Результат интеллектуальной деятельности: ШАРНИРНЫЙ ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР
Вид РИД
Изобретение
Изобретение относится к подъемно-транспортным машинам для перемещения подвешенных грузов в вертикальной плоскости и может быть использовано в автоматических линиях и роботах-манипуляторах при сборочных, ремонтных и фасовочных операциях в промышленности, машиностроении, портовом и гаражном хозяйстве.
Известно грузоподъемное устройство в виде грузоподъемной лебедки с наматываемым на тяговой барабан стальным канатом для вертикального перемещения подвешенного груза [1, стр. 327, схема лебедки на рисунке б)] - аналог.
Недостатками этого устройства являются:
1. Сложная конструкция и низкий КПД из-за применения сложного планетарного зубчатого редуктора и специального кабелеукладчика для равномерной многослойной укладки стального каната на тяговый вращающийся барабан.
2. Большие габариты тягового барабана с наматываемым на него стальным канатом (по правилам техники безопасности [2, стр. 222, табл. 115] диаметр тягового барабана должен быть не менее 1 метра для исключения перегиба и разрыва стального каната).
3. Из-за постоянного увеличения диаметра барабана при намотке на него стального каната происходит радиальное смещение поднимаемого груза относительно основания грузоподъемной лебедки, что приводит к раскачиванию поднимаемого груза и может вызвать обрыв каната и аварийное падение груза.
Наиболее близким к предлагаемому изобретению является применяемый в грузоподъемных машинах и роботах шарнирный грузоподъемный манипулятор, содержащий, установленное на опорной стойке, шарнирно-сочлененное устройство для перемещения подвешенного груза соединенного с шарнирным подвесом крюка, которое выполнено в виде кинематически связанных между собой двух кривошипных механизмов и одного поворотного двухкоромыслового рычажного механизма многошарнирного привода поворотной стрелы крана, в котором шарнирный подвес крюка с подвешенным грузом соединен с удлиненным шатуном, совершающим криволинейное перемещение вместе с подвешенным грузом при повороте ведущего коромысла [3, стр. 38, схема на рис. 3]. - прототип.
Недостатками известного шарнирного грузоподъемного манипулятора являются:
1. Криволинейное перемещение переносимого груза при его подъеме и опускании приводит к сильному раскачиванию переносимого груза с амплитудой до 0,7 метра [3, стр. 38, кривая на рис. 3], что снижает точность стыковки собираемых изделий и может привести к обрыву подвеса и аварийному падению с высоты тяжелого груза.
2. Колебательное перемещение подвешенного груза приводит к повышенным динамическим нагрузкам на приводной электродвигатель и узлы манипулятора, что требует более мощного двигателя и увеличения энергозатрат.
3. Большой опрокидывающий момент от груза на стреле крана относительно опорной стойки стрелы требует применения сложного уравновешивающего устройства.
Технической задачей является обеспечение подъема и опускания переносимого груза точно по заданной вертикали C1C2 для исключения вредного раскачивания этого груза, приводящего к перегрузке приводного электродвигателя и увеличению энергозатрат, а также снижение опрокидывающего момента от подвешенного груза относительно опорной стойки.
Решение поставленной задачи достигается за счет выполнения шарнирно-сочлененного устройства шарнирного грузоподъемного манипулятора в виде трех кривошипно-коромысловых механизмов с коромыслами одинаковой длины, соединенных между собой посредством рычажного механизма в виде равностороннего ромба, в котором 3 вершины ромба образуют 2 двойных и 1 тройной многократные шарниры с каждым их трех кривошипно-коромысловых механизмов, а четвертая вершина ромба выполнена в виде однократного шарнира и соединена с шарнирным подвесом крюка с подвешенным грузом, из указанных трех кривошипно-коромысловых механизмов два механизма выполнены с коромыслами одинаковой длины, шарнирно соединенными между собой через двойной многократный шарнир в общей точке с опорной стойкой, и содержит общий кривошип, длина которого равна длине опорной стойки, а третий кривошипно-коромысловый механизм выполнен с ведущим кривошипом, который кинематически связан через шатун с рычажным механизмом в виде равностороннего ромба совместно с коромыслом одного из двух других кривошипно-коромысловых механизмов и установлен на дополнительной шарнирной опоре, расположенной между опорной стойкой и линией вертикального перемещения подвешенного груза.
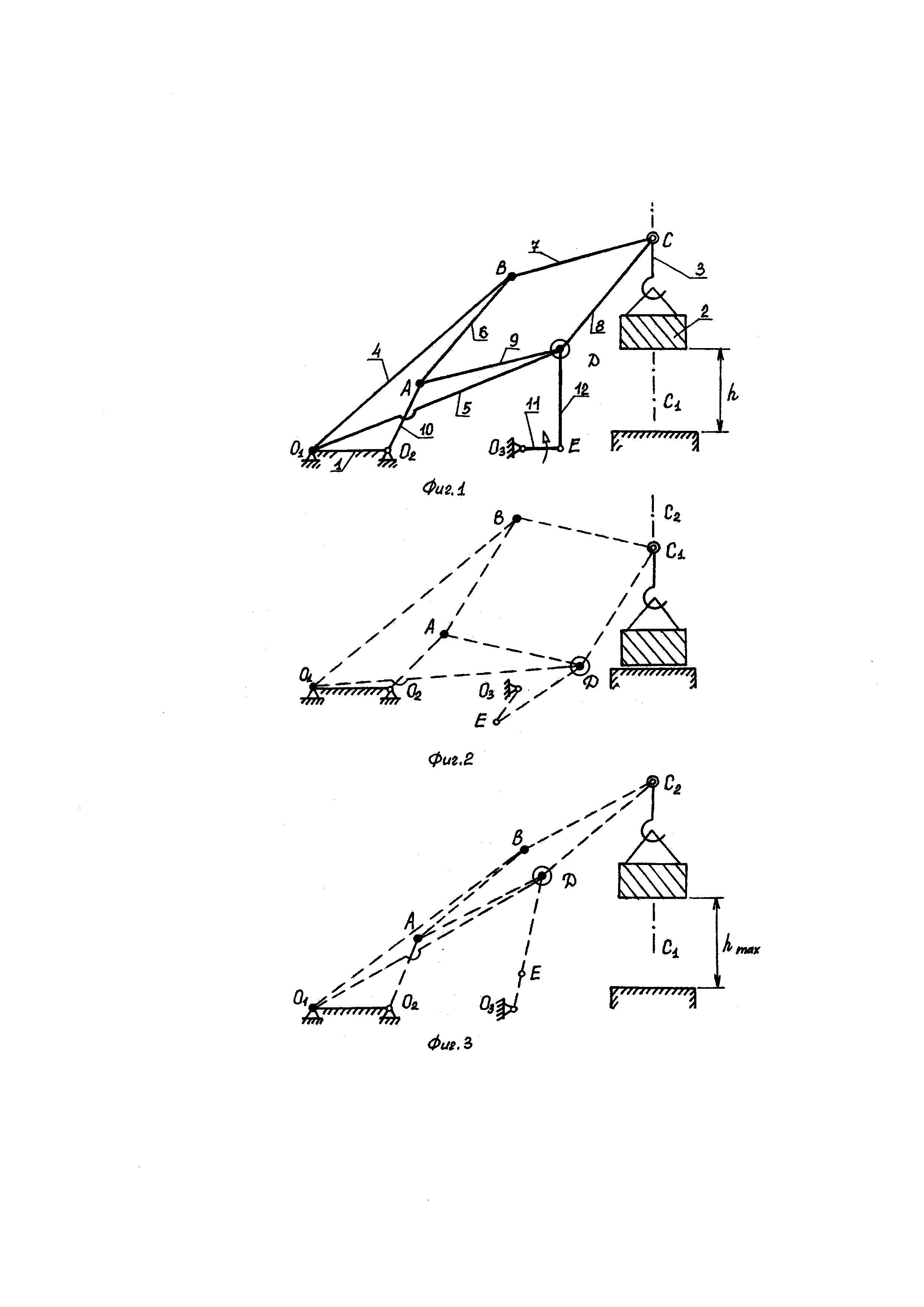
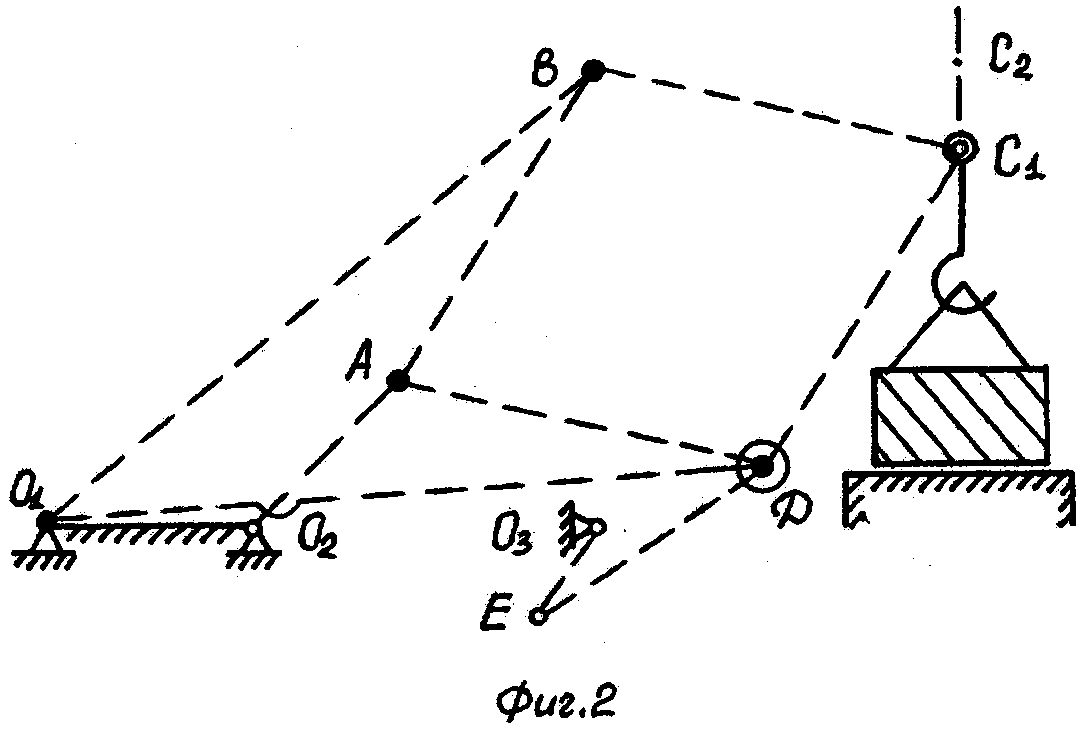
Сущность изобретения поясняется чертежами, где на фиг. 1 показан шарнирный грузоподъемный манипулятор для перемещения подвешенного груза в вертикальной плоскости; на фиг. 2 показано крайнее нижнее положение С1 подвеса с грузом на вертикали С1С2 при вращении ведущего кривошипа О3Е шарнирного грузоподъемного манипулятора; на фиг. 3 показано крайнее верхнее положение С2 подвеса с грузом на вертикали C1C2 при вращении ведущего кривошипа О3Е шарнирного грузоподъемного манипулятора.
Данный шарнирный грузоподъемный манипулятор содержит опорную стойку 1 и шарнирно-сочлененное устройство для перемещения подвешенного груза 2, соединенного с шарнирным подвесом крюка 3. Шарнирно-сочлененное устройство для перемещения подвешенного груза 2 выполнено в виде трех кривошипно-коромысловых механизмов (O2ABO1, O2ADO1 и O3EDO1) с коромыслами 4 и 5 одинаковой длины (O1B=O1D), соединенных между собой посредством рычажного механизма в виде равностороннего ромба ABCD со сторонами 6, 7, 8 и 9 (AB=BC=CD=DA), в котором три вершины ромба (A, B, D) образуют многократные шарниры два двойных шарнира А, В и один тройной шарнир D с каждым из трех кривошипно-коромысловых механизмов, а четвертая вершина С ромба выполнена в виде однократного шарнира и соединена с шарнирным подвесом крюка 3 с подвешенным грузом 2.
Из указанных трех кривошипно-коромысловых механизмов два механизма (O2ABO1, O2ADO1) выполнены коромыслами с 4 и 5 одинаковой длины (O1B=O1D), шарнирно соединены между собой через многократный шарнир О1 в общей точке с опорной стойкой 1 (O1O2), и содержат общий кривошип 10, длина которого O2A равна длине опорной стойке (О2А=O1O2), а третий кривошипно-коромысловый механизм O3EDO1 выполнен с ведущим кривошипом 11, который кинематически связан в точке D через шатун 12 с коромыслом 5 (O1D), а также связан с механизмом в виде ромба ABCD и установлен на дополнительной шарнирной опоре О3, расположенной между опорной стойкой O1O2 и линией С1С2 вертикального перемещения груза 2. Опорная стойка 1 (O1O2) является общей для кривошипно-коромысловых механизмов О2АВО1 и O2ADO1. Коромысло 5 (O1D) является общим для кривошипно-коромысловых механизмов O2ADO1 и O3EDO1. Установленный на промежуточной опоре О3 ведущий кривошип 11 кинематически связан с приводным двигателем (на фиг. 1 не показан) через самотормозящуюся передачу, например, в виде самотормозящегося червячного редуктора, обеспечивающего фиксированное удержание подвешенного груза 2 на заданной высоте при включенном приводном двигателе.
Работа шарнирного грузоподъемного манипулятора заключается в следующем. При вращении ведущего кривошипа О3Е за счет попеременного уменьшения или увеличения длины диагоналей BD и АС механизма равностороннего ромба ABCD происходит перемещение точно по вертикали С1С2 (показано на фиг. 1, фиг. 2, фиг. 3) установленного на шарнире С ромба шарнирного подвеса 3 с поднимаемым или опускаемым грузом 2 в пределах его хода hmax=С1С2.
Достигаемый в данном шарнирном грузоподъемном манипуляторе технический результат будет следующий:
1. При угловом поворотном вращении кривошипа 11 обеспечивается подъем или опускание подвешенного груза 2 точно по вертикали С1С2 с ее постоянным расположением относительно опоры О3 ведущего кривошипа 11, что исключает раскачивание груза 2, а установка кривошипа 11 на дополнительной шарнирной опоре О3 между опорной стойкой O1O2 и линией С1С2 снижает опрокидывающий момент в манипуляторе.
2. Подъем и опускание подвешенного груза 2 без его раскачивания снижает динамические нагрузки на узлы манипулятора и приводной электродвигатель (что позволяет снизить его мощность на перемещение груза), а также повышает точность стыковки собираемых роботом изделий и узлов.
Источники информации:
1. Крайнев А.Ф. Механика машин (Фундаментальный словарь) - М.: Машиностроение, 2002, с. 327, схема лебедки на рисунке б) - аналог.
2. Долин П.А. Справочник по технике безопасности (Раздел 4 «Грузоподъемные машины для перемещения грузов») - М.: Энергоиздат, 1982, стр. 222, таблица 115.
3. Енчев К.Ц., Стойков С.Б. «Совмещение экстремального и оптимизационного синтеза при проектировании направляющего механизма портального крана // Теория механизмов и машин, №2 (12), 2008, Том 6. - Изд-во СПбГПУ - С. 38, рис. 3 (http:tmm.spbstu.ru) - прототип.
Грузоподъемный манипулятор
Грузоподъемный манипулятор

