Результат интеллектуальной деятельности: СПОСОБ СБОРКИ МНОГОСАТЕЛЛИТНОЙ УРАВНОВЕШЕННОЙ ПЛАНЕТАРНОЙ ПЕРЕДАЧИ
Вид РИД
Изобретение
Изобретение относится к машиностроению, а конкретно к планетарным передачам.
Известна односателлитная планетарная передача - так называемый «планетарный механизм Джемса», содержащая в своем составе неподвижное колесо, центральное ведущее колесо, сателлит и водило (Артоболевский И.И. Теория механизмов и машин изд. четвертое «Наука», Москва, 1988 г., стр. 162, рис. 7.23).
Недостатком такой передачи является ее неуравновешенность относительно центральной оси. Сателлит, обладающий массой, вращается относительно общей оси механизма и создает неуравновешенную инерционную силу.
Известна также трехсателлитная передача, в которой сателлиты устанавливаются на одно выходное звено-водило и их силы инерции уравновешиваются относительно общей оси вращения (Артоболевский И.И. Теория механизмов и машин изд. четвертое «Наука», Москва, 1988 г., стр. 498, рис. 22.36).
Недостатком такой передачи является то обстоятельство, что она может передавать движение от ведущего звена на водило, лишь, через один сателлит, что доказано в работе Дворников Л.Т. «Принципиальные проблемы многосателлитных планетарных зубчатых передач и возможные пути их разрешения» / Л.Т. Дворников, С.П. Герасимов // Фундаментальные исследования. - 2017. - №12. - С. 44-51.
При таком способе сборки планетарной передачи сателлиты не имеют между собой непосредственной кинематической связи.
Наиболее близким к предлагаемому является способ сборки самоустанавливающегося трехсателлитного планетарного редуктора, при котором помимо сателлитов и центральных колес в передачу вводятся дополнительные шатуны, причем так, что два первых сателлита соединяются между собой трехпарным шатуном, к третьей паре которого присоединяется второй шарнирный трехпарный шатун, который соединяет всю конструкцию с третьим сателлитом и двухпарным выходным звеном (RU №2541049 МПК F16H 1/48 опубл. 10.02.2015 г.).
Недостаток такого способа сборки заключается в том, что центры масс дополнительных трехпарных шарнирных шатунов имеют случайные расположения и их инерционные силы никак не уравновешиваются.
Техническая проблема, решаемая предлагаемым изобретением, заключается в уравновешивании масс трехпарных шарнирных шатунов.
Существующая техническая проблема решается тем, что многосателлитный уравновешенный планетарный редуктор собирают путем соединения центрального ведущего колеса, неподвижного колеса с внутренним зацеплением, выходного звена-водила и сателлитов, соединенных посредством трехпарных шатунов, согласно изобретению, первый и последующие сателлиты соединяют между собой кинематической цепью, образованной последовательным соединением трехпарных шатунов, в количестве на один меньше, чем сателлитов, и имеющих соосные второй и третий шарниры, соединенные соответственно вторым шарниром со следующим сателлитом, а третьим шарниром - с первым шарниром следующего шатуна, при этом первый сателлит соединяют с первым шарниром трехпарного шатуна, а последний из трехпарных шатунов третьим шарниром соединяют с выходным звеном-водилом.
Технический результат, получаемый при осуществлении предлагаемого изобретения, заключается в том, что в передаче достигается равномерное распределение нагрузки по сателлитам, что обеспечивается соосностью двух из трех шарниров трехпарных шатунов и расположением их центров масс на геометрических осях соединяемых ими сателлитов.
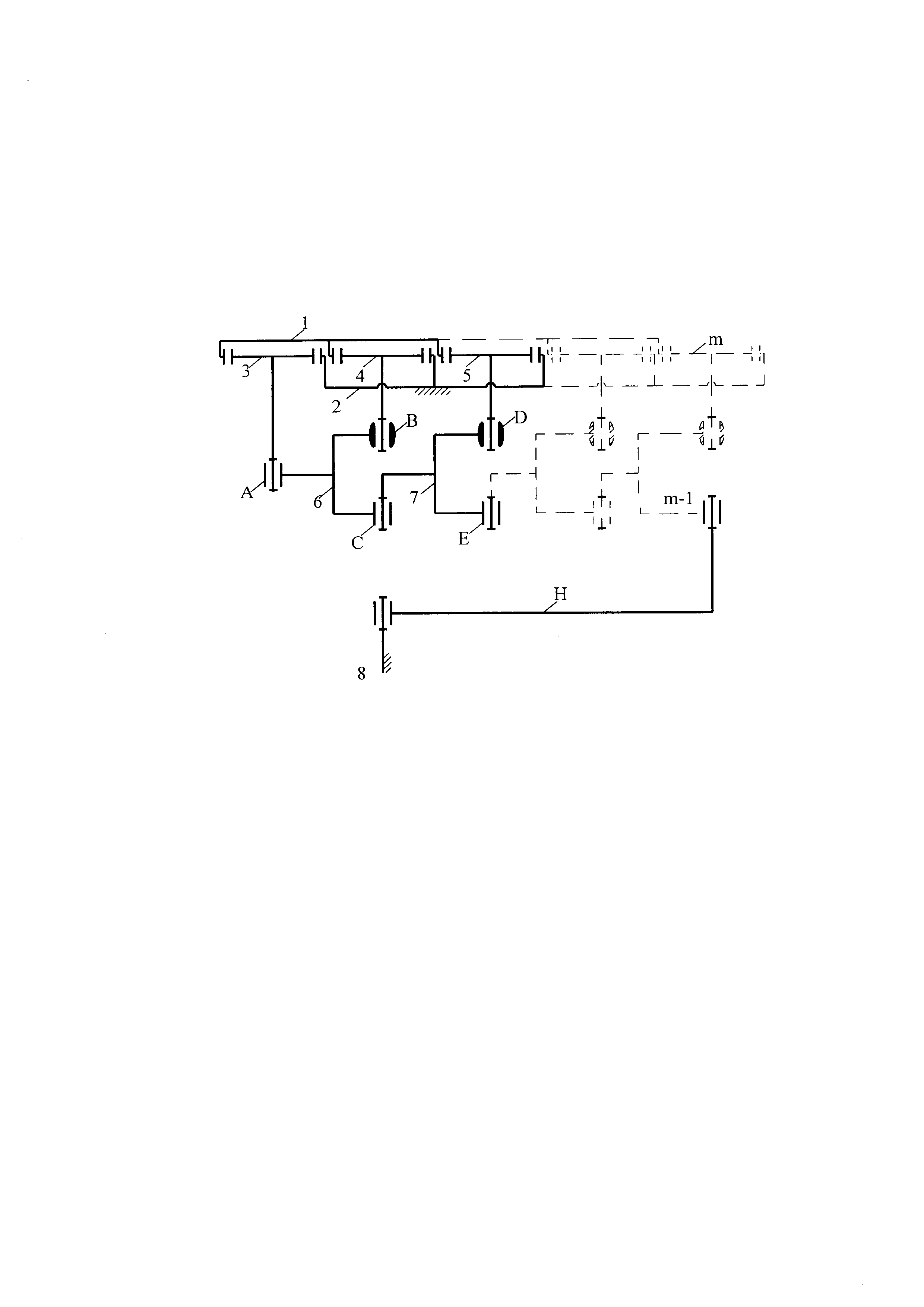
Предлагаемый способ проиллюстрирован чертежом, где изображена схема сборки уравновешенной многосателлитной планетарной передачи.
Многосателлитная планетарная передача, содержит центральное ведущее зубчатое колесо 1, неподвижное зубчатое колесо 2, сателлиты 3,4,5 до т, трехпарные шарнирные шатуны 6, 7 до (т-1), выходное звено водило Н и неподвижную стойку 8, относительно которой осуществляется движение.
Особенность предлагаемого способа заключается в том, что при его использовании: первый сателлит передачи - 3 связывается через шарнир А трехпарного шарнирного шатуна 6 и через шарнир В со вторым сателлитом -4, а через шарнир С, соосный с шарниром В, со вторым трехпарным шарнирным шатуном 7, который, в свою очередь, через шарнир D соединяется с третьим сателлитом 5, а через соосный с шарниром D шарнир Е со следующим трехпарным шатуном. Аналогично описанному, в кинематическую цепь вводятся все последующие сателлиты и трехпарные шатуны, при этом количество трехпарных шатунов меньше чем сателлитов на одно звено. Последний из трехпарных шарнирных шатунов своим третьим шарниром соединяется с выходным звеном - водилом Н.
Известно, что подвижность плоских механизмов с парами р5 и р4 определяется структурной формулой Чебышева П.Л.

где n - число подвижных звеньев, р5 и р4 - числа кинематических пар пятого (шарниров) и четвертого (пар зацепления) классов (Артоболевский И.И. Теория механизмов и машин изд. четвертое «Наука», Москва, 1988 г., стр. 38, формула 2,5).
В приведенной на фигуре 1 планетарной передаче общее число звеньев п. При этом сателлитов - m трехпарных шарнирных шатунов (m-1) и водило, т.е. n=2m. Между собой сателлиты связываются шарнирами через трехпарные шарнирные шатуны. Таких рычагов в цепи используется (m-1) штук и каждый из них добавляет в цепь по два шарнира, 2(m-1) и плюс два шарнира первого сателлита и водила, т.е. всех шарниров в цепи будет р5=2(m-1)+2. Кроме того зацепление т колес сателлитов добавляется в цепь р4=2m - по две кинематические пары каждого из сателлитов.
Если подставить в формулу (1) приведенные значения,

то W=0,
т.е. вся рассматриваемая система есть система нулевой подвижности или группа звеньев нулевой подвижности, группа Ассура.
Общее движение в этой системе задается от ведущего центрального колеса 1, подвижность которого равняется единице (W=1). Таким образом, так как к ведущему звену добавляется группа нулевой подвижности, то вся система обладает определенностью движения.
Благодаря тому, что центры масс трехпарных шарнирных шатунов располагаются на осях соединяемых ими сателлитов, система становится уравновешенной.
Работает предлагаемая многосателлитная уравновешенная планетарная передача следующим образом: при задании движения центральному колесу 1, движение от него передается на все установленные сателлиты равномерно через трехпарные шарнирные шатуны 6, 7, m-1, соединенные с выходным звеном Н. Таким образом, крутящий момент от центрального колеса 1 равномерно передается на все сателлиты через систему звеньев нулевой подвижности, состоящую из сателлитов и трехпарных шатунов, расположенных соосно передаче.
Эта многосателлитная система звеньев создана так, что центры масс трехпарных шатунов с целью их уравновешивания относительно общего центра вращения расположены на осях соединяемых ими сателлитов.
Способ сборки многосателлитной уравновешенной планетарной передачи путем соединения центрального ведущего колеса, неподвижного колеса с внутренним зацеплением, выходного звена-водила и сателлитов, соединенных посредством трехпарных шатунов, отличающийся тем, что первый и последующие сателлиты соединяют между собой кинематической цепью, образованной последовательным соединением трехпарных шатунов, в количестве на один меньше, чем сателлитов, и имеющих соосные второй и третий шарниры, соединенные соответственно вторым шарниром со следующим сателлитом, а третьим шарниром - с первым шарниром следующего шатуна, при этом первый сателлит соединяют с первым шарниром трехпарного шатуна, а последний из трехпарных шатунов третьим шарниром соединяют с выходным звеном-водилом.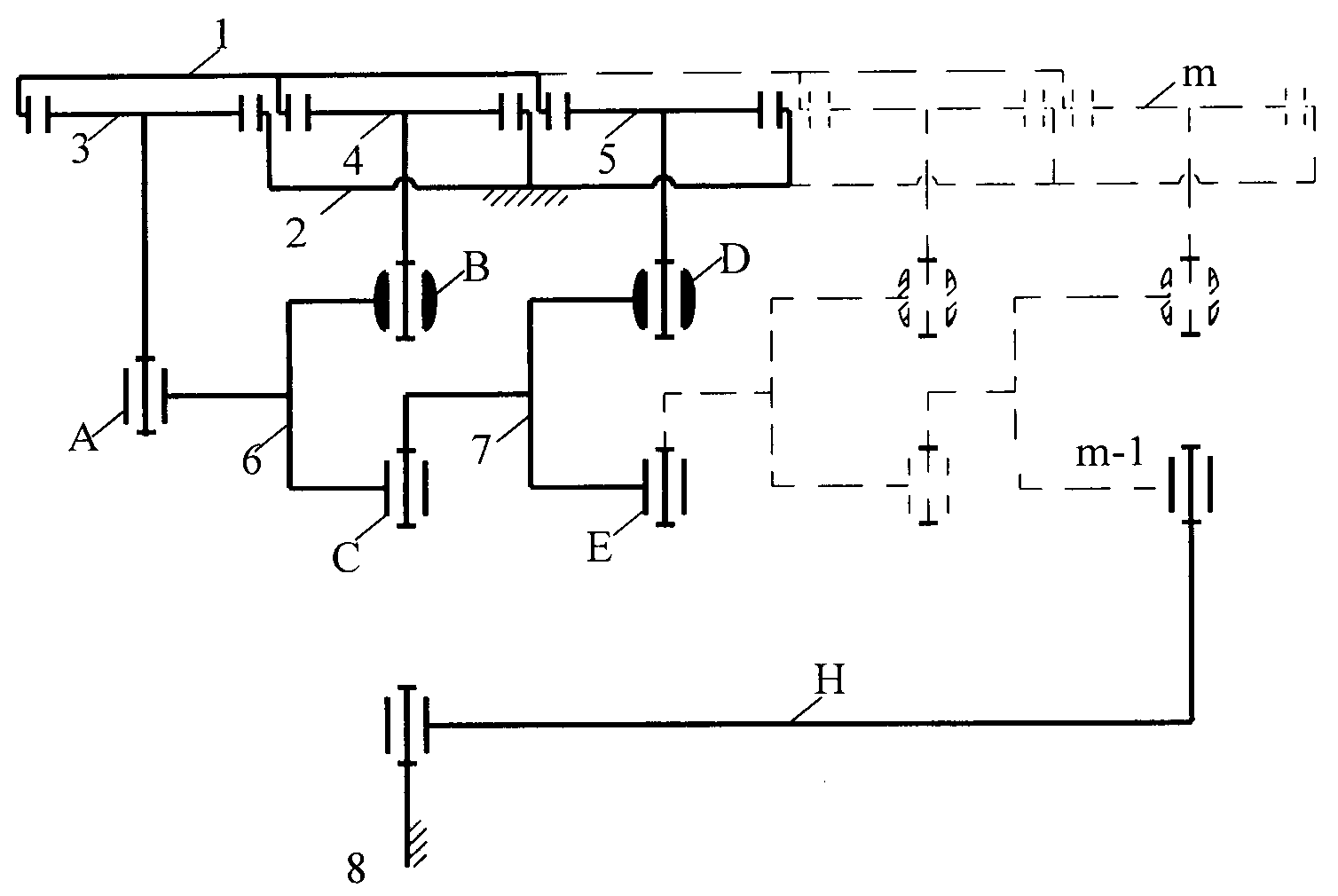
Самоустанавливающаяся шестисателлитная планетарная передача
Способ нанесения износостойких покрытий на основе алюминия и оксида иттрия на силумин
Механизм с перекатывающимся рычагом
Полноповоротный двухкривошипный плоский механизм с подвижным линейным гидроприводом
Трехподвижная кинематическая пара
Механизм поселье-липкина с кулисным рычагом
Трехщековая дробильная машина
Полный параллелограмм уатта с дополнительным шатуном
Двухуровневый манипулятор с замкнутой кинематической цепью
Четырехзвенный кулачковый механизм с изменяемым промежуточным звеном
Двухподвижная кинематическая пара
Щековая дробильная машина со взаимоподвижными щеками

