Результат интеллектуальной деятельности: Акустический фазовый пеленгатор
Вид РИД
Изобретение
Изобретение относится к робототехнике, а именно к аппаратуре для ориентации транспортных роботов по акустическому сигналу стационарного маяка или маяка ведущего транспортного устройства. В настоящее время получают распространение ведомые роботизированные транспортные средства доставки груза, следующие за ведущим устройством или определяющие место нахождения по опорным маякам. Для определения направления на ведущее устройство или маяк обычно применяют оптические системы [1, 2], однако в случае малопрозрачной среды (туман, дым в воздухе или замутнение в водной среде) ориентация на оптический маяк осложнена и даже невозможна. Для определения направления в таких случаях применяются акустические сигналы [3, 4]. Достаточно известны устройства для акустической пеленгации при выполнении подводных работ, такие как, например пеленгатор для водолазов по патенту РФ 2439602 [5], использующий амплитудный способ пеленгации, патент РФ 2494914 [6], использующий корреляционный способ. Оба патента предназначены для ориентации людей и не применимы в автоматизированных транспортных устройствах (роботах). Кроме того точность пеленгации таких устройств невысокая, порядка 10-20°.
Задачей данного изобретения является создание акустического пеленгатора для транспортных роботов с целью определения направления на акустический маяк.
Поставленная задача может быть решена применением радиофизических методов фазовой пеленгации (Чердынцев В.А. Радиотехнические системы: Уч. Пос. стр. 194-196) [7]. Указанные методы применимы и для гармонических звуковых волн, излучаемых непрерывно или периодическими пакетами. В отличие от радиочастотных пеленгаторов, нет необходимости акустические гармонические сигналы преобразовывать в промежуточную частоту, а обработку выполнять на применяемой звуковой (ультразвуковой) частоте. По построению измерительной базы близким к предлагаемому изобретению является патент РФ 2155352 [8], имеющий две одинаковые взаимно перпендикулярные измерительные базы.
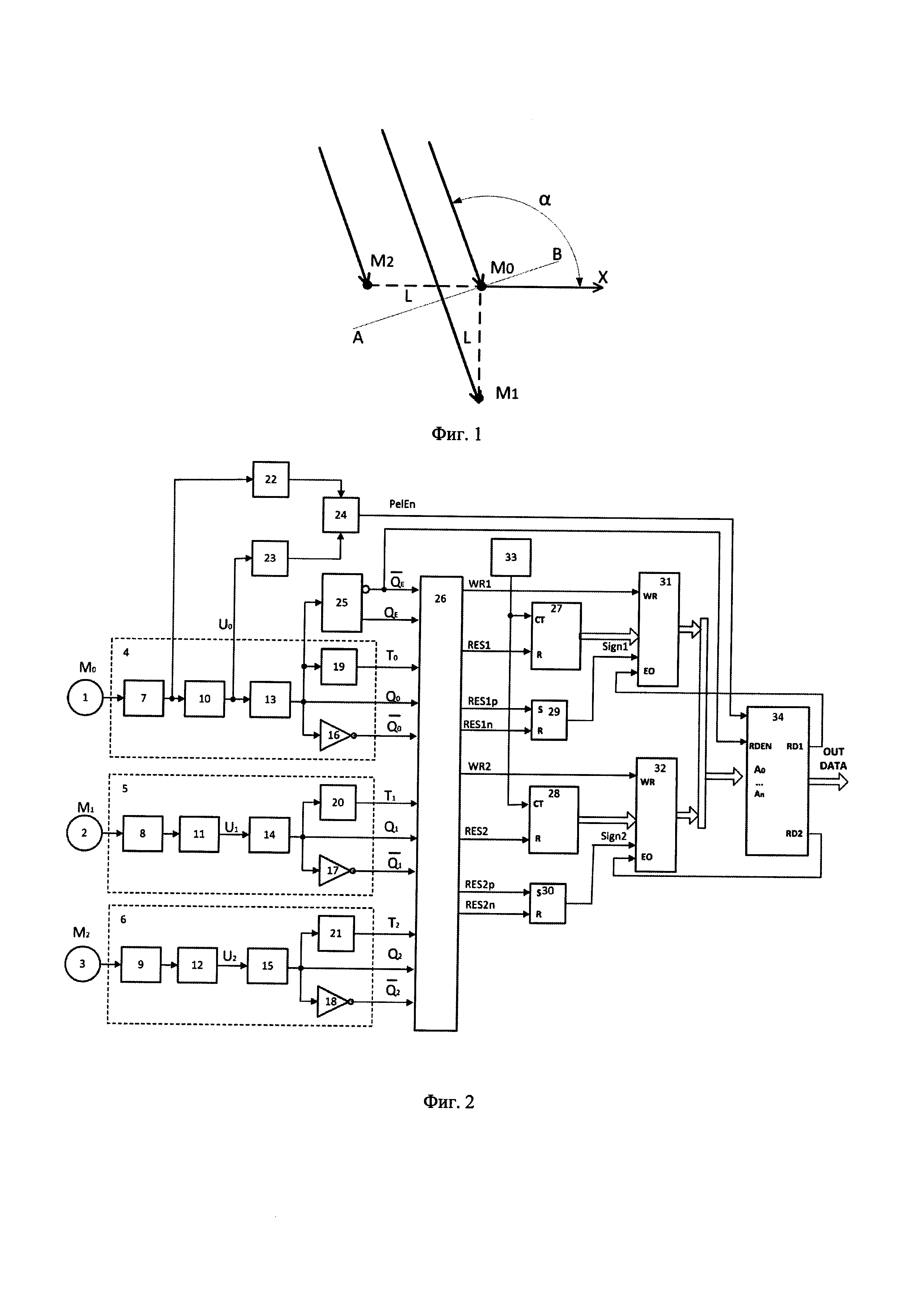
При пеленгации источника звукового сигнала на плоскости требуется минимум три ненаправленных микрофона для устранения неоднозначности определения горизонтального угла а между осью устройства и направлением на источник сигнала, как показано на фиг. 1.
На фиг. 1 показаны микрофоны M0, M1 и М2, образующие две взаимно перпендикулярные базы пеленгатора M0-M1 и М0-М2 с одинаковой длиной L. Акустический сигнал приходит под углом α относительно оси пеленгатора М0-Х. Линия АВ, проходящая через микрофон М0, совпадающий с центром координат пеленгатора, в определенный момент времени t0 совпадает с фронтом акустического сигнала. Разности фаз сигналов, снимаемых с микрофонов M1 и М2 относительно М0, определяются следующими выражениями:

где λ длина волны λ=; С - скорость звука в среде, F - частота сигнала.
Таким образом, азимут источника сигнала определяется по разностям фаз:
Или
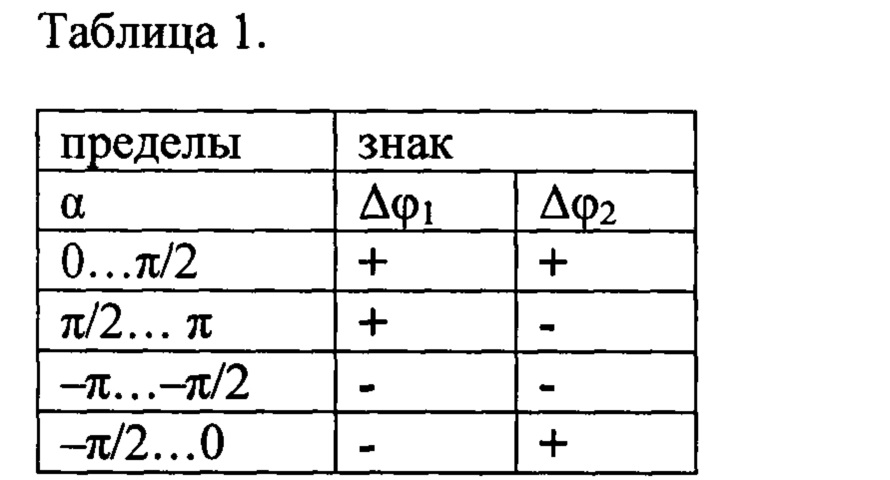
Для устранения неоднозначности значение измерительной базы должно удовлетворять условию L≤λ/2 и для расчета угла прихода а в пределах -π…π следует использовать знаки величин разностей фаз Δϕ1 и Δϕ2, приведенных в таблице 1.
Так как при измерении разностей фаз неизбежны погрешности, то следует учитывать, что при вычислении обратных тригонометрических функций результат будет иметь максимальную погрешность при абсолютных значениях аргумента близких к единице (0.8-1). Для снижения погрешностей преобразования следует выбирать (2) или (3) из сравнения абсолютных величин |Δϕ1| и |Δϕ2|. При |Δϕ1|≤|Δϕ2| для расчетов применять формулу (2), а при |Δϕ1|>|Δϕ2| - применять (3).
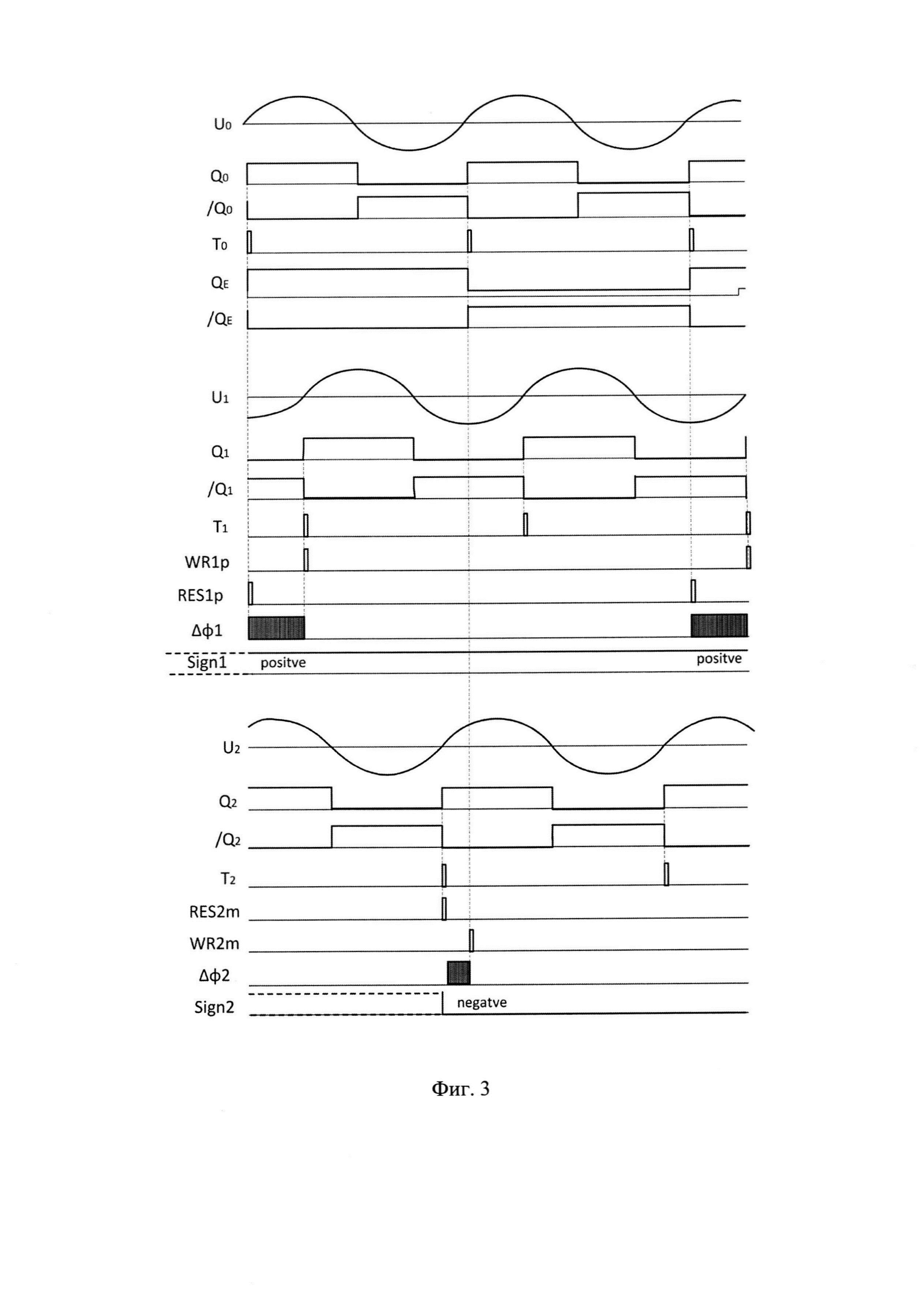
На фиг. 2 приведена блок-схема фазового акустического пеленгатора. Устройство содержит три микрофона 1, 2, 3, подключенных к трем одинаковым блокам предварительной обработки сигналов 4, 5, 6, каждый из них состоит из последовательно включенных предварительного усилителя 7, 8, 9, полосового фильтра 10, 11, 12 и усилителя - ограничителя 13, 14, 15, формирующего логические уровни. Выходы усилителей -ограничителей подключены ко входам инверторов 16, 17, 18, и формирователей коротких импульсов 19, 20, 21. У опорного канала 4, входной сигнал которого снимается с микрофона 1, расположенного в вершине прямого угла пеленгатора, выход предварительного усилителя 7 и выход полосового фильтра 10 подключены к входам выпрямителей 22 и 23, выходы которых соединены со входом схемы сравнения 24. Выход усилителя - ограничителя 13 опорного канала подключен к счетному входу делителя на два 25, прямой и инверсный выходы которого, а так же выходы всех усилителей - ограничителей 13-15, инверторов 16 - 18 и формирователей коротких импульсов 19-21 подключены к входам блока логики 26, выполняющим формирование сигналов в соответствии с таблицей 2. Выходы блока логики 26 соединены с входами сброса счетчиков 27, 28, входами сброса и установки триггеров знака 29, 30 и входами записи параллельных регистров 31, 32. К тактовым входам счетчиков 27, 28 подключен выход тактового генератора 33. Выходы счетчиков 27, 28 и триггеров знака 29, 30 подключены к входам данных регистров 31, 32. Трехуровневые выходы регистров 31, 32 через шину соединены с входами данных микроконтроллера 34, к другим входам которого подключены выход схемы сравнения 24, и один из выходов делителя на два 25. Два выхода микроконтроллера 34 соединены с входами разрешения вывода данных регистров 31, 32. Результат измерений выводится на выходной порт микроконтроллера 34.
Устройство работает следующим образом. Сигналы с микрофонов 1-3 усиливаются предварительными усилителями 7-9, далее полосовыми фильтрами 10-12 выделяется составляющая с рабочей частотой сигнала от маяка. В опорном канале 4, обрабатывающим сигнал микрофона Мо, с выхода усилителя 7 сигнал всего принимаемого частотного диапазона и с выхода фильтра 10 отфильтрованный сигнал поступают на выпрямители 22, 23, с которых средние уровни выпрямленных напряжений сравниваются схемой сравнения 24. При отсутствии полезного сигнала уровень на выходе фильтра 10 ниже уровня на выходе предварительного усилителя 7, при этом схема сравнения 24 подает сигнал отсутствия полезного сигнала на микроконтроллер 34. При появлении сигнала на рабочей частоте уровень сигнала на выходе фильтра 10 значительно возрастает и схема сравнения 24 подает на микроконтроллер 34 сигнал на разрешения определения пеленга PelEn.
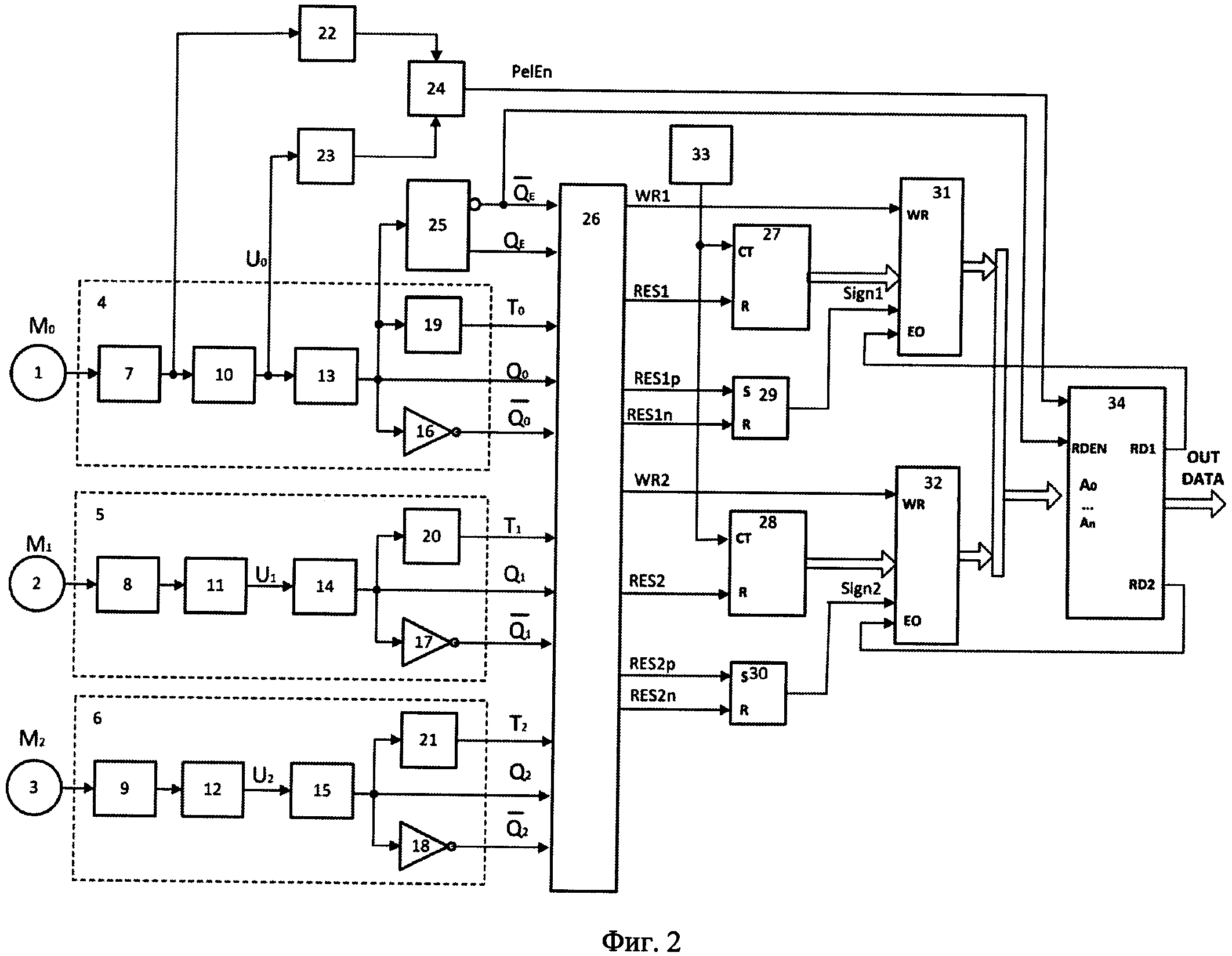
Вариант временных диаграмм при пеленгации приведен на фиг. 3.
Логические уровни с выходов усилителей - ограничителей 13-15, инверторов 16-18 и формирователей коротких импульсов 19-21, которые вырабатывают импульсы Т0, Т1, Т2 по положительным (либо, как вариант, отрицательным) фронтам с выходов усилителей -ограничителей 13-15, поступают на входы блока логики 26. Длительность импульсов Т0, Т1, Т2 не превышает половины периода счетных импульсов тактового генератора 33.
На выходах блока логики 26 вырабатываются сигналы по логическим функциям приведенным в таблице 2.
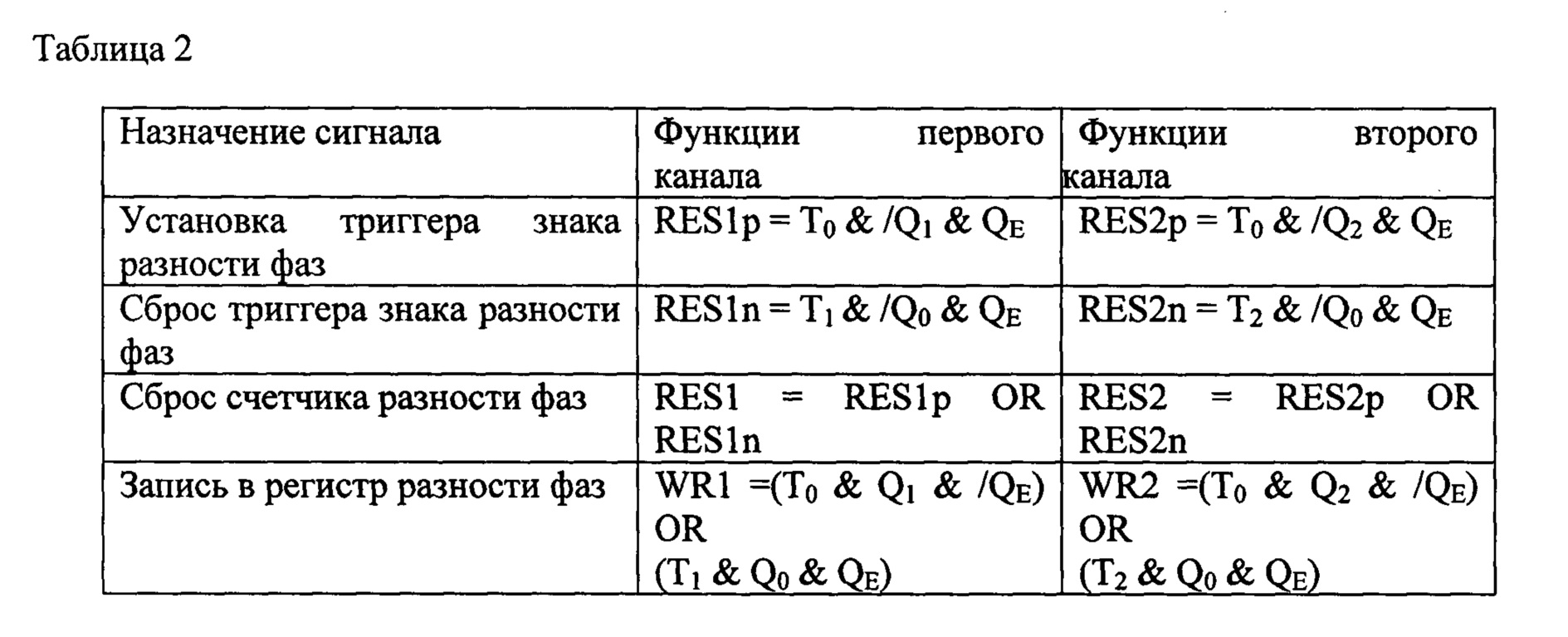
В зависимости от знака разности фаз триггер знака (29, 30) соответствующего канала устанавливается в «1» или сбрасывается в «0». На фиг. 3 приведен пример временных диаграмм для угла π/2<α<π, в этом случае разности фаз Δϕ1>0 и Δϕ2<0. Сигналы RES1 и RES2 обнуляют счетчики 27, 28 в начале интервала измерения разности фаз, а импульсы WR1 и WR2 передним фронтом записывают абсолютные значения разностей фаз |Δϕ1| и |Δϕ2| с выходов счетчиков 27, 28 и триггеров 29, 30 в параллельные регистры 31, 32 в конце интервалов измерения. Тактовая частота fclk на выходе тактового генератора 33 определяется величиной шага дискретизации измеряемых разностей фаз и для двоичных счетчиков разрядности N составляет π/2N. Таким образом для fclk необходимо соблюдение условия fclk≤F*(2N+1) во избежание переполнения счетчиков 27, 28. Чтобы значительно не увеличивать шаг дискретизации достаточно чтобы fclk ≈ F*(2N). Для транспортных роботов достаточно точности пеленгации 2-4°, что достижимо при разрядности двоичных счетчиков N=6-7 бит. Как положительная, так и отрицательная разности фаз измеряются в течение полупериода уровня «1» на выходе QE делителя на два 25. Уровень «1» с инверсного выхода /QE, подаваемый на микроконтроллер 34 сообщает о готовности данных. Чтение данных с регистров 27, 28 микроконтроллером 34 выполняется поочередной подачей разрешающих уровней на входы разрешения трехуровневых выходов регистров 127, 28. Обработка полученных данных заключается в выборе из постоянной памяти микроконтроллера 34 запрограммированных основных значений обратных тригонометрических функций по результатам считывания разностей фаз Δϕ со счетчиков 27, 28 в зависимости от их соотношения, а так же учета дополнений, кратных π/2, в зависимости от знаков разностей фаз Δϕ. Результат измерений угла и признак обнаружения сигнала маяка выводится на выходную шину (OUT DATA) микроконтроллера 34.
Источники:
1. Власов С.М., Бойков В.И., Быстров С.В., Григорьев В.В. Бесконтактные средства локальной ориентации роботов. - СПб: Университет ИТМО, 2017. - 169 с.
2. Карпов В.Э., Платонова М.В. СИСТЕМА НАВИГАЦИИ МОБИЛЬНОГО РОБОТА (Москва, Московский Энергетический Институт (Технический Университет), Россия /docplayer.ru/
3. Тихомиров А.В., Иванов М.С., Омельянчук Е.В. Разработка акустического пеленгатора. Труды МАИ. Выпуск №90
4. Качармина Е.Г., Глазков В.В. Разработка модели акустического пеленгатора в пакете MATLAB; электронный журнал «молодежный научно-технический вестник», ФГБОУ МГТУ им. Баумана, №11, 2015 г.
5. Кранц В.З., Островский Д.Б. Устройство и способ определения водолазом направления на источник звукового сигнала; патент на изобретение RU 2439602 С2, кл. G01S 3/802: 10.01.2012 Бюл. №1, (fips.ru).
6. Берков Ю.А. Пеленгатор водолаза; патент на изобретение RU 2494914 С1, кл. G01S 3/802: 10.10.2013 Бюл. №28, (fips.ru).
7. Чердынцев В.А. Радиотехнические системы: Учеб. Пособие для вузов. - Минск.: Выш. Шк., 1988, - 369 с.: ил.
8. Дикарев В.И., Гумен С.Г., Журкович В.В. и др. Фазовый способ пеленгации и фазовый пеленгатор для его осуществления; патент на изобретение RU 2155352 С1, кл. G01S 3/46: 27.04.2003 Бюл. Изобр. №12/2003.
Акустический пеленгатор для определения направления на маяк, излучающий акустический гармонический сигнал в непрерывном режиме или в виде повторяющихся посылок, содержащий три подключенных к предварительным усилителям ненаправленных микрофона, расположенных в вершинах равнобедренного прямоугольного треугольника, катеты которого не превышают половины длины волны принимаемого сигнала, отличающийся тем, что с целью его применения в автономных транспортных роботах производится выделение полезного сигнала из всего спектра принимаемых акустических сигналов, шумов и помех и для дальнейшей цифровой обработки, заключающейся в однозначном определении цифрового значения пеленга с минимизацией погрешности, выходы предварительных усилителей подключены к настроенным на рабочую частоту полосовым фильтрам, при этом для формирования признака наличия сигнала рабочей частоты выходы предварительного усилителя и полосового фильтра одного из каналов соединены с входами выпрямителей среднего значения, выходы которых подключены к входам схемы сравнения, а ее выходной логический сигнал поступает на микроконтроллер, а для дальнейшей цифровой обработки выходы полосовых фильтров подключены к входам усилителей-ограничителей, формирующих на своих выходах логические уровни которые поступают на входы инверторов, формирователей коротких импульсов и на входы блока логики, другие входы которого соединены с выходами инверторов и формирователей коротких импульсов, при этом к выходу усилителя-ограничителя опорного канала подключен тактовый вход делителя на два, прямой и инверсный выходы которого соединены с входами блока логики, одна группа выходов которого соединена с входами сброса и установки триггеров знака фазы и входами сброса счетчиков, тактовые входы последних подключены к генератору тактовых импульсов, при этом вторая группа выходов блока логики подключена к входам записи параллельных регистров, входы данных которых соединены с выходами счетчиков и триггеров знака фазы, а выходы параллельных регистров подключены к шине входных данных микроконтроллера, вход разрешения чтения данных которого соединен с одним из выходов делителя на два, при этом выходы управления периферийными устройствами микроконтроллера соединены с входами разрешения выходов параллельных регистров, а определение угла на источник сигнала выполняется чтением значения из постоянной памяти микроконтроллера, в которой зашита таблица преобразования сдвига фаз в угол направления на источник относительно оси устройства, при этом значение выводится на выходную шину микроконтроллера.