Результат интеллектуальной деятельности: ТРЕНАЖЕР ДЛЯ ГОРНОЛЫЖНИКОВ И СПОСОБ ТРЕНИРОВКИ НА НЕМ
Вид РИД
Изобретение
Группа изобретений относится к области спорта, в частности к способам обучения горнолыжным дисциплинам и устройствам для упражнений и приобретения навыков катания на горных лыжах.
Его модификации можно использовать для других технических видов спорта, таких как виндсерфинг, кайтбординг, водные лыжи, сноуборд и некоторым другим, а также к устройствам для развлечений.
Известны ряд способов обучения и тренировки горнолыжников, сноубордистов и воднолыжников вне реальных трасс, а также устройств (тренажеров), посредством которых реализованы такие способы.
Из уровня техники известен "Способ тренировки горнолыжников и сноубордистов и устройство для его осуществления».
Способ тренировки заключается в том, что осуществляют имитацию прохождения поворотов путем приложения усилия, направленного перпендикулярно продольной оси имитаторов. Кроме того, осуществляют перемещение вверх и/или вниз носовой и хвостовой частей имитаторов В устройстве имеются датчики угла кантования имитаторов лыж или сноуборда, выход которых подключен к входу блока управления, выход которого подключен к силовому приводу. Спортсмен кантует имитаторы в ту или другую стороны, имитируя прохождение поворотов. В зависимости от угла кантования блок управления воздействует на первый силовой привод, который воздействует с разным усилием на имитаторы лыж. Одновременно с выхода компьютера информация о профиле имитируемого склона горнолыжной трассы поступает на блок управления, который формирует сигналы на второй силовой привод и реализуется воздействие к носовым и/или задним частям имитаторов, обеспечивая требуемый угол наклона между продольной осью имитаторов и горизонтальной плоскостью. Для защиты спортсмена от травм в изобретении применены амортизирующие элементы в виде сетки, (патент RU 2 354 427 С2).
Из уровня техники известен «Тренажер для горнолыжников и слаломистов», содержащий наклонное основание, несущее имитаторы лыж, вращающиеся вокруг осей, оси установлены на основании в области носков лыж, а по бокам основания установлены поручни на линии носков лыж.
Способ тренировки горнолыжника на этом тренажере осуществляется с помощью сгибания и наклона коленей в сторону осевой линии, имитируя тем самым как закантовку лыж, так и центростремительную силу, обуславливающие ведение лыж по дуге в повороте. После этого, опираясь руками на поручни, разгружают имитаторы лыж и ногами переводят их в противоположную сторону до упора-ограничителя, сохраняя положение тазобедренного сустава над центральной осевой линией.(патент RU 2 261 744 С1).
Известен «Универсальный тренажер», содержащий опорный диск с осью вращения, на которой закреплен диск вращения с возможностью регулировки нагрузки на тренируемые группы мышц.
В способе тренировки на данном тренажере задачей является комплексная тренировка мышц, укрепление суставов и связок, (полезная модель RU 112 833 U1)
Известен «Спортивный тренажер». В конструкцию входит основание в виде цилиндра, имеющего в развертке волнообразный вид и подвижная платформа, на диаметрально противоположных сторонах которой, установлены два ролика, опирающиеся на верхнюю кромку цилиндра основания.
Спортсмен становится на платформу. Попеременно, нажимая то одной, то другой ногой на платформу, спортсмен заставляет устройство вращаться, (полезная модель RU 117 093 U1).
Известен "Тренажер для горнолыжников», включающий опорную раму, опору для рук и имитаторы лыж. Опорная рама имеет дугообразную направляющую и шарнирно соединена с кареткой на опорных роликах. На каретке установлены передние и задние опоры, с шарнирно закрепленными на них имитаторами лыж с креплениями для обуви. Передние опоры выполнены с возможностью вращения имитаторов лыж вокруг продольной оси опоры, задние опоры выполнены с возможностью отклонения от продольной оси опоры, а также с возможностью изменять места установки опор на каретке и имитаторах лыж. Опора для рук выполнена с возможностью регулировки положения.
Способ тренировки заключается в том, что осуществляют имитацию движений и стойки при поворотах, путем приложения усилий направленных по дуге относительно продольной оси тренажера. Кроме того, имитируется резаный поворот путем дополнительного поворота имитаторов лыж в сторону поворота. Имитируя прохождение трассы, спортсмен усилием ног, преодолевает сопротивление силового элемента и упругость опор одновременно закантовывает имитаторы лыж. Это достигается с помощью сгибания и наклона коленей в сторону осевой линии тренажера. При этом спортсмен удерживает положение тазобедренного сустава тела над продольной осевой линией тренажера, сохраняя стойку спуска поддержкой за опору для рук (полезная модель RU 90 340 U1).
Известен «Лыжный симулятор», который выполняет игровую программу в ответ на управляющий сигнал, выдаваемый игроком путем вращения имитационных лыж, для отображения объекта лыжника, соответствующего игроку, на устройстве отображения. Игровой автомат для лыж содержит: детектор вращения лыжи для генерации управляющего сигнала путем определения направления и степени вращения имитационной лыжи; блок управления для получения данных о положении, показывающих текущее положение лыжника на лыжной трассе в соответствии с данными лыжной трассы и управляющие сигналы, генерирующие множество данных, показывающие трассу лыж, лыжника в соответствии с данными о положении, сохраняя множество данных, когда лыжник катается на лыжах на лыжной трассе, и генерируют данные отображения трассы для отображения на устройстве отображения в соответствии с сохраненным множеством данных трассы; и дисплей для отображения лыжной трассы с трассой лыж в соответствии с данными отображения трассы, сгенерированными блоком управления. (US 2001049322).
Из уровня техники известен «Тренажер лыжного склона с устройством воспроизведения видеокассет - имеет управляемый компьютером видеодисплей, на который накладывается изображение лыжника в соответствии с измерениями положения лыж на подставке». Тренажер имеет в своем составе устройство для моделирования лыжной трассы с использованием подставки, в которой установлены подвижные пары лыж и видеоэкран для изображения лыжного склона. Внутри подставки имеется датчик для измерения угла наклона лыж, а также другие датчики для определения сил и моментов. Имеется устройство воспроизведения видеосигнала для записанных реальных изображений в направлении движения лыжника. Генератор видеосигнала создает изображения одного и того же направления движения для разных форм поворотов и фаз движения. Имеется устройство для синхронизации реального изображения и полученного от генератора видеосигнала, а также устройство для смешивания синтетического изображения с реальным изображением от устройства отображения видео. Имеется компьютер для управления устройством воспроизведения видеосигнала в соответствии с планом тренировок или в зависимости от движения лыж. (DE 4002223).
Известен «Способ обучения и тренажер слаломиста». Тренажер содержит основание, опорный элемент, который установлен на нем таким образом, чтобы его можно было перемещать вправо-влево, платформу, которая расположена на указанном элементе таким образом, что имеет возможность вращения периодически то по часовой стрелке, то против часовой стрелки, и снабжена опорной поверхностью для ног слаломиста, лыжника или сноубордиста и осциллирующий кривошипно-шатунный механизм для синхронизации и реверсирования несущего элемента смещений и поворота платформы. Кривошип прикреплен к основанию и выполнен таким образом, что установленный на нем ползун имеет закрытую траекторию движения и может перемещаться вдоль кривошипа в одном направлении и обеспечивает закон движения платформы относительно основания в соответствии с законом движения относительно поступательного движения, когда ноги слаломиста, лыжника или сноубордиста смещаются вправо - влево и их угловое положение изменяется во время указанного вращения и/или смещения. Способ обучения и тренировки слаломиста, при котором перемещение стоп ног, лыж или сноуборда вместе с платформой влево - вправо и их вращение периодически по или против хода часовой стрелки осуществляют свободно под действием усилия слаломиста или принудительно приводом перемещения. (ЕА 200601329 А1).
Известен «Тренажер лыжника или сноубордиста и метод обучения с его использованием». Способ проведения тренировки на лыжах или сноуборде, при котором ноги обучающегося человека располагаются на тележке, которая движется по основанию вдоль одной из его длинных сторон, при этом происходит освобождение ног благодаря седлу, которое прикреплено к стреле, размещенной над основанием. Седло позволяет легко приподнимать корпус вверх для перевода ступней ног с одной стороны на другую в боковых направлениях с возможностью поворота и наклона стоп, (изобретение US 2014243162).
Недостаток известных устройств и способов тренировки горнолыжников на них заключается в том, что они не обеспечивают тренировку правильных навыков выполнения поворотов, так как в большинстве из них поворот выполняется только за счет вращения стоп и наклона коленей спортсмена в лучшем случае боковые перемещения под корпусом.
В способах тренировки на известных тренажерах при имитации прохождения поворотов никак не отрабатываются навыки перемещения корпуса пользователя относительно стоп и стоп относительно корпуса, как в боковом, так и в продольном направлении, не создаются нагрузки, эквивалентные реальным нагрузкам, действующим на лыжника, совершающего повороты на горнолыжной трассе.
Наиболее близким техническим решением к заявляемой группе изобретений « Тренажеру для горнолыжников и способу тренировки на нем» по совокупности признаков является «Лыжный спортивный тренажер и способ тренировки движений лыж или доски». Лыжный тренажер согласно изобретению представляет собой устройство, в котором установлен робот-манипулятор с одной или двумя руками робота, по одной на каждую лыжу. Эти руки робота-манипулятора управляются программой симуляции для имитации движений лыж и/или доски. В программе симуляции хранятся различные движения лыж или доски по разным сценариям. Тренажер состоит из платформы, на которой стоит пользователь. Платформа соединена через соединительный элемент с рукой робота-манипулятора. На соединительном элементе расположен датчики сил и моментов, которые пользователь прикладывает к платформе, а также датчики угла и/или положения. Для защиты пользователя вокруг платформы расположены площадки. Между этими площадками и платформой расположены сети, с тем, чтобы уменьшить риск травмирования в случае падения пользователя. Кроме того, на основании данных с датчиков ограничиваются диапазоны движений, чтобы избежать травмирования пользователя. Робот также может состоять из линейных осей и наклонных соединений или параллельного механизма. Это означает, что не обязательно использовать серийный робот, а к разъему платформы может быть прикреплен трехосевой поворотно-наклонный блок с тремя степенями свободы вращения для обеспечения шестиосевого привода. Как вариант, предусматривается соединительный элемент таки образом, чтобы к руке робота-манипулятора можно было поочередно прикреплять лыжи или доску, это позволит тренировать различные виды спорта. Тренажер содержит контроллер для управления движениями руки робота-манипулятора, так что движения реальных лыж и/или доски моделируются на основе программы моделирования. На основании программы моделирования и выбранного сценария пользователю показывается визуальное представление этого сценария на устройстве отображения. Устройство визуального отображения может, обеспечивать двух- или трехмерное представление моделируемого сценария на экране или в очках, одетых на пользователя. Виртуальная среда пользователя может выводиться с дополнительным представлением пользователя или без него. Обнаруживая силы и моменты на доске или лыжах, контроллер, используя программу моделировании, дает команды на выполнение движений роботов-манипуляторов и отражает эти движения на экране устройства отображения. Конструкция позволяет вращать имитаторы лыж и/или доски рукам робота-манипулятора вокруг трех осей и перемещаться вдоль трех осей.
Способ тренировки горнолыжников, при котором осуществляют имитацию прохождения поворотов путем перемещения стоп, закрепленных на платформах имитаторов лыж, с помощью рук роботов-манипуляторов, где движения выполняются с использованием программы моделирования. Способ тренировки заключается в перемещении стоп с имитаторами лыж или доски в требуемых направлениях в соответствии со сценарием, представленным на экране, (изобретение DE 102012209569).
Недостатки ближайшего аналога заключаются в следующем:
- Способ тренировки на данном тренажере не позволяет вырабатывать навыки для выполнения современных горнолыжных поворотов, так как не позволяет контролировать положение корпуса горнолыжника по отношению к стопам.
- Датчики не обеспечивают контроля всех параметров, в частности положения и скорости перемещения стоп и корпуса, а также сил, действующих на корпус. Тем самым не обеспечиваются параметры, обеспечивающие безопасность пользователя.
- Заложенная в конструкцию защитная сеть, будет провисать, что не безопасно и не позволяет имитировать реальную конфигурацию склона.
- Конструкцией тренажера не предусмотрено создание имитации сил, действующих на горнолыжника при его движениях на реальной трассе.
Техническая задача группы предполагаемых изобретений (устройства и способа) заключается в создании тренажера для горнолыжников и способа тренировки на нем навыков, необходимых горнолыжнику, за счет контроля взаимоположения стоп и корпуса горнолыжника во всех фазах поворота, в обеспечении возможности контроля скорости перемещений, как стоп, так и корпуса горнолыжника, в возможности создания полного ощущения тех нагрузок, которые действуют на горнолыжника при спуске по реальным трассам и в то же время обеспечение полной безопасности во время тренировки.
Поставленная задача решается тем, что тренажер для горнолыжников, содержащий платформу, установленные на ней имитаторы лыж, каждый из которых соединен через соединительный элемент со своей рукой робота-манипулятора, контроллеры для управления движением рук роботов-манипуляторов, кроме того, датчики положения имитаторов лыж и сил, действующих на имитаторы лыж, защитные сетки, в отличие от ближайшего аналога дополнительно содержит седло для крепления корпуса горнолыжника (пользователя), которое через соединительный элемент соединено с рукой дополнительного робота-манипулятора, контроллер для управления движением этого робота-манипулятора и датчики положения корпуса горнолыжника (пользователя), скорости перемещения корпуса горнолыжника (пользователя) сил, действующих на корпус горнолыжника (пользователя), и датчики скорости перемещения имитаторов лыж, кроме того, защитные сетки снабжены системой роликов и натяжителей.
Поставленная задача решается тем, что в способе тренировки горнолыжников, при котором осуществляют имитацию прохождения поворотов путем перемещения стоп пользователя, закрепленных на платформах имитаторов лыж, с помощью рук роботов-манипуляторов, где движения выполняются с использованием программы моделирования, в отличие от ближайшего аналога дополнительно осуществляют перемещение корпуса горнолыжника (пользователя), закрепленного в седле, с помощью дополнительной руки робота-манипулятора, где движения выполняют с использованием программы моделирования, кроме того, при осуществлении имитации поворотов осуществляют создание усилий на стопы через имитаторы лыж и на корпус горнолыжника (пользователя) через седло с помощью рук роботов-манипуляторов, работающих в режиме поддержания заданных усилий, задаваемых программой моделирования.
Сущность группы изобретений заключается в следующем.
Современный горнолыжный поворот выполняется за счет движений, обеспечивающих правильное взаимоположение корпуса горнолыжника и его стоп в каждой отдельной фазе поворота. От горнолыжника требуется очень быстро менять в правильных направлениях положение корпуса относительно стоп и стоп относительно корпуса. При выполнении поворота корпус горнолыжника движется относительно стоп по траектории, условно напоминающей 8-ку, расположенную поперек траектории спуска. Аналогично стопы горнолыжника двигаются относительно его корпуса по траектории, также напоминающей 8-ку, но в противоположном направлении. Точка пересечения двух овалов каждой 8-ки - это короткая фаза между предыдущим и новым поворотом - нулевая фаза. В нулевой фазе корпус горнолыжника на короткое время оказывается посередине между его стопами, как в боковом направлении, так и в продольном направлении.
При выполнении поворота горнолыжнику приходится прикладывать усилия из-за действующих на него центробежных сил.
Предлагаемый тренажер имеет седло, соединенное с рукой робота-манипулятора, что позволяет отслеживать взаимное положение стоп и корпуса пользователя и управлять им. Дополнительные датчики отслеживают усилия на корпус, положение корпуса, а также скорости перемещений корпуса и стоп пользователя. За счет наличия системы роликов и натяжителей поддерживается плоскость из полотна (или сетки) между подвижными платформами с имитаторами лыж и неподвижными площадками, создавая подобие сплошного склона, на которое в том числе можно упираться лыжными палками, находящимися в руках пользователя.
Тренажер позволяет осуществлять движения принудительно приводами, воздействующими на пользователя через руки роботов-манипуляторов, принуждая пользователя к выполнению правильных движений. С другой стороны, тренажер через руки роботов-манипуляторов оказывает на пользователя имитацию центробежных сил, в то время как пользователь самостоятельно выполняет движения для поворотов.
Тренажер может быть использован как для начальной отработки правильных навыков поворотов пользователей, так и для корректировки и закрепления правильных навыков у опытных горнолыжников.
Конструкция и программное обеспечение тренажера дают возможность начинать отрабатывать необходимые навыки в очень медленном темпе. Если при поворотах на реальном склоне корпус горнолыжника, сильно смещающийся относительно стоп, удерживается от падения центробежными силами, возникающими при выполнении поворотов на большой скорости, то на тренажере эти центробежные силы, позволяющие удерживать корпус пользователя от падения, можно имитировать и при замедленных движениях.
Многократное повторение цикличных перемещений стоп и корпуса пользователя на тренажере позволяет закрепить правильные навыки и оказывает на пользователя воздействия, максимально подобные в своей совокупности тем, которые возникают в реальных условиях прохождения горнолыжной трассы с получением соответствующих ощущений.
Сущность предполагаемой группы изобретений поясняется графическими материалами, где
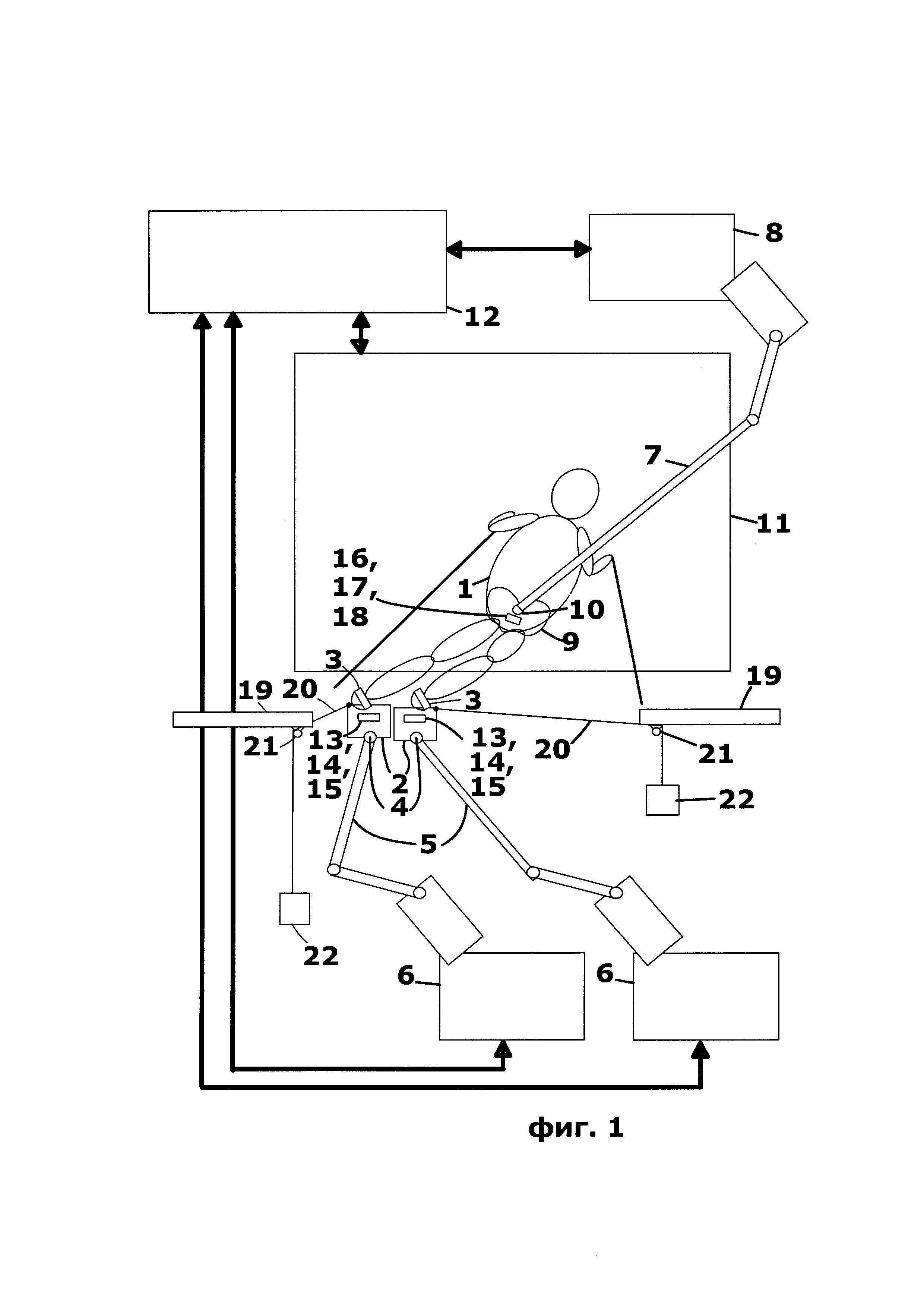
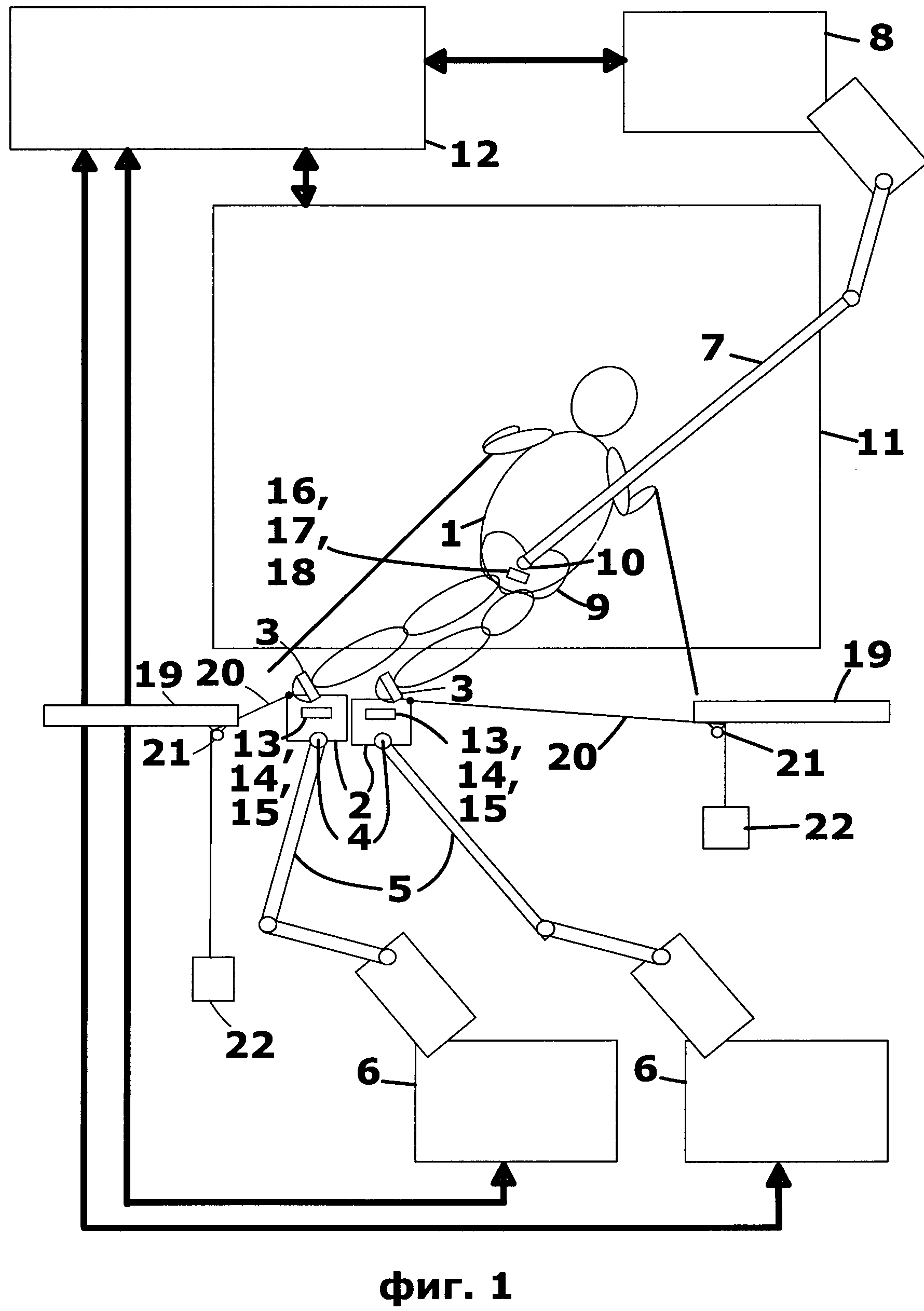
На фиг. 1 изображена конструкция тренажера для горнолыжников.
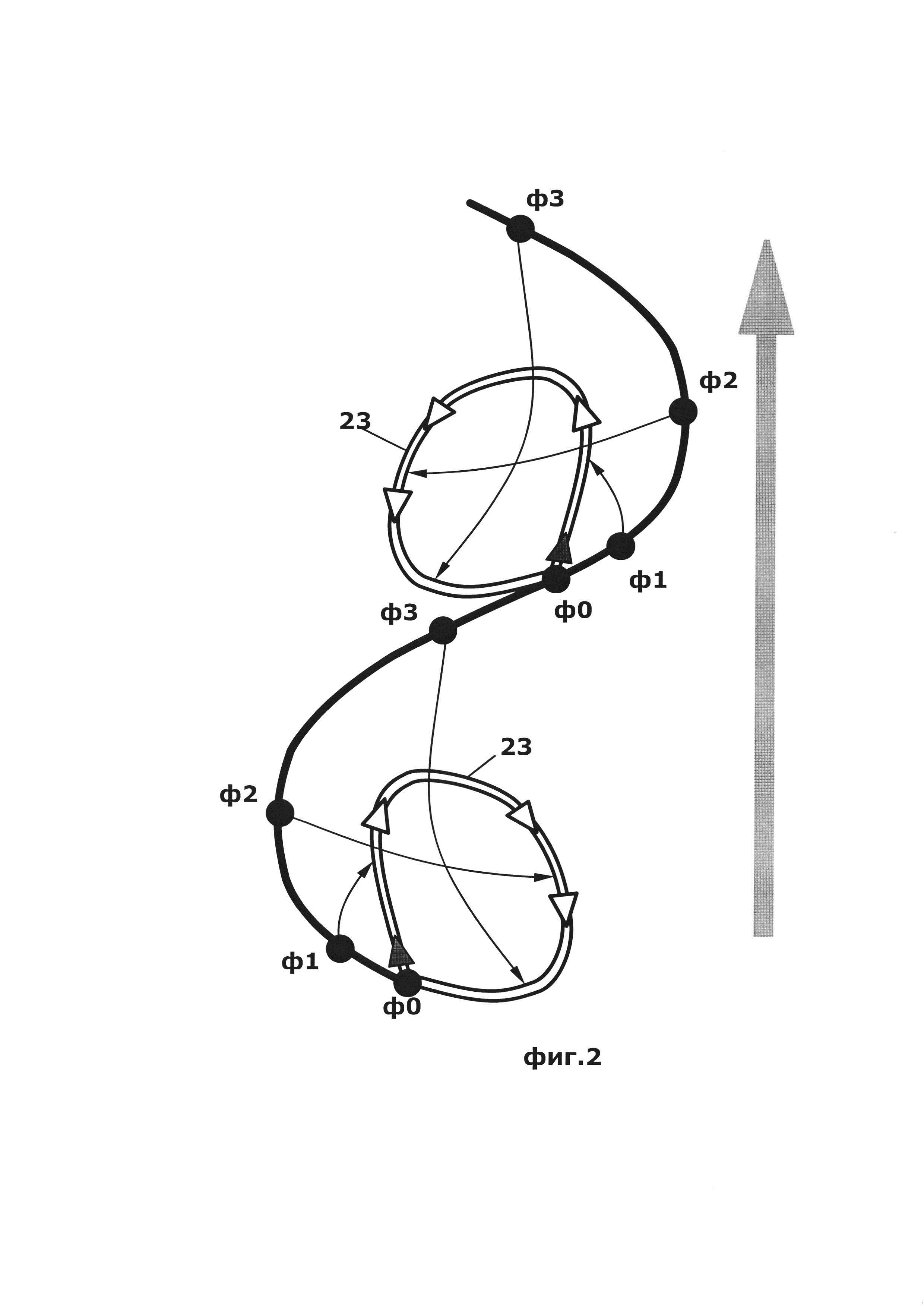
На фиг. 2 изображена траектория перемещения корпуса горнолыжника по ходу выполнения поворотов.
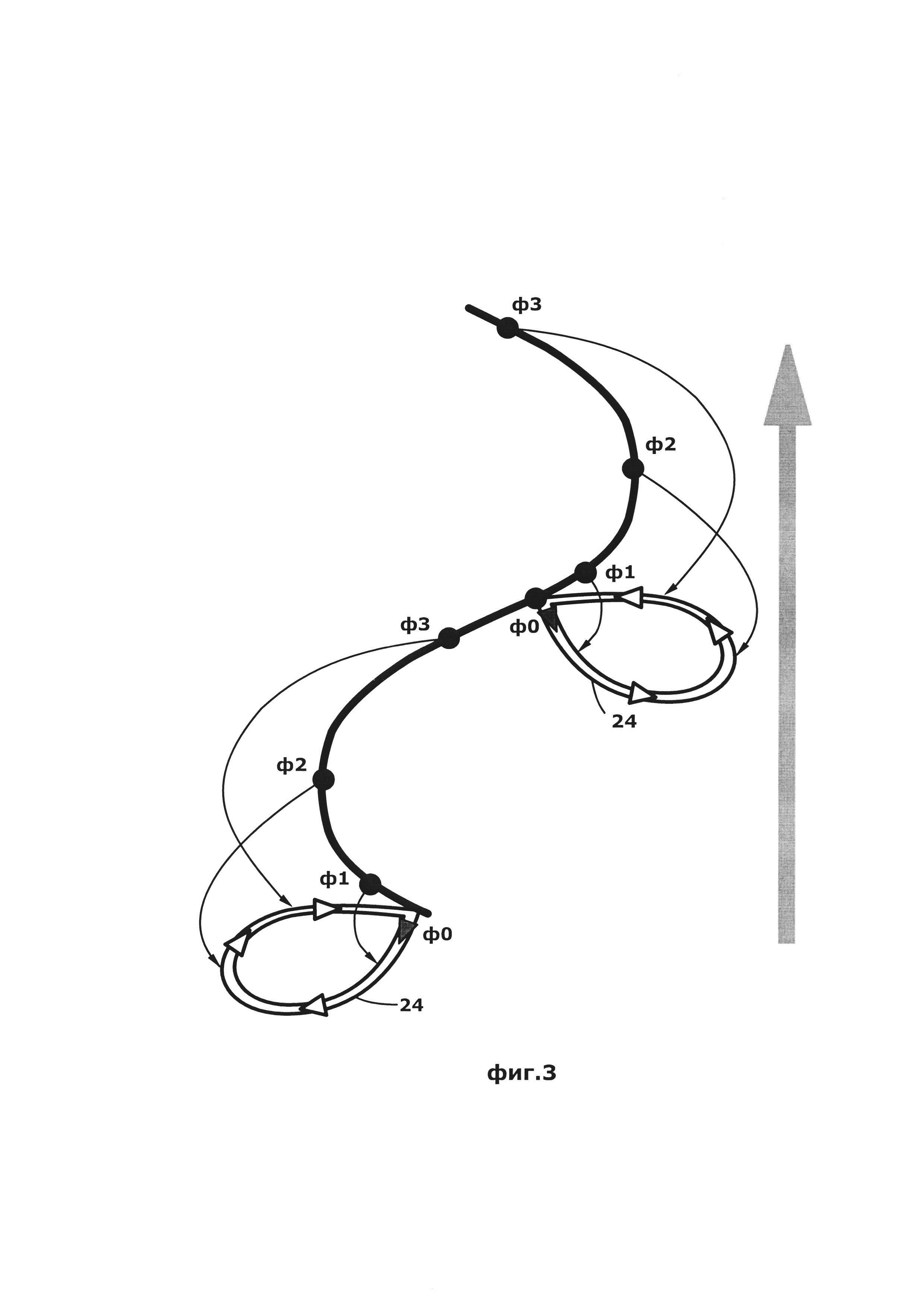
На фиг. 3 изображена траектория перемещения стоп горнолыжника по ходу выполнения поворотов.
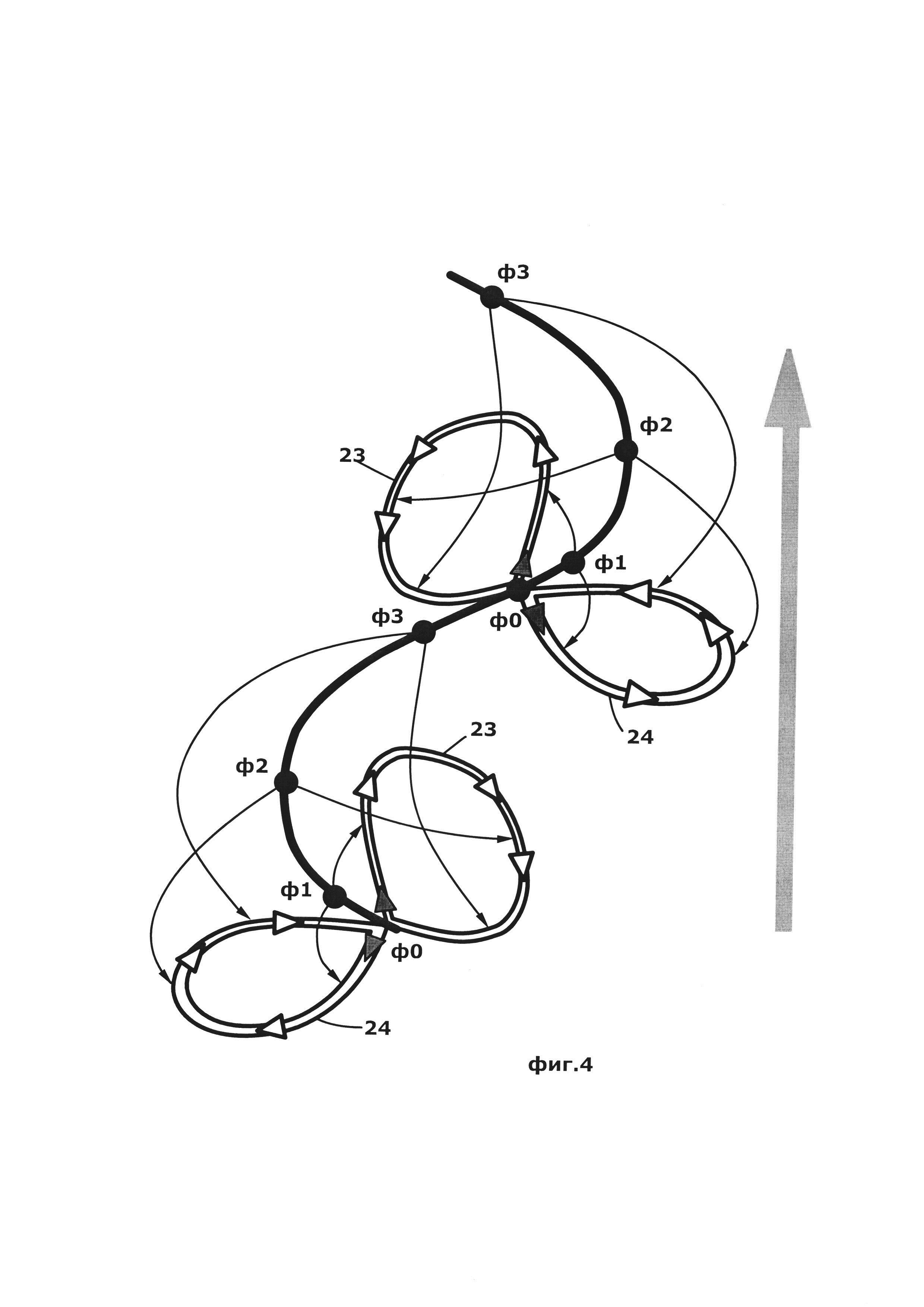
На фиг. 4 изображены траектории одновременного перемещения корпуса и стоп горнолыжника по ходу выполнения поворотов.
Тренажер (фиг. 1) состоит из платформ 2 с имитаторами лыж 3, на которых стоит пользователь 1. Имитаторы лыж 3 соединены с платформами 2 так, что есть возможность небольших перемещений имитатора 3 относительно платформы 2 в продольном направлении, упруго поворачиваться относительно вертикальной оси, а также упруго наклоняться в продольном и в поперечном направлении. Платформы 2 соединены через соединительный элемент 4 с руками 5 роботов-манипуляторов 6. Еще одна рука 7 дополнительного робота-манипулятора 8, воздействует на корпус пользователя 1 через седло 9. Крепление 10 седла 9 к корпусу пользователя 1 и к руке 7 робота 8 с одной стороны оставляет полную свободу движений пользователя 1, с другой стороны позволяет передавать все взаимные движения от руки 7 робота 8 на корпус пользователя 1 и от корпуса пользователя 1 на руку 7 робота 8. Управление приводами роботов-манипуляторов 6, 8, а также фильмами на экране 11 (или в виртуальном шлеме) выполняется блоком контроллеров 12.
Имеются датчики положения 13, скорости 14 и сил 15, которые пользователь 1 прикладывает к имитаторам лыж 3 и/или сил, действующих на пользователя со стороны имитаторов лыж. Датчики 13, 14 и 15 условно расположены на платформах 2. Имеется система датчиков положения 16, скорости перемещения 17 корпуса пользователя 1 и усилий 18, действующих на корпус пользователя 1. На рисунке эта система датчиков 16, 17 и 18 условно показана на седле 9. Место установки каждого датчика зависит от типа применяемого датчика и выбирается исходя из цели получения максимально достоверного сигнала.
Для защиты пользователя 1 вокруг платформ 2 расположены площадки 19. Для уменьшения риска травмы в случае падения пользователя 1 имеются сетки (или полотно) 20. Имеется система поддержания плоскости сетки (или полотна) 20 между платформами 2 и площадками 19, за счет системы роликов 21 и натяжителей 22.
Кроме того, чтобы избежать травмирования пользователя 1, на основании данных с датчиков 13, 14, 15, 16, 17, 18 управляющими сигналами блока контроллеров 12, приводами роботов-манипуляторов 6, 8 ограничиваются диапазоны и скорости движений, а также усилия, действующие на стопы в имитаторах лыж 3 и корпус пользователя 1 в седле 9.
В тренажере не обязательно использовать серийные роботы-манипуляторы. Это означает, что к разъемам 4 платформ 2 и к разъему 10 седла 9 могут быть прикреплены трехосевые поворотно-наклонные блоки с тремя степенями свободы вращения для обеспечения шестиосевого привода.
Возможен вариант конструкции тренажера с дополнительными роботами-манипуляторами, которые своими руками воздействуют на колени пользователя и дополнительными датчиками, принимающими сигналы о положении коленей (контроль параллельности голеней), о скорости их движения и о прилагаемых на них усилиях. В другом варианте возможны бесконтактные датчики контроля положений коленей.
Возможен вариант с использованием дополнительных роботов-манипуляторов, которые своими руками воздействуют на плечи пользователя и дополнительными датчиками, принимающими сигналы о положении плеч, о скорости их перемещения и о действующих на них усилиях.
Пользователь может удерживать равновесие с помощью палок, опирающихся на пол или на основание.
В случае использования тренажера для тренировок элементов виндсерфинга перед пользователем может устанавливаться имитация гика паруса.
Тренажер для горнолыжников работает следующим образом.
Стопы ног пользователя 1 (возможно в горнолыжных ботинках) закрепляют в крепления имитаторов лыж 3 на платформах 2 тренажера. На голову пользователя 1 надевают виртуальный шлем (в варианте со шлемом, при другом варианте перед пользователем 1 экран 11, на котором он видит картину склона с поворотными древками). К корпусу пользователя 1 устанавливают и закрепляют седло 9, предназначенное для контроля корпуса пользователя 1. В руках пользователя 1 палки, помогающие сохранять баланс.
Блок контроллеров 12, состоящий из отдельных контроллеров роботов-манипуляторов и видеоконтроллера, передает управляющие сигналы на привода роботов-манипуляторов 6, 8 и руками 5, 7 через соединительные элементы 4 и 10 воздействуют на пользователя 1 перемещением или сопротивлением перемещению платформ 2 с имитаторами лыж 3 и седла 9. Управляющие сигналы формируются замкнутыми системами управления в контроллерах с использованием сигналов датчиков 13, 14, 15, 16, 17, 18 и сигналов, формируемых видеоконтроллером, отражающих ситуацию на воображаемом склоне. Видеоконтроллер одновременно отражает все движения изменениями картинки на экране 11 (или в виртуальном шлеме). Системы натяжения сети (или полотна) 20, состоящие из роликов 21 и натяжителей 22 поддерживают плоскость между площадками 19 и платформами 2 по ходу перемещения последних.
Работа тренажера предусматривает 6 основных режимов:
1) Принудительное перемещение корпуса пользователя 1 посредством руки 7 робота-манипулятора 8, соединенной с седлом 9, относительно условно неподвижных стоп, закрепленных в имитаторах лыж 3. При этом, манипулятор 8, воздействующий на корпус пользователя 1, работает по всем координатам в двигательном режиме. Движения, передаваемые через седло 9 на корпус пользователя 1, синхронизированы с меняющимися поворотами на экране 11.
2) Принудительное перемещение стоп пользователя 1, закрепленных в имитаторах лыж 3, относительно неподвижного корпуса пользователя 1.
Манипуляторы 6, воздействующие на стопы пользователя 1, работают по всем координатам в двигательном режиме.
Движения, передаваемые через имитаторы лыж 3 на стопы пользователя 1, синхронизированы с меняющимися поворотами на экране 11.
3) Создание переменных усилий на корпус пользователя 1 через седло 9, в то время когда пользователь 1 перемещает свой корпус относительно условно неподвижных стоп. Манипулятор 8, воздействующий на корпус пользователя 1 через седло 9, работает по всем координатам в генераторном режиме, поддерживая задаваемые контроллером 12 усилия.
4) Создание переменных усилий на стопы пользователя 1 через платформы 2, в то время когда пользователь 1 перемещает их относительно условно неподвижного корпуса. Манипуляторы 6, воздействующие на стопы пользователя 1, работают по всем координатам в генераторном режиме, поддерживая задаваемые контроллером 12 усилия.
5) Комплексное принудительное перемещение корпуса пользователя 1 седлом 9 и стоп платформами 2 в функции прохождения поворотов. Манипулятор 8, воздействующий на корпус пользователя 1 и манипуляторы 6, воздействующие на стопы пользователя 1 через платформы 2, работают по всем координатам в двигательном режиме, отрабатывая заданные контроллером 12 перемещения.
6) Имитация ощущений, действующих на лыжника при выполнении поворотов, за счет создания переменных усилий на корпус через седло 9 и стопы пользователя 1 через платформы 2, в то время когда пользователь 1 воспроизводит двигательные навыки движениями, как корпуса, так и стоп для прохождения поворотов. Манипуляторы 6 и 8 работают по всем координатам в генераторном режиме, поддерживая задаваемые контроллером 12 усилия.
3-й, 4-й и 6-й режимы создают ощущение пружин переменной жесткости, работающих в допустимом диапазоне.
Для обеспечения безопасности пользователя в 3-ем, 4-ом и 6-ом режимах предусмотрен аварийный переход приводов манипуляторов 6, 8 в двигательный режим с подержанием расчетного положения, если происходят перемещения за допустимые пределы.
Виртуальная среда пользователя 1 может выводиться на экран 11 с дополнительным представлением пользователя 1 или без него.
За счет использования модификаций платформ, седла (трапеции) и программного обеспечения, тренажер можно применять для тренировок других видов спорта, таких как сноуборд, водные лыжи, виндсерфинг и прочих.
Способ тренировки горнолыжников на тренажере осуществляется следующим образом.
Режимы работы тренажера и способ тренировки задает тренер по согласованию с пользователем. Пользователь 1 слышит в наушниках шлема слова тренера, объясняющего какой вид тренировки предстоит.
Тренер дает старт на начало тренировки. Картинка в шлеме (или на экране 11) показывает выезд на склон.
Для осуществления тренировки предусмотрено 6 основных режимов:
1) Корпус пользователя 1 принудительно перемещают посредством руки 7 робота-манипулятора 8, соединенной с седлом 9, относительно условно неподвижных стоп, закрепленных в имитаторах лыж 3. Траектории перемещения корпуса 1 подобны траекториям 23, показанным на фиг. 2 Серая стрелка в траектории перемещения корпуса 23 показывает начало этой траектории (с нулевой фазы ф0) для выполнения очередного поворота. В первой фазе поворота (ф1) корпус пользователя продвигают по отношению к стопам вперед и внутрь (к центру) поворота. Во второй фазе (ф2), продолжая смещать корпус к центру поворота, в поперечном направлении корпус смещают к линии, проходящей через середину стоп, а в третьей, завершающей поворот фазе (ф3), корпус пользователя смещают немного назад и затем к уравновешенному положению посредине стоп (нулевая фаза ф0). Вертикально корпус держат примерно на одном уровне, несколько приподнимая в первой фазе поворота и опуская в третьей. При повороте в другую сторону все движения повторяют зеркально.
2) Стопы пользователя 1, закрепленные в имитаторах лыж 3, принудительно перемещают посредством рук 5 роботов-манипуляторов 6 относительно неподвижного корпуса. Траектории перемещения стоп 24 подобны траекториям, показанным на фиг. 3.
Серая стрелка в траектории перемещения стоп 24 показывает начало этой траектории (с нулевой фазы ф0) для выполнения очередного поворота.
Движения стоп, относительно корпуса также осуществляют по траектории перечной 8-ки, только в противоположном направлении. Вначале стопы перемещают назад с отставанием от корпуса для занятия передней стойки в первой фазе поворота (ф1) и наружу от центра поворота, при этом лыжи оказываются поставленными на канты. Во второй фазе (ф2) стопы, находящиеся снаружи от корпуса, перемещают вперед на одну линию с корпусом в поперечном направлении. В третьей фазе (ф3) стопы перемещают с небольшим опережением корпуса в поперечном направлении и следом перемещают под корпус в короткой нулевой фазе (ф0) перед первой фазой (ф1) поворота в другую сторону.
3) Рукой 7 робота-манипулятора 8 создают переменные усилия на корпус пользователя 1 через седло 9, аналогичные усилиям, действующим на горнолыжника на реальной трассе, в то время как пользователь перемещает свой корпус, имитируя повороты, относительно условно неподвижных стоп. Траектории перемещения корпуса 23 должны быть подобны траекториям, показанным на фиг. 2.
В первой фазе поворота (ф1) пользователь продвигает корпус вперед по отношению к стопам и к центру поворота. Во второй фазе (ф2), пользователь продолжает смещать корпус к центру поворота, а в поперечном направлении смещает его назад к линии, проходящей через середину стоп. В третьей, завершающей поворот фазе (ф3), пользователь смещает корпус немного назад и затем смещает его к уравновешенному положению посредине стоп (нулевая фаза ф0). Вертикально пользователь держит корпус примерно на одном уровне, несколько приподнимаясь в первой фазе поворота и опускаясь в третьей. При повороте в другую сторону все движения пользователь повторяет зеркально.
Посредством руки 7 робота-манипулятора 8 имитируют усилия, действующие на горнолыжника, выполняющего поворот в реальных условиях.
4) Пользователь 1 перемещает стопы относительно условно неподвижного корпуса. Траектории перемещения стоп 24 должны быть подобны траекториям, показанным на фиг. 3.
Вначале пользователь перемещает стопы назад по отношению к корпусу и наружу от центра поворота для занятия передней стойки в первой фазе поворота (ф1), при этом лыжи оказываются поставленными на канты. Во второй фазе (ф2) пользователь перемещает стопы, находящиеся снаружи от корпуса, вперед к линии корпуса в поперечном направлении. В третьей фазе (ф3) пользователь перемещает стопы немного вперед, опережая корпус в поперечном направлении и следом затем под корпус в короткой нулевой фазе (ф0) перед первой фазой (ф1) поворота в другую сторону. Посредством рук 5 роботов-манипуляторов 6 через платформы 2 и имитаторы лыж 3 создают усилия на стопы пользователя, соответствующие каждой фазе поворота, тем самым имитируют ощущения, действующие на горнолыжника, выполняющего поворот в реальных условиях.
5) Принудительно перемещают корпус пользователя 1 седлом 9 путем воздействия на него руки 7 робота-манипулятора 8. Одновременно стопы пользователя на имитаторах лыж 3 платформами 2 перемещают принудительно путем воздействия на них руками 5 роботов-манипуляторов 6 в функции прохождения поворотов, демонстрируемых на экране. Траектории принудительных перемещений корпуса и стоп подобны траекториям 23 и 24 на фиг. 4
В первой фазе поворота (ф1) корпус пользователя по траектории 23 перемещают по отношению к стопам вперед и к центру поворота. А стопы по траектории 24 перемещают назад по отношению к корпусу и наружу от центра поворота.
Во второй фазе (ф2), продолжая перемещать корпус к центру поворота, в поперечном направлении смещают его несколько назад. А стопы, находящиеся снаружи от корпуса, перемещают вперед, догоняя линию корпуса в поперечном направлении.
В третьей, завершающей поворот фазе (ф3), корпус перемещают немного назад и затем к уравновешенному положению посредине стоп (нулевая фаза ф0). А стопы перемещают немного вперед, опережая корпус в поперечном направлении и затем перемещают под корпус в короткой нулевой фазе (ф0) перед первой фазой (ф1) поворота в другую сторону.
6) Пользователь воспроизводит двигательные навыки для прохождения поворотов, выполняя движения, как корпуса, так и стоп в соответствии с демонстрацией на экране. Траектории движения корпуса 23 и стоп 24 должны быть подобны траекториям, показанным на фиг. 4.
В первой фазе поворота (ф1) пользователь перемещает корпус по отношению к стопам по траектории 23 вперед и к центру поворота, а стопы перемещает по траектории 24 назад и наружу от центра поворота. Во второй фазе (ф2), продолжая перемещать корпус к центру поворота, в поперечном направлении перемещает его несколько назад. А стопы, находящиеся снаружи от корпуса, пользователь перемещает вперед к линии корпуса в поперечном направлении.
В третьей, завершающей поворот фазе (ф3), пользователь перемещает корпус немного назад и затем от центра поворота к уравновешенному положению посредине стоп (нулевая фаза ф0). А стопы перемещает немного вперед, опережая ими корпус в поперечном направлении, и затем под корпус в короткой нулевой фазе (ф0) перед первой фазой поворота в другую сторону.
Рукой 7 робота-манипулятора 8 создают переменные усилия на корпус пользователя 1 через седло 9. Руками 5 роботов-манипуляторов 6 через имитаторы лыж 3 и платформы 2 создают переменные усилия на стопы пользователя. Тем самым имитируют ощущения, действующие на горнолыжника, выполняющего поворот в реальных условиях. Начальные тренировки проводят на условно пологом склоне. Задают небольшую скорость и диапазон движений (развод поворотных древков небольшой), медленный темп.
После закрепления навыков в медленном темпе, темп движений увеличивают. Увеличивают крутизну виртуального склона. Увеличивают развод поворотных древков, а значит, увеличивают диапазон движений. Постепенно переходят к самым крутым экстремальным трассам и к тренировкам на максимальных скоростях. Условно трасса может быть бесконечной - для многократного повторения необходимых движений и, в конце концов, для выработки и закрепления профессиональных навыков выполнения поворотов.
Преимущества предлагаемого тренажера для горнолыжников и способа тренировки на нем:
- за счет многократных повторений вырабатывает мышечную память правильных движений корпуса и ног при выполнении горнолыжных поворотов, (закрепление навыков),
- дает возможность начинать отработку движений в замедленном темпе,
- приучает к правильным движениям вначале принудительно за счет приводов, а затем отслеживая правильные движения пользователя,
- дает пользователю возможность ощущать воздействия сил, изменяемых по ходу каждого поворота (в том числе позволяющих сохранять баланс),
- обеспечивает максимальную безопасность во время тренировок.
Пользователь на данном тренажере получает навыки практически полностью идентичные тренировкам на реальных склонах при этом безопасно. Тренировки могут проходить круглогодично независимо от сезона.