Результат интеллектуальной деятельности: МЕХАНИЧЕСКИЙ ИНТЕРФЕЙС РАЗЪЕМНОГО УПРАВЛЯЕМОГО ЭНДОСКОПА
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к медицине и ветеринарии и может быть использовано для проведения эндоскопических диагностических или хирургических манипуляций.
Кроме того настоящее изобретение может быть использовано для создания эндоскопического оборудования со съемными эндоскопическими насадками, отделяемыми от рукоятки эндоскопа, с управляемым дистальным концом и различными характеристиками, например, такими как диаметр и/или длина трубки эндоскопа, которые могут быть отсоединены от рукоятки эндоскопа, в том числе, непосредственно во время проведения эндоскопических манипуляций.
В частности, настоящее изобретение относится к механическому интерфейсу разъемного эндоскопа, предназначенному для передачи механических управляющих воздействий, передаваемых от органов управления рукоятки эндоскопа к съемной насадке при соединении съемной насадки и рукоятки эндоскопа между собой, а также к соответствующему разъемному эндоскопу, содержащему отделяемые друг от друга рукоятку и съемную насадку эндоскопа.
УРОВЕНЬ ТЕХНИКИ
Из WO02055126 известна система для диагностических и хирургических манипуляций in vivo, являющаяся наиболее близким аналогом предлагаемого изобретения.
Система содержит эндоскопическое устройство, содержащее съемную вводимую часть и внешнюю часть (рукоятку) и в терминах настоящего изобретения представляет из себя разъемный управляемый эндоскоп.
Механический интерфейс для передачи управляющих воздействий между рукояткой и съемной частью реализован в виде петли и соответствующего крючка на каждой из двух тяг управления.
К недостаткам известного решения следует отнести невозможность отсоединения рукоятки и гибкого участка съемной части при любом ненулевом угле изгиба гибкого участка съемной части и необходимость вручную регулировать натяжение тяг управления после присоединения съемной части. Также к недостаткам известной системы относится отсутствие возможности адаптации управляющих воздействий, например, согласования максимальной величины перемещения тяг при необходимости использования съемных частей различных типов.
В US20140275763 описан эндоскоп, имеющий одноразовые компоненты и повторно используемые компоненты. Дистальный конец эндоскопа управляется модулем управления, расположенным в ручке эндоскопического устройства.
Предложенный эндоскоп, хотя и имеет сменяемую насадку, не является разъемным в смысле настоящего изобретения, поскольку не имеет разъемных элементов в линии передачи механического воздействия от рукоятки управления к управляемому объекту – дистальному концу эндоскопа. Предложенное в US20140275763 решение по размещению тросиков управления на управляющем барабане при смене эндоскопической насадки скорее относится к сборочной операции, которая не является оперативной и не может проводиться врачом во время эндоскопического осмотра или видеоэндоскопической операции. Также к недостаткам предложенной системы следует отнести нерешенность проблемы регулирования натяжения тяг (устранения люфтов) после замены одной съемной насадки на другую и наличие механической обратной связи изгибаемого дистального конца с органом управления, что вынуждает врача постоянно удерживать орган управления рукоятки в определенном положении, задающем величину управляющего воздействия, например угол изгиба дистального конца насадки, поскольку в случае отпускания врачом органа управления рукоятки, из-за наличия указанной обратной связи, он будет стремиться к возвращению в свое исходное положение, соответствующее нулевому углу изгиба дистального конца.
Вместе с тем, существует высокая практическая потребность в разъемных эндоскопах, позволяющих врачу заменять съемную часть эндоскопа оперативно, в том числе во время проведении эндоскопического обследования, без необходимости акцентировать внимание на технических аспектах устройства, и при этом иметь возможность использовать с одной рукояткой эндоскопа съемные части (насадки) различных типов, т.е. с различными характеристиками вводимой части, например, насадки, имеющие различную длину, диаметр, длину изгибаемого участка, различные максимальные углы изгиба и т.д., или даже не изгибаемые, но оснащенные, например, подвижными оптико-электронными элементами, размещенными в расположенной на дистальном конце вводимой части видеоголовке, как, например, предложено в US6478730.
Однако, реализация таких эксплуатационных свойств эндоскопа, во-первых, порождает инженерную задачу разработки механического интерфейса для передачи управляющих воздействий от рукоятки к съемной насадке эндоскопа, инвариантного к состоянию управляемого объекта, то есть при использовании которого разъединение и соединение частей эндоскопа не будет зависеть, в частности, от того, изогнут ли управляемый конец или он находится в исходном, неизогнутом состоянии так, чтобы врач имел возможность заменить съемную часть эндоскопа на другую в любой желаемый момент. И, во-вторых, очевидно, что максимально допустимое смещение тяг, управляющих изгибом вводимой части эндоскопа, зависит от типа объекта управления, и превышение этих ограничений может привести к поломке эндоскопической насадки. Иными словами, некоторые характеристики управления, такие как, например, диапазон перемещения тяг для изгиба дистального конца съемной насадки и чувствительность управления, в частности, количество оборотов колеса управления, требуемого для изгиба гибкого дистального конца насадки на один градус, зависят от типа объекта управления и должны быть учтены при разработке системы для обеспечения и повышения практической ценности разъемного эндоскопа посредством встраивания в съемную насадку специального механического устройства, предназначенного для преобразования и ограничения управляющих воздействий, передаваемых от органов управления рукоятки к съемной насадке эндоскопа.
Таким образом, несмотря на наличие известных подходов к реализации разъемных управляемых эндоскопов, остается актуальной разработка технического решения, удовлетворяющего перечисленным выше требованиям.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Таким образом, задачей настоящего изобретения является разработка механического интерфейса, предназначенного для передачи управляющих, в особенности механических, воздействий от рукоятки к съемной насадке эндоскопа через их разъемное соединение, который обеспечивает возможность замены съемной насадки при любом ее состоянии, в частности, при любом изгибе вводимой части съемной насадки эндоскопа, а также разработка механического устройства, размещаемого в съемной насадке эндоскопа, предназначенного для преобразования и ограничения управляющих воздействий, передаваемых через указанный выше механический интерфейс от органов управления рукоятки к съемной насадке эндоскопа.
Также задачей настоящего изобретения является разработка разъемного эндоскопа, содержащего отделяемые друг от друга рукоятку и съемную насадку эндоскопа, передача механических управляющих воздействий между которыми осуществляется при помощи механического интерфейса по настоящему изобретению, а также способа передачи механических управляющих воздействий между рукояткой и съемной насадкой эндоскопа.
Согласно первому аспекту настоящего изобретения задача изобретения решена благодаря механическому интерфейсу для разъемного эндоскопического прибора для передачи механических управляющих воздействий через разъемное соединение между рукояткой эндоскопа и съемной эндоскопической насадкой, содержащему ведущую часть механического интерфейса, размещаемую на рукоятке эндоскопа, и ведомую часть механического интерфейса, размещаемую на съемной насадке эндоскопа, причем ведущая и ведомая части механического интерфейса содержат каждая образованные по меньшей мере на их участках фрикционные поверхности (поверхности трения), сопрягаемые друг с другом в рабочем состоянии эндоскопа с возможностью передачи вращательного (крутящего) момента от ведущей части механического интерфейса к ведомой части механического интерфейса. Указанная передача вращательного момента, и тем самым, управляющего воздействия от рукоятки к съемной насадке эндоскопа, обеспечивается за счет фрикционного взаимодействия сопрягаемых фрикционных поверхностей ведущей и ведомой частей механического интерфейса.
Благодаря использованию механического интерфейса по настоящему изобретению механическое управление (воздействие), воспринимаемое органами управления рукоятки эндоскопа, может передаваться на объекты управления съемной насадки через разъемное соединение в виде вращательного (крутящего) момента, вырабатываемого в результате воздействия, оказываемого врачом на органы управления рукоятки и передаваемого, например, через систему промежуточных шестерен и червячную передачу на ведущую часть интерфейса. Вращательный момент, передаваемый в результате указанного фрикционного взаимодействия от фрикционной поверхности ведущей части интерфейса к фрикционной поверхности ведомой части интерфейса, далее преобразуется в съемной насадке в линейное перемещение тяг управления объектами управления на дистальном конце насадки. Оси вращения соединяемых (сопрягаемых) валов предпочтительно, но не обязательно, совпадают с продольной осью насадки. При этом обеспечена возможность сопряжения участков фрикционных поверхностей ведомой и ведущей частей механического интерфейса при любом их взаимном угловом положении друг относительно друга. Таким образом, за счет применения механического интерфейса по настоящему изобретению также обеспечена возможность присоединения съемной насадки к рукоятке эндоскопа, а также ее отсоединения от рукоятки вне зависимости от текущего состояния объекта управления, например изгиба гибкого участка вводимой части насадки, в частности, при любом взаимном угловом положении съемной насадки эндоскопа относительно его рукоятки.
В одном из вариантов реализации изобретения сопрягаемые фрикционные поверхности или описанные поверхности фрикционных участков ведущей и ведомой частей интерфейса представляют собой осесимметричные поверхности, оси которых совпадают в рабочем состоянии эндоскопа.
В одном из вариантов реализации изобретения сопрягаемые фрикционные поверхности ведущей и ведомой частей механического интерфейса выполнены на двух соосно расположенных в рабочем состоянии эндоскопа валах рукоятки и съемной насадки эндоскопа соответственно.
Предпочтительно формы сопрягаемых фрикционных поверхностей ведущего и ведомого валов по меньшей мере частично конгруэнтны и представляют собой осесимметричные поверхности, образованные вращением некоторой образующей кривой вокруг продольной оси ведущего и ведомого валов съемной насадки и рукоятки соответственно.
Вращаемая образующая кривая может быть составлена из различных комбинаций отрезков и/или кривых таким образом, что описанная поверхность имеет, по меньшей мере частично, по существу цилиндрическую, коническую, сферическую, эллипсоидную или параболоидную форму.
В общем случае образующая охватываемой фрикционной поверхности и образующая охватывающей фрикционной поверхности конгруэнтны и являются гладкими монотонными функциями, но могут состоять также из монотонных отрезков такой функции, то есть быть гладкими кусочно-монотонными функциями. В частном варианте реализации образующие охватываемой и охватывающей фрикционной поверхностей могут быть строго монотонными функциями или, соответственно, состоять из строго монотонных отрезков. Поверхности, образуемые при вращении образующих, являющихся монотонными или кусочно-монотонными функциями, будут называться в контексте настоящего изобретения «конусообразными поверхностями».
В предпочтительном варианте реализации образующие охватываемой и охватывающей фрикционной поверхностей конгруэнтны и представляют из себя отрезок или дугу, соответственно образующие при своем вращении конус, в частности усеченный конус, сфероид, эллипсоид или параболоид, в частности, усеченные. Является эта функция, описывающая образующую кривую, монотонно убывающей или монотонно возрастающей, определяется выбором того, какая из сопрягаемых поверхностей является охватывающей.
В общем случае сопрягаемые фрикционные поверхности ведущего и ведомого валов могут представлять собой произвольные и полностью не совпадающие друг с другом, в частности различные на ведущем и ведомом вале, комбинации из фрикционных и нефрикционных участков, описанная поверхность которых является осесимметричной поверхностью. Например, фрикционная поверхность ведомого вала может быть непрерывной, т.е. способной образовывать фрикционную пару в любой своей точке, а фрикционная поверхность ведущего вала – представлять из себя произвольную, упорядоченную или даже неупорядоченную комбинацию фрикционных участков (участков фрикционной поверхности), например, представляющих собой фрикционные радиальные сектора или области фрикционной поверхности спиралевидной, овальной или иной формы. В одном из вариантов реализации, наоборот, непрерывной может быть поверхность ведущего вала, а фрикционная поверхность ведомого вала – представлять из себя комбинацию фрикционных и нефрикционных участков.
Так, в одном из вариантов реализации одна из сопрягаемых ведущей и ведомой фрикционных поверхностей может содержать фрикционные элементы только на расположенных в ее окружном направлении участках фрикционной поверхности, например, представлять собой расположенные в окружном направлении фрикционные сектора, описанная поверхность которых является комплементарной с сопрягаемой с ней сплошной фрикционной поверхностью. При этом также будет обеспечена возможность сопряжения ведомой и ведущей фрикционных поверхностей при любом их взаимном угловом положении друг относительно друга, однако в данном случае фрикционное взаимодействие между сопрягаемыми фрикционными поверхностями будет осуществляться не по всей площади сопрягаемых поверхностей.
В одном из вариантов реализации настоящего изобретения сопрягаемые фрикционные поверхности выполнены в виде плоских фрикционных поверхностей, жестко размещенных на проксимальном конце ведомого вала и дистальном конце ведущего вала соответственно и проходящих перпендикулярно оси вращения.
В предпочтительном варианте осуществления расстояние от каждой из точек сопрягаемых участков фрикционных поверхностей или их описанной поверхности до оси вращения, при перемещении проекции указанных точек на ось вращения в дистальном направлении, равномерно или постоянно уменьшается. В частности, сопрягаемые фрикционные поверхности имеют конусообразную или усеченную конусообразную форму так, что сопрягаемые фрикционные поверхности обеспечивают самоцентрирующееся соединение ведущей и ведомой фрикционных поверхностей, при этом «охватываемой» может быть любая из сопрягаемых поверхностей съемной части или рукоятки эндоскопа соответственно.
Передача механических управляющих воздействий через разъемные по фрикционным поверхностям части механического интерфейса обеспечивает достижение технического результата, заключающегося в обеспечении возможности отсоединения вводимой части эндоскопа от блока управления эндоскопом при любом состоянии вводимой части эндоскопа, что, в свою очередь, позволяет врачу исключить необходимость проведения настроечных или сборочных операций в процессе присоединения съемной насадки к рукоятке и очень оперативно отсоединять съемную насадку и заменять ее новой, включая насадку с иным типом управляемого объекта, в том числе непосредственно во время проведения диагностической процедуры, без выполнения сложных механических операций в процессе замены.
В одном из вариантов осуществления изобретения в ведущем и ведомом валах и в расположенных на них сопрягаемых фрикционных поверхностях выполнены сквозные осевые цилиндрические отверстия, которые позволяют осуществить передачу через проходящие сквозь них дополнительные валы или тяги линейного и/или вращательного движения от рукоятки в насадку. Это обеспечивает достижение технического результата, заключающегося в возможности управления не только гибким концом (объектом управления) насадки, но и хирургическим инструментом, размещенным на дистальном конце съемной насадки.
Задача преобразования и ограничения управления решена в устройстве по настоящему изобретению благодаря использованию механического устройства для преобразования и ограничения управляющих воздействий, передаваемых от органов управления рукоятки к съемной насадке эндоскопа, расположенного в съемной эндоскопической насадке, содержащего разнонаправленные винтовые парные элементы и упоры, расположенные дистально и проксимально у каждого из винтовых элементов. При этом, шаг винтовых элементов определяет чувствительность управления, а длина винтовой части каждого из винтовых элементов определяет диапазон управляющего воздействия, в частности, максимальную величину перемещения тяг для изгиба дистального конца эндоскопической насадки.
Согласно второму аспекту изобретения предложен разъемный эндоскопический прибор, содержащий рукоятку эндоскопа и съемную насадку эндоскопа, выполненную с возможностью разъемного соединения с рукояткой эндоскопа, причем передача механических управляющих воздействий от рукоятки эндоскопа на съемную насадку эндоскопа обеспечена посредством механического интерфейса по настоящему изобретению.
Согласно следующему аспекту изобретения предложена съемная насадка разъемного эндоскопического прибора, содержащая образованные на ее проксимальном конце фрикционные поверхности, выполненные с возможностью сопряжения с ответными фрикционными поверхностями, расположенными на дистальном конце рукоятки разъемного эндоскопического прибора, с обеспечением передачи вращательного момента от рукоятки к съемной насадке в рабочем состоянии эндоскопа.
Согласно следующему аспекту изобретения предложена рукоятка разъемного эндоскопического прибора, содержащая образованные на ее дистальном конце фрикционные поверхности, выполненные с возможностью сопряжения с ответными фрикционными поверхностями, расположенными на проксимальном конце съемной насадки разъемного эндоскопического прибора, с обеспечением передачи вращательного момента от рукоятки к съемной насадке в рабочем состоянии эндоскопа.
Задача изобретения решена также способом передачи механических управляющих воздействий от рукоятки к съемной насадке эндоскопа, согласно которому указанную передачу обеспечивают посредством механического интерфейса, содержащего ведущую часть интерфейса, размещаемую на рукоятке эндоскопа, и ведомую часть интерфейса, размещаемую на съемной насадке эндоскопа, причем ведущая и ведомая части интерфейса содержат каждая участки фрикционные поверхности, сопрягаемые друг с другом в рабочем состоянии эндоскопа с возможностью передачи вращательного момента от ведущей части интерфейса к ведомой части интерфейса.
Благодаря способу передачи механических управляющих воздействий от рукоятки к съемной насадке эндоскопа по настоящему изобретению, согласно которому обеспечена возможность преобразования передаваемого через механический интерфейс управляющего вращательного момента в линейное перемещение, например, тяг для управления изгибом вводимой части съемной насадки эндоскопа, обеспечивается достижение технического результата, заключающегося в обеспечении возможности использования с одной рукояткой эндоскопа множества разнообразных эндоскопических насадок с различными типами управляемых частей и осуществления их оперативной замены во время проведения медицинской процедуры. При этом врачу не надо заботиться о специфике управления каждым из типов насадки. Кроме того, использование винтовой передачи предотвращает передачу механического воздействия от изгиба управляемой части эндоскопа обратно на орган управления рукоятки эндоскопа. Это позволяет врачу исключить необходимость постоянно удерживать (фиксировать положение) органа управления рукоятки, что освобождает пальцы руки врача для других манипуляций, например, рычагом хирургического инструмента.
В настоящем изобретении используются следующие термины и определения.
Под «разъемным управляемым эндоскопом» в смысле настоящего изобретения понимается эндоскопическое устройство, состоящее из основной части, называемой далее также рукояткой, и отделяемой (съемной) части, называемой далее также эндоскопической насадкой, соединяемых друг с другом разъемным образом. При этом отделяемая (съемная) часть содержит механически управляемые элементы, называемые далее также объектами управления насадки, но не содержит органов механического управления указанными управляемыми элементами, а основная часть, наоборот, не содержит механически управляемых элементов, но содержит органы управления, предназначенные для передачи механических управляющих воздействий на управляемые элементы отделяемой части. При этом принципиальным для реализации настоящего изобретения является то, что линии механического и электрического управления между отделяемой частью и основной частью претерпевают разрыв при отсоединении указанных отделяемой и основной частей эндоскопа друг от друга. Для передачи механических управляющих воздействий через место разрыва линий передачи механического управления между расположенными на основной части эндоскопа органами управления и управляемыми элементами отделяемой части эндоскопа используется механический интерфейс.
Под термином «эндоскоп» подразумевается устройство, состоящее из основной части (рукоятки) с присоединенной к ней эндоскопической насадкой.
Под «основной частью» эндоскопа понимается устройство, удерживаемое врачом в руке во время использования эндоскопа, и содержащее органы механического управления и, возможно, органы электрического управления, а также, при необходимости, присоединяемые дополнительные блоки. Указанные дополнительно присоединяемые блоки могут представлять из себя, например, электромоторы, источники освещения, генераторы лазерного излучения и т.п. или иные электронные компоненты. Однако, эндоскопические устройства с отсоединяемыми компонентами основной части, в которых не осуществляется разрыв линий (элементов) механического управления между управляемыми элементами отделяемой части (насадки) и органами управления основной части, не относятся к эндоскопам, рассматриваемым в настоящем изобретении. Под «основной частью» эндоскопа понимается, в частности, удерживаемая врачом рукоятка эндоскопического прибора.
Под «вводимой частью» эндоскопа подразумевается помещаемая в тело пациента полностью или частично часть эндоскопической насадки от ее дистального конца до проксимальной части трубчатого тела.
Под «отделяемой эндоскопической насадкой» понимается отделяемая (съемная) часть эндоскопа, выполненная в виде неразъемного устройства, которое в основном содержит дистальную часть, представляющую собой вводимую часть эндоскопа и содержащую на своем дистальном конце управляемые элементы, например управляемый гибкий участок, ведомую часть механического интерфейса эндоскопической насадки для соединения с ведущей частью механического интерфейса основной части, и электронные или электрические интерфейсы сопряжения насадки с основной частью на своей проксимальной части (своем проксимальном конце) и не содержит органов управления, предназначенных для управления управляемыми элементами насадки.
Таким образом, под терминами «насадка», «отделяемая насадка», «эндоскопическая насадка» подразумевается отделяемая от рукоятки часть эндоскопа.
Под «соединенным состоянием» насадки и основной части понимается такое состояние эндоскопа, при котором механическое воздействие на орган управления основной части через механический интерфейс передается на насадку, в частности, на ее управляемые элементы. Согласно настоящему изобретению управление эндоскопической насадкой при ее разъединенном с рукояткой состоянии невозможно.
«Соединенное состояние» насадки и рукоятки называется также «рабочее состояние» эндоскопа. В отличие от этого, состояние, при котором насадка и рукоятка отсоединены друг от друга называется «нерабочее состояние» эндоскопа.
Под «эндоскопическим комплексом» понимается система, содержащая соединенные между собой насадку и основную часть в рабочем состоянии эндоскопа и устройство отображения, отображающее видеоинформацию об исследуемом объекте, получаемую от вводимой части эндоскопа.
Под «механическими органами управления» понимаются колеса или рычаги, размещенные на рукоятке, посредством физического воздействия на которые рукой врач изменяет угловые или линейные характеристики объекта управления при нахождении эндоскопа в рабочем состоянии.
Под «объектами управления» понимаются управляемые элементы вводимой части эндоскопа, расположенные на дистальной части насадки, например, управляемые (изгибаемые) участки вводимой части эндоскопа или вращаемые оптические элементы, например, призма, или зеркало, или вращаемый оптический сенсор, которые изменяют свои геометрические характеристики, например свое линейное или угловое положение, под влиянием механического воздействия, оказываемого врачом на орган управления рукоятки.
Под «механическим интерфейсом» понимается совокупность механических элементов, ведущая часть которых размещена на дистальном конце рукоятки, а ведомая часть которых размещена на проксимальном конце насадки эндоскопа, и которые предназначены для передачи вращательного момента (сигнала управления) от органа управления рукоятки к объектам управления насадки с целью изменения их линейных или угловых характеристик. Ведущая и ведомая части интерфейса выполнены разъемно и соосно.
Под «описанной поверхностью» понимается осесимметричная поверхность, включающая все участки фрикционной поверхности ведущей или, соответственно, ведомой частей механического интерфейса.
Под «образующей кривой» осесимметричной поверхности понимается линия пересечения указанной поверхности с плоскостью сечения, проходящей через указанную ось.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Описание настоящего изобретения сопровождается соответствующими чертежами, на которых изображены:
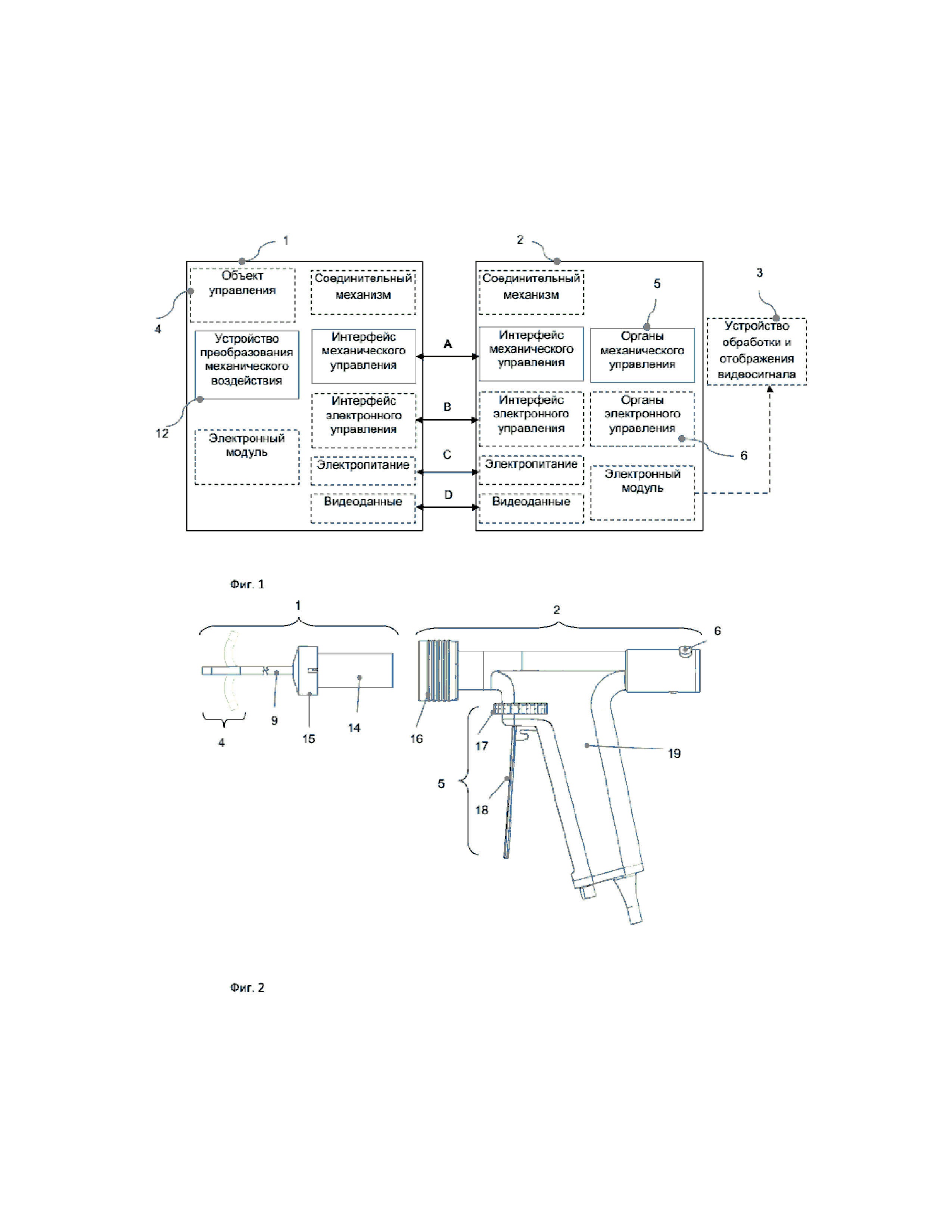
на фиг. 1 изображена блок-схема эндоскопического комплекса со съемной эндоскопической насадкой;
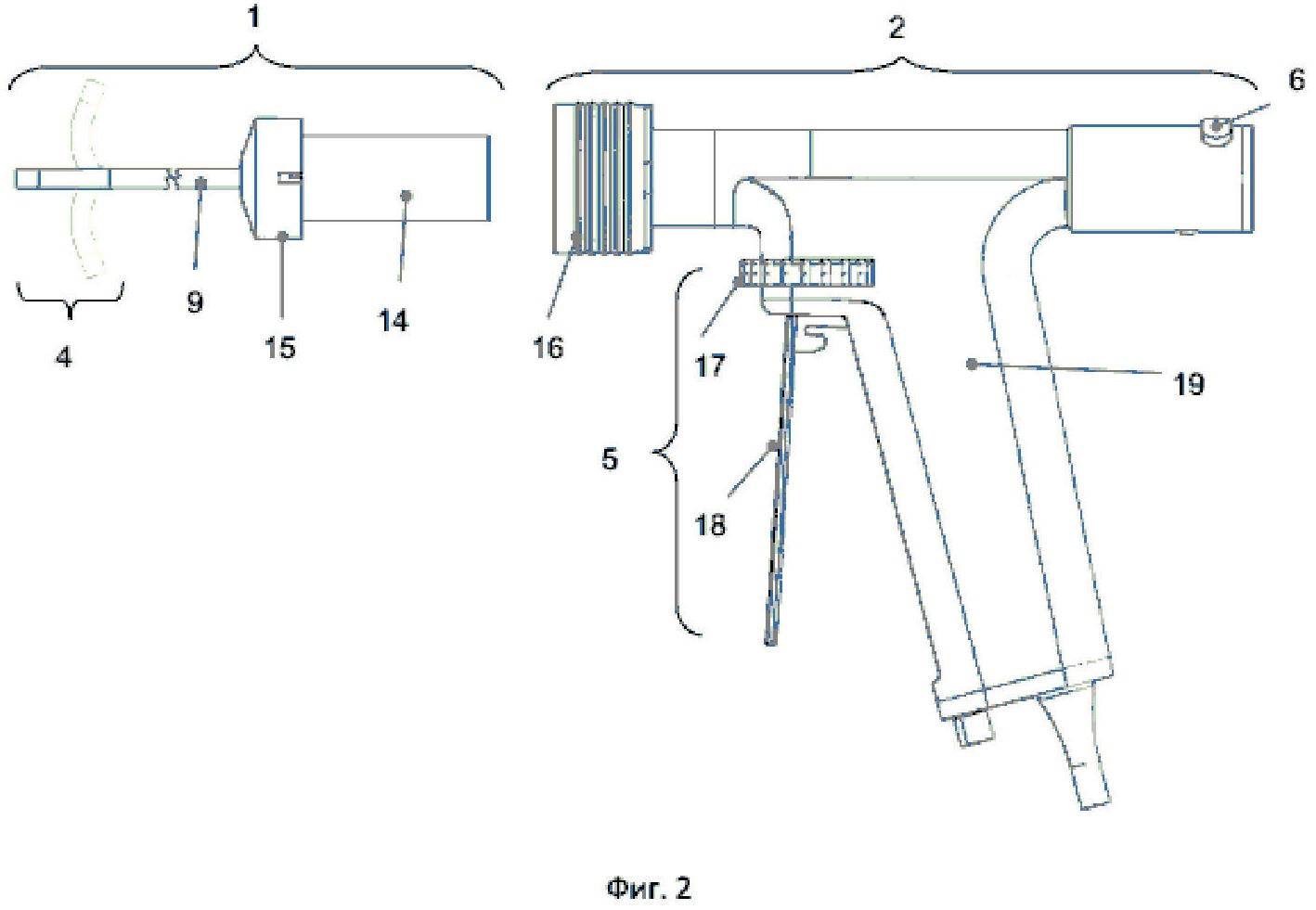
на фиг. 2 изображен общий вид рукоятки и эндоскопической насадки в одном из вариантов реализации в нерабочем состоянии;
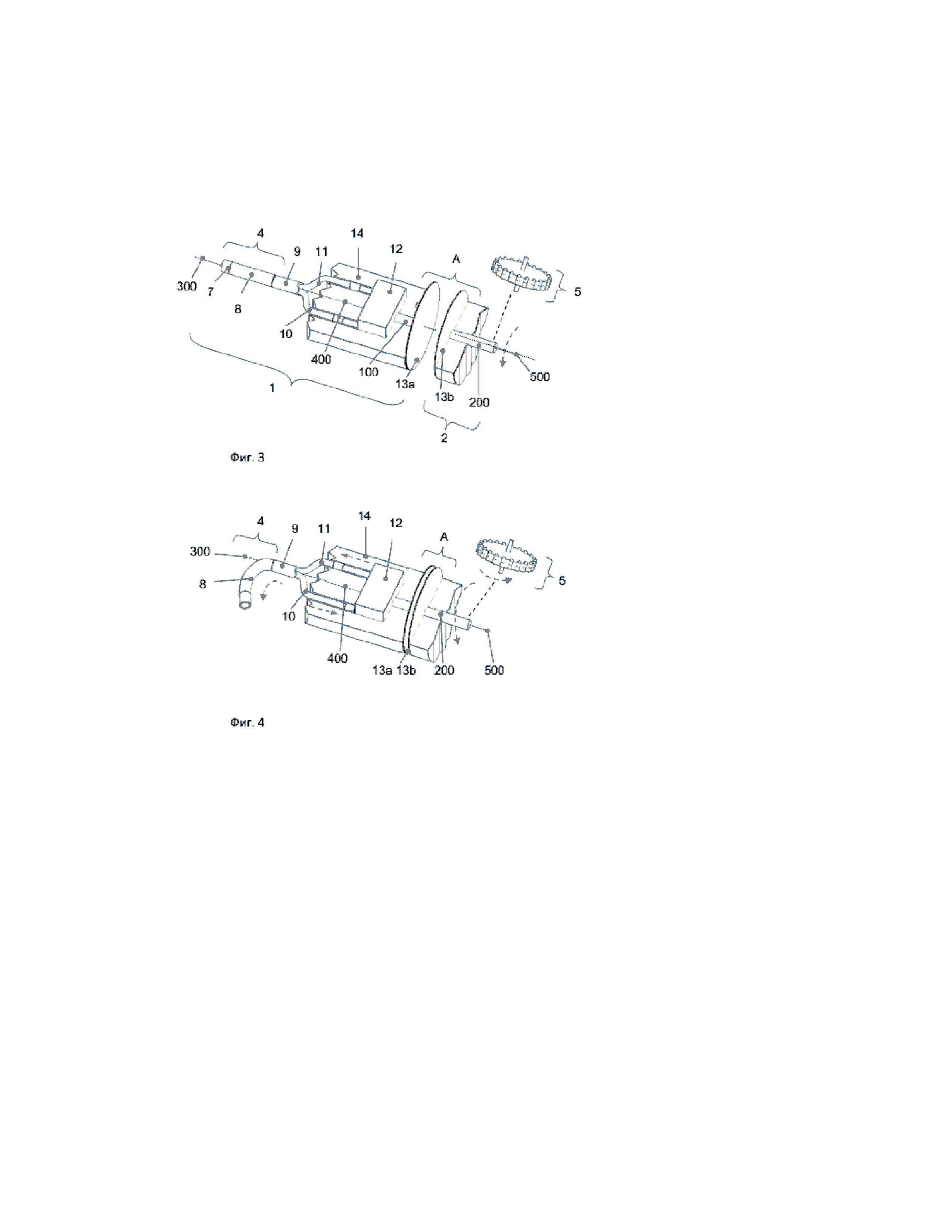
на фиг. 3 изображена структурная схема съемной эндоскопической насадки и механического интерфейса управления ее дистальной частью в нерабочем состоянии;
на фиг. 4 изображена структурная схема съемной эндоскопической насадки и механического интерфейса управления ее дистальной частью в рабочем состоянии;
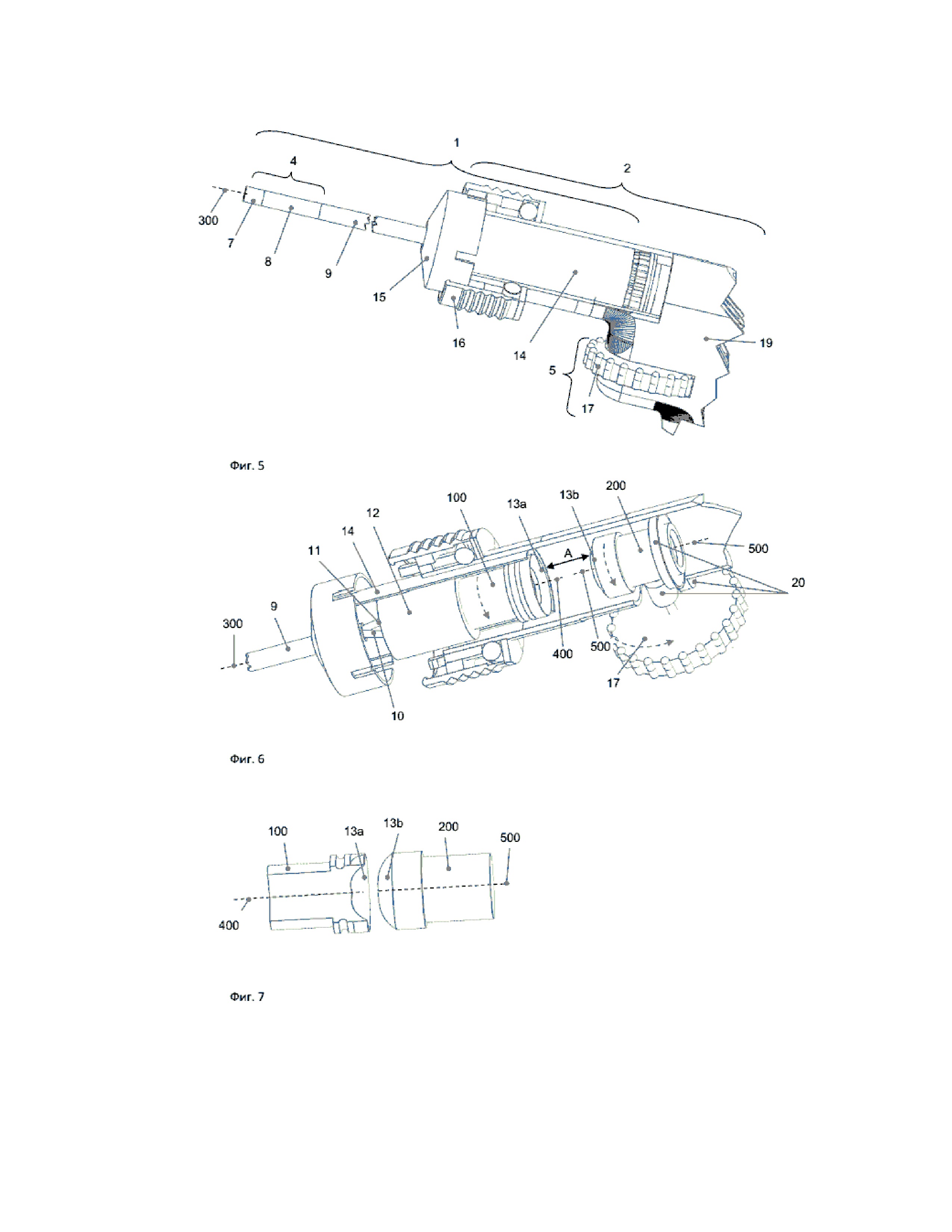
на фиг. 5 изображен общий вид дистальной части рукоятки и эндоскопической насадки в одной из возможных реализаций в рабочем состоянии;
на фиг. 6 изображен возможный вариант реализации механического интерфейса управления дистальным концом эндоскопической насадки;
на фиг. 7 изображен вариант реализации механического интерфейса управления в виде ведущего и ведомого валов с вариантом реализации фрикционных поверхностей насадки без сквозного отверстия в указанных валах;
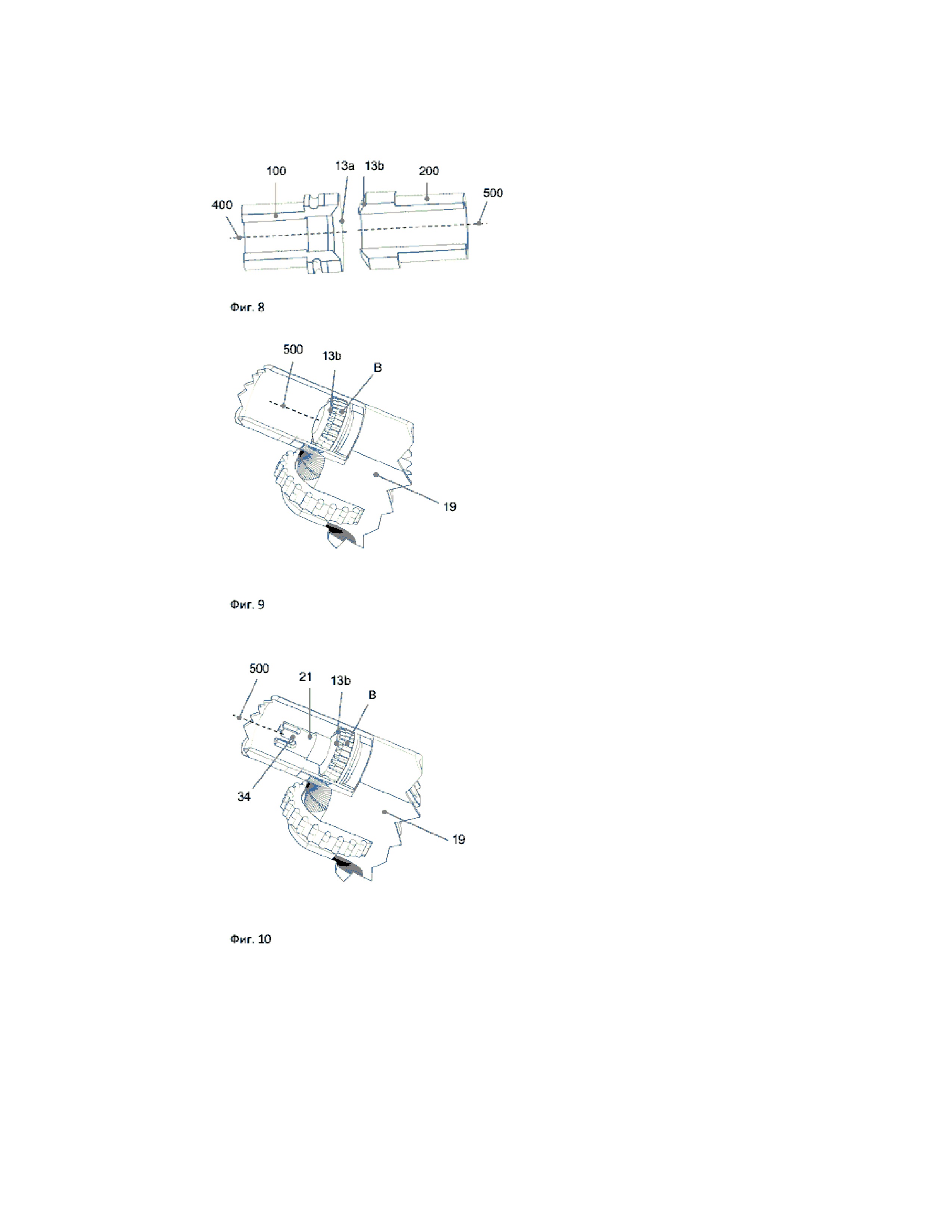
на фиг. 8 изображен вариант реализации механического интерфейса управления в виде ведущего и ведомого валов с вариантом реализации фрикционных поверхностей и со сквозными отверстиями в указанных валах;
на фиг. 9 изображен вариант реализации ведущего вала механического интерфейса без сквозного отверстия и электронным интерфейсом рукоятки;
на фиг. 10 изображен возможный вариант реализации ведущего вала механического интерфейса со сквозным отверстием и проходящим через него дополнительным ведущим валом;
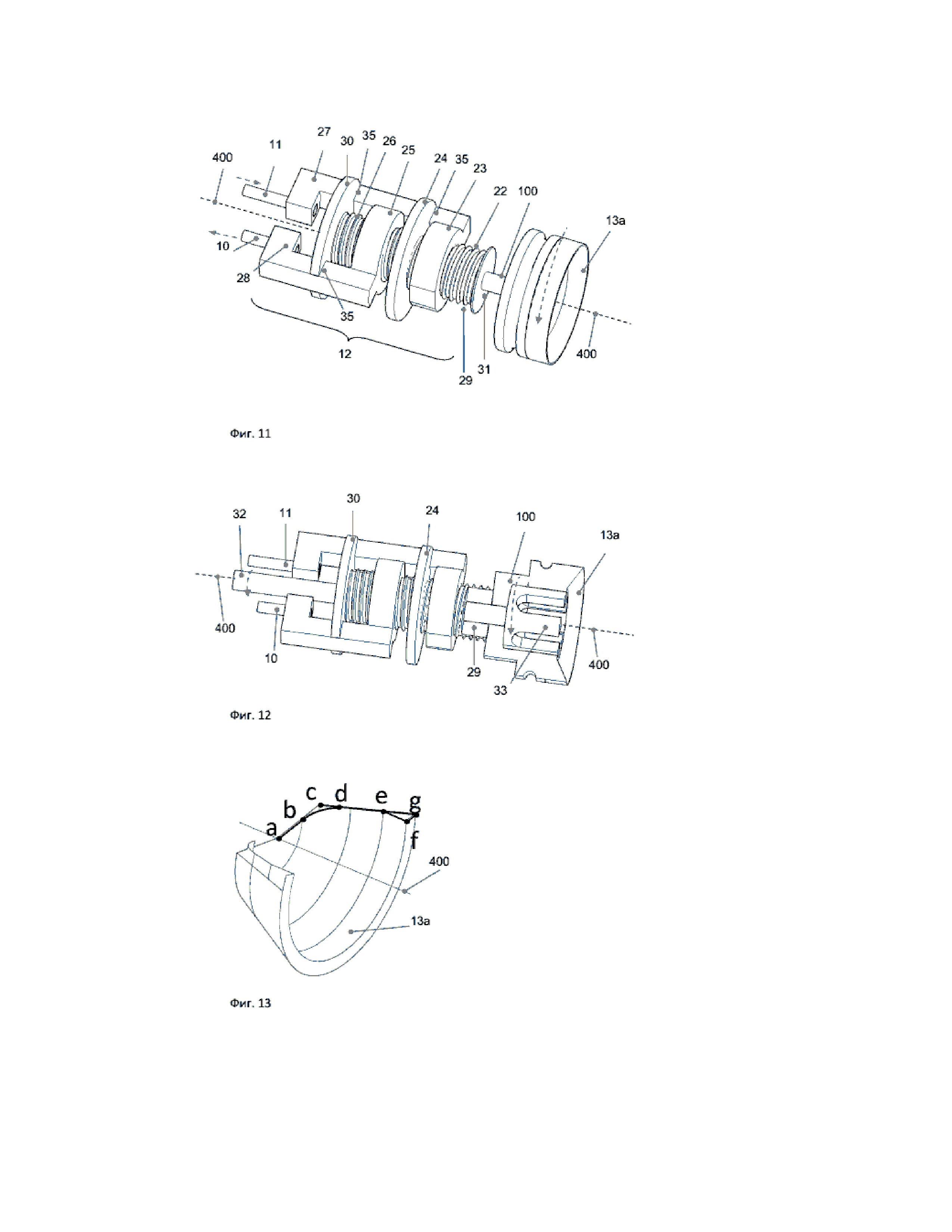
на фиг. 11 изображен вариант реализации механизма преобразования механического управляющего воздействия, содержащего винтовые элементы и монолитные ведущий и ведомый валы;
на фиг. 12 изображен вариант реализации механизма преобразования механического управляющего воздействия, содержащего винтовые элементы и ведущий и ведомый валы с отверстиями
на фиг. 13 изображена огибающая кривая охватывающей фрикционной поверхности;
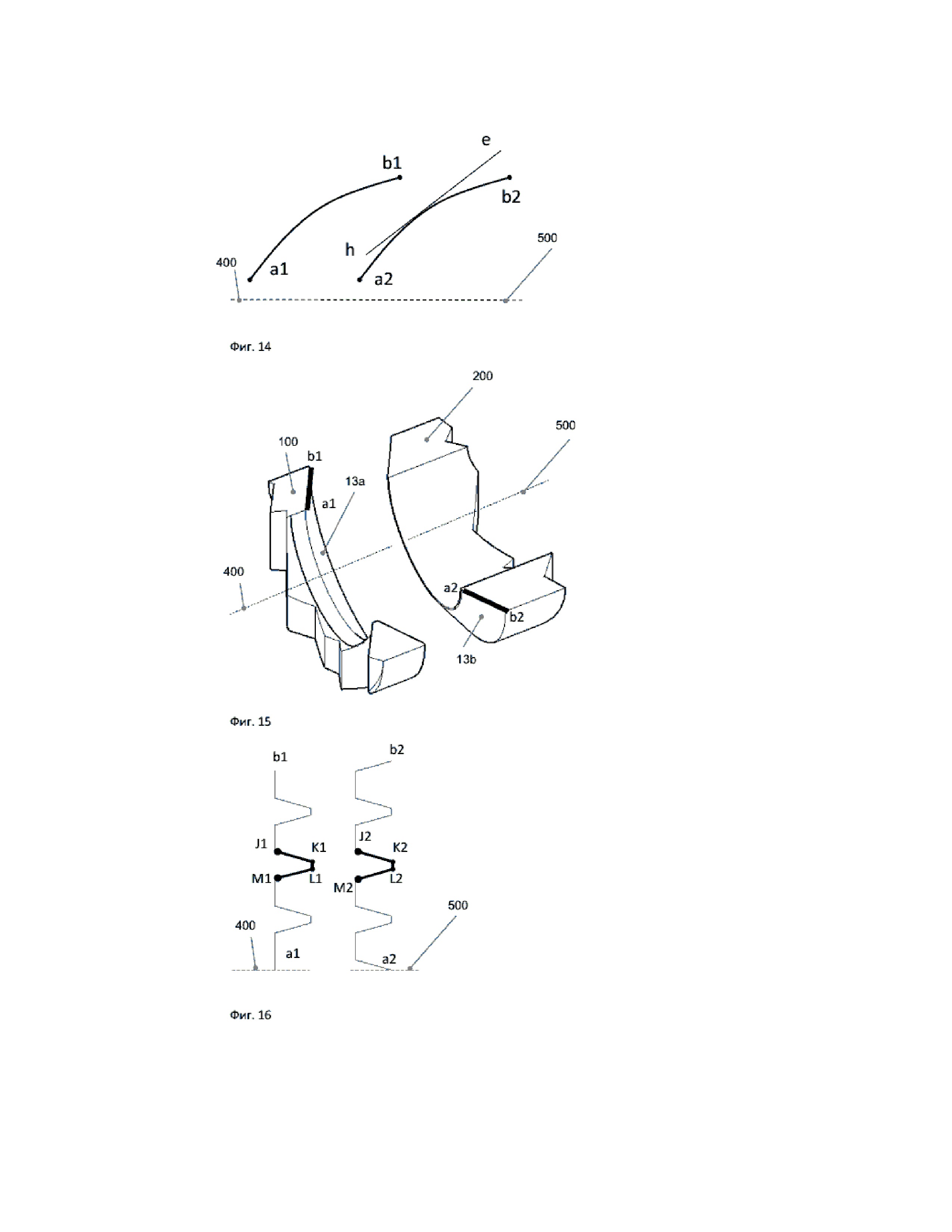
на фиг. 14 изображены образующие кривые сопрягаемых фрикционных поверхностей ведущего и ведомой части механического интерфейса;
на фиг. 15 изображен вариант реализации сопрягаемых фрикционных поверхностей, расположенных на полых валах с отверстиями;
на фиг. 16 изображен пример криволинейной огибающей фрикционных поверхностей, выполненных в форме меандра.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
На фиг. 1 изображена блок-схема эндоскопического комплекса со съемной эндоскопической насадкой по настоящему изобретению. Рассматриваемая разъемная эндоскопическая система содержит съемную эндоскопическую насадку 1, основную часть или рукоятку 2 и устройство 3 обработки и отображения изображения.
Насадка 1 и основная часть 2 выполнены с возможностью разъемного соединения друг с другом. Устройство 3 обработки и отображения выполнено в виде отдельного устройства или механически присоединено к основной части 2. Между основной частью 2 и устройством 3 обработки и отображения осуществляется электрическая проводная или беспроводная (радио) связь. Дополнительно, основная часть 2 может содержать источники автономного электропитания (на фиг. 1 не показаны).
Между эндоскопической насадкой 1 и основной частью 2 предусмотрены разъемные электрические и механические соединения в виде интерфейса А механического управления и интерфейсов В, С, D электронного управления для передачи механических и электронных управляющих воздействий или сигналов между основной частью 2 и съемной насадкой 1 эндоскопа. Основная часть 2 содержит органы 5 механического управления, предназначенные для выработки механических управляющих воздействий для управления объектами 4 управления, в частности, гибким концом вводимой части эндоскопа, расположенными на дистальном конце насадки 1.
На фиг. 2 изображен общий вид рукоятки 2 и эндоскопической насадки 1 эндоскопа в одном из вариантов реализации в нерабочем состоянии. Эндоскопическая насадка 1 содержит корпус 14 эндоскопической насадки 1, неуправляемый трубчатый элемент 9, соединенный с корпусом 14, и средства 15 фиксации для разъемного соединения эндоскопической насадки с механизмом фиксации 16, расположенным на дистальном конце рукоятки 2. На дистальном конце трубчатого элемента 9 расположен управляемый элемент или объект 4 управления насадки 1. Объект управления может представлять собой, в частности, управляемый (изгибаемый) участок 8 эндоскопической насадки (см. фиг. 4). В других вариантах реализации управляемый элемент может представлять собой, например, вращаемые оптические элементы видеоголовки.
Основная часть 2 эндоскопа содержит рукоятку 19, предназначенную для захвата основной части 2 эндоскопа рукой врача, органы 5 механического управления, предназначенные для выработки механических управляющих воздействий посредством воздействия на них рукой врача, удерживающей рукоятку 19 основной части 2, для управления объектами 4 управления насадки 1, а также механизм 16 фиксации, предназначенный для разъемного соединения со средствами 15 фиксации съемной насадки 1 для взаимной фиксации насадки 1 в основной части 2 в рабочем состоянии эндоскопа. Органы 5 механического управления могут быть выполнены, в частности, в виде поворотного или рычажного органа управления, например поворотного колеса 17 или нажимного рычага 18, приводимых в действие пальцами руки, удерживающей рукоятку 19. Основная часть 2 может также содержать органы 6 электронного управления, а также электронный модуль для передачи сигналов видеоизображения на устройство 3 обработки и отображения видеосигнала.
Съемные эндоскопические насадки 1 выполняются с различными типами дистальных концов 4 и/или диаметров трубчатых элементов 9, предназначенных для различных видов диагностических процедур, но с одинаковыми корпусами 14, средствами 15 фиксации и одинаковой ведомой частью механического интерфейса А таким образом, что вне зависимости от типа дистального конца 4 или диаметра трубчатого элемента 9 все эндоскопические насадки 1 могут быть соединены с основной частью 2 с получением рабочего состояния эндоскопа (фиг. 2).
На проксимальной части корпуса 14 насадки размещены также элементы ведомой части механического интерфейса А, соответствующие (комплементарные) элементам ведущей части интерфейса А основной части 2 эндоскопа, и элементы электрических интерфейсов В, C и D, являющиеся ответными для соответствующих элементов электрических интерфейсов В, C и D основной части 2. Механический интерфейс А рассматривается более подробно ниже.
Интерфейсы B, C, D служат для передачи электрических и электронных сигналов между основной частью 2 и съемной насадкой 1, в частности, для подачи электропитания на электронные компоненты насадки 1, такие как, например, видеоголовка 7, или передачи сигналов видеоизображения с видеоголовки 7 на устройство 3 обработки и отображения видеосигнала, приведены для общности описания и далее в изобретении подробно не рассматриваются. Реализация электронных интерфейсов B, C, D возможна, например, с использованием подпружиненных контактов (погопинов), расположенных по окружности, и соединяемых при присоединении насадки 1 к основной части 2 наряду с элементами механического интерфейса А (см. фиг. 9, 10).
В общем случае, кроме поворотного колеса 17 или нажимного рычага 18, сигнал механического управления может создаваться на основной части 2 электрическим или гидравлическим приводом, однако любое управляющее механическое воздействие должно преобразоваться во вращательный момент на ведущей части механического интерфейса А, в частности, на ведущем вале 200 (фиг. 3).
Механизм 16 фиксации основной части 2 представляет собой подпружиненную защелку, реализованную таким образом, что врач, одной рукой удерживая рукоятку 19, вставляет корпус 14 насадки 1 в рукоятку 19 перемещая ее в проксимальном направлении до механической фиксации средств 15 фиксации в механизме 16. Для извлечения насадки 1 врач рукой воздействует на внешний подвижный корпус механизма 16 и выводит защелку из зацепления, после чего он может извлечь насадку 1 из основной части 2. При фиксации насадки 1 в основной части 2 посредством средств 15, 16 фиксации фрикционные поверхности ведущей и ведомой частей механического интерфейса А приходят в соединение, т.е. сопрягаются друг с другом с образованием рабочего состояния эндоскопа. Напротив, при извлечении насадки 1, т.е. при ее отсоединении от основной части 2 или рукоятки 19, фрикционные поверхности ведущей и ведомой частей механического интерфейса А разъединяются. При соединении или разъединении фрикционных поверхностей интерфейса А никаких фиксирующих соединений (типа защелки или иного зацепления) между частями механического интерфейса А не образуется.
Средства 15 фиксации насадки 1 в механизме 16 фиксации основной части 2 представляют собой в одном из вариантов реализации штырьки и прорези, необходимые для механической фиксации насадки в механизме фиксации 16, с внешней и дистальной части прикрытые колпачком для предотвращения повреждения защитных перчаток врача. Кроме того, в колпачке выполнены прорези для обеспечения предопределенного позиционирования (поворот вдоль продольной оси) насадки 1 при ее совмещении с основной частью 2.
К рукоятке 19 могут быть присоединены дополнительные съемные модули, такие как, например, расположенный на проксимальной части рукоятки 19 (фиг. 2) модуль электронного управления с кнопками 6. Однако эти блоки не оказывают механического воздействия на процесс механического управления объектом 4 управления и не содержат объектов механического управления, управляемых посредством органов 5 механического управления.
Принцип передачи механических управляющих воздействий от органов 5 механического управления (фиг. 2) основной части 2 на насадку 1 проиллюстрирован на фиг. 3, 4, на которых изображен эндоскоп в нерабочем состоянии (фиг. 3) и в рабочем состоянии (фиг. 4).
Основными элементами механического интерфейса А являются соосно расположенные комплементарные сопрягаемые фрикционные осесиммеричные поверхности 13а и 13b, которые в самом простом варианте реализации, показанном на фиг. 3, 4, представляют собой плоские круговые фрикционные поверхности, расположенные на круговых элементах, жестко соединенных с ведущим 200 и ведомым 100 валами соответственно на их дистальном и проксимальном концах соответственно. При этом ведущая фрикционная поверхность 13b совместно с ведущим валом 200 образует ведущую часть механического интерфейса А, а ведомая фрикционная поверхность 13a совместно с ведомым валом 200 образует ведомую часть механического интерфейса А. В общем случае, оси 400, 500 вращения ведомого и ведущего валов 100 и 200 в рабочем положении эндоскопа совпадают между собой, но могут не совпадать с продольной осью 300 насадки 1, однако, на фиг. 3 приведен предпочтительный вариант реализации, при котором продольная ось 300 насадки 1 совпадает с продольной осью 500 ведущего вала 200 и продольной осью 400 ведомого вала 100. Из условий соосности валов 100 и 200 следует, что оси вращения 400 и 500 валов 100 и 200 соответственно лежат в рабочем состоянии эндоскопа на одной прямой. Если корпус 14 насадки 1 выполнен не осесимметричным, то под продольной осью 300 насадки 1, для определенности, следует понимать продольную ось трубчатого элемента 9.
Механический интерфейс А для передачи механических управляющих воздействий от органов 5 управления рукоятки 19 на объект управления, в частности, управляемый (изгибаемый) участок эндоскопической насадки 1, реализован следующим образом.
На дистальной части рукоятки 19 размещен ведущий вал 200 механического управления, который, в одном из вариантов реализации изобретения, приводится во вращение, например, посредством поворотного органа 17 механического управления через промежуточные шестерни 20 (фиг. 6). В другом варианте реализации обеспечение вращения вала 200 возможно с использованием электрических двигателей или гидравлических или пневматических устройств, соединенных с основной частью 2 или размещенных в ней. Сопрягаемый с ведущим валом 200 рукоятки 19 ведомый вал 100 размещен на проксимальной части насадки 1. В рабочем состоянии эндоскопа валы 100 и 200 соприкасаются своими торцами через расположенные на указанных торцах сопрягаемые фрикционные поверхности 13а и 13b с образованием фрикционной пары. Передаточное отношение образуемой фрикционной передачи равно 1. Таким образом, вращательный момент от органа 5 управления, например поворотного колеса 17, после преобразований, осуществленных промежуточными шестернями 20 (фиг. 6) через фрикционную пару, образованную фрикционными поверхностями 13а и 13b валов 100 и 200, передается на ведомый вал 100 съемной эндоскопической насадки 1.
Сопрягаемые фрикционные поверхности 13а и 13b являются конгруэнтными или комплементарными и, в общем виде, определяются как осесимметричные поверхности, образованные вращением некоторой кривой вокруг продольной оси ведущего или, соответственно, ведомого валов 100, 200. Образующая кривая, в общем виде, может являться произвольной комбинацией отрезков и кривых, при этом расстояние от оси вращения до любой точки образующей кривой обеих фрикционных поверхностей не должно увеличиваться при перемещении проекции указанной точки на продольную ось, например, в дистальном направлении, указанной оси, или, соответственно, в проксимальном направлении указанной оси. Таким образом, расстояние от оси вращения до точки образующей кривой любой из фрикционных поверхностей 13а и 13b, проекция которой на ось вращения расположена дальше в дистальном направлении указанной оси, должно быть меньше или равно расстоянию от оси вращения до точки образующей кривой, проекция которой на ось вращения расположена ближе в дистальном направлении указанной оси. В этом варианте реализации ведомая фрикционная поверхность 13a насадки 1 будет являться охватывающей, а ведущая фрикционная поверхность 13b – охватываемой, как показано, например, на фиг. 7 и 8. Очевидно, что для случая выполнения ведомой фрикционной поверхности 13a охватываемой, а ведущей фрикционной поверхности 13b – охватывающей будет выполняться обратное соотношение, т.е. расстояние от оси вращения до точек образующей кривой будет постоянной или увеличиваться при перемещении проекции указанных точек в дистальном направлении указанной оси.
Выполнение указанного выше условия необходимо для исключения образования в осевом направлении поднутрений на фрикционных поверхностях механического разъема и обеспечения возможности сопряжения, т.е. фрикционного взаимодействия, указанных поверхностей предпочтительно по всей их площади. Таким образом, фрикционные поверхности 13а и 13b могут представлять собой комбинацию цилиндрических, конусных, сферических и других криволинейных осесимметричных поверхностей или их сегментов. Фрикционные поверхности 13а и 13b могут быть, в частности, плоскими, как показано на фиг. 3 и 4, однако в предпочтительном варианте их реализации описанная поверхность обеих сопрягаемых фрикционных поверхностей 13а, 13b имеет вид усеченного конуса, что обеспечивает самоцентрирующееся соединение валов 100 и 200 при соединении насадки 1 с рукояткой 19. Какая из поверхностей 13а или 13b является охватывающей, а какая – охватываемой, определяется на этапе инженерной реализации эндоскопической системы. На фиг. 6-8 приведены, в качестве примера, возможные, но не исчерпывающие, варианты реализации поверхностей 13а и 13b. При этом, сопрягаемые фрикционные поверхности 13а, 13b механического интерфейса А могут быть размещены на торцевой поверхности валов, выполненных как сплошными, так и полыми.
В одном из вариантов реализации ведущий вал 200 и ведомый вал 100 выполнены сплошными, без сквозного отверстия, как показано в варианте реализации, изображенном на фиг. 7. При этом ведущая фрикционная поверхность 13b ведущего вала 200 является охватываемой, а ведомая фрикционная поверхность 13a ведомого вала 200 является охватывающей. В данном варианте реализации сопряжение фрикционных поверхностей происходит по существу по всей торцевой поверхности ведомого и ведущего валов 100, 200, а ведомая и ведущая фрикционные поверхности 13a, 13b имеют, например, форму части сферы, как показано на фиг. 7.
В другом варианте реализации ведущий вал 200 и ведомый вал 100 выполнены полыми с цилиндрическими, выполненными вдоль их продольной оси, сквозными отверстиями, диаметры которых у валов 100 и 200 совпадают полностью или частично (фиг. 8). В данном варианте реализации ведомая и ведущая фрикционные поверхности 13a, 13b имеют, например, форму усеченного конуса и расположены на окружной торцевой поверхности полых валов 100, 200, как показано на фиг. 8.
Во всех вариантах реализации механического интерфейса по настоящему изобретению у полых валов 100 и 200 фрикционные поверхности 13а и 13b имеют комплементарную форму и аналогичные по форме и размерам отверстия, совпадающие по размерам и форме с отверстиями в проксимальной части ведомого вала 100 и дистальной части ведущего вала 200 соответственно.
На фиг 5 и 6 приведен возможный вариант технической реализации механического интерфейса А насадки 1 и рукоятки 19. Для соединения насадки 1 с рукояткой 19 и приведения эндоскопа в рабочее состояние (фиг. 5) в дистальной части рукоятки 19 предусмотрено отверстие, поперечное сечение или профиль которого совпадает с поперечным сечением или профилем корпуса 14 насадки 1. Форма указанного профиля определяется на этапе инженерной реализации. В общем случае, корпус 14 может быть, например, цилиндром, конусом или параллелепипедом со сглаженными углами.
Соединение элементов интерфейса А происходит следующим образом: врач помещает насадку 1 в отверстие дистального конца рукоятки 19 (фиг. 6) и перемещает насадку 1 в проксимальном направлении вдоль ее продольной оси до момента фиксации насадки 1 посредством взаимодействия механизма 15 фиксации насадки 1 с механизмом 16 фиксации рукоятки 19, как было описано выше. При достижении рабочего состояния, приходят в соприкосновение сопрягаемые фрикционные поверхности 13а и 13b, так что торцевые поверхности ведущего и ведомого валов 100 и 200 образуют фрикционную пару. Поскольку, фрикционная пара реализует передачу механического управляющего воздействия от органов 5 управления рукоятки 19 к насадке 1 посредством передачи вращательного момента от ведущего вала 200 к ведомому валу 100, то исходное состояние (угловое положение валов 100 и 200 относительно друг друга) до момента их соединения или разъединения не имеет значения при передаче управляющего воздействия (крутящего момента) через механический интерфейс А (от органов 5 управления рукоятки 19 до устройства 12 преобразования насадки 1). С практической точки зрения это означает, что состояние объекта управления 4 дистального конца насадки 1 и, соответственно, текущее угловое положение ведомого вала 100 не оказывает влияние на возможность врача оперативно извлекать или присоединять насадку 1 к рукоятке 19 при любом их взаимном угловом положении друг относительно друга. Постоянный механический контакт поверхностей 13а и 13b обеспечивается механизмом 16 фиксации насадки 1 вплоть до момента извлечения насадки 1 из рукоятки 19.
Выполнение сквозных отверстий в элементах механического интерфейса А позволяет разместить внутри ведущего и ведомого валов дополнительный ведущий или ведомый вал для передачи от рукоятки 19 к объектам управления насадки 1 линейного и/или вращательного перемещения. Например, это может быть реализовано посредством дополнительного ведущего вала 21 (фиг. 10), проходящего через полый ведущий вал 200 и передающего вращательный момент, например, от электродвигателя расположенного на проксимальной части рукоятки 19 (не показан), и приводящего в движение фрезу, расположенную на дистальном конце насадки 1. Способ соединения указанных дополнительных внутренних валов в настоящем изобретении подробно не рассматривается, но, в качестве примера, на фиг. 10, 12 приведено использование шлицевого соединения 33, 34.
После передачи вращательного момента через механический интерфейс А с рукоятки 19 на ведомый вал 100 насадки 1, указанный вращательный момент с ведомого вала 100 далее поступает на вход устройства 12 преобразования механического управляющего воздействия, механически связанного с дистальной частью ведомого вала 100 (фиг. 3, 4). Задачи, решаемые устройством 12 преобразования, заключаются в преобразовании вращательного момента, получаемого ведомым валом 100 от ведущего вала 200, в линейные перемещения тяг 10, 11 управления управляемым (изгибаемым) участком съемной эндоскопической насадки 1, в обеспечении определенного коэффициента преобразования (чувствительности управления), а также в ограничении диапазона указанных линейных перемещений (ограничение диапазона управляющих воздействий). Необходимость решения указанных трех задач устройством 12 преобразования обусловлено тем, что для разных диагностических процедур врачами используются разные эндоскопы, в частности, эндоскопы с различными диаметрами трубчатого элемента 9, различной длиной и различным диаметром управляемого участка 8, различными допустимыми максимальными углами изгиба управляемого участка 8 и т.д. Например, для некоторого типа эндоскопа, для приведения участка 8 в крайнее (максимально изогнутое) положение смещение тяг 10 и 11 может составлять 5 мм, а для другого - 8 мм. При превышении этих значений может произойти поломка насадки 1 эндоскопа и/или травмирование пациента. Поскольку с одной рукояткой 19 согласно настоящему изобретению могут использоваться различные типы эндоскопов, то механизм управления, расположенный в рукоятке 19, не содержит ограничивающих вращение органа 17 управления элементов. Соответственно, указанное ограничение должно быть реализовано в съемной насадке 1. Кроме того, при разработке любого типа эндоскопа устройство 12 преобразования должно реализовывать необходимую чувствительность управления, обеспечивающее врачу комфортное использование этого типа эндоскопа. Как и в случае с перемещением тяг 10 и 11, механизм управления, расположенный в рукоятке 19, не имеет элементов изменения передаточного числа механических управляющих воздействий, и задача обеспечения требуемой чувствительности для конкретного типа эндоскопа решается согласно настоящему изобретению в устройстве 12 преобразования механических управляющих воздействий насадки 1.
Возможный вариант технической реализации устройства 12 преобразования механических управляющих воздействий приведен на фиг. 11. Вращательный момент от ведомой части механического интерфейса А, а именно от ведомого вала 100, передается на жестко связанное с ведомым валом 100 цилиндрическое тело 29, на котором выполнены две винтовые или резьбовые канавки 22 и 26 с левым и правым направлением резьбы соответственно. Цилиндрическое тело 29 и вал 100 соединены соосно, а между ними расположена ограничительная пластина 31, роль которой может выполнять дистальная часть вала 100. Винтовые элементы 23 и 25 с внутренней резьбой, соответствующей резьбовым канавкам 22 и 26 соответственно, образуют с соответствующими винтовыми канавками 22 и 26 винтовые пары. Винтовые элементы 23 и 25 являются подвижными и при вращении цилиндрического тела 29 с ведомым валом 100 разнонаправленно перемещаются вдоль продольной оси цилиндрического тела 29. С винтовыми элементами 23 и 25 неподвижно связаны элементы 27 и 28 крепления тяг 10 и 11 соответственно, которые выполнены с возможностью линейного перемещения в направляющих пазах 35, выполненных в неподвижных ограничительных пластинах 30 и 24. Таким образом, вращение ведомого вала 100 приводит к разнонаправленному поступательному движению винтовых элементов 23 и 25 относительно цилиндрического тела 29, которое, через элементы крепления 27 и 28, передается на тяги 11 и 10. Шаг винтовых канавок 22 и 26 определяет чувствительность управления объектом 4 управления насадки 1. Длина винтовых канавок 26 и 22 и наличие ограничительных пластин 24, 30 и 31, установленных с возможностью вращения относительно цилиндрического тела 29, но без возможности перемещения вдоль оси 400, определяет диапазон перемещения винтовых элементов 25 и 23 и, соответственно, тяг 10 и 11. В наиболее простом варианте осуществления пластины 24, 30 представляют собой шайбы, насаженные на вал цилиндрического тела 29. Это, в свою очередь, задает возможный диапазон механических управляющих воздействий, передаваемых на объект управления, в частности, возможный диапазон углов поворота управляемого (изгибаемого) участка съемной насадки 1.
На фиг. 12 изображен вариант реализации устройства 12 преобразования управления с использованием дополнительного ведомого вала 32, выполненного с возможностью вращения. Ведущим валом для дополнительного ведомого вала 32 является дополнительный ведущий вал 21 рукоятки 19, показанный на фиг. 10. В этом варианте реализации в вале 100, фрикционной поверхности 13a и в цилиндрическом теле 29 вдоль их общей продольной оси выполнено сквозное отверстие, через который проходит соосно с ними дополнительный ведомый вал 32. При присоединении насадки 1 и рукоятки 19, помимо фрикционных элементов механического интерфейса А, в состояние соединения (сопряжения) в рабочем состоянии эндоскопа приходят также шлицевые соединения 33, 34 дополнительного ведомого вала 32 (фиг. 12) и дополнительного ведущего вала 21 (фиг. 10), благодаря чему осуществляется передача вращательного момента, например, от электродвигателя, присоединенного к рукоятке 19, например, к фрезе, размещенной на дистальном конце насадки 1, при этом вращение ведомых валов 100 и 32 осуществляется независимо.
В другом варианте изобретения внутренний дополнительный ведомый вал 32 может быть выполнен с возможностью совершать линейные перемещения и приводить в движение, например, систему рычагов хирургических ножниц, расположенных на дистальном конце насадки 1.
На фиг. 13 представлено изображение примера образующей кривой abdef для охватывающей фрикционной поверхности 13a. Указанная образующая в данном варианте реализации состоит из прямолинейных отрезков ab, de и ef, и сопрягаемого с ними криволинейного отрезка bd.
На фиг. 14 представлены примеры образующих кривых сопрягаемых фрикционных поверхностей ведущей и ведомой частей механического интерфейса. В общем случае образующая a1b1 охватывающей фрикционной поверхности 13a и образующая a2b2 охватываемой фрикционной поверхности 13b конгруэнтны и являются гладкими монотонными функциями, но могут состоять и из монотонных отрезков, то есть быть гладкими кусочно-монотонными функциями.
Является ли функция, описывающая образующую кривую, монотонно убывающей или возрастающей, определяется выбором того, какая из поверхностей 13a или 13b является охватывающей. Например, если ось абсцисс направлена дистально, а поверхность 13a является охватывающей, то указанная функция является убывающей, а касательная he к описанной конической поверхности (или ее образующей) может иметь вид, представленный на фиг. 14.
В предпочтительном варианте реализации образующие поверхностей 13a и 13b конгруэнтны и представляют из себя отрезок или дугу, соответственно образующие при своем вращении вокруг оси 400 или 500 конус, в частности усеченный конус, или часть сфероида или параболоида, в частности усеченного.
В другом варианте изобретения построить описанную коническую поверхность не представляется возможным, и образующие могут иметь, например, вид, представленный на фиг. 16. Иными словами, сопрягаемые поверхности имеют вид дисков с концентрическими «впадинами». Причем, «выступам» J1K1L1M1 одного диска соответствуют «впадины» J2K2L2M2 на другом диске. Вместе с тем, вокруг каждого «выступа» может быть описана конусная (предпочтительно. усеченная) поверхность, конгруэнтная конусной поверхности, вписанной в «впадину», соответствующей этому «выступу», для сохранения свойства самоцентрирования валов 100 и 200 при их соединении. Профиль «впадины» и «выступа» может определяться кусочно-линейной функцией, как показано на фиг.16, или непрерывной кривой, или комбинацией отрезка(ов) и кривой(ых). Количество пар «впадина»-«выступ» не ограничено, при этом требований к их регулярности, т.е. равного приращения радиусов у соседних пар «впадина»-«выступ», в общем случае нет.
На фиг. 15 изображены сопрягаемые части валов одного из вариантов реализации механического интерфейса по настоящему изобретению, изображенные на фиг. 8, с обозначением образующих, использованном на фиг. 14, в предпочтительном варианте реализации при выполнении в валах 100 и 200 отверстий. В данном случае образующие сопрягаемых фрикционных поверхностей 13a и 13b представляют собой прямолинейные отрезки a1b1 и a2b2 соответственно, а сопрягаемые фрикционные поверхности 13a и 13b представляют собой усеченные конусы. Однако, прямолинейность образующих в общем случае не является обязательной. Принципиальным с точки зрения настоящего изобретения является монотонность вдоль осей 400, 500 функции, описывающей образующие кривые, а также по меньшей мере частичная конгруэнтность сопрягаемых фрикционных поверхностей или соответствующих описанных поверхностей ведомой и ведущих частей механического интерфейса так, что обеспечивается надежное фрикционное взаимодействие ведущей и ведомой фрикционных поверхностей между собой в рабочем состоянии эндоскопа, а также самоцентрирование соединяемых между собой съемной эндоскопической насадки с рукояткой эндоскопа.
В настоящем описании изобретение описано на примере вариантов реализации, которые не следует трактовать как ограничительные. Для специалиста очевидно, что возможны изменения и модификации, не выходящие за рамки объема настоящего изобретения, который определяется нижеследующей формулой изобретения.
Перечень условных обозначений:
А – механический интерфейс управления
B, C, D – электронные интерфейсы
1 - съемная эндоскопическая насадка
2 – основная часть (рукоятка)
3 - устройство обработки и отображения видеосигнала
4 – объект управления (управляемый элемент)
5 – орган (или органы) механического управления
6 – орган (или органы) электронного управления (кнопки)
7 – видеоголовка эндоскопической насадки
8 – управляемый (изгибаемый) участок эндоскопической насадки
9 – трубчатый элемент
10 - тяга управления
11 - тяга управления
12 - устройство (механизм) преобразования механических управляющих воздействий
13a – охватывающая фрикционная поверхность ведомого вала 100
13b охватываемая фрикционная поверхность ведущего вала 200
14 - корпус эндоскопической насадки
15 - средства разъемной фиксации
16 - механизм фиксации
17 - поворотный орган управления (колесо)
18 - рычажный орган управления (рычаг)
19 - рукоятка
20 - промежуточные шестерни
21 - дополнительный ведущий вал
22 - винтовые канавки
23 - винтовой элемент
24 - неподвижная ограничительная пластина
25 - винтовой элемент
26 - винтовые канавки
27 - элемент крепления тяги
28 - элемент крепления тяги
29 - цилиндрическое тело
30 – неподвижная ограничительная пластина
31 - ограничительная пластина
32 – дополнительный ведомый вал
33 - шлицевое соединение
34 - шлицевое соединение
35 – направляющий паз
100 - ведомый вал
200 - ведущий вал
300 – продольная ось насадки
400 - ось вращения ведомого вала
500 – ось вращения ведущего вала
abdef - образующая кривая
a1b1 – образующая кривая
a2b2 – образующая кривая
he - касательная
J1K1L1M1 - выступы
J2K2L2M2 - впадины
Способ лечения сенсорных нарушений слуха, сопровождающихся ухудшением восприятия речи
Модульная видеоэндоскопическая система
Модульная видеоэндоскопическая система
Медицинский диагностический прибор со съемными дистальными насадками
Разъем для медицинского диагностического прибора
Медицинский диагностический прибор со съемными дистальными насадками
Способ хирургического лечения хронических дефектов перегородки носа у взрослых

