 11, однако поворот платформы 2 с оптико-электронным датчиком 21 приводит к появлению большой погрешности при выработке сигнала, пропорционального углу тангажа ЛА. С целью компенсации этой погрешности управляющий сигнал U3 поступает также на второй вход шестого сумматора 36 ВУКП 35, с выхода которого сигнал поступает на вход десятого вычислительного блока 37 ВУКП 35. Десятый вычислительный блок 37 ВУКП 35 реализует передаточную функцию вида  , параметр Tk2 которой устанавливается равным постоянной времени T2 второго корректирующего фильтра 10. Сигнал с выхода десятого вычислительного блока 37 ВУКП 35 поступает на вход двадцатого вычислительного блока 49 ВУКП 35, который реализует передаточную функцию
, параметр Tk2 которой устанавливается равным постоянной времени T2 второго корректирующего фильтра 10. Сигнал с выхода десятого вычислительного блока 37 ВУКП 35 поступает на вход двадцатого вычислительного блока 49 ВУКП 35, который реализует передаточную функцию  где параметр Тк5 устанавливается равным постоянной времени четвертого корректирующего фильтра Т5, параметр Тк6 устанавливается равным постоянной времени четвертого корректирующего фильтра T6. Сигнал с выхода двадцатого вычислительного блока 49 ВУКП 35 поступает на вход двадцать второго вычислительного блока 53 ВУКП 35, который реализует передаточную функцию
где параметр Тк5 устанавливается равным постоянной времени четвертого корректирующего фильтра Т5, параметр Тк6 устанавливается равным постоянной времени четвертого корректирующего фильтра T6. Сигнал с выхода двадцатого вычислительного блока 49 ВУКП 35 поступает на вход двадцать второго вычислительного блока 53 ВУКП 35, который реализует передаточную функцию  , где параметр Tk8 устанавливается равным постоянной времени T8 шестого корректирующего фильтра 51. Сигнал с выхода двадцать второго вычислительного блока 53 ВУКП 35 поступает на вход одиннадцатого вычислительного блока 38 ВУКП 35, который реализует передаточную функцию вида
, где параметр Tk8 устанавливается равным постоянной времени T8 шестого корректирующего фильтра 51. Сигнал с выхода двадцать второго вычислительного блока 53 ВУКП 35 поступает на вход одиннадцатого вычислительного блока 38 ВУКП 35, который реализует передаточную функцию вида  где параметр
где параметр  , устанавливается равным по величине коэффициенту передачи второго усилителя мощности 9. Сигнал с выхода одиннадцатого вычислительного блока 38 ВУКП 35 поступает на вход двенадцатого вычислительного блока 39 ВУКП 35, который реализует передаточную функцию вида
, устанавливается равным по величине коэффициенту передачи второго усилителя мощности 9. Сигнал с выхода одиннадцатого вычислительного блока 38 ВУКП 35 поступает на вход двенадцатого вычислительного блока 39 ВУКП 35, который реализует передаточную функцию вида  , где параметр
, где параметр  устанавливается равным по величине коэффициенту передачи по управляющему воздействию второго датчика момента 8, а параметр
устанавливается равным по величине коэффициенту передачи по управляющему воздействию второго датчика момента 8, а параметр  устанавливается равным по величине электромагнитной постоянной времени второго датчика момента 8. Выходной сигнал двенадцатого вычислительного блока 39 ВУКП 35 поступает на вход тринадцатого вычислительного блока 40 ВУКП 35. Тринадцатый вычислительный блок 40 ВУКП 35 реализует передаточную функцию вида
устанавливается равным по величине электромагнитной постоянной времени второго датчика момента 8. Выходной сигнал двенадцатого вычислительного блока 39 ВУКП 35 поступает на вход тринадцатого вычислительного блока 40 ВУКП 35. Тринадцатый вычислительный блок 40 ВУКП 35 реализует передаточную функцию вида  где параметр
где параметр  устанавливается равным по величине эквивалентному моменту инерции двухосного индикаторного гиростабилизатора по каналу платформы, параметр b2 устанавливается равным по величине коэффициенту вязкого трения по оси платформы 2. Выходной сигнал тринадцатого вычислительного блока 40 ВУКП 35 поступает на вход четырнадцатого вычислительного блока 41 ВУКП 35 и на вход пятнадцатого вычислительного блока 42 ВУКП 35. Четырнадцатый вычислительный блок 41 ВУКП 35 реализует передаточную функцию вида
устанавливается равным по величине эквивалентному моменту инерции двухосного индикаторного гиростабилизатора по каналу платформы, параметр b2 устанавливается равным по величине коэффициенту вязкого трения по оси платформы 2. Выходной сигнал тринадцатого вычислительного блока 40 ВУКП 35 поступает на вход четырнадцатого вычислительного блока 41 ВУКП 35 и на вход пятнадцатого вычислительного блока 42 ВУКП 35. Четырнадцатый вычислительный блок 41 ВУКП 35 реализует передаточную функцию вида  , где параметр передаточной функции Kдус2 устанавливается равным по величине коэффициенту передачи второго микромеханического датчика угловой скорости 12. Выходной сигнал четырнадцатого вычислительного блока 41 ВУКП 35 поступает на первый вход шестого сумматора 36 ВУКП 35. Пятнадцатый вычислительный блок 42 ВУКП 35 осуществляет интегрирование входного сигнала и реализует передаточную функцию вида
, где параметр передаточной функции Kдус2 устанавливается равным по величине коэффициенту передачи второго микромеханического датчика угловой скорости 12. Выходной сигнал четырнадцатого вычислительного блока 41 ВУКП 35 поступает на первый вход шестого сумматора 36 ВУКП 35. Пятнадцатый вычислительный блок 42 ВУКП 35 осуществляет интегрирование входного сигнала и реализует передаточную функцию вида  . Выходной сигнал пятнадцатого вычислительного блока 42 ВУКП 35 поступает на вход шестнадцатого вычислительного блока 43 ВУКП 35, который реализует функцию вычисления синуса входной величины, а также поступает на вход восемнадцатого вычислительного блока 45 ВУКП 35, выходной сигнал которого U4 поступает на второй вычитающий вход четвертого сумматора 20. Восемнадцатый вычислительный блок 45 ВУКП 35 реализует передаточную функцию
. Выходной сигнал пятнадцатого вычислительного блока 42 ВУКП 35 поступает на вход шестнадцатого вычислительного блока 43 ВУКП 35, который реализует функцию вычисления синуса входной величины, а также поступает на вход восемнадцатого вычислительного блока 45 ВУКП 35, выходной сигнал которого U4 поступает на второй вычитающий вход четвертого сумматора 20. Восемнадцатый вычислительный блок 45 ВУКП 35 реализует передаточную функцию  , где параметр передаточной функции
, где параметр передаточной функции  устанавливается равным по величине коэффициенту передачи второго датчика угла командных сигналов 19. Выходной сигнал шестнадцатого вычислительного блока 43 ВУКП 35 поступает на вход семнадцатого вычислительного блока 44 ВУКП 35. Семнадцатый вычислительный блок 44 ВУКП 35 реализует передаточную функцию вида W16(p) = gK2, где параметр g устанавливается равным величине ускорения свободного падения, а параметр K2 устанавливается равным произведению коэффициентов передачи второго микромеханического акселерометра 15 и второго усилителя 16. Выходной сигнал семнадцатого вычислительного блока 44 ВУКП 35 поступает на третий вход шестого сумматора 36 ВУКП 35. Шестой сумматор 36 ВУКП 35, десятый вычислительный блок 37 ВУКП 35, одиннадцатый вычислительный блок 38 ВУКП 35, двенадцатый вычислительный блок 39 ВУКП 35, тринадцатый вычислительный блок 40 ВУКП 35, четырнадцатый вычислительной блок 41 ВУКП 35, пятнадцатый вычислительный блок 42 ВУКП 35, шестнадцатый вычислительный блок 43 ВУКП 35, семнадцатый вычислительный блок 44 ВУКП 35, восемнадцатый вычислительный блок 45 ВУКП 35, двадцатый вычислительный блок 49 ВУКП 35, двадцать второй вычислительный блок 53 с системой связей представляют собой нелинейную динамическую модель двухосного индикаторного гиростабилизатора с замкнутыми контуром стабилизации и замкнутым контуром коррекции по каналу платформы.
устанавливается равным по величине коэффициенту передачи второго датчика угла командных сигналов 19. Выходной сигнал шестнадцатого вычислительного блока 43 ВУКП 35 поступает на вход семнадцатого вычислительного блока 44 ВУКП 35. Семнадцатый вычислительный блок 44 ВУКП 35 реализует передаточную функцию вида W16(p) = gK2, где параметр g устанавливается равным величине ускорения свободного падения, а параметр K2 устанавливается равным произведению коэффициентов передачи второго микромеханического акселерометра 15 и второго усилителя 16. Выходной сигнал семнадцатого вычислительного блока 44 ВУКП 35 поступает на третий вход шестого сумматора 36 ВУКП 35. Шестой сумматор 36 ВУКП 35, десятый вычислительный блок 37 ВУКП 35, одиннадцатый вычислительный блок 38 ВУКП 35, двенадцатый вычислительный блок 39 ВУКП 35, тринадцатый вычислительный блок 40 ВУКП 35, четырнадцатый вычислительной блок 41 ВУКП 35, пятнадцатый вычислительный блок 42 ВУКП 35, шестнадцатый вычислительный блок 43 ВУКП 35, семнадцатый вычислительный блок 44 ВУКП 35, восемнадцатый вычислительный блок 45 ВУКП 35, двадцатый вычислительный блок 49 ВУКП 35, двадцать второй вычислительный блок 53 с системой связей представляют собой нелинейную динамическую модель двухосного индикаторного гиростабилизатора с замкнутыми контуром стабилизации и замкнутым контуром коррекции по каналу платформы.
При подаче на второй вход шестого сумматора 36 ВУКП 35 управляющего сигнала U3 реакция на выходе пятнадцатого вычислительного блока 42 ВУКП 35 соответствует отклонению платформы 2 с оптико-электронным датчиком 21 в пространстве относительно горизонта по оси платформы 2 на угол β. При подаче на второй вычитающий вход четвертого сумматора 20 сигнала с выхода восемнадцатого вычислительного блока 45 ВУКП 35 на выходе четвертого сумматора 20 погрешность при выработке информации об угле тангажа ЛА будет скомпенсирована даже при больших углах поворота β платформы 2 вместе с оптико-электронным датчиком 21 не только в установившемся после поворота платформы 2 режиме, но и во время переходного режима. Сигнал  с коэффициентом передачи
с коэффициентом передачи  пропорционален углу тангажа и ЛА.
пропорционален углу тангажа и ЛА.
На фиг.6 в качестве примера приведены ЛАФЧХ разомкнутого контура стабилизации прототипа по каналу наружной рамки (кривая 1). При этом в контуре стабилизации при коэффициенте усиления  и значении T1 = 0,006с, T3 = 0,001с, Т4 = 0,0001с на частоте среза обеспечены запасы устойчивости по фазе 68° и по амплитуде -16дБ. График ЛАФЧХ замкнутого контура стабилизации прототипа приведен на фиг.7 (кривая 1). Значение логарифмической амплитудно частотной характеристики (ЛАЧХ) передаточной функции замкнутого контура стабилизации прототипа, как отношение погрешности стабилизации к возмущающему моменту в преобразовании Лапласа в полосе пропускания составляет -53 дБ. Реакция на единичное возмущающее ступенчатое воздействие 1Нм прототипа приведена фиг.8 (кривая 1). Время переходного процесса в системе не превышает 0,02с. ЛАФЧХ разомкнутой системы предлагаемого индикаторного гиростабилизатора с параметрами
и значении T1 = 0,006с, T3 = 0,001с, Т4 = 0,0001с на частоте среза обеспечены запасы устойчивости по фазе 68° и по амплитуде -16дБ. График ЛАФЧХ замкнутого контура стабилизации прототипа приведен на фиг.7 (кривая 1). Значение логарифмической амплитудно частотной характеристики (ЛАЧХ) передаточной функции замкнутого контура стабилизации прототипа, как отношение погрешности стабилизации к возмущающему моменту в преобразовании Лапласа в полосе пропускания составляет -53 дБ. Реакция на единичное возмущающее ступенчатое воздействие 1Нм прототипа приведена фиг.8 (кривая 1). Время переходного процесса в системе не превышает 0,02с. ЛАФЧХ разомкнутой системы предлагаемого индикаторного гиростабилизатора с параметрами  Т1 = 0,006с, Т3 = 0,001с, Т4 = 0,0001с, Т7 = 0,006с приобретает вид, представленный на фиг.6 (кривая 2). При этом обеспечены запасы устойчивости по фазе 50 град и -10дБ по амплитуде. ЛАФЧХ замкнутого контура стабилизации предлагаемого индикаторного гиростабилизатора при установке пятого корректирующего фильтра 50 представлена на фиг.7 (кривая 2). Из приведенных графиков видно, что ЛАЧХ передаточной функции замкнутого контура стабилизации предлагаемого индикаторного гиростабилизатора, как отношение погрешности стабилизации к возмущающему моменту в преобразовании Лапласа, в полосе пропускания имеет наклон -20дБ/дек, что соответствует астатизму первого порядка по отношению к возмущающему моменту и располагается ниже ЛАЧХ прототипа (например, при частоте качки основания 10 рад/с значение ЛАЧХ составляет -72 дБ, а у прототипа -53дБ). График реакции в контуре стабилизации предлагаемого индикаторного гиростабилизатора на единичное ступенчатое возмущающее воздействие 1Нм представлен на фиг.8 (кривая 2). При этом погрешность стабилизации у предлагаемого индикаторного гиростабилизатора в установившемся режиме равна нулю, а в переходном процессе по сравнению с прототипом уменьшена в 1,4 раза. Аналогично за счет установки шестого корректирующего фильтра 51 удается уменьшить погрешность стабилизации по каналу платформы.
Т1 = 0,006с, Т3 = 0,001с, Т4 = 0,0001с, Т7 = 0,006с приобретает вид, представленный на фиг.6 (кривая 2). При этом обеспечены запасы устойчивости по фазе 50 град и -10дБ по амплитуде. ЛАФЧХ замкнутого контура стабилизации предлагаемого индикаторного гиростабилизатора при установке пятого корректирующего фильтра 50 представлена на фиг.7 (кривая 2). Из приведенных графиков видно, что ЛАЧХ передаточной функции замкнутого контура стабилизации предлагаемого индикаторного гиростабилизатора, как отношение погрешности стабилизации к возмущающему моменту в преобразовании Лапласа, в полосе пропускания имеет наклон -20дБ/дек, что соответствует астатизму первого порядка по отношению к возмущающему моменту и располагается ниже ЛАЧХ прототипа (например, при частоте качки основания 10 рад/с значение ЛАЧХ составляет -72 дБ, а у прототипа -53дБ). График реакции в контуре стабилизации предлагаемого индикаторного гиростабилизатора на единичное ступенчатое возмущающее воздействие 1Нм представлен на фиг.8 (кривая 2). При этом погрешность стабилизации у предлагаемого индикаторного гиростабилизатора в установившемся режиме равна нулю, а в переходном процессе по сравнению с прототипом уменьшена в 1,4 раза. Аналогично за счет установки шестого корректирующего фильтра 51 удается уменьшить погрешность стабилизации по каналу платформы.
Из приведенных графиков следует, что погрешность стабилизации предлагаемого индикаторного гиростабилизатора уменьшена в полосе пропускания по сравнению с прототипом, а следовательно уменьшена и погрешность определения углов крена и тангажа.
Таким образом, совокупность признаков предлагаемого устройства двухосного индикаторного гиростабилизатора, реализация которых может быть выполнена в соответствии с фиг.1, 2, 3 позволяет увеличить точность функционирования многофункционального двухосного индикаторного гиростабилизатора, при одновременном выполнении двухосным индикаторным гиростабилизатором функции стабилизации и управления оптической аппаратурой в пространстве и функции выработки информации об углах крена и тангажа ЛА.
Изобретение выполнено при финансовой поддержке гранта Правительства Тульской области в сфере науки и техники. Договор ДС/110 от 22 июля 2022 года.
Двухосный индикаторный гиростабилизатор, содержащий наружную рамку, установленную на основании с вращением относительно оси параллельной продольной оси летательного аппарата и расположенную в ней платформу, вращающуюся относительно оси перпендикулярной оси вращения наружной рамки, установленный на оси вращения наружной рамки первый датчик момента, вход которого соединен с выходом первого усилителя мощности, третьего корректирующего фильтра, вход которого соединен с выходом первого корректирующего фильтра, вход первого корректирующего фильтра соединен с выходом первого сумматора, первый вход которого соединен с выходом первого микромеханического датчика угловой скорости установленного на платформе с осью чувствительности параллельной оси вращения наружной рамки двухосного индикаторного гиростабилизатора, установленный на оси вращения внутренней рамки второй датчик момента, вход которого соединен с выходом второго усилителя мощности, четвертого корректирующего фильтра, вход которого соединен с выходом второго корректирующего фильтра, вход второго корректирующего фильтра соединен с выходом второго сумматора, первый вход которого соединен с выходом второго микромеханического датчика угловой скорости установленного на платформе с осью чувствительности параллельной оси вращения платформы двухосного индикаторного гиростабилизатора, первый микромеханический акселерометр, установленный на платформе с осью чувствительности параллельной оси вращения платформы двухосного индикаторного гиростабилизатора, выход которого соединен с входом первого усилителя, выход первого усилителя соединен со вторым входом первого сумматора, второй микромеханический акселерометр, установленный на платформе с осью чувствительности параллельной оси наружной рамки двухосного индикаторного гиростабилизатора, выход которого соединен с входом второго усилителя, выход второго усилителя соединен со вторым входом второго сумматора, первый датчик угла командных сигналов, установленный на оси наружной рамки двухосного индикаторного гиростабилизатора, выход которого соединен с первым входом третьего сумматора, второй датчик угла командных сигналов, установленный на оси платформы двухосного индикаторного гиростабилизатора, выход которого соединен с первым входом четвертого сумматора; оптико-электронный датчик, установленный на платформе, оптическая ось которого перпендикулярна плоскости платформы гиростабилизатора, первое устройство управления, выход которого соединен с вторым входом пятого сумматора вычислительного устройства канала наружной рамки (ВУКНР), а также соединен с третьим входом первого сумматора, выход пятого сумматора ВУКНР соединен с первым вычислительным блоком ВУКНР, выход первого вычислительного блока ВУКНР соединен с входом девятнадцатого вычислительного блока ВУКНР, второй вычислительный блок ВУКНР, выход которого соединен с входом третьего вычислительного блока ВУКНР, выход третьего вычислительного блока ВУКНР соединен с вторым входом четвертого вычислительного блока ВУКНР, первый вход которого соединен с выходом второго датчика угла командных сигналов, а выход соединен с входом пятого вычислительного блока ВУКНР, а также соединен с входом шестого вычислительного блока ВУКНР, выход шестого вычислительного блока ВУКНР соединен с входом седьмого вычислительного блока ВУКНР, а также соединен с входом девятого вычислительного блока ВУКНР, выход которого соединен с вторым входом третьего сумматора, выход седьмого вычислительного блока ВУКНР соединен с входом восьмого вычислительного блока ВУКНР, выход восьмого вычислительного блока соединен с третьим входом пятого сумматора, выход пятого вычислительного блока ВУКНР соединен с первым входом пятого сумматора ВУКНР; второе устройство управления, выход которого соединен с вторым входом шестого сумматора вычислительного устройства канала платформы (ВУКП), а также соединен с третьим входом второго сумматора, выход шестого сумматора ВУКП соединен с десятым вычислительным блоком ВУКП, выход десятого вычислительного блока ВУКП соединен с входом двадцатого вычислительного блока ВУКП, одиннадцатый вычислительный блок ВУКП, выход которого соединен с входом двенадцатого вычислительного блока ВУКП, выход двенадцатого вычислительного блока ВУКП соединен с входом тринадцатого вычислительного блока ВУКП, выход которого соединен с входом четырнадцатого вычислительного блока ВУКП, а также соединен с входом пятнадцатого вычислительного блока ВУКП, выход пятнадцатого вычислительного блока ВУКП соединен с входом шестнадцатого вычислительного блока ВУКП, а также соединен с входом восемнадцатого вычислительного блока ВУКП, выход которого соединен с вторым входом четвертого сумматора, выход шестнадцатого вычислительного блока ВУКП соединен с входом семнадцатого вычислительного блока ВУКП, выход семнадцатого вычислительного блока соединен с третьим входом шестого сумматора, выход четырнадцатого вычислительного блока ВУКП соединен с первым входом шестого сумматора ВУКП, отличающийся тем, что в него дополнительно введены пятый корректирующий фильтр, шестой корректирующий фильтр, двадцать первый вычислительный блок ВУКНР, двадцать второй вычислительный блок ВУКП, причем выход пятого корректирующего фильтра соединен с входом первого усилителя мощности, вход пятого корректирующего фильтра соединен с выходом третьего корректирующего фильтра, выход шестого корректирующего фильтра соединен с входом второго усилителя мощности, вход шестого корректирующего фильтра соединен с выходом четвертого корректирующего фильтра, выход двадцать первого вычислительного блока ВУКНР соединен с входом второго вычислительного блока ВУКНР, вход двадцать первого вычислительного блока ВУКНР соединен с выходом девятнадцатого вычислительного блока ВУКНР, выход двадцать второго вычислительного блока ВУКП соединен с входом одиннадцатого вычислительного блока ВУКП, вход двадцать второго вычислительного блока ВУКП соединен с выходом двадцатого вычислительного блока ВУКП.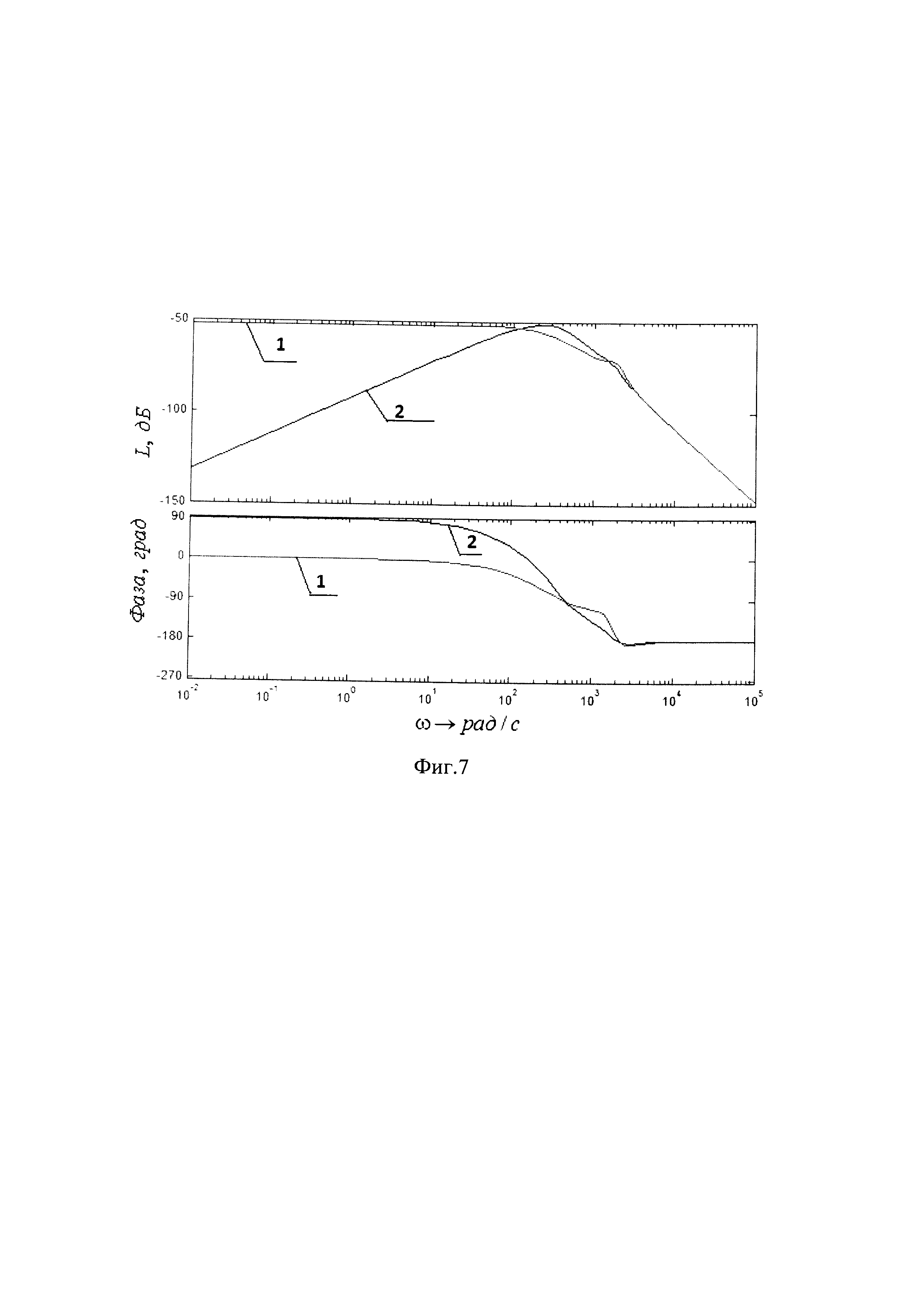
Компенсационный акселерометр
Способ изготовления и конструкция стреловидной пули повышенного останавливающего действия
Устройство подачи импульсов электрического тока в зону резания при точении металлов
Способ гидроабразивной очистки поверхностей от загрязнений
Устройство возбуждения генератора и контроля качества генерируемой электрической энергии вентильно-реактивным генератором
Устройство для магнитно-импульсной штамповки
Устройство для магнитно-импульсной штамповки
Устройство для вытяжки цилиндрических оболочек из листовых металлов с плоскостной анизотропией механических свойств
Устройство для магнитно-импульсной штамповки
Устройство для магнитно-импульсной штамповки
Двухосный индикаторный гиростабилизатор
Двухосный индикаторный гиростабилизатор

