Результат интеллектуальной деятельности: СПОСОБ ЭКСПЛУАТАЦИИ КАНАТНОЙ ДОРОГИ
Вид РИД
Изобретение
Способ эксплуатации канатной дороги, в котором канатная дорога находится под управлением системы управления канатной дорогой для перемещения множества кабин между первой станцией и второй станцией и в котором по меньшей мере один блок контроля функции контролирует функцию канатной дороги, связанную с кабиной.
Канатная дорога для перевозки людей или объектов, как правило, имеет множество блоков контроля функций для обеспечения надлежащего функционирования канатной дороги. Не имеет значения, к какому типу относится канатная дорога. Это может быть воздушная канатная дорога, например, в виде гондольного подъемника, кресельного подъемника, или воздушный трамвай, в котором перемещаются кабины, подвешенные на опоре или тяговом канате, или рельсовая канатная дорога, например, фуникулер, в котором кабины перемещаются по стационарному пути. Во всех типах кабины приводятся в движение канатом канатной дороги.
В зависимости от того, какая функция контролируется блоком контроля функции, система управления канатной дорогой инициирует конкретное действие в случае обнаружения неисправности. Это может быть, например, предупреждение или сообщение об ошибке для обслуживающего персонала, но также это может быть остановка канатной дороги в случае угрозы безопасности. Часто обслуживающий персонал должен подтвердить неисправность в системе управления канатной дорогой, чтобы возобновить работу канатной дороги. Кроме того, может потребоваться, чтобы обслуживающий персонал вручную исправил неисправное состояние перед возобновлением работы. В зависимости от того, какая функция контролируется блоком контроля функции, блок контроля функции может быть расположен в конкретном месте канатной дороги, в частности, не только на станции канатной дороги, но также на пути, например, на опоре подъемника в случае воздушной канатной дороги.
Устранение неисправностей канатной дороги может быть очень дорогостоящим из–за сложности канатной дороги. Даже если эксплуатация канатной дороги возможна после ошибки, определенные ошибки могут возникать постоянно или часто, что, разумеется, требует не менее частого вмешательства обслуживающего персонала.
Из документа JP2005/335488 A1 известно сохранение значений измерения усилия зажимной пружины зажима отсоединяемой кабины канатной дороги вместе с уникальным идентификатором кабины в базе данных. Это обеспечивает последующий анализ сохраненных записей данных для обнаружения постепенного изменения усилия пружины.
Разумеется, канатная дорога также должна регулярно обслуживаться. В документе US 5,363,316 A предложена уникальная идентификация каждой кабины для определения времени работы каждой кабины. Таким образом, техническое обслуживание, в частности, техническое обслуживание кабин, может быть запланировано целевым образом. Однако это не решает проблему контроля конкретной функции или устранения неисправностей.
В связи с этим задача настоящего изобретения заключается в обеспечении способа, за счет которого упрощается устранение неисправностей канатной дороги во время работы канатной дороги.
Эта задача решается путем присвоения каждой кабине уникального идентификатора кабины, причем идентификатор каждой кабины известен системе управления канатной дорогой, по меньшей мере один блок контроля функции передает неисправности, инициированные кабинами во время работы канатной дороги, в систему управления канатной дорогой в сообщении о состоянии функции, система управления канатной дорогой присваивает принятую неисправность инициировавшей кабине, и неисправности сохраняют вместе с идентификатором инициировавшей кабины в системе управления канатной дорогой и оценивают. Сохранение неисправностей вместе с уникальным идентификатором кабины упрощает устранение неисправностей канатной дороги, поскольку это обеспечивает указание возможного местоположения ошибки и инициировавшей кабины. В частности, в случае канатных дорог с множеством кабин это может значительно упрощать устранение неисправностей.
Если в системе управления канатной дорогой анализируют частоту неисправности конкретного блока контроля функции, инициированной одной и той же кабиной, можно легко определить, ответственны ли определенные кабины за неисправность, которая затем может быть конкретно проверена или устранена.
Если в системе управления канатной дорогой анализируют частоту неисправностей конкретного блока контроля функции, инициированных разными кабинами, можно легко определить, имеется ли, и где может находиться техническая проблема или дефект канатной дороги, который затем может быть конкретно проверен и исправлен.
Устранение неисправностей может быть улучшено, если с помощью блока контроля функции обнаруживают по меньшей мере один параметр кабины для кабин, и, если обнаруженные параметры кабин передают в систему управления канатной дорогой в сообщении о состоянии функции, где параметры кабины присваивают инициировавшей кабине и сохраняют вместе с идентификатором инициировавшей кабины и оценивают.
Если в системе управления канатной дорогой оценивают тенденцию изменения параметра кабины, полученного конкретным блоком контроля функции, конкретной кабины с течением времени, можно легко обнаружить дефект кабины, и затем кабина может быть конкретно проверена или изъята, или может быть запланировано более тщательное техническое обслуживание кабины.
Если в системе управления канатной дорогой оценивают параметры кабины конкретного блока контроля функции и разных кабин, можно легко определить, имеется ли, и где может находиться техническая проблема или дефект канатной дороги, который затем может быть конкретно проверен и исправлен.
Для обеспечения возможности гибкого реагирования на неисправность система управления канатной дорогой может инициировать действие в зависимости от принятого сообщения о неисправности. Действия предпочтительно могут быть сконфигурированы в системе управления канатной дорогой.
Для того, чтобы система управления канатной дорогой знала идентификаторы кабин, идентификаторы кабин можно обнаруживать во время загрузки канатной дороги кабинами, причем обнаруженные идентификаторы кабин передают в систему управления канатной дорогой. Таким образом, система управления канатной дорогой может легко узнавать идентификаторы кабин перед запуском канатной дороги. Однако альтернативно или дополнительно по меньшей мере один блок контроля функции может обнаруживать идентификатор кабины и передавать его в систему управления канатной дорогой предпочтительно вместе с неисправностью и/или параметром кабины в сообщении о состоянии функции. Таким образом, система управления канатной дорогой также может принимать идентификаторы кабин во время работы и использовать их, например, для подтверждения сохраненных идентификаторов кабин.
В предпочтительном варианте выполнения с помощью блока контроля функции обнаруживают усилие пружины зажима кабины, и обнаруженное усилие пружины передают в сообщении о состоянии функции в систему управления канатной дорогой в качестве параметра кабины. В этом варианте выполнения блок контроля функции может передавать сообщение о состоянии функции о неисправности в систему управления канатной дорогой, когда обнаруженное усилие пружины опускается ниже заданного предела.
В дополнительном предпочтительном варианте выполнения с помощью блока контроля функции контролируют прохождение кабины через определенную зону прохождения на станции или между двумя станциями, и обнаруживают время прохождения или расстояние, пройденное по канату, для прохождения через зону прохождения и передают его в качестве параметра кабины в сообщении о состоянии функции в систему управления канатной дорогой. Блок контроля функции может передавать сообщение о состоянии функции о неисправности в систему управления канатной дорогой, когда кабина движется слишком медленно или слишком быстро через зону прохождения относительно заданного временного окна или заданного диапазона расстояния по канату.
В дополнительном предпочтительном варианте выполнения с помощью блока контроля функции контролируют блокировку двери или удерживающей перекладины кабины и передают сообщение о состоянии функции о неисправности в систему управления канатной дорогой при обнаружении неисправной блокировки двери или удерживающей перекладины.
В дополнительном предпочтительном варианте выполнения с помощью блока контроля функции контролируют обогреватель сиденья кабины и передают энергопотребление обогревателя сиденья в систему управления канатной дорогой в сообщение о состоянии функции в качестве параметра кабины. Блок контроля функции может передавать сообщение о состоянии функции о неисправности в систему управления канатной дорогой, когда обнаруженное энергопотребление опускается ниже или превышает заданный предел.
В дополнительном предпочтительном варианте выполнения с помощью блока контроля функции контролируют барьер и передают сообщение о состоянии функции о неисправности в систему управления канатной дорогой, когда кабина инициирует барьер.
Настоящее изобретение описано более подробно ниже со ссылкой на Фигуры 1–4, которые иллюстрируют примерные, схематические и неограничивающие предпочтительные варианты выполнения изобретения. На чертежах
Фиг. 1 иллюстрирует станцию канатной дороги,
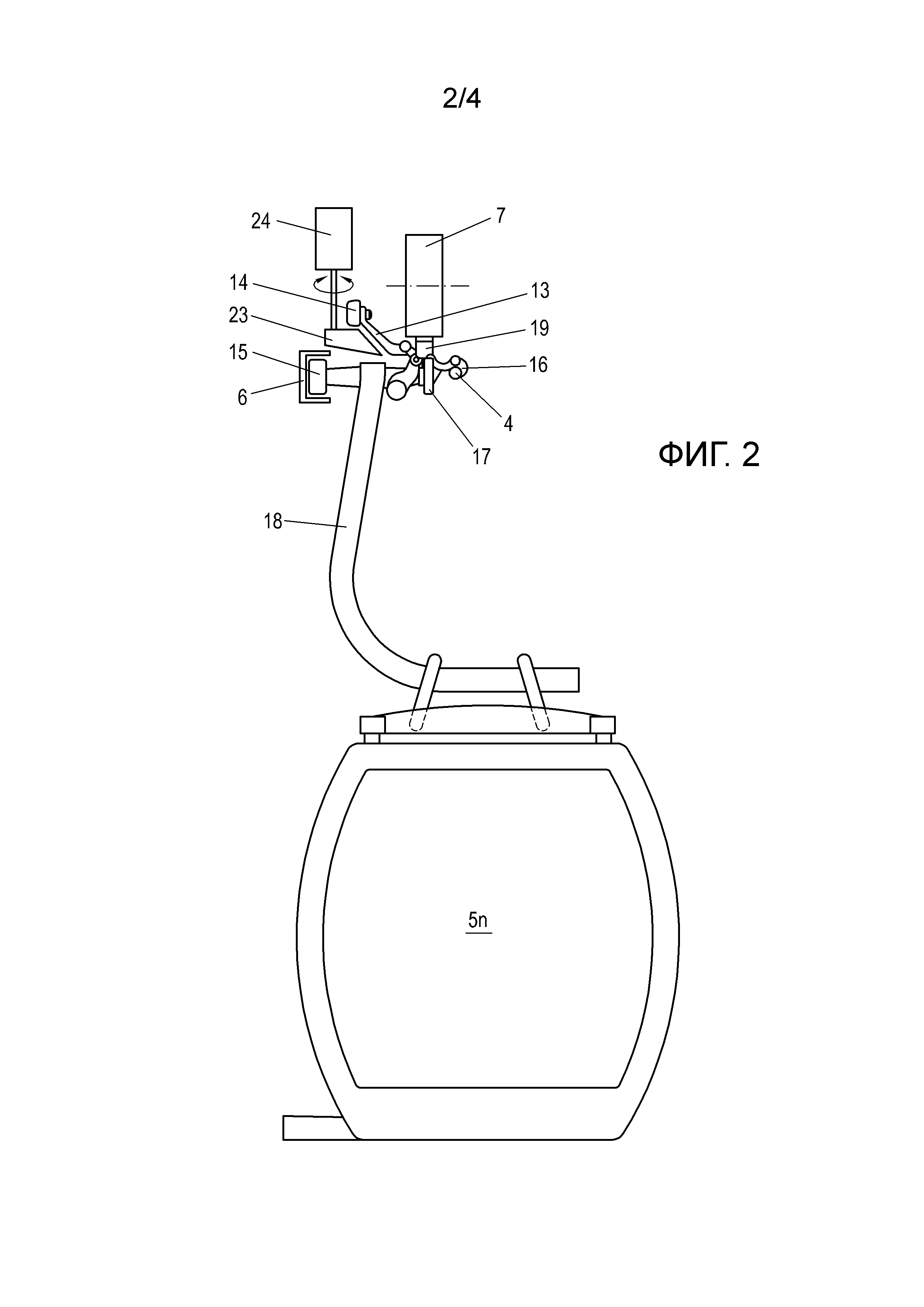
Фиг. 2 иллюстрирует кабину канатной дороги,
Фиг. 3 иллюстрирует использование радиотранспондера для считывания идентификатора кабины, и
Фиг. 4 иллюстрирует другие блоки контроля функций на станции канатной дороги.
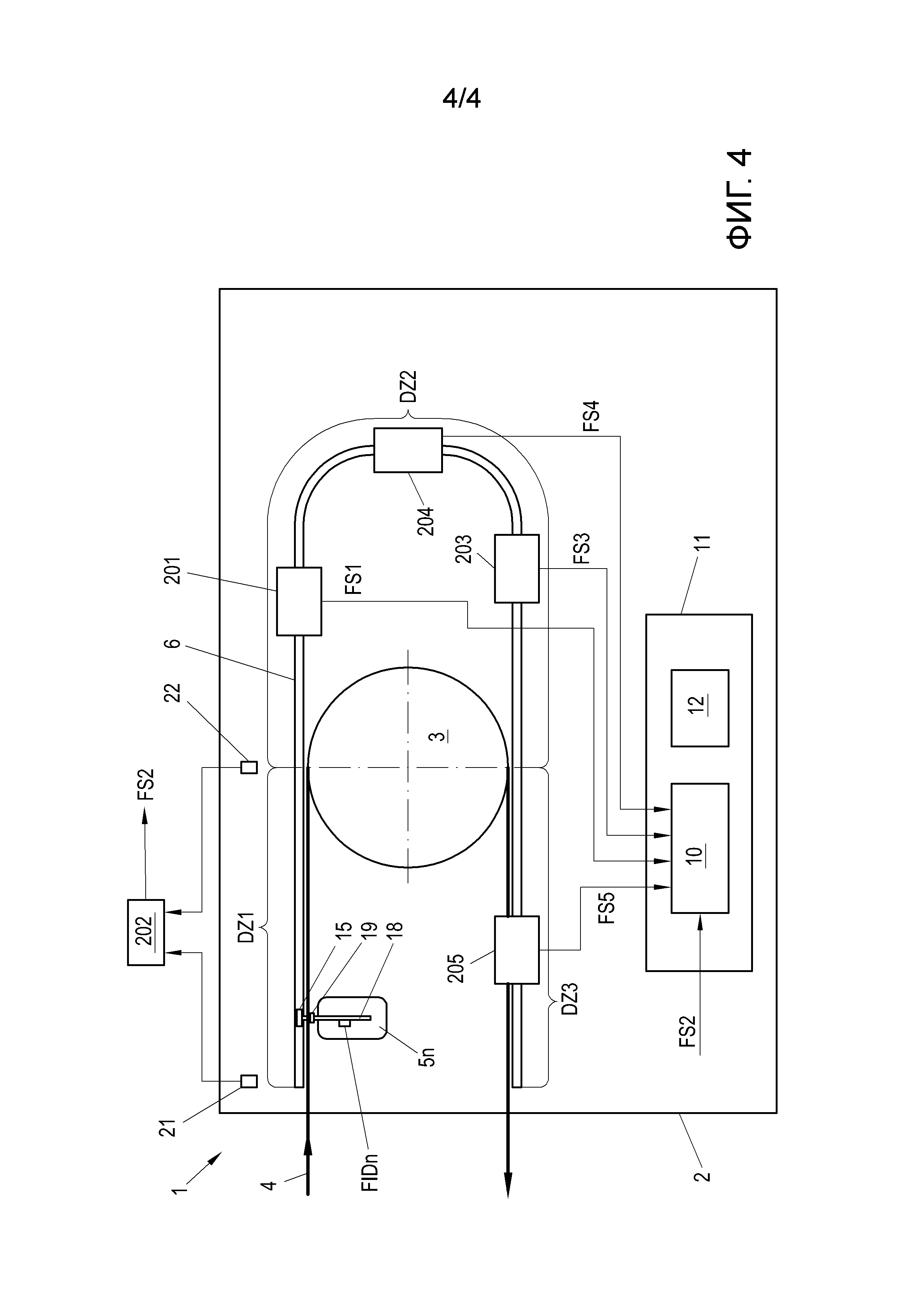
Изобретение будет описано ниже без ограничения общности с использованием примера гондольного подъемника в качестве варианта выполнения известной канатной дороги 1, как показано на Фиг. 1. Фиг. 1 иллюстрирует станцию 2 (показана пунктирными линиями) канатной дороги 1. На станции 2 расположен канатный шкив 3, через который отклоняется тяговый канат 4 канатной дороги 1. Канатный шкив 3 на одной из станций канатной дороги 1 известным образом приводится в движение приводом для перемещения тягового каната 4 по петле через канатный шкив другой станции. Также известно, что тяговый канат 4 натягивается натяжным устройством, действующим на канатный шкив 3. Для наглядности эти известные устройства, в частности, вторая станция с канатным шкивом, приводом, натяжным устройством и т.д., не показаны. Канатная дорога 1 может одновременно перемещать большое количество кабин 5n, n≥1, обычно в диапазоне от нескольких десятков или нескольких сотен кабин 5n, но для простоты иллюстрации показана только одна кабина.
Если канатная дорога 1 не оборудована кабинами 5n, которые постоянно закреплены на тяговом канате 4, кабина 5n, попадающая на станцию 2 канатной дороги 1, отсоединяется от тягового каната 4, как правило, с помощью разъемного зажима 16 (Фиг. 2) и перемещается через станцию 2 по направляющему рельсу 6, обычно со значительно меньшей скоростью, чем на маршруте между двумя станциями. Вдоль направляющего рельса 6 обеспечен конвейер, например, в виде множества ведомых колес 7 конвейера, по которым перемещается кабина 5n. Когда кабина 5n покидает станцию 2, кабина 5n ускоряется на выходе через конвейер и снова присоединяется к тяговому канату 4, например, с помощью зажима 16.
На станции 2 часто обеспечена платформа 8, на который люди могут заходить или выходить из кабин 5n.
Фиг. 2 иллюстрирует кабину 5n, здесь в виде кабинки, канатной дороги 1, которая отсоединяется от тягового каната 4. С помощью подвеса 18 кабина 5n соединена с ходовой тележкой 17, которая в простейшем случае состоит только из одного рабочего колеса. На подвесе 18 расположен зажим 16, который может зажимать тяговый канат 4 под действием зажимной пружины, и который может механически приводиться в действие с помощью соединительного ролика 14 и рычага 13 зажима. Когда соединительный ролик 14 катится по направляющим рампам на станции 2, рычаг 13 зажима приводится в действие, и зажим 16 открывается. Зажим 16 закрывается под действием зажимной пружины. На подвесе 18 также расположен направляющий ролик 15, который взаимодействует с направляющим рельсом 6 на станции 2. Также обеспечена фрикционная накладка 19, которая может взаимодействовать с конвейером, например, вращающимися колесами 7 конвейера, для перемещения отсоединенной кабины 5n по станции 2 вдоль направляющего рельса 6.
Канатная дорога 1 находится под управлением системы 10 управления канатной дорогой в виде подходящего аппаратного и программного обеспечения, как показано на Фиг. 3 и Фиг. 4. Система 10 управления канатной дорогой в общем распределена на множество блоков управления, например, программируемых логических контроллеров (PLC) и центральный компьютер, которые соединены друг с другом и вместе образуют систему управления канатной дорогой 1. Блоки управления могут быть закреплены за определенными частями или подузлами канатной дороги 1. Канатная дорога 1, как правило, также содержит диспетчерскую 11 (Фиг. 4), из которой с помощью системы 10 управления канатной дорогой могут контролироваться и регулироваться все функции канатной дороги 1. С этой целью, разумеется, в диспетчерской 11 и/или на станции 2 обеспечены соответствующие блоки 12 ввода и отображения, например, клавиши, кнопки, клавиатура, экраны, световые индикаторы и т.д.
Конструкция и работа канатной дороги 1 и ее компонентов хорошо известны, так что они рассматриваются в настоящем документе только в том объеме, который необходим для понимания изобретения.
Канатная дорога 1 также содержит множество i≥1 блоков 20i контроля функций, которые контролируют конкретную функцию канатной дороги 1, связанную с кабиной 5n. В настоящее время блоки 20i контроля функций передают неисправности в виде отклонения функции от ожидаемой нормальной функции в систему 10 управления канатной дорогой, которая инициирует определенные действия, связанные с неисправностью. Действие может представлять собой, например, отображение предупреждающего сообщения в блоках 12 ввода и отображения, выдачу сообщения об ошибке, которое автоматически приводит к аварийной остановке, остановку канатной дороги 1, изъятие кабины 5n или действие, которое должно быть выполнено обслуживающим персоналом (например, проверку блока контроля функции, деактивацию блока, изменение направления движения, повторную проверку, изъятие кабины, переключение на аварийный привод и т.д.). Во время работы канатной дороги 1 большое количество кабин 5n может обуславливать частые неисправности, что иногда затрудняет устранение неисправностей, поскольку неисправность или место неисправности не может быть надежно идентифицировано только на основе сообщения о неисправности. Задача настоящего изобретения заключается в улучшении этой ситуации.
В связи с этим в соответствии с изобретением каждой из n≥1 кабин 5n присваивают уникальный идентификатор FIDn кабины. Идентификатор FIDn кабины может считываться считывателем. Идентификатор FIDn кабины по существу может быть любого типа, как и реализация считывателя для считывания идентификатора FIDn кабины. Например, штрих–код, QR–код или т.п. могут считываться оптически, например, с помощью лазера, с получением и оценкой изображения, или с помощью инфракрасного излучения. Также возможно использование ультразвука или микроволн с подходящими идентификаторами FIDn кабин.
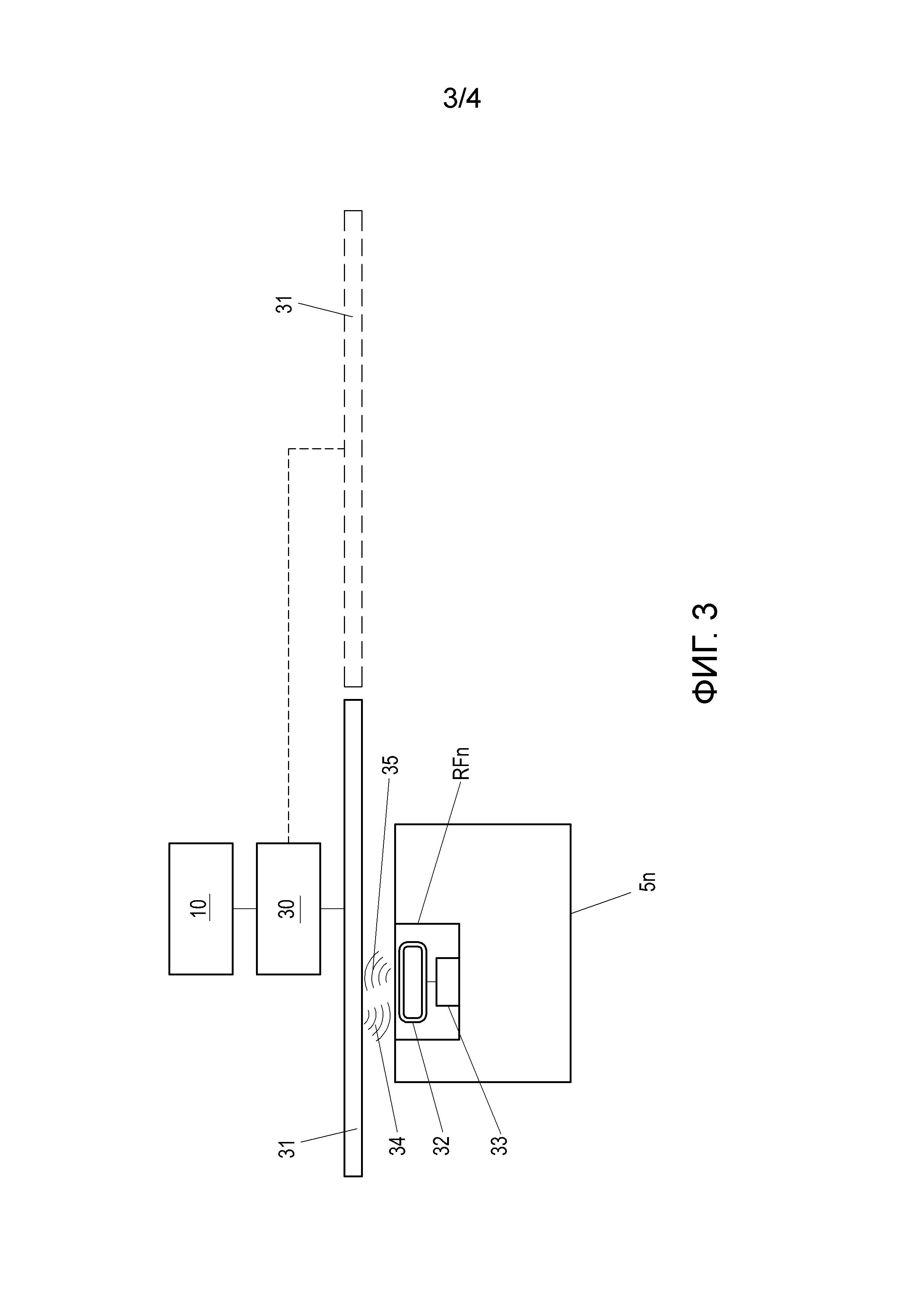
Однако использование радиоприемопередатчиков RFn, например, RFID–транспондеров (радиочастотная идентификация) (часто также называемых RFID–метками) для сохранения идентификатора FIDn кабины особенно предпочтительно, как объяснено со ссылкой на Фиг. 3. В частности, пассивные радиотранспондеры RFn, например, пассивные RFID–транспондеры, являются хорошим вариантом, так как для радиотранспондеров RFn на кабине 5n не требуется источник питания. Пассивный радиотранспондер активен только в эффективном диапазоне передающей антенны 31 считывателя 30, охватывающего электромагнитное поле, поскольку пассивный радиотранспондер RFn получает рабочее питание от электромагнитного сигнала, испускаемого передающей антенной 31, который принимается с помощью принимающей антенны 32 в радиотранспондере RFn. Уникальный идентификатор FIDn кабины может храниться в энергонезависимом блоке 33 хранения радиотранспондера RFn, который может считываться и передаваться в считыватель 30. В некоторых вариантах выполнения считыватель 30 также может записывать в блок 33 хранения, например, для сохранения уникального идентификатора FIDn кабины в блоке 33 хранения. Такой радиотранспондер RFn может иметь очень маленький размер и, следовательно, может использоваться очень гибко. В эффективном диапазоне передающей антенны 31, которая передает запросный сигнал 34, радиотранспондер RFn отвечает ответным сигналом 35, содержащим идентификатор FIDn кабины. Ответный сигнал 35 принимается передающей антенной 31 и перенаправляется в считыватель 30, который декодирует идентификатор FIDn кабины из ответного сигнала 35. Считыватель 30 соединен с системой 10 управления канатной дорогой и может передавать идентификатор FIDn кабины в систему 10 управления канатной дорогой. Считыватель 30 также может быть соединен с множеством передающих антенн 31, как показано на Фиг. 3.
В зависимости от скорости проходящей кабины 5n, обычно в диапазоне от 0,3 м/с до 7 м/с для канатной дороги 1, передающая антенна 31 может иметь разную длину (если смотреть в направлении движения кабины). Передающая антенна 31 предпочтительно также является гибкой для обеспечения возможности размещения передающей антенны 31 в разных местах канатной дороги 1 или станции 2.
Разумеется, передающая антенна 31 и радиотранспондер RFn должны быть расположены так, чтобы радиотранспондер RFn мог достигать эффективного диапазона передающей антенны 31. Радиотранспондер RFn, например, может быть расположен на подвесе 18 или на ходовой тележке 17 кабины 5n, а передающая антенна 31 может быть расположена на направляющем рельсе 16 на станции 2. Разумеется, существует множество других возможностей.
При нормальной работе система 10 управления канатной дорогой в любое время знает местоположение кабин 5n. Это легко определить на основе скорости тягового каната 4, которая всегда известна, длины тягового каната и, возможно, также скорости отсоединенных кабин 5n на станции. За счет использования уникальных идентификаторов FIDn кабин система 10 управления канатной дорогой знает не только, где находится кабина 5n, но также и какая кабина 5n там находится. С этой целью идентификатор FIDn каждой кабина 5n может считываться в по меньшей мере одном произвольном месте канатной дороги 1. Разумеется, также возможно считывание идентификатора FIDn кабины в нескольких местах.
Система 10 управления канатной дорогой, например, может обнаруживать идентификатор FIDn каждой кабины 5n при загрузке канатной дороги 1 кабинами 5n перед началом работы. С этой целью, например, идентификатор FIDn кабин 5m может считываться в области переключателей, соединяющих место хранения кабин и главную линию канатной дороги 1, во время загрузки, например, за счет размещения передающей антенны 31 в этой области. Затем считыватель 30, соединенный с передающей антенной 31, передает соответствующий идентификатор FIDn кабины в систему 10 управления канатной дорогой. Таким образом, система 10 управления канатной дорогой также знает порядок расположения кабин 5n на тяговом канате 4.
Это позволяет системе 10 управления канатной дорогой связывать сообщение FSi о состоянии функции, полученное от блока 20i контроля функции, или неисправности и/или параметры кабины, содержащиеся в нем, с конкретной кабиной 5n, которая инициировала сообщение FSi о состоянии функции. Затем система 10 управления канатной дорогой сохраняет принятое сообщение FSi о состоянии функции или неисправности и/или параметры кабины, содержащиеся в нем, с идентификатором FIDn кабины. Это позволяет анализировать сохраненные сообщения FSi о состоянии функции или неисправности и/или параметры кабины, содержащиеся в них, например, в отношении тенденции изменения или накопления, для получения выводов о причине отказа, что может значительно упростить устранение неисправностей, как объяснено подробно ниже.
В этом случае не менее предпочтительно, если в сообщении FSi о состоянии функции может передаваться не только неисправность, но также и параметр кабины, установленный блоком 20i контроля функции, поскольку это может помочь в устранении неисправностей. Разумеется, сообщение FSi о состоянии функции также может включать в себя как неисправность, так и параметр кабины.
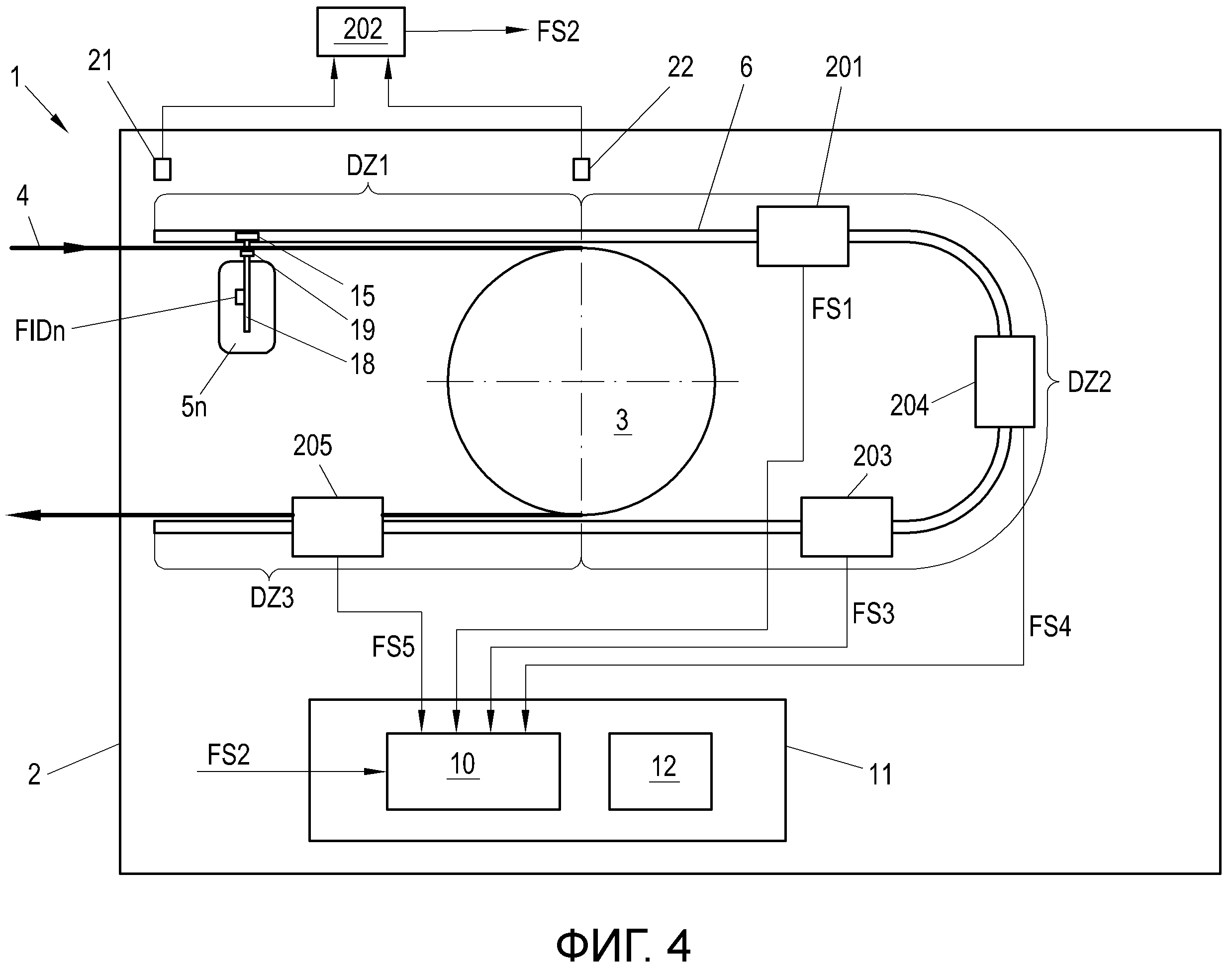
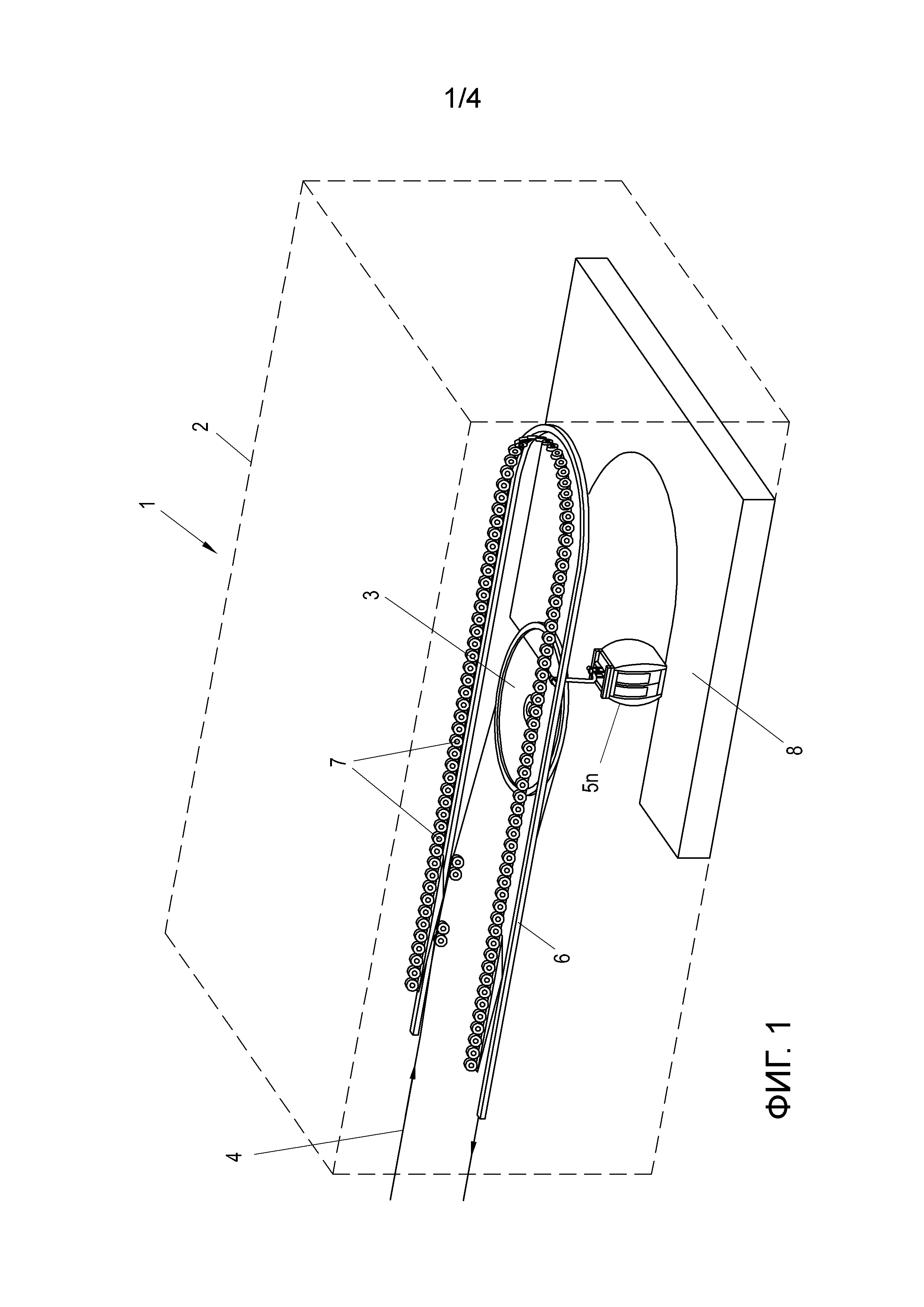
В зависимости от функции, которая контролируется, блок 20i контроля функции может быть расположен в разных местах канатной дороги 1. Типичные блоки 20i контроля функций будут описаны ниже со ссылкой на Фиг. 4 в качестве примера, а не ограничения.
Блок 201 контроля функции, например, может проверять усилие зажимной пружины зажима 16 кабины 5n на станции 2 каждый раз, когда кабины 5n проходят через станцию. С этой целью блок 201 контроля функции предпочтительно расположен в месте, где зажим 16 отсоединяется от тягового каната 4. Рычаг 13 зажима может приводиться в действие блоком 201 контроля функции против действия зажимной пружины, и, следовательно, может быть измерено приложенное усилие, которое является мерой усилия пружины. Измеренное усилие пружины передается в сообщении FS1 о состоянии функции блока 201 контроля функции в систему 10 управления канатной дорогой в качестве параметра кабины. При обнаружении неисправности, например, когда усилие пружины опускается ниже требуемого заданного предела, блок 201 контроля функции может передавать сообщение FS1 о состоянии функции о неисправности в систему 10 управления канатной дорогой, по возможности, вместе с параметром кабины. Затем в системе 10 управления канатной дорогой инициируется соответствующее действие. В случае неисправности канатная дорога 1 может быть остановлена, или обслуживающий персонал может инициировать изъятие кабины 5n, вызвавшей неисправность.
Идентификатор FIDn кабины также может считываться в области блока 201 контроля функции, хотя можно предположить, что система 10 управления канатной дорогой знает, какая кабина 5n в настоящее время находится в области блока 201 контроля функции. Если идентификатор FIDn кабины считывается снова, могут быть обнаружены возможные неисправности в системе 10 управления канатной дорогой. Например, положение кабины 5n на тяговом канате 4 может быть изменено из–за ошибки управления, или в худшем случае кабина 5n также может быть потеряна.
Сообщения FS1 о состоянии функции или параметры кабины, содержащиеся в нем, сохраняются в системе 10 управления канатной дорогой вместе с идентификатором FIDn кабины, например, в подходящей базе данных. Это позволяет обнаружить тенденцию ухудшения усилия пружины.
С этой целью наборы данных, которые принадлежат сообщению FSi о состоянии функции блока 20i контроля функции, могут быть отфильтрованы для конкретной кабины 5n в системе 10 управления канатной дорогой, например, с помощью подходящих программных инструментов, используемых в целях оценки, что легко возможно с помощью сохраненного идентификатора кабины, и изменения сохраненных параметров кабины с течением времени могут быть оценены. Измеренное усилие пружины, например, может быть выведено или отображено или оценено иным образом. На основе оценки тенденции изменения также можно определить разрыв зажимной пружины (обычно имеется несколько зажимных пружин), поскольку он приводит к скачку усилия пружины.
Сохраненные неисправности также могут быть проанализированы с помощью подходящих программных инструментов. Например, может быть оценена частота неисправностей конкретного блока 20i контроля функции, инициируемых одной и той же кабиной 5n. Когда одна и та же кабина 5n всегда инициирует неисправность, это может быть четким признаком неисправности кабины 5n. Также в системе 10 управления канатной дорогой может оцениваться частота неисправностей конкретного блока 20i контроля функции, инициируемых разными кабинами 5n. Если определенная неисправность инициируется разными кабинами 5n, это может быть признаком повреждения в области блока 20i контроля функции или в компоненте канатной дороги, контролируемом блоком 20i контроля функции.
В частности, но не только, в случае отсоединяемых кабин 5n прохождение станции логически часто делится на так называемые зоны DZm, m≥1 прохождения, например, зону DZ1 прохождения, в которой кабина 5n отсоединяется от тягового каната 4 и замедляется, зону DZ2 прохождения, в которой люди заходят или выходят, и зону DZ3 прохождения, в которой кабина 5n ускоряется и присоединяется к тяговому канату 4. Разумеется, также возможно большее или меньшее количество зон DZm прохождения. По существу, в зоне DZm прохождения всегда находится только одна кабина 5n, что может быть легко обеспечено путем соответствующего разделения зон DZm прохождения. Описание приведено с использованием примера зоны DZ1 прохождения, но в общем применимо к любой зоне DZm прохождения.
Здесь блок 202 контроля функции выполнен в качестве защиты прохождения для зоны DZ1 прохождения. Это необходимо для того, чтобы кабина 5n перемещалась через зону DZ1 прохождения в течение заданного временного окна. Вместо этого времени, разумеется, также может быть использовано расстояние, пройденное по канату, поскольку время и расстояние, пройденное по канату, эквивалентны. Следовательно, в целях безопасности прохождения также можно определить, является ли расстояние, пройденной по канату кабиной 5n, слишком большим или слишком маленьким. С этой целью также может быть непосредственно измерено расстояние, пройденное по канату, на станции 2. Измерение расстояния имеет преимущество в том, что оно не зависит от скорости каната (и, следовательно, времени). Если кабина 5n движется слишком медленно или слишком быстро, определенный допустимый диапазон расстояния по канату нарушается, и необходимо предположить неисправность. Такая неисправность передается в систему 10 управления канатной дорогой в сообщении FS2 о состоянии функции. В этом случае система 10 управления канатной дорогой останавливает канатную дорогу 1. Кроме того, время прохождения или расстояние по канату для каждой кабины 5n, проходящей через зону DZ1 прохождения, может передаваться в систему 10 управления канатной дорогой в сообщении FS2 о состоянии функции в качестве параметра кабины. Каждое сообщение FS2 о состоянии функции сохраняется в системе 10 управления канатной дорогой вместе с присвоенным идентификатором FIDn кабины.
Это также позволяет оценить сохраненные сообщения FS2 о состоянии функции или неисправности и параметры кабины, переданные в них. С этой целью тенденция изменения времени прохождения для конкретной кабины 5n может также проверяться и оцениваться с помощью подходящих программных инструментов. Если существует тенденция, что кабина 5n движется все быстрее и быстрее через зону DZ1 прохождения, это может быть связано с износом или обледенением фрикционной накладки 19. Если кабина 5n движется все медленнее и медленнее через зону DZ1 прохождения, это может быть признаком механического повреждения. С другой стороны, если определено, что разные кабины 5n сообщают о неисправности в одной и той же зоне DZ1 прохождения, это может быть признаком проблемы с конвейерами, например, колесами 7 конвейера, например, слишком низкое давление в шинах, в зоне DZ1 прохождения, или проблемы с приводом конвейеров в зоне DZ1 прохождения, например, слишком низкое натяжение клиновидного ремня. За счет оценки сохраненных сообщений FS2 о состоянии функции можно значительно ускорить и упростить устранение неисправностей.
Время прохождения через зону DZ1 прохождения может быть обнаружено, например, путем обнаружения въезда кабины 5n в зону DZ1 прохождения с помощью первого датчика 21 в начале зоны DZ1 прохождения и измерения времени в блоке 202 контроля функции до выезда кабины 5n из зоны DZ1 прохождения, которое может быть определено с помощью второго датчика 22 в конце зоны DZ1 прохождения. Время также может быть обнаружено счетчиком, который срабатывает, когда кабина 5n въезжает в зону DZ1 прохождения, и останавливается, когда кабина 5n покидает зону DZ1 прохождения. Расстояние, пройденное по канату, в зоне DZ1 прохождения может быть обнаружено по существу таким же образом.
Первый датчик 21 и/или второй датчик 22 также могут быть реализованы путем считывания идентификатора FIDn кабины, например, в виде считывателя 30 для радиотранспондера. Считывание идентификатора FIDn кабины может использоваться в качестве времени въезда или выезда кабины из зоны DZ1 прохождения.
При использовании радиотранспондера RFn для сохранения идентификатора FIDn кабины передающая антенна 31 (или несколько передающих антенн 31) может покрывать всю длину зоны DZ1 прохождения в направлении движения кабины 5n. За счет известной нормальной скорости кабины 5n в зоне DZm прохождения и характеристик установленного радиотранспондера RFn известно, сколько раз радиотранспондер RFn на кабине 5n может считываться в зоне DZ1 прохождения. Например, в типичной реализации с длиной передающей антенны 31 7 м и скоростью кабины 7 м/с возможно 6–8 считываний. Если в зоне DZ1 прохождения осуществляется менее 6 или более 8 считываний, можно предположить, что кабина 5n прошла через зоны DZ1 прохождения либо слишком медленно, либо слишком быстро. Даже это может использоваться в качестве достаточно точного счетчика для движения через зону прохождения.
Однако зона DZm прохождения не обязательно должна находиться на станции 2. Зона DZm прохождения с блоком 20i контроля функции также может быть обеспечена на маршруте между двумя станциями. Узел шкива на опоре подъемника канатной дороги 1, например, может быть определен в качестве зоны DZm прохождения для гарантии, что никакие кабины 5n не застрянут вдоль узла шкива.
Другим примером блока 203 контроля функции является контроль блокировки двери или удерживающей перекладины кабины 5n. Для защиты пассажиров кабины 5n не только закрываются после посадки (например, с помощью двери на гондольном подъемнике или с помощью удерживающей перекладины на кресельном подъемнике), но дверь и удерживающая перекладина также механически блокируются для предотвращения непреднамеренного или ненадлежащего открытия кабины 5n на маршруте. Блок 203 контроля функции предназначен для предотвращения выезда кабины 5n или запуска кабины 5n в случае неисправного механизма блокировки. С этой целью на станции 2 в области, в которой закрывается и блокируется дверь или удерживающая перекладина, расположен известный блок контроля блокировки, который обнаруживает состояние блокировки и передает указанное состояние в блок 203 контроля функции. В случае ненадлежащей блокировки блок 203 контроля функции передает сообщение FS3 о состоянии функции о неисправности в систему 10 управления канатной дорогой. Затем система 10 управления канатной дорогой останавливает канатную дорогу 1 или инициирует другое необходимое действие. Состояние блокировки также может быть передано в блок 203 контроля функции вместе с идентификатором FIDn кабины, хранящимся в кабине 5n, который затем может передавать идентификатор FIDn кабины в систему 10 управления канатной дорогой. Сообщение FS3 о состоянии функции также сохраняется вместе с идентификатором FIDn инициировавшей кабины 5n в системе 10 управления канатной дорогой. За счет оценки сохраненных сообщений FS3 о состоянии функции или неисправностей, переданных в них, с помощью подходящих программных инструментов можно определить, возникают ли такие неисправности чаще в конкретной кабине 5n, что может быть признаком дефекта блокировки в кабине 5n.
Другим примером блока 204 контроля функции является контроль подогрева сиденья в кабине 5n, здесь, например, кресла. Во время прохождения кабины 5n через станцию 2 происходит фаза подогрева сиденья, заключающаяся в том, что на станции 2 по шине подается питание для подогрева сиденья кабины 5n. В этом случае блок 204 контроля функции может обнаруживать энергопотребление кабины 5n во время фазы подогрева. Обнаруженное энергопотребление может передаваться в систему 10 управления канатной дорогой в сообщении FS4 о состоянии функции в качестве параметра кабины. Если блок 204 контроля функции определяет, что энергопотребление является слишком низким или слишком высоким по сравнению с заданными пределами, в систему 10 управления канатной дорогой также может быть передано сообщение FS4 о состоянии функции, сообщающее о неисправности. Сообщение FS4 о состоянии функции с идентификатором FIDn инициировавшей кабины 5n также сохраняется в системе 10 управления канатной дорогой. За счет оценки сохраненных сообщений FS4 о состоянии функции с помощью подходящих программных инструментов можно определить, существует ли повышенная частота таких неисправностей в конкретной кабине 5n, что может быть признаком неисправности обогревателя сиденья кабины 5n. Подобным образом для определения ухудшения также может оцениваться тенденция изменения энергопотребления кабины 5n с течением времени. Если разные кабины 5n сообщают о неисправности, или если разные кабины 5n имеют аналогичную тенденцию ухудшения, это также может быть признаком повреждения на станции 2.
Дополнительным примером блока 205 контроля функции является так называемый барьер 23 (Фиг. 2), который расположен в области конкретного компонента кабины 5n и имеет такую форму, что компонент в его нормальной ожидаемой ориентации, местоположении и расположении проходит мимо барьера, не касаясь барьера. Однако в случае неожиданной ориентации, местоположения или расположения компонента компонент входит в контакт с барьером, который инициируется движением кабины 5n, например, поворачивает или смещает барьер 23, что может обнаруживаться датчиком 24 и передаваться, например, в блок 205 контроля функции. Инициирование барьера 23 обычно представляет собой неисправность, которая передается блоком 205 контроля функции в систему 10 управления канатной дорогой в сообщении FS5 о состоянии функции. Там сообщение FS5 о состоянии функции снова закрепляется за инициировавшей кабиной 5n, и сообщение FS5 о состоянии функции сохраняется вместе с идентификатором FIDn кабины в системе 10 управления канатной дорогой. За счет оценки сохраненных сообщений FS5 о состоянии функции с помощью подходящих программных инструментов можно определить, существует ли повышенная частота таких неисправностей в конкретной кабине 5n, что может быть признаком неисправности кабины 5n, например, обледенения или повреждения компонента.
Блок 20i контроля функции может быть выполнен в виде подходящего аппаратного обеспечения, например, компьютера или PLC, и/или в виде программного обеспечения.
Хотя это не является абсолютно необходимым, идентификатор FIDn кабины 5n может считываться в каждом блоке 20i контроля функции в области блока 20i контроля функции и подобным образом передаваться в систему 10 управления канатной дорогой.
Способ сохранения сообщений FSi о состоянии функции или неисправностей или параметров кабины в системе 10 управления канатной дорогой является произвольным. Разумеется, целесообразно использовать базу данных, в которой запись данных для каждого сообщения FSi о состоянии функции сохраняется с идентификатором FIDn кабины и неисправностью (по возможности в виде уникального кода) и/или с параметром кабины (предпочтительно в виде измеренного значения). Запись данных также может быть обеспечена меткой времени, которая указывает приход сообщений FSi о состоянии функции.
Устройство на подвесной канатной дороге или на грузовой подъемно-транспортной установке для определения ошибочного положения несущего каната на держателе с желобком, в котором расположен несущий канат, и с определителем ошибочного положения несущего каната
Подвижной состав кресельного канатного подъемника или устройства канатной подвесной дороги
Подвесная канатная дорога (варианты)
Устройство для перевозок по канатной дороге, оборудованное средствами амортизации
Установка для генерирования электрической энергии с помощью фотогальванических элементов
Подвесная канатная дорога с вспомогательным устройством для посадки/высадки
Кресло для кресельного подъемника
Кресло для кресельного подъемника
Канатная подвесная дорога и способ ее эксплуатации
Подвесная канатная дорога
Канатная дорога, имеющая контроль блокировки средства передвижения
Канатная дорога и способ эксплуатации канатной дороги
Способ регистрации износа канатного ролика установки канатной дороги

