Результат интеллектуальной деятельности: Система для измерения деформаций и способ измерения деформаций
Вид РИД
Изобретение
Целью данного изобретения является система измерения деформаций и способ измерения деформаций. Система и способ предназначены, в частности, для измерения деформаций конструктивных элементов зданий, в частности, больших складов, крупноразмерных конструкций, многоэтажных построек и зданий, мостов, виадуков и крыш.
Известное состояние техники
В заявке US 9261355B2 раскрывается устройство для измерения кривизны лопасти ротора ветряной электростанции оптическим методом. Лопасть ротора, установленная на основании лопасти, закрепляется на ступице ротора или роторе. Устройство содержит по меньшей мере одну внешнюю излучающую метку, закрепленную на лопасти ротора на некотором расстоянии от основания лопасти, по меньшей мере одна камера закрепляется на роторе для захвата излучения, испускаемого внешней меткой. Устройство позволяет получить информацию о первом положении в зависимости от положения камеры относительно внешней метки. Измерительное устройство соединено с камерой, а устройство определения положения определяет положение камеры относительно основания лопасти и выдает вторую часть информации о положении как функцию от упомянутого относительного положения. При анализе информации о положении измерительное устройство определяет по меньшей мере одну переменную, характеризующую кривизну лопасти ротора.
Вышеупомянутое техническое решение не используется для измерения больших конструкций, таких как мосты или крыши зданий. Более того, необходимо знать положение камеры относительно наблюдаемой метки.
В заявке CN 106225708A раскрывается оптическая система измерения деформаций, нечувствительная к окружающему излучению. В целом система измерения деформаций состоит из черно-белой промышленной видеокамеры, объектива с фиксированным фокусным расстоянием, электронного теодолита, дальномера, штатива, метки в виде монохроматического сверхъяркого светодиода, полосового фильтра с узкой полосой пропускания, соответствующей длине волны источника излучения, и компьютера. Метка в виде монохроматического светодиода устанавливается в контролируемой точке. Датчик потока излучения с узкополосным фильтром, устанавливаемым на объективе, используется для записи видеоизображения светодиодной метки в реальном времени. Данные получаются в реальном времени с помощью алгоритма трассировки изображения, основанном на подстройке корреляции яркости изображения или выделении характерных точек. Вся система измерения деформаций нечувствительна к изменению внешней освещенности; благодаря этому возможно выполнять точное измерение смещения или изгиба в условиях дня и ночи; возможен расчет множества положений объекта на одном изображении и выполнение динамических измерений смещения или изгиба в реальном времени для множества обнаруженных точек.
Вышеуказанное техническое решение позволяет измерить только смещение точек: используя точечный источник, невозможно определить поворот цели. Помимо камеры и цели, излучающей монохроматическое излучение, для работы системы необходимо множество дополнительных устройств, таких как фильтры и дальномеры.
Краткое описание изобретения
Целью данного изобретения является система и способ измерения деформаций, не имеющие вышеупомянутых недостатков. Система и способ по данному изобретению представляет собой более простую систему и способ, предназначенные для измерения смещений и поворотов меток, закрепленных на контролируемых и/или исследуемых конструктивных элементах зданий.
Система измерения деформаций по меньшей мере одного элемента по меньшей мере одной исследуемой конструкции включает в себя по меньшей мере одну метку, жестко закрепленную на элементе исследуемой конструкции, по меньшей мере одно приемное устройство, настроенное и запрограммированное для записи в цифровом виде данных, связанных с положением метки. Кроме этого, система имеет блок обработки, настроенный и запрограммированный для обработки данных, связанных с положением метки, соединенный по линии связи с приемным устройством, предпочтительно через приемный блок. Система отличается тем, что метка включает в себя по меньшей мере десять светоизлучающих характерных точек.
Система предпочтительно имеет светоизлучающие характерные точки в виде точечного или распределенного источника излучения.
Наименьший размер светоизлучающей характерных точек составляет преимущественно более 3 мм, предпочтительно 5 мм, и наиболее предпочтительно 11 мм. В зависимости от расстояния работы размер характерных точек должен быть разным: чем дальше метка от приемного устройства, тем больше должна быть характерная точка.
Метка содержит предпочтительно по меньшей мере четырнадцать характерных точек, и наиболее предпочтительно по меньшей мене двадцать семь характерных точек.
Характерные точки системы предпочтительно образуют асимметричную фигуру.
Система предпочтительно содержит приемное устройство, имеющее координатный датчик изображения и оптическую систему, при этом угол между оптической осью оптической системы и нормалью к плоскости, задаваемой тремя характерными точками метки, расположенной ближе всего к приемному устройству, составляет более 7° и менее 75°, предпочтительно менее 40°.
Система предпочтительно содержит не менее двух меток, имеющих по меньшей мере два различных расположения характерных точек, каждая метка имеет предпочтительно уникальное расположение характерных точек, отличающееся от расположения характерных точек в других метках.
В системе характерные точки метки предпочтительно регулируются для возможности их контроля, в частности, включаются и выключаются при помощи приемного блока или блока обработки, этот приемный блок или блок обработки соединены с меткой по каналу связи.
Система предпочтительно имеет приемное устройство, оснащенное оптической системой с фиксированным фокусным расстоянием.
Система предпочтительно имеет приемное устройство, подключенное к приемному блоку или блоку обработки с помощью линии связи передачи данных.
Система предпочтительно содержит по меньшей мере один приемный блок и по меньшей мере одно оконечное устройство, приемный блок и/или оконечное устройство соединены с блоком обработки по линии связи передачи данных.
Изобретение также включает в себя способ измерения деформаций исследуемой конструкции, реализуемый в системе, включающей в себя по меньшей мере одну метку, жестко закрепленную на элементе исследуемой конструкции, по меньшей мере одно приемное устройство, настроенное и запрограммированное для записи данных, связанных с положением метки в цифровом виде, блок обработки, настроенный и запрограммированный для обработки данных, связанных с положением метки, соединенной по каналу связи с приемным устройством, предпочтительно через приемный блок. Способ включает в себя следующие этапы:
а) запись и предпочтительно первичная обработка данных, связанных с положением метки, приемным устройством в цифровом виде,
б) передача этих цифровых данных на блок обработки, предпочтительно при помощи приемного блока, который преимущественно сжимает полученные цифровые данные пред их передачей на блок обработки.
Данный способ отличается тем, что используется метка, содержащая по меньшей мере десять светоизлучающих характерных точек, и зная эталонную модель характерных точек и зная эталонное положение центра метки и эталонный поворот метки,
в) по виртуальному повороту определяется поворот и положение центра метки и выполняется подстройка эталонной модели характерных точек метки к цифровым данным,
г) смещение и поворот метки определяются путем сравнения поворота и положения центра метки, определенного на этапе в), с эталонным положением центра метки и эталонным поворотом метки.
Во время использования данного способа, перед первым измерением предпочтительно выполняется калибровка, в течение которой, на основании записанных цифровых данных, определяющих положения и повороты метки, определяется по меньшей мере один параметр, описывающий деформацию изображения оптической системой приемного устройства, и этот параметр используется во время измерений для корректировки записанных цифровых данных.
Способ предпочтительно реализуется в виде сетевой архитектуры, где приемное устройство, приемный блок и блок обработки работают согласно архитектуре сервер-клиент-сервер, при этом приемное устройство и блок обработки являются серверами, а приемный блок - клиентом, где приемный блок, на основании предварительно определенных параметров, периодически подает команды на передачу данных по меньшей мере от одного приемного устройства, и, приняв данные, передает их на блок обработки.
В реализации данного способа координатный датчик изображения, оснащенный оптической системой, предпочтительно используется как приемное устройство, и используется метка, содержащая по меньшей мере десять характерных точек; приемное устройство и метка расположены и установлены относительно друг друга таким образом, что угол между оптической осью оптической системы и нормалью к плоскости, задаваемой тремя характерными точками метки, расположенной ближе всего к приемному устройству, составляет более 7° и менее 75°, предпочтительно менее 40°.
Предпочтительное осуществление изобретения
Далее изобретение будет представлено более подробно на примере предпочтительных осуществлений, с ссылками на прилагаемые рисунки, где:
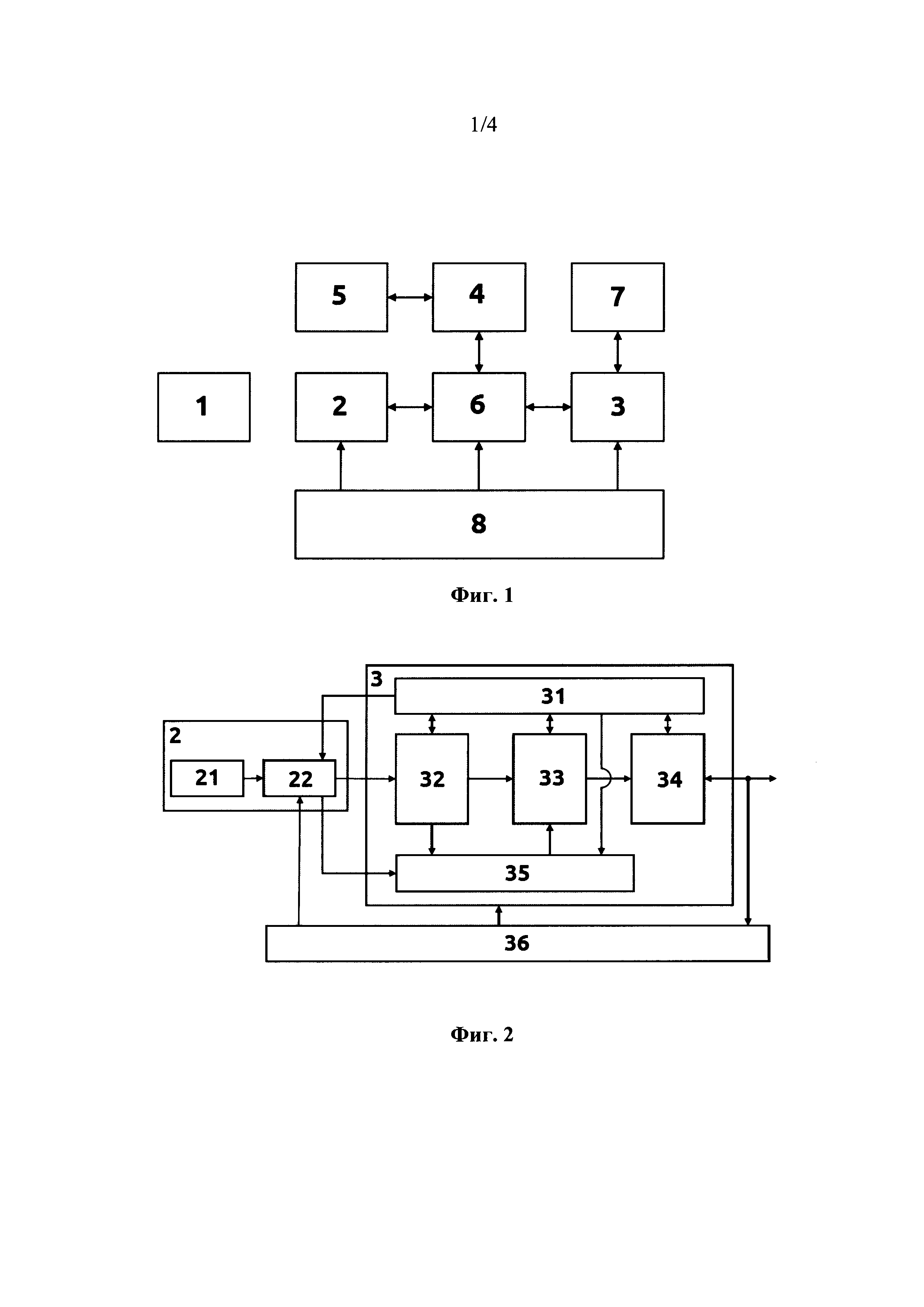
на ФИГ. 1 показана блок-схема измерительной системы исследования деформаций;
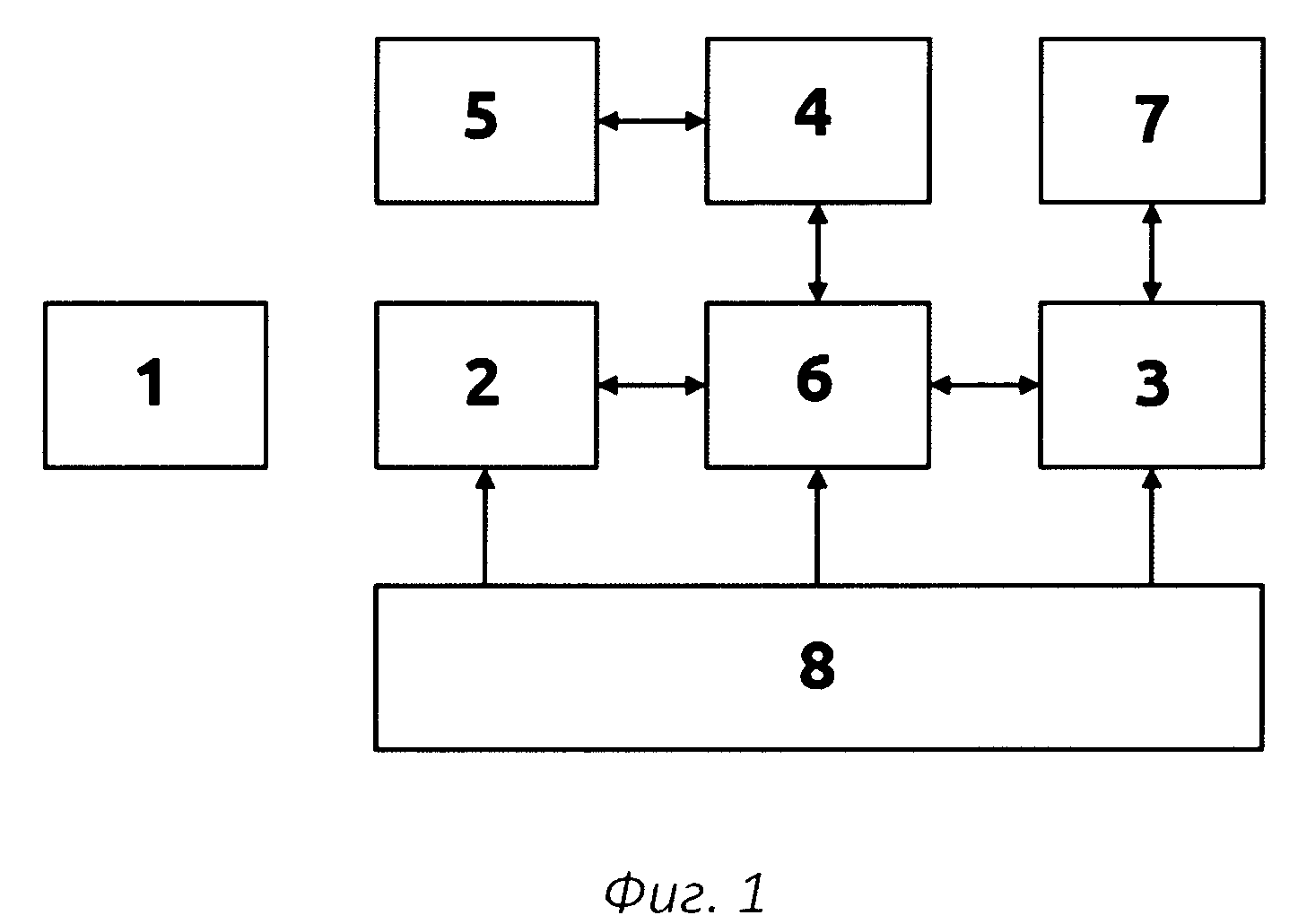
на ФИГ. 2 показана блок-схема оптического приемного устройства для исследования деформаций, способного анализировать записанные данные;
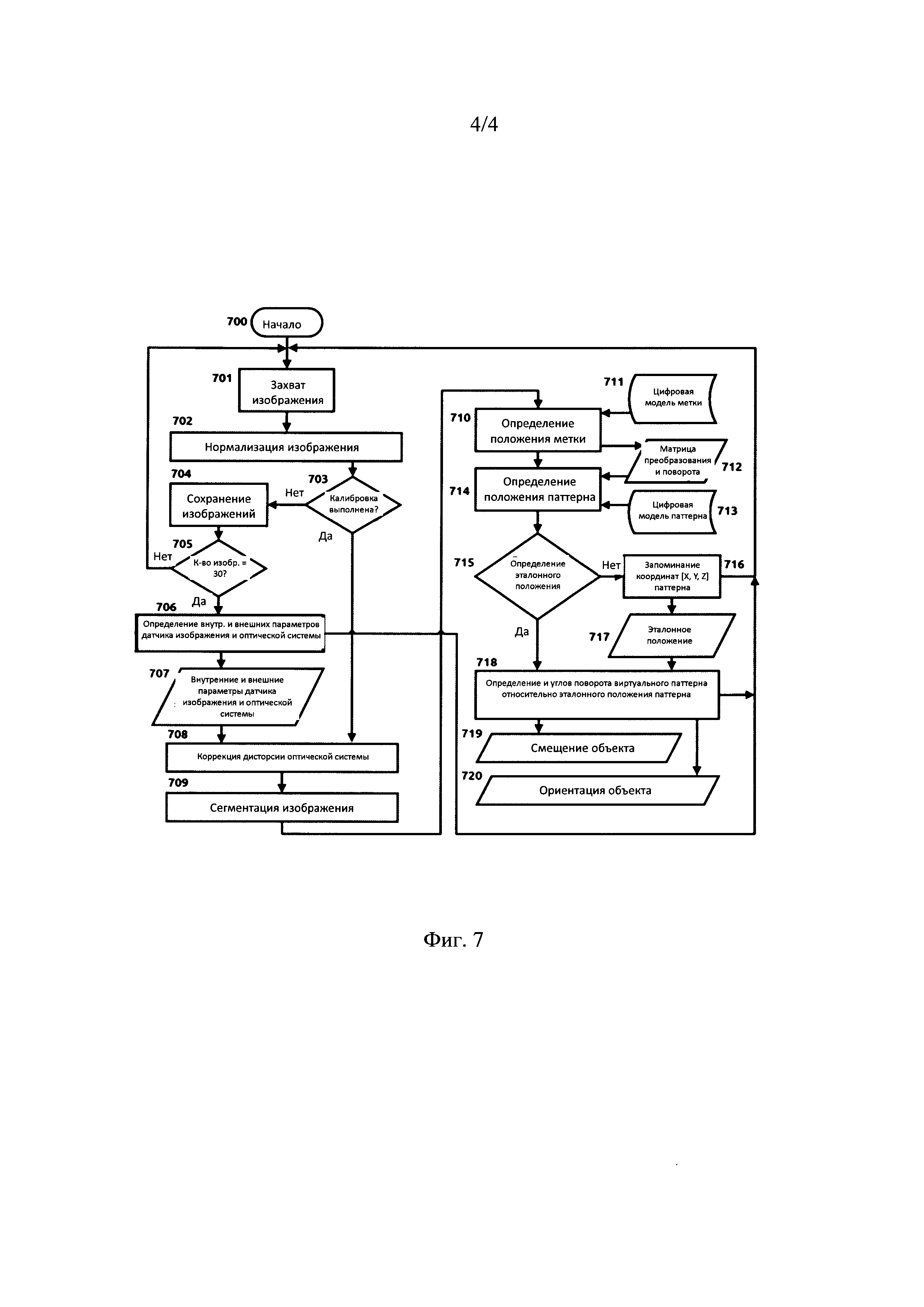
на ФИГ. 3 показан предпочтительный пример ориентации метки относительно оптической оси приемного устройства;
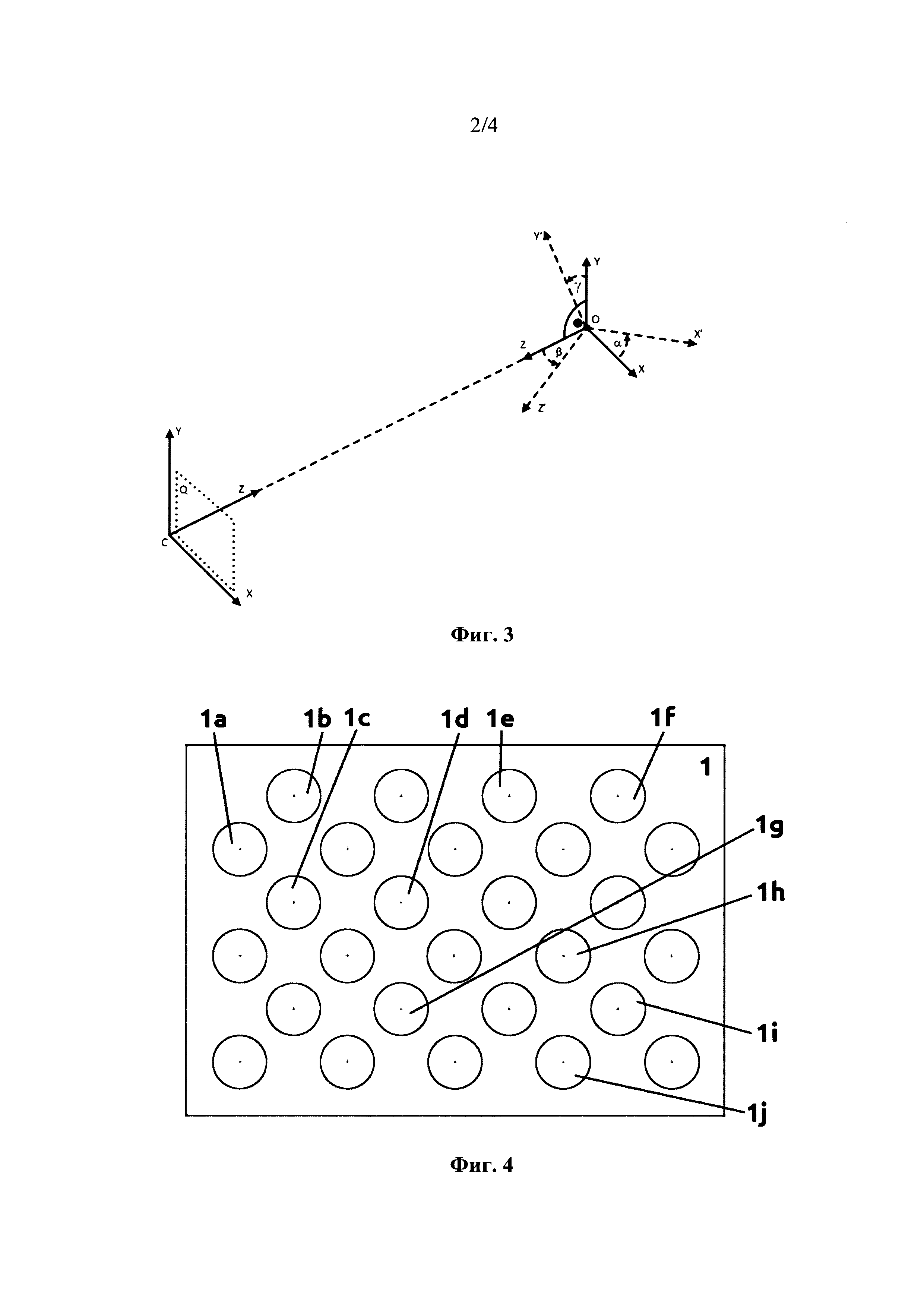
на ФИГ. 4 показан пример метки с видимыми светодиодами, которые могут использоваться в качестве характерных точек;
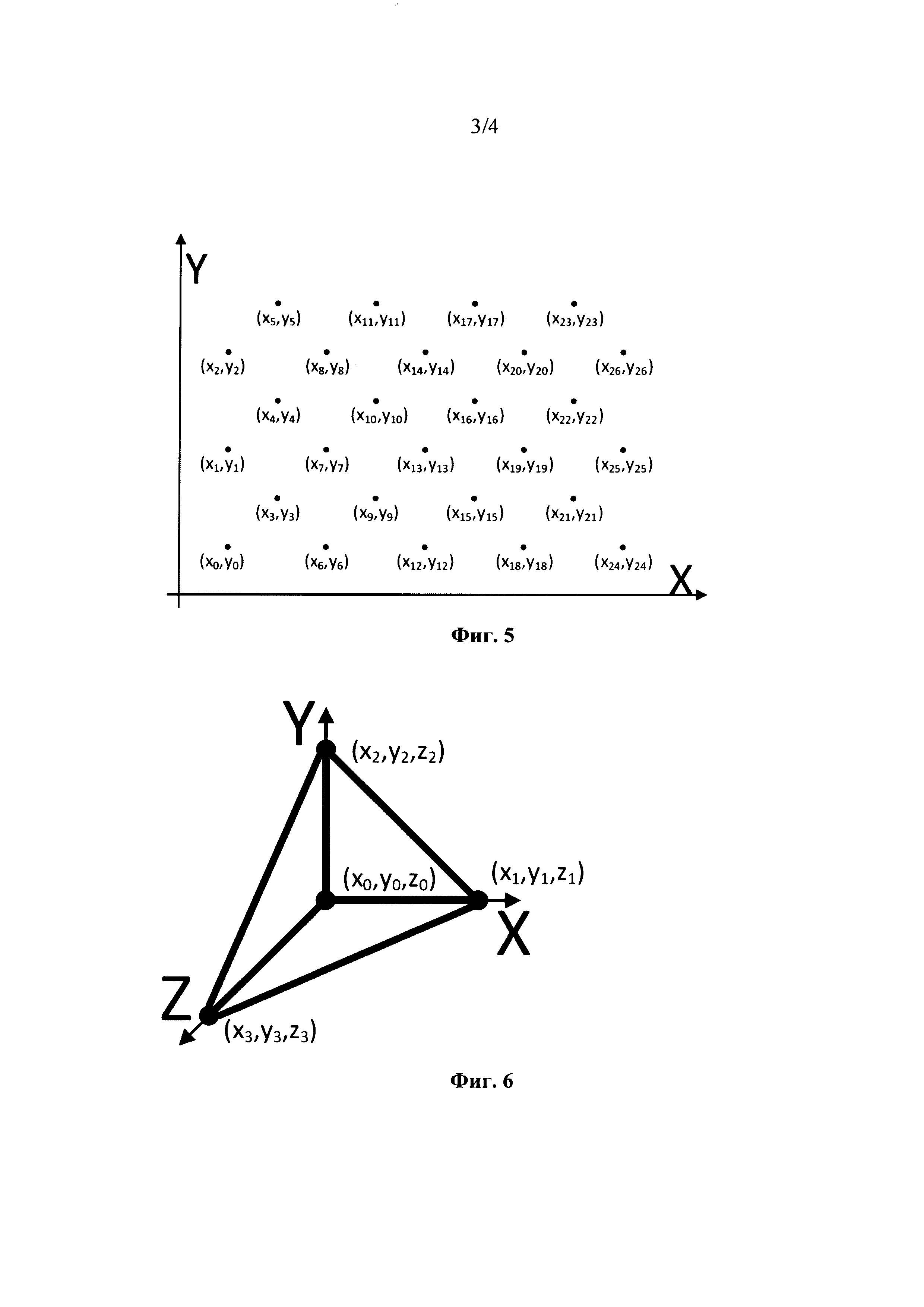
на ФИГ. 5 показаны примеры меток в виде источников излучения, используемых для определения положения;
на ФИГ. 6 показан пример виртуальной метки, используемой на дальнейших этапах определения деформаций элементов конструкции;
на ФИГ. 7 показана блок-схема осуществления способа в соответствии с изобретением.
Система для измерения деформаций представлена в двух основных осуществлениях. В первом осуществлении, показанном на ФИГ. 1, измерительная система была реализована в виде измерительной системы, в которой каждый функциональный элемент - это отдельный физический элемент. Во втором осуществлении, показанном на ФИГ. 2, изобретение было реализовано в виде оптического приемного устройства, в котором функциональные блоки являются частью одного устройства. Следует отметить, что возможны также промежуточные технические решения, не описанные здесь.
В первом осуществлении, показанном на ФИГ. 1, отдельные элементы измерительной системы - это отдельные физические элементы. В этом осуществлении измерительная система содержит по меньшей мере одну метку 1, положение которой регистрируется по меньшей мере одним приемным устройством 2. Следует отметить, что также возможна регистрация одним приемным устройством 2 двух и более меток 1. В предпочтительном варианте осуществления одно приемное устройство 2 наблюдает одну метку 1. Данные, записанные приемными устройствами 2, передаются в форме цифровых данных на блок 4 обработки, который впоследствии преобразует данные, зарегистрированные приемным устройством 2, в информацию, содержащую сведения о смещении и повороте метки 1. Данные от приемного устройства 2 могут передаваться непосредственно на приемный блок 3 или при помощи него. Данный блок в этом варианте осуществления дополнительно оснащен блоком 7 управления меткой, который управляет метками 1.
В вышеуказанном варианте осуществления приемное устройство 2, приемный блок 3, блок 4 обработки соединены друг с другом при помощи локальной компьютерной сети 6, через которую одновременно производится питание этих элементов (технология РоЕ - Power over Ethernet). Питание обеспечивается от блока 8 распределения мощности.
Результаты обработки данных могут передаваться из блока 4 обработки на оконечное устройство 5.
В другом варианте осуществления приемное устройство 2, приемный блок 3 и блок 4 обработки работают в конфигурации сервер-клиент-сервер, где приемное устройство 2 и блок 4 обработки выполняют функцию сервера, в то время как приемный блок 3 выполняет функцию клиента. В данной реализации, приемное устройство 2 и блок 4 обработки ожидают информацию или команды от приемного блока 3. Приемное устройство 2 передает данные о положении метки 1 только после получения соответствующих команд от приемного блока 3. При получении данных от приемных устройств 2, приемный блок 3 передает собранные данные на блок 4 обработки. Данные от приемных устройств 2 могут быть сжаты при помощи приемного блока 3, который позволяет передавать меньшее количество данных.
Конфигурация сервер-клиент-сервер позволяет получать данные от множества приемных устройств 2. Кроме того, такое техническое решение повышает безопасность системы - в этой конфигурации приемный блок 3 не получает никаких инструкций, что усложняет получение удаленного контроля над системой.
В другом варианте осуществления приемное устройство 2 подключено к приемному блоку 3 или блоку 4 обработки с помощью линии связи для передачи данных.
Еще в одном варианте осуществления, в котором система содержит по меньшей мере один приемный блок 3 и по меньшей мере одно оконечное устройство 5, приемный блок 3 и/или оконечное устройство 5 соединены с блоком 4 обработки по линии связи для передачи данных.
На ФИГ. 2 показано оптическое устройство для измерения деформаций структурного элемента путем наблюдения метки 1 (не показана на ФИГ. 2). Оптическое приемное устройство для определения линейных и угловых смещений включает в себя приемное устройство 2, состоящее из оптической системы 21, предпочтительно с фиксированным фокусным расстоянием, и координатного датчика 22 изображения, и блок 3 обработки в виде миниатюрного цифрового компьютера, выполняющего функции блока 32 преобразования цифрового сигнала, блока 33 сжатия данных, интерфейса 34 передачи данных, блока 35 диагностики, блока 31 удаленного пользовательского интерфейса и блока 36 распределения мощности. Координатный датчик 22 изображения подключен к блоку 3 обработки, в котором блок 32 обработки цифровых сигналов обрабатывает полученные данные. Информация о смещении объекта и эйлеровых углах, определенных в блоке 32 обработки цифровых сигналов, сжимается в блоке 33 сжатия данных и передается на оконечное устройство 5 (не показано на ФИГ. 2), представляющее собой хост-компьютер, при помощи интерфейса 34 передачи данных.
ПЗС, КМОП, n-МОП (live-MOS) матрицы являются примерами координатного датчика 22 изображения. Также возможно использование любых других датчиков, позволяющих регистрировать информацию о положении метки.
Следует отметить, что оптическая система 21 может быть предварительно собранным узлом из оптических компонентов, таких как линзы, отъюстированные для конкретных условий измерения, а также может быть в виде готового объектива, например, для цифровых камер, или оптических устройств, соединенных с координатным датчиком 22 изображения.
Следует отметить, что также возможен вариант, когда миниатюрный компьютер выполняет функцию оконечного устройства 5. В этом случае в оптическом устройстве присутствует дополнительный интерфейс, позволяющий выводить преобразованные данные.
В вариантах осуществления изобретения, измерение выполняется при неподвижно закрепленных на элементах исследуемой структуры метках, деформация которых измеряется. На ФИГ. 4 показан пример светоизлучающей метки. Метка содержит светоизлучающие диоды, расположенные вряд. Во время работы есть возможность включить излучатели только на время измерения. Такое техническое решение сэкономит электрическую энергию, затрачиваемую во время проведения измерений, и позволит легко найти метку на изображении, когда она загорится, благодаря чему при помощи компьютера ее будет легко обнаружить. В примере метки также возможно зажечь только некоторые источники света, которые позволят, при той же конструкции меток, получить уникальное расположение, что сделает возможным однозначно идентифицировать наблюдаемые метки. Следует отметить, что характерные точки метки 1 должны быть легко различимы среди всех получаемых данных. Это особенно важно, когда одно приемное устройство 2 регистрирует данные, относящиеся к положению двух и более меток 1.
В предпочтительном варианте осуществления метка 1 получает команды о зажигании характерных точек (включение и выключение, а также особые способы зажигания) от приемного блока 3 или блока 4 обработки. В такой конфигурации метка 1 и приемный блок 3 или блок 4 обработки соединены друг с другом по каналу связи, предпочтительно беспроводному.
Во время последних шагов анализа измерительная система работает не с отдельными источниками света, а с их конкретным виртуальным эквивалентом. Вот почему предпочтительно, чтобы метка содержала характерные точки, которые предпочтительно включаются. Это значит, что с точки зрения обработки изображения наблюдаемое изображение в дальнейшем может анализироваться легче. Этими характерными точками могут быть отдельные источники света, углы контура, формируемого множеством источников света, границы или углы световых областей и т.д. Также предпочтительно, чтобы самый малый размер характерных точек был не менее 11 мм. Во время разработки изобретения было замечено, что светящиеся точки с меньшим диаметром не позволяют производить измерения при расстоянии более 50 м. Благодаря увеличению размера светящихся точек возможно выполнять измерения на  дистанциях, так как точки отчетливо видны приемному устройству 2. К тому же во время измерений на меньших расстояниях светящаяся точка большего размера облегчает определение ее положения благодаря большему количеству данных о положении точки, получаемых приемным устройством 2, что увеличивает точность определения положения характерных точек.
дистанциях, так как точки отчетливо видны приемному устройству 2. К тому же во время измерений на меньших расстояниях светящаяся точка большего размера облегчает определение ее положения благодаря большему количеству данных о положении точки, получаемых приемным устройством 2, что увеличивает точность определения положения характерных точек.
Однако стоит отметить, что размер характерных точек предпочтительно может быть меньше, в зависимости от расстояния между меткой 1 и приемным устройством 2 и от используемой оптической системы 21. В некоторых областях применения характерная точка размером 3 мм была зарегистрирована при помощи приемного устройства 2, при этом размер характерных точек был оптимальным, в особенности для малых дистанций между приемным устройством 2 и меткой 1, когда расстояние достигало порядка десятка метров. Для расстояний до приблизительно 50 метров характерные точки были преимущественно больше и имели размер 5 мм. Для расстояний больше 50 м размер характерны точек преимущественно больше и достигает 11 мм. Следует отметить, что данные размеры приводятся в качестве примера, они использовались при разработке изобретения, и специалисту в данной области техники будет понятно, когда нужно использовать характерные точки большего или меньшего размера.
В другом варианте осуществления характерные точки системы образуют асимметричную фигуру. В связи с этим становится возможным однозначно определить положение и углы поворота метки. К тому же в случае использования в измерительной системе более чем одной метки 1, предпочтительно используются по меньшей мере два расположения характерных точек. Более предпочтительно, чтобы каждая метка имела разное расположение характерных точек.
Еще в одном варианте осуществления угол между оптической системой 21 приемного устройства 2 и нормалью к плоскости, заданной тремя характерными точками метки 1 ближайшей к приемному устройству 2, составляет более 7° и менее 75°, предпочтительно менее 40°. Такая ориентация марки 1 относительно приемного устройства 2 позволяет уменьшить погрешности измерительной системы. Это связано с тем, что не допускается положение метки 1, при котором ось Z метки 1 направлена перпендикулярно плоскости координатного датчика изображения. При каждом измерении из-за шума возникает погрешность измерений или даже отклонение в плюс-минус несколько градусов, в зависимости от параметров системы. Когда угол наклона мал, то есть имеет значение близкое к 0°, шум приводит к тому, что считываются положительные и отрицательные значения углов. Шум должен одинаково часто приводить к завышенным и заниженным результатам; однако при измерениях, выполняемых в течение длительных временных интервалов порядка 30 минут, будет сложно наблюдать влияние шума на измерение из-за действительных деформаций измеряемого элемента. Также при углах наклона метки 1 поворот метки 1 более заметен, что особенно важно, когда при помощи приемных устройств 2 о положении метки 1 собирают меньшее количество данных.
На ФИГ. 3 схематично показаны ориентации метки 1 относительно приемного устройства 2. Плоскость приемного устройства 2 обозначена Q, при этом ось Z является осью оптической системы приемного устройства 2. Координаты с центром в точке О связаны с меткой 1. В случае, когда метка будет расположена абсолютно перпендикулярно к оптической системе приемного устройства 2, она будет описываться с использованием координат XYZ, показанных сплошной линией.
Следует отметить, что изобретение может быть также выполнено с использованием меток, которые не излучают свет. С таким типом меток круглосуточные измерения становятся невозможны без дополнительной подсветки. Также данный вариант осуществления представляет собой техническое решение, в котором используется видимое излучение. Следует отметить, что используемый спектр излучения является произвольным, при условии, что возможно определить положения источников излучения.
На ФИГ. 4 показан пример метки 1 с двадцатью семью точечными источниками света. Каждый из этих точечных источников может включаться и выключаться, что позволяет установить требуемое число характерных точек и задать им соответствующее расположение. В одном варианте осуществления активны источники света 1а-1, то есть светоизлучатели, далее они принимаются за характерные точки. Следует также отметить, что включаться могут все источники света или только некоторые из них, выбранные произвольным образом, что позволяет получить достаточно данных для определения положения и поворота метки 1. Необходимо, чтобы метка 1 имела по меньшей мере десять характерных точек, предпочтительно по меньшей мере четырнадцать, а более предпочтительно по меньшей мере двадцать семь.
Калибровка оптоэлектронного приемного устройства (камеры), равно как и последующий поиск значения смещения и ориентации объекта, могут быть выполнены с использованием метки в виде шахматной доски или в виде асимметричной сетки из окружностей. В данном варианте осуществления используется асимметричная сетка из окружностей, так как она дает лучшее качество получаемых результатов и обеспечивает лучшую стабильность получаемых результатов при последующих вызовах функции расчета. Поиск положений характерных точек плоской метки на изображении выполняется путем решения задачи типа Perspective N-Point, то есть с использованием итерационного способа, основанного на оптимизации Левенберга-Марквардта и томографическом описании. Томографическая матрица, используемая в этом описании, имеет размер 3×3, что требует наличия не менее четырех точек для ее решения. Следует отметить, что передача большего числа точек положительно сказывается на минимизации погрешности репроецирования. С точки зрения дальнейшей обработки данных, в преобразованном изображении имеет значение только положение центров окружностей. Их количество косвенно определяет количество неизвестных, значение которых могут быть найдены. В данном варианте осуществления есть четыре параметра, связанных с внутренней матрицей координатного датчика изображения (fx, fy, сх, су) и пять или более параметров, относящихся к деформациям, включая три радиальных параметра и два тангенциальных (в сумме по меньшей мере девять параметров). С помощью них может быть определено действительное положение метки. При условии, что N - количество характерных точек, а K - количество изображений метки, можно заметить, что для N=10 и K=1 можно определить 2*10*1=20 ограничений. Допуская, что оптическая система не вносит каких-либо деформаций, могут быть определены четыре внутренних и шесть внешних параметров. Это значит, что для поиска решения необходимо обеспечить такое количество характерных точек, которое бы удовлетворяло неравенству 2NK≥6K+4. В случае, когда K=1, наименьшее возможное N, при котором возможно генерировать регулярный асимметричный паттерн достигает N=10, что дает 2*10*1≥6*1+4, следовательно, 20>10.
На ФИГ. 5 показаны эталонные положения характерных точек, которые может иметь метка 1. Приемное устройство 2 передает данные о положении и ориентации метки 1 на блок 4 обработки. На основании эталонных положений характерных точек и информации о характерных точках, используемой меткой 1, блок 4 обработки определяет положение характерных точек в виде координат. Стоит отметить, что полученные данные, связанные с положением метки 1, требуют преобразований, то есть определения поворота и положения метки 1. Следует также отметить, что при наличии плоского изображения метки и информации о наблюдаемом элементе, специалист в данной области техники может определить пространственную ориентацию и положение путем решения задачи типа Perspective N-Point. Подробности данного вопроса не будут далее обсуждаться в рамках этой заявки.
После извлечения из данных характерных точек их центров в виде координат, становится возможным ограничить количество данных, необходимых для дальнейшей работы. Дальнейшее ограничение количества данных связано с преобразованием положения характерных точек в виртуальный паттерн, представленный на ФИГ. 6.
Виртуальный паттерн содержит информацию, связанную с положением и поворотом метки 1. Информация в этой форме используется в дальнейшем анализе. Сравнивая текущий виртуальный паттерн с эталонным виртуальным паттерном возможно определить изменение положения и ориентации метки 1 и, как следствие, изменение положения и поворот исследуемого структурного элемента.
При первой активации и конфигурации измерительной системы выполняется эталонное измерение. В этом случае первые зарегистрированные данные, связанные с положением метки 1, считаются эталонными, относительно них рассчитываются смещения и повороты. Также перед первым измерением выполняется анализ оптической системы 21 и определяются деформации, вносимые оптической системой 21. При определении типа и интенсивности деформаций определяется по меньшей мере один параметр, который позволит скорректировать данные, полученные датчиком 22.
На ФИГ. 7 показан предпочтительный вариант осуществления способа в соответствии с данным изобретением. При активации системы выполняется шаг "начало" 700, шаг 701 захвата изображения приемным устройством 2. Далее на шаге 702 выполняется нормализация изображения, во время которой выполняется корректировка яркости и цвета зарегистрированного изображения. Далее на шаге 703 проверяется, выполнялась ли калибровка системы. Если не выполнялась, изображение сохраняется в память на шаге 704. Далее проверяется, хранится ли в памяти заданное заранее количество изображений; в данном варианте осуществления шаг 705 допускает захват 30 изображений. Если в памяти хранится меньшее количество изображений, происходит возврат на шаг 701. В случае, если количество изображений достаточно, на шаге 706 происходит определение внутренних и внешних параметров 707, относящихся к приемному устройству 2, более конкретно - к оптической системе 21 и координатному датчику 22 изображения. При определении параметров 707 параметры сохраняются и используются во время измерений.
В случае захвата последующих изображений, шаг 701, при известных параметрах 707, выполняется нормализация, шаг 702, и при удостоверении того, что калибровка уже выполнялась, шаг 703, выполняется коррекция оптической дисторсии, шаг 708.
Следующий шаг - сегментирование изображения, шаг 709. На этом шаге, важные с точки зрения дальнейшей обработки данных элементы извлекаются из полученных данных - метки и характерные точки. Далее, положение метки определяется на шаге 710. К этому моменту собираются данные, связанные с цифровой моделью метки 711, и решается задача Perspective N-Point, что приводит к подстройке модели метки к данным, полученным из изображения и определение матриц 712 преобразования и поворота.
Далее на шаге 714, когда определенны матрицы 712 преобразования и поворота и задана цифровая модель 713 паттерна, определяется положение и ориентация виртуального паттерна в плоскости изображения.
На шаге 715 проверяется, определено ли эталонное положение. Если нет, выполняется шаг 716 запоминания координат и ориентации паттерна и переход к шагу 701 захвата изображения. Если на шаге 715 определяется, что эталонное положение известно, то выполняется шаг 718 определения смещения и углов поворота виртуального паттерна относительно эталонного положения паттерна для текущего положения и текущей ориентации виртуального паттерна. Этот шаг выполняется после захвата ранее определенного эталонного положения 717. При определении смещения и ориентации виртуального паттерна, а следовательно, объекта, выполняется возврат к шагу 701 захвата изображения. На шаге 718 происходит запоминание определенного положения 719 объекта, а на шаге 720 сохраняется определенное изменение ориентации объекта.
В данном варианте осуществления этап а) - запись и предпочтительно начальная обработка данных, связанных с положением метки 1, при помощи приемного устройства 2 в цифровом виде - выполняется на шагах 701, 702, 708 и 709; этап б) - передача данных на блок 4 обработки, предпочтительно при помощи приемного блока 3, который предпочтительно сжимает полученные цифровые данные перед их отправкой на блок 4 обработки - не показан на ФИГ. 7 и может выполняться после шага 718. Этап в), на котором поворот и положение центра метки 1 определятся виртуальным поворотом и подстройкой эталонной модели характерных точек метки 1 под цифровые данные, и этап г), на котором определяется смещение и поворот метки 1 путем сравнения поворота и положения центра метки 1, определенных на этапе в), с эталонным положением центра метки 1 и эталонным поворотом метки 1, более подробно описаны в шагах 710-718.