Результат интеллектуальной деятельности: КОНТРОЛЬ СОСТОЯНИЯ КРЕПЛЕНИЯ ЗЕМЛЕРОЙНЫХ ИНСТРУМЕНТОВ НА ТЯЖЕЛОМ ОБОРУДОВАНИИ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к контролю состояния землеройных инструментов (Ground Engaging Tools, GET), прикрепленных к тяжелому оборудованию, такому как ковш шахтного погрузчика, и, в частности, хотя и не исключительно, к электронной системе контроля и связи для предотвращения нежелательного отсоединения и потери инструментов GET во время эксплуатации.
Предпосылки создания изобретения
Машины для подземных горных работ функционируют в чрезвычайно жесткой окружающей обстановке и, как правило, подвергаются значительным нагрузкам и напряжениям. Соответственно, такие горные машины содержат сменные изнашиваемые детали, которые могут быть оптимизированы по сроку службы и могут заменяться при износе или повреждении. Например, обычно ковш шахтного погрузчика снабжен множеством инструментов GET в виде сменных зубьев, прикрепленных к передней режущей кромке или острому краю ковша. Традиционно, инструменты GET приваривались к режущей кромке ковша, и по истечении срока их службы удаление с режущей кромки достигалось с помощью занимающего много времени и трудоемкого процесса вырезания.
В последнее время были предложены системы механического соединения для облегчения замены изнашиваемых инструментов GET, как описано в документах WO 2010/065990 и WO 2014/037780. Однако нередко существующие механические соединения преждевременно изнашиваются или повреждаются из-за сил высокой ударной нагрузки, приводящих к отсоединению инструмента GET. В таких ситуациях нормальная работа останавливается, так как часто выполняется ручной поиск, чтобы попытаться найти потерянный инструмент GET. Кроме того, требуется дополнительное время и усилия для повторного закрепления или установки нового инструмента GET на тяжелом оборудовании.
Особая проблема с потерянными и не обнаруженными инструментами GET - это засорение сыпучего материала, который извлекается и впоследствии перерабатывается (например, дробилкой). Понятно, что попадание недробимого инструмента GET в дробилку может привести к значительному повреждению и простою машины. В связи с этим были предложены системы для обнаружения отсоединенных инструментов GET, чтобы попытаться предотвратить прерывание последующей переработки материала. В частности, в документе WO 2012/116408 описана система для обнаружения потери компонента GET в горной или землеройной машине. Система содержит радиочастотную идентификационную (Radio Frequency Identification, RFID) метку, прикрепляемую к компоненту GET. На выходных воротах, окружающих площадку, предусматривается одна или несколько станций считывания меток, так что засоренный инструментом GET сыпучий материал, проходящий через ворота, сканируется, чтобы обеспечить идентификацию и удаление инструмента GET перед дальнейшей переработкой. Дополнительные примеры систем обнаружения инструмента GET описаны в документах US 2013/0049935, US 2003/0112153, US 2015/0149049, WO 2012/107848 и CN 204001039.
Однако существующие системы обнаружения инструмента GET ограничены обнаружением отсоединенных инструментов GET. В частности, инструмент GET, глубоко закопанный в извлеченный сыпучий материал, может быть трудно распознаваемым и может проходить далее по ходу потока незамеченным. Кроме того, такие системы не решают проблему трудозатрат и времени, необходимых для ремонта и/или повторного закрепления потерянного инструмента GET на тяжелом оборудовании. Соответственно, требуется система обнаружения/контроля инструмента GET, которая решает вышеуказанные проблемы.
Сущность изобретения
Целью настоящего изобретения является предложить систему для контроля состояния крепления землеройного инструмента (GET) на горной, землеройной или перерабатывающей породу машине, сконфигурированную для вывода состояния крепления инструмента GET на тяжелом оборудовании в режиме реального времени (то есть, когда машина эксплуатируется). Еще одной конкретной целью является создание системы контроля, чувствительной к состоянию крепления инструмента GET, чтобы предупреждать персонал об ослаблении крепления или частичном отказе механического присоединения инструмента GET к тяжелому оборудованию. Соответственно, главной целью настоящего изобретения является создание системы, позволяющей избежать нежелательного повреждения механизма крепления инструмента GET и непреднамеренного отсоединения инструмента GET на горной, землеройной или перерабатывающей породу машине.
Эти цели достигаются с помощью системы контроля состояния крепления инструмента GET, в которой на инструменте GET установлен датчик близости, и он сконфигурирован для определения близости инструмента GET относительно участка горной, землеройной или перерабатывающей породу машины, к которому крепится инструмент GET. Такой датчик выполнен с возможностью передачи данных в реальном времени на подходящий приемник, чтобы обеспечить контроль состояния соединения в реальном времени. Такой контроль состояния может быть качественным или количественным по отношению к заранее заданному и необходимому состоянию соединения. Настоящее изобретение может быть реализовано с помощью технологии типа RFID, в которой RFID-метка, соединенная с инструментом GET, способна передавать данные датчика в приемник для прямого вывода персоналу и/или последующей передачи в сеть или на центральный узел.
Настоящая система может быть сконфигурирована как локальная сеть или локализованная система контроля состояния крепления инструмента GET, специфичная для конкретной машины, такой как шахтный погрузчик. В частности, набор инструментов GET, смонтированных на режущей кромке ковша погрузчика, может соответственно образовывать пару с одним приемником, монтируемым в кабине погрузчика, причем каждый инструмент GET содержит RFID-метку, способную к одно- или двусторонней связи с приемником, смонтированным в кабине. Образование пар приемника и меток (реализуемое, например, с помощью передачи пароля или кода) обеспечивает то преимущество, что каждая отдельная машина-погрузчик содержит "автономную" систему контроля состояния соединения инструмента GET, которая не зависит от других эксплуатируемых машин в этой же окружающей среде. Этот тип конфигурации локальной сети для конкретной машины выгоден для оптимизации чувствительности системы контроля/обнаружения и для обеспечения надежной и эффективной системы с точки зрения рабочих компонентов, их функций и каналов связи.
Настоящее изобретение имеет дополнительное преимущество благодаря конфигурации машинной/локализованной системы контроля инструмента GET, в которой каждая система может быть сконфигурирована так, чтобы быть чувствительной к отсоединенным инструментам GET других машин, если это необходимо. Таким образом, посредством конфигурации специфичных для машины приемников множества машин, можно сконфигурировать несколько машин так, чтобы они были чувствительны к отсоединенным инструментам GET соседних машин, и увеличить вероятность восстановления работоспособности. Настоящее изобретение может быть реализовано с использованием технологии типа RFID, в которой отдельные инструменты GET способны передавать данные датчика состояния посредством беспроводной связи в электронный приемник в необходимых и оптимизированных диапазонах радиочастот, соответствующих рабочей среде, такой как шахта.
В соответствии с первым аспектом настоящего изобретения предлагается система для контроля состояния крепления землеройного инструмента (GET) на горной, землеройной или перерабатывающей породу машине, причем система содержит: по меньшей мере один инструмент GET, монтируемый с возможностью отсоединения на крепежном участке горной, землеройной или перерабатывающей породу машины; по меньшей мере один датчик близости, установленный на инструменте GET и сконфигурированный для определения близости инструмента GET относительно крепежного участка горной, землеройной или перерабатывающей породу машины, на которую монтируется инструмент GET; и передатчик, установленный на инструменте GET, для беспроводной передачи данных о близости в приемник, расположенный удаленно от инструмента GET.
Опционально, инструмент GET содержит первую часть механического соединения, а крепежный участок содержит вторую часть механического соединения, причем инструмент GET может быть установлен с возможностью съема на крепежном участке посредством сочленения первой части и второй части. Первая часть может содержать в целом твердое тело, имеющее область внутренней полости, которое образует "кожух", способный по меньшей мере частично проходить над крепежным участком. Вторая часть может содержать бобышку, лапку или выступ, который может быть размещен внутри полости кожуха. Первая часть и вторая часть могут быть сочленены вместе посредством механизма механического соединения, как описано в документе WO 2014/037780, содержание которого включено в настоящий документ посредством ссылки. Такое механическое соединение обеспечивает удобное крепление и замену инструментов GET на крепежном участке.
Опционально, датчик близости содержит любой один или комбинацию из следующего набора компонентов: индуктивного компонента, емкостного компонента, компонента датчика близости. Предпочтительно, индуктивный компонент представляет собой индуктивный датчик, который может содержать электронные компоненты, такие как по меньшей мере один конденсатор, по меньшей мере одну катушку индуктивности, по меньшей мере один датчик близости и/или датчик нагрузки или тензодатчик, сконфигурированный для измерения деформации в инструменте GET. Когда датчик представляет собой тензодатчик, заявленное изобретение способно выводить рассчитанное напряжение на основе контроля деформации.
Предпочтительно инструмент GET содержит электронную метку, причем на метке установлен датчик близости. Предпочтительно метка содержит любой один или комбинацию из следующего набора компонентов: печатной платы; процессора; средства хранения данных; приемопередатчика; антенны. Опционально, приемопередатчик содержит радиочастотный приемопередатчик и/или приемопередатчик по стандарту Bluetooth. Предпочтительно, настоящая система использует технологию RFID-меток для создания системы, адаптируемой к различным рабочим условиям с учетом рабочей частоты и диапазона передачи частот.
Предпочтительно, система дополнительно содержит блок активации, имеющий печатную плату, процессор и приемопередатчик, причем блок активации сконфигурирован для беспроводной связи с электронной меткой. Предпочтительно, блок активации представляет собой портативное устройство, которое может быть расположено в непосредственной близости от электронной метки, чтобы активировать метку для ее использования и, в частности, для перевода метки из исходного "заводского режима" в полнофункциональный "рабочий режим". Предпочтительно, чтобы блок активации и электронная метка были сконфигурированы для связи в диапазоне ультравысоких частот (Ultra High Frequency, UHF) и/или стандарта Bluetooth. Предпочтительно, блок активации сконфигурирован для проводной или беспроводной связи со вспомогательными компьютерными объектами, такими как компьютер, персональный цифровой помощник (Personal Digital Assistant, PDA) и тому подобными. Предпочтительно, блок активации сконфигурирован для приема данных с помощью системы связи Bluetooth и затем для передачи данных в метку с помощью связи в диапазоне UHF. Опционально, электронная метка может быть сконфигурирована для любого вида проводной или беспроводной связи. Такая беспроводная связь может включать в себя любой тип электромагнитной беспроводной технологии, охватывающей радиочастоты, и другие виды связи, такие как система по технологии долгосрочного развития (Long Term Evolution, LTE), усовершенствованная LTE, Wi-Fi и Bluetooth. Метка также может работать с использованием технологии радиочастотной связи, включая любые радиодиапазоны Международного союза электросвязи, например, очень низкие частоты (Very Low Frequency, VLF), низкие частоты (Low Frequency, LF), средние частоты (Medium Frequency, MF), высокие частоты (High Frequency, HF), очень высокие частоты (Very High Frequency, VHF), ультравысокие частоты (UHF), сверхвысокие частоты (Superhigh Frequency, SHF), крайне высокие частоты (Extremely High Frequency, EHF) или чрезвычайно высокие частоты (Tremendously High Frequency, THF). Соответственно, когда настоящее изобретение содержит приемник и, опционально, блок активации, такие компоненты могут быть аналогичным образом выполнены с возможностью осуществления этих видов беспроводной связи посредством их электронных компонентов и, в частности, компонентов связи, таких как приемопередатчики.
Опционально, блок активации может быть вспомогательным компьютерным объектом, таким как компьютер, персональный цифровой помощник (PDA), мобильный телефон и тому подобным. Опционально, блок активации может быть электронным компонентом, размещаемым на трассе передачи данных между инструментом GET (меткой) и вспомогательным компьютерным объектом, таким как помощник PDA.
Предпочтительно, электронная метка заключена в корпус, оболочку, герметизирующий материал или, в частности, материал на основе полимера, чтобы защитить метку от абразивного износа или повреждения, связанного с ударом, и обеспечить герметичное покрытие для предотвращения проникновения влаги. Опционально, материал на полимерной основе содержит силиконовый материал или эпоксидную смолу, предназначенную для герметизации, размещения и защиты электронных компонентов от влаги в дополнение к приклеиванию метки к инструменту GET.
Предпочтительно, приемник содержит печатную плату, процессор, приемопередатчик и средства хранения данных. Более предпочтительно, приемник дополнительно содержит акселерометр, экран дисплея и антенну. Приемник может дополнительно содержать дополнительные электронные компоненты для обеспечения проводной или беспроводной связи между приемником и другими компонентами более крупной сети или компьютерными объектами, такими как сервер, компьютер, PDA и т.п. Предпочтительно, приемник дополнительно содержит интерфейс пользователя, содержащий экран дисплея для вывода данных о близости (или информации, основанной на данных о близости) и, опционально, данных дополнительного датчика или информации, основанной на одном из датчиков, установленных на машине. Такие данные датчика могут включать в себя данные акселерометра, включая, в частности, данные акселерометра, относящиеся к части машины, к которой прикреплен инструмент GET, включая перемещение по высоте, горизонтальное/вертикальное перемещение, угловое перемещение и ускорение или замедление части машины, к которой прикреплен инструмент GET. В частности, интерфейс пользователя (или экран дисплея) сконфигурирован для вывода угловой ориентации инструмента GET, соответствующей наклону или отклонению части машины, к которой прикреплен инструмент GET.
Опционально, крепежный участок является передней кромкой экскавационного ковша землеройной машины. Опционально, крепежный участок представляет собой участок компонента молотка, бурового компонента, измельчающего компонента, образующего часть устройства для добычи, разработки карьера, переработки или дробления породы. Опционально, метка контроля состояния в соответствии с заявленным изобретением может быть смонтирована на любом участке или компоненте устройства для землеройных работ или для переработки породы, включая, например, монтаж на экскавационном ковше, транспортном средстве, двигателе, коробке передач, бункере, конвейере, защитной облицовке, износостойкой пластине, дробильной чаше, буровой штанге, переходной муфте хвостовика бура, головке бура, ведущем переводнике, корпусе бурильного молотка или другом промежуточном компоненте бурильной колонны, образующем ее часть.
Опционально, инструмент GET дополнительно содержит один или комбинацию из следующего набора датчиков: датчика температуры; датчика состояния износа инструмента GET; акселерометра; датчика электрического напряжения. Опционально, датчик состояния износа содержит резистивный провод или фольгу, которые могут быть полностью или по меньшей мере частично встроены в инструмент GET. Опционально, датчик состояния износа содержит провод или фольгу высокого сопротивления, проходящую через корпус инструмента GET от обращенной наружу поверхности к внутреннему участку или обращенной внутрь поверхности (то есть в области полости инструмента GET). Опционально, датчик состояния износа может содержать ультразвуковой датчик, сконфигурированный для определения относительной толщины и/или профиля корпуса инструмента GET, чтобы позволить выполнить определение состояния износа. Такой ультразвуковой датчик может работать в периодическом режиме, не зависящем от работы других датчиков, чтобы обеспечить энергосбережение. Опционально, ультразвуковой датчик может работать периодически два раза в день, один раз в день или один раз каждые два или три дня. Такая конфигурация полезна для предоставления данных о состоянии износа, поскольку объем материала, который формирует инструмент GET, уменьшается, когда инструмент GET изнашивается во время нормальной эксплуатации.
В соответствии со вторым аспектом настоящего изобретения, предлагается способ контроля состояния крепления землеройного инструмента (GET) на горной, землеройной или перерабатывающей породу машине, согласно которому: предоставляют датчик близости на инструменте GET, монтируемом с возможностью отсоединения на горной, землеройной или перерабатывающей породу машине; определяют близость инструмента GET относительно крепежного участка горной, землеройной или перерабатывающей породу машины, на которой смонтирован инструмент GET; осуществляют беспроводную передачу данных о близости, генерируемых датчиком, в приемник, расположенный удаленно от инструмента GET; и хранение, вывод и/или обработку данных о близости в приемнике для контроля состояния крепления инструмента GET на основании данных о близости.
Предпочтительно система дополнительно содержит вывод данных о близости или информации, основанной на данных о близости, в приемнике. Опционально, данные о близости могут передаваться в приемник в соответствии с одним или несколькими событиями определения, порядка одного раза в миллисекунду, в секунду или в минуту. Опционально, система конфигурируется так, что данные датчика передаются в приемник в диапазоне от 1-5 раз в секунду до 1-5 раз каждые тридцать секунд. Опционально, датчик выполнен с возможностью генерировать данные датчика близости в диапазоне от одного события в секунду до одного события в десять секунд.
Предпочтительно, электронная метка выполнена с возможностью передачи данных идентификации метки в приемник так, что электронная метка и приемник образуют коммуникационную пару; при этом в режиме нормальной эксплуатации приемник принимает исключительно передачу данных о близости от электронной метки, привязанной к данной горной, землеройной или перерабатывающей породу машине, а не от несвязанных с ней электронных меток на других горных, землеройных или перерабатывающих породу машинах. Ссылка в описании изобретения на "образующие коммуникационную пару" охватывает передачу данных, связанную с защитой кодом или паролем, так что данные от датчика принимаются и обрабатываются, сохраняются или выводятся в приемнике только в том случае, если эти данные датчика сопровождаются распознанными данными идентификации (Identification, ID) метки, которые подтверждают, что электронная метка связана с инструментом GET на той горной, землеройной или перерабатывающей породу машине, которая находится в заранее назначенной "локальной сети" горной, землеройной или перерабатывающей породу машины, причем такая сеть содержит по меньшей мере один инструмент GET и образующий с ним коммуникационную пару приемник. Предпочтительно, и в одной реализации, образование коммуникационной пары между электронной меткой и приемником достигается посредством системы на основе кода замок-ключ, в которой каждый пакет данных, передаваемый из инструмента GET, содержит данные кода, которые распознаются приемником.
Предпочтительно, способ дополнительно включает, перед генерацией данных о близости, активацию электронной метки с использованием блока активации, сконфигурированного для беспроводной связи с электронной меткой. Предпочтительно беспроводная связь между блоком активации и электронной меткой представляет собой связь по стандарту Bluetooth или в диапазоне UHF. Опционально, беспроводная связь с меткой использует адаптивную скачкообразную перестройку частоты (Adaptive Frequency Hopping, AFH) для обеспечения связи с низким энергопотреблением и средства предотвращения или минимизации помех связи.
Опционально, этап активации электронной метки включает передачу данных активации в электронную метку, причем данные активации содержат любые одни или комбинацию из следующего набора данных: данных идентификации ID, относящихся к инструменту GET, окружающей среде, в которой должны работать инструмент GET, и/или машины, на которую монтируется инструмент GET; положение инструмента GET на машине, на которую монтируется инструмент GET; данных параметров связи, позволяющих электронной метке осуществлять связь с приемником; данных конфигурации для установки рабочей конфигурации электронной метки. Такой обмен данными может выполняться в виде беспроводной или проводной связи между электронной меткой, блоком активации и/или третьим компонентом хранения или передачи данных, таким как компьютер, сеть, облачная структура, узел, помощник PDA.
Предпочтительно, способ дополнительно включает предоставление на инструменте GET любого одного или комбинации из следующего набора датчиков: датчика температуры; датчика состояния износа инструмента GET; акселерометра; датчика напряжения; а также определение в инструменте GET и передачу в приемник любого одного или комбинации из следующего набора характеристик: температуры инструмента GET; состояния износа инструмента GET; наклона/отклонения инструмента GET; ускорения/замедления инструмента GET; угла наклона инструмента GET; перемещение инструмента GET в горизонтальной/вертикальной плоскости; деформации или напряжения в инструменте GET; состояния удара инструмента GET; электрического напряжения на любом одном или комбинации датчиков.
Предпочтительно, способ дополнительно включает вывод данных о близости или информации на основе данных о близости в сеть или средства хранения данных, такую как облачная структура, посредством проводной или беспроводной связи. Предпочтительно, данные о близости обрабатываются процессором на борту приемника так, что система содержит необработанные данные о близости и обработанные данные о близости, причем обработанные данные о близости предпочтительно выводятся в приемнике. Выводимые данные о близости могут выражаться визуально, акустически или тактильно. Предпочтительно, данные выводятся графически и/или численно, указывая на состояние крепления инструмента GET на машине.
Предпочтительно, способ дополнительно конфигурируется так, что в ответ на механическое отсоединение инструмента GET от крепежного участка приемник конфигурируется для передачи по меньшей мере одному соседнему приемнику (в той же рабочей среде) сигнала для разрешения упомянутому соседнему приемнику(-ам) принимать и обрабатывать сигнал, передаваемый от инструмента GET, который отсоединился. Предпочтительно, соседние приемники конфигурируются для связи с приемником машины, от которой инструмент GET отсоединился, и для уведомления этого приемника о том, что был принят сигнал отсоединившегося инструмента GET. Такая система полезна для как можно более быстрой идентификации и определения местоположения отсоединившегося инструмента GET с использованием соседних машин для приема данных от отсоединившегося инструмента GET. Такая система описана в данном документе со ссылкой на генерацию и обработку сигнала SOS (тревоги).
В соответствии с еще одним аспектом настоящего изобретения, предлагается система для контроля характеристики состояния каждого из набора землеройных инструментов (GET), монтируемых на горной, землеройной или перерабатывающей породу машине, причем система содержит: множество инструментов GET, монтируемых к соответствующим крепежным участкам на горной, землеройной или перерабатывающей породу машине; набор RFID-меток, причем каждая метка имеет по меньшей мере один датчик для определения характеристики состояния каждого соответствующего инструмента GET; приемник для приема данных от RFID-меток; причем каждая из RFID-меток содержит данные идентификации ID для привязки RFID-метки к конкретной горной, землеройной или перерабатывающей породу машине; при этом приемник и RFID-метки сконфигурированы так, что они образуют коммуникационные пары, так что в режиме нормальной эксплуатации упомянутый приемник принимает исключительно передачу данных от упомянутых RFID-меток, привязанных к упомянутой горной, землеройной или перерабатывающей породу машине, а не от не привязанных к ней RFID-меток.
В соответствии с еще одним аспектом настоящего изобретения предлагается способ контроля характеристики состояния каждого из набора землеройных инструментов (GET), монтируемых на горной, землеройной или перерабатывающей породу машине, причем способ включает этапы на которых: предоставляют множество инструментов GET, монтируемых к соответствующим крепежным участкам на горной, землеройной или перерабатывающей породу машине; снабжают каждый инструмент GET из набора инструментов GET RFID-меткой, каждая из которых имеет по меньшей мере один датчик; выполняют определение характеристики состояния каждого из инструментов GET посредством каждого соответствующего датчика; выполняют передачу каждой RFID-меткой данных о состоянии инструмента GET в приемник, который образует коммуникационную пару с RFID-метками, чтобы в режиме нормальной эксплуатации принимать данные о состоянии инструмента GET от упомянутых RFID-меток и игнорировать данные от не образующих с ним коммуникационную пару RFID-меток.
В соответствии с еще одним аспектом настоящего изобретения предлагается система для контроля характеристики состояния землеройного инструмента (GET) на горной, землеройной или перерабатывающей породу машине, причем система содержит: инструмент GET, механически прикрепляемый к крепежному участку горной, землеройной или перерабатывающей породу машины; по меньшей мере одну метку, предоставленную на инструменте GET, причем метка имеет по меньшей мере один датчик, процессор и передатчик для беспроводной передачи данных о состоянии инструмента GET на основе сигналов, генерируемых датчиком; приемник, сконфигурированный для беспроводного приема данных о состоянии инструмента GET от метки; причем метка по меньшей мере содержит данные ID, чтобы привязывать метки к приемнику так, чтобы приемник и метка образовывали коммуникационную пару, и приемник сконфигурирован для приема при нормальной эксплуатации исключительно данных о состоянии инструмента GET от метки, имеющей распознаваемую идентификацию ID, и игнорирования данных о состоянии инструмента GET от других меток.
Ссылка в данном описании на "характеристику состояния" инструмента GET охватывает температуру инструмента GET; состояние износа инструмента GET; перемещение инструмента GET; перемещение инструмента GET в горизонтальной/вертикальной плоскости; наклон/отклонение инструмента GET; ускорение/замедление инструмента GET; угол наклона инструмента GET; деформацию или напряжение в инструменте GET; состояние удара инструмента GET; электрическое напряжение, измеряемое посредством датчика на электронной метке, установленной на инструменте GET, и/или любую другую физическую или механическую характеристику.
В соответствии с еще одним аспектом настоящего изобретения предложен землеройный инструмент (GET), монтируемый на горной, землеройной или перерабатывающей породу машине, причем инструмент GET содержит: основную часть, имеющую землеройный участок для внедрения в грунт и крепежный участок для крепления инструмента GET на горной, землеройной или перерабатывающей породу машине; RFID-метку, прикрепленную к инструменту GET, причем метка содержит: печатную плату; процессор; антенну; батарею; и по меньшей мере один датчик, включая датчик близости для определения близости инструмента GET относительно участка горной, землеройной или перерабатывающей породу машине, к которому крепится инструмент GET.
Краткое описание чертежей
Далее будет описана конкретная форма осуществления настоящего изобретения, только в качестве примера и со ссылкой на прилагаемые чертежи, на которых:
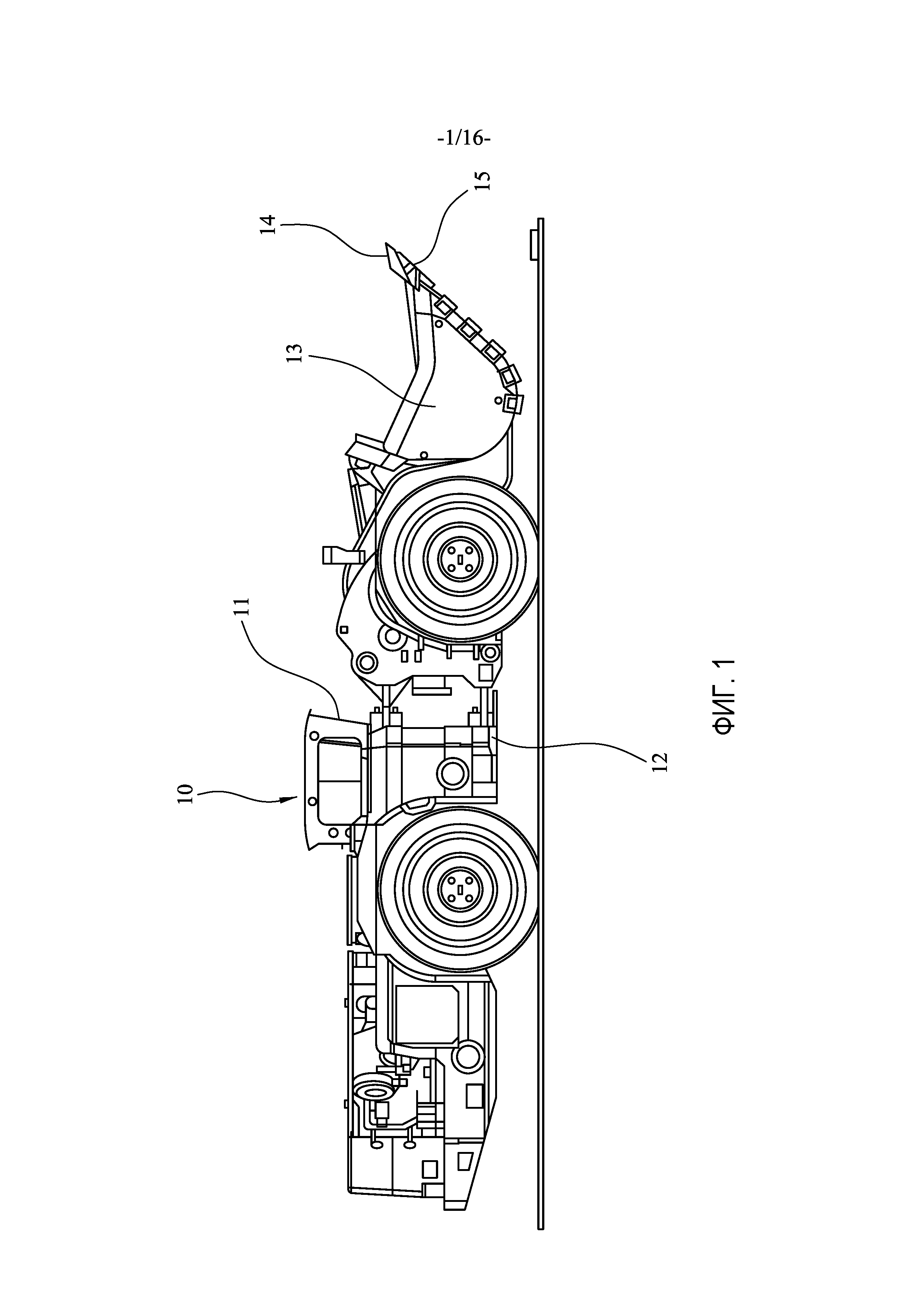
Фиг. 1 представляет собой вид сбоку шахтного погрузчика для горной машины, содержащего узел экскавационного ковша с множеством землеройных зубьев (Ground Engaging Teeth, GET).
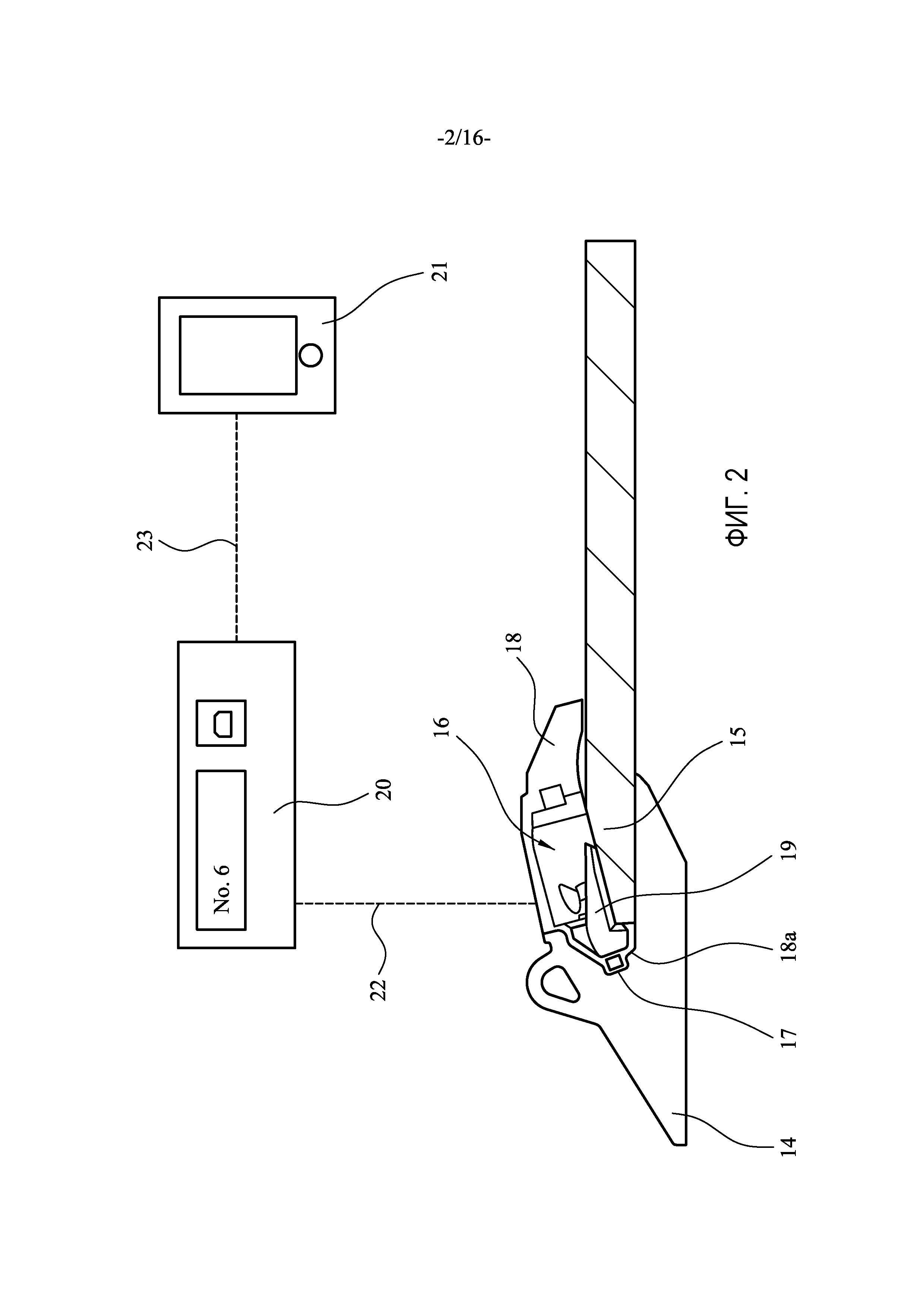
Фиг. 2 представляет собой схему монтажа зуба GET на режущей кромке ковша шахтного погрузчика по фиг. 1, причем зуб GET имеет электронную RFID-метку, сконфигурированную для беспроводной связи с блоком активации RFID, в соответствии с конкретной реализацией настоящего изобретения.
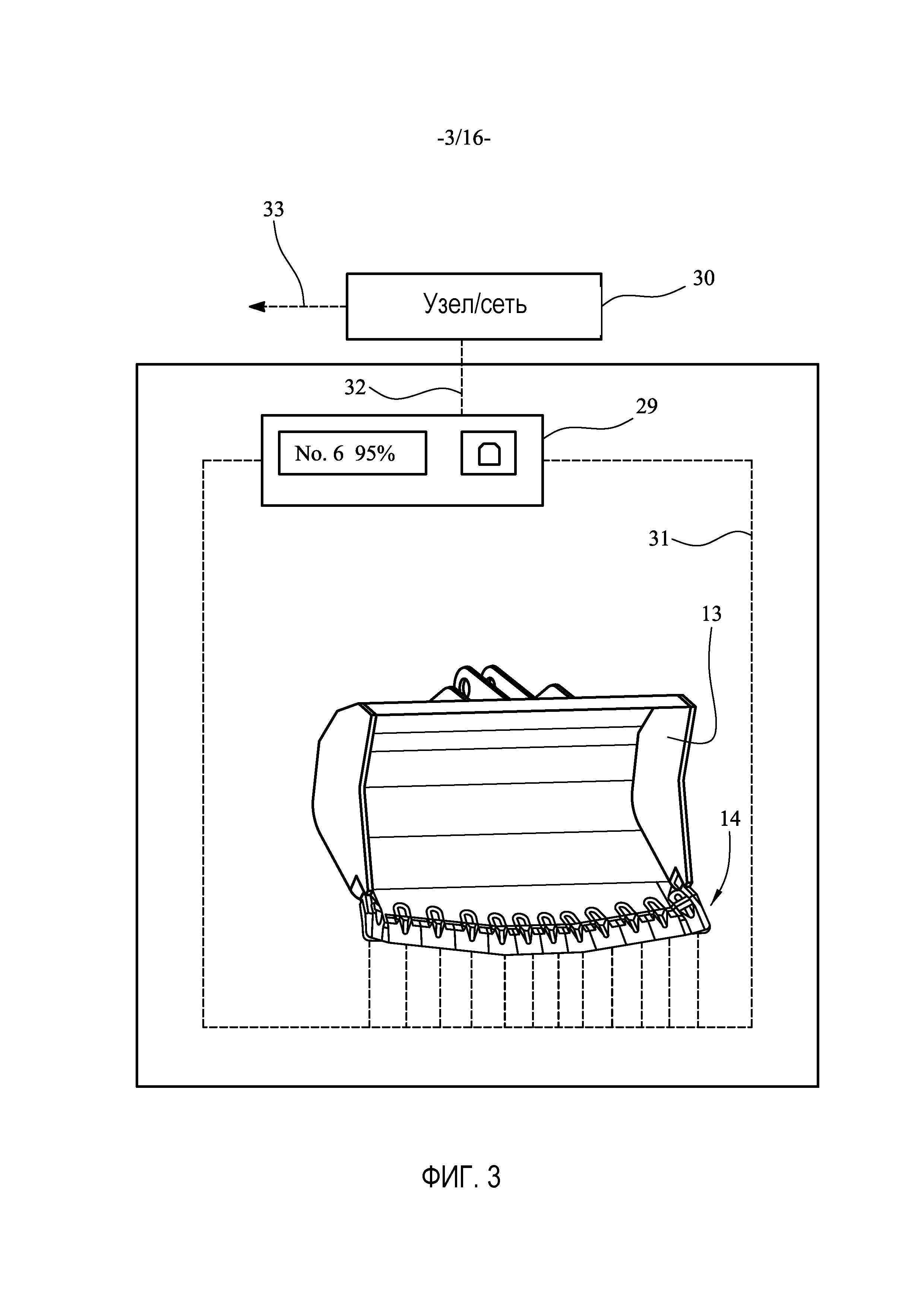
Фиг. 3 - схема беспроводной связи между множеством зубьев GET, смонтированных на ковше, показанных на фиг. 1 и 2, и RFID-приемником в соответствии с конкретной реализацией настоящего изобретения.
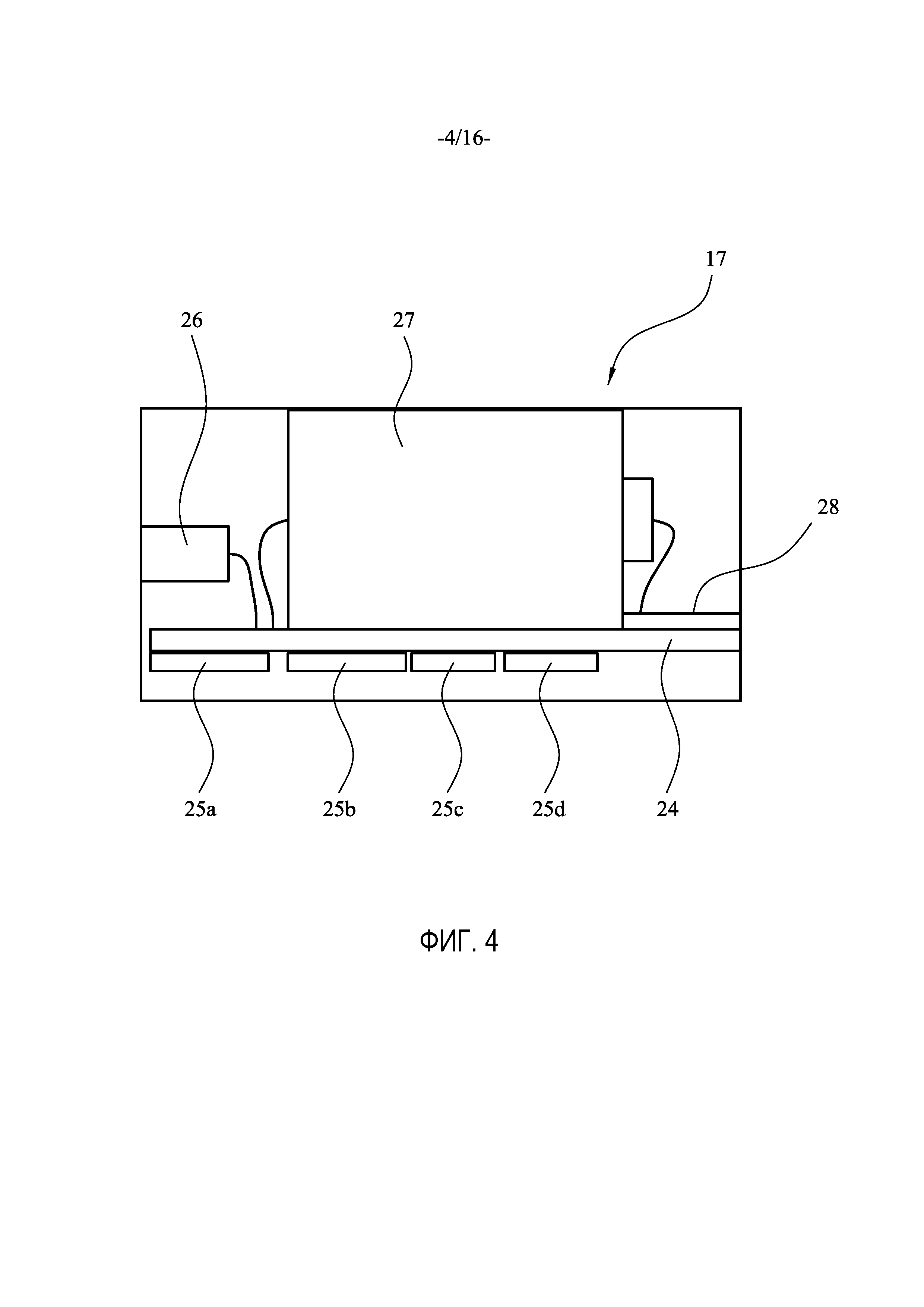
Фиг. 4 - схема RFID-метки, смонтированной на зубе GET согласно фиг. 2, в соответствии с конкретной реализацией настоящего изобретения.
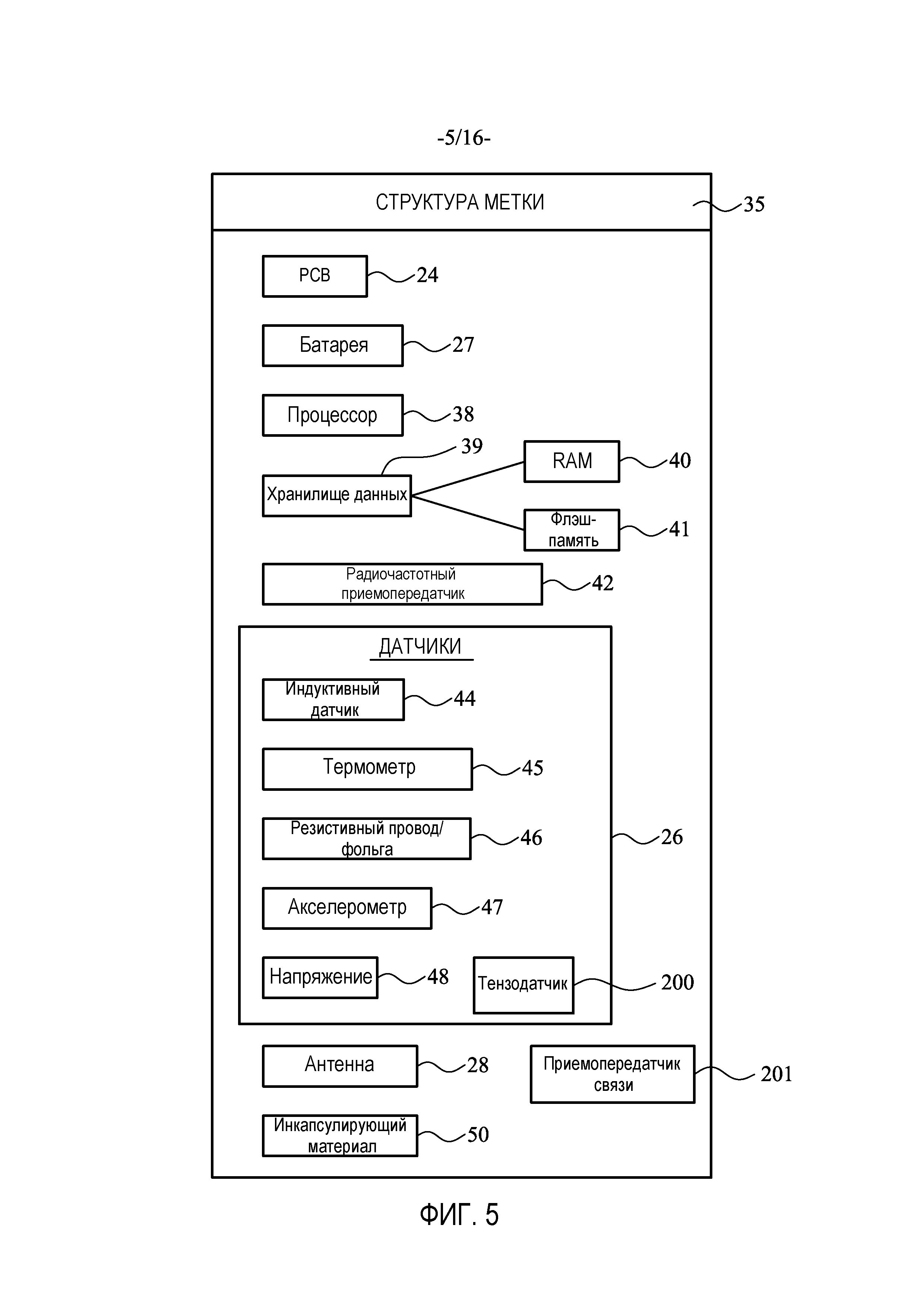
На фиг. 5 схематично показана структура RFID-метки.
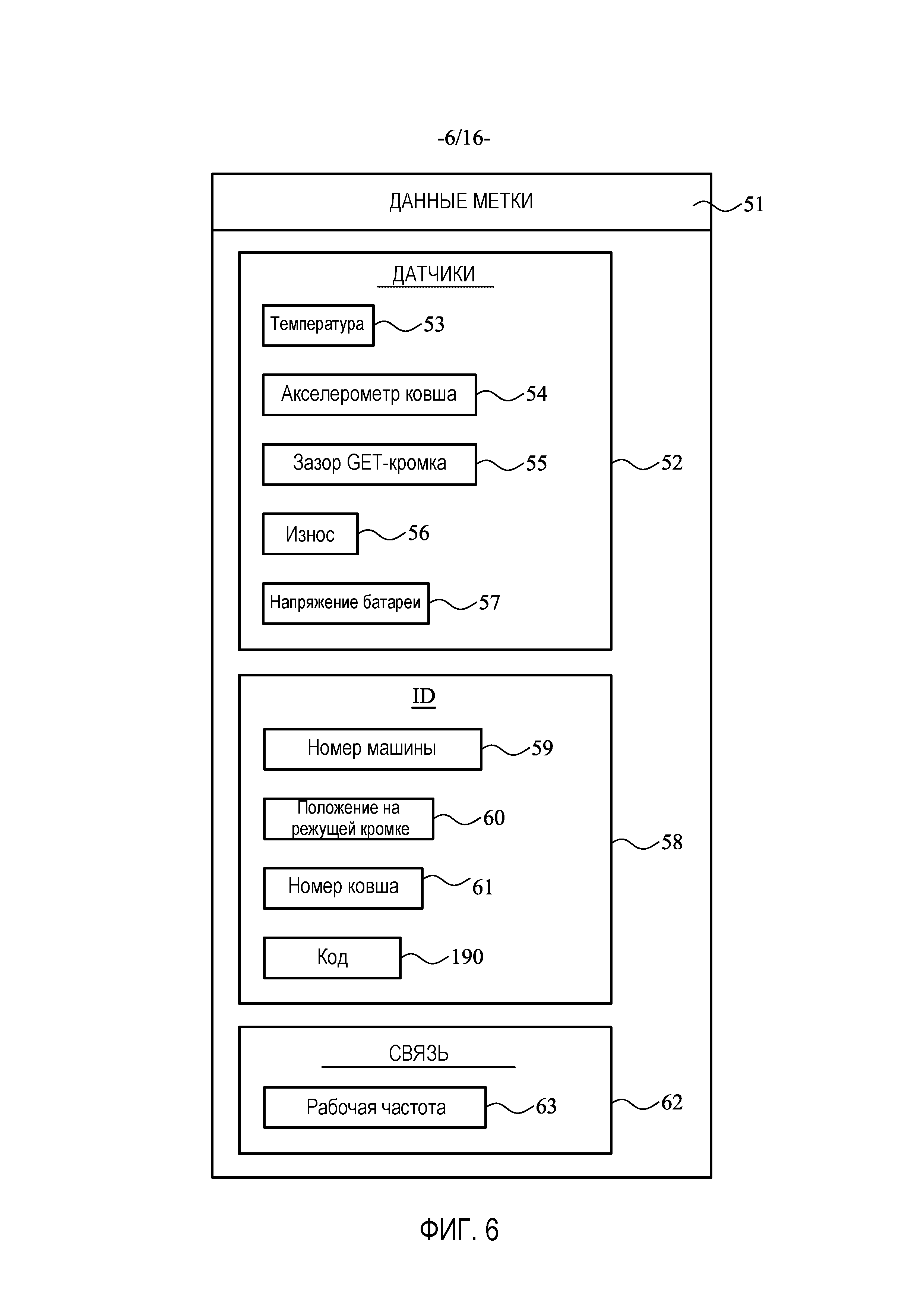
Фиг. 6 - схема данных RFID-метки.
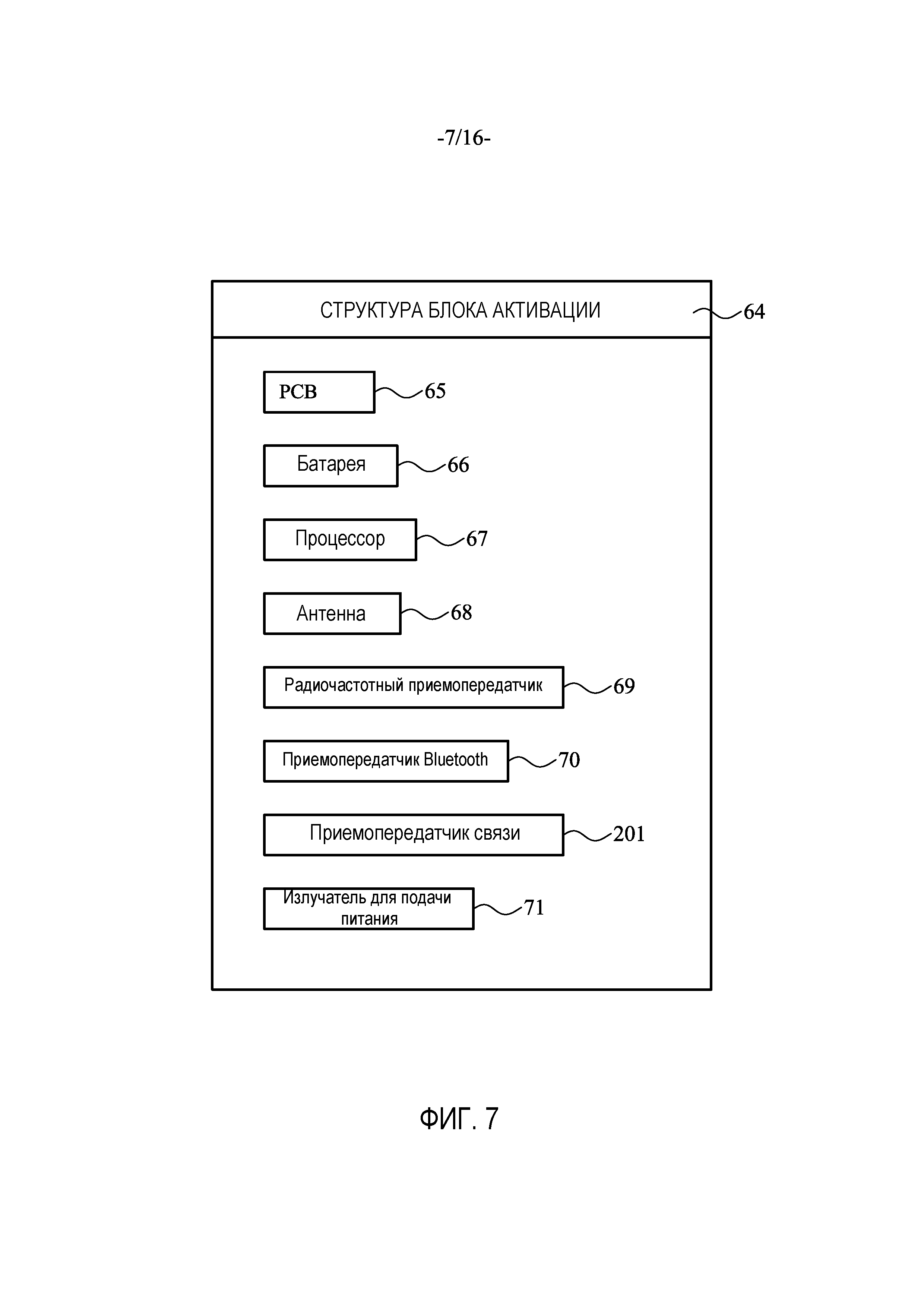
Фиг. 7 - схема структуры блока активации.
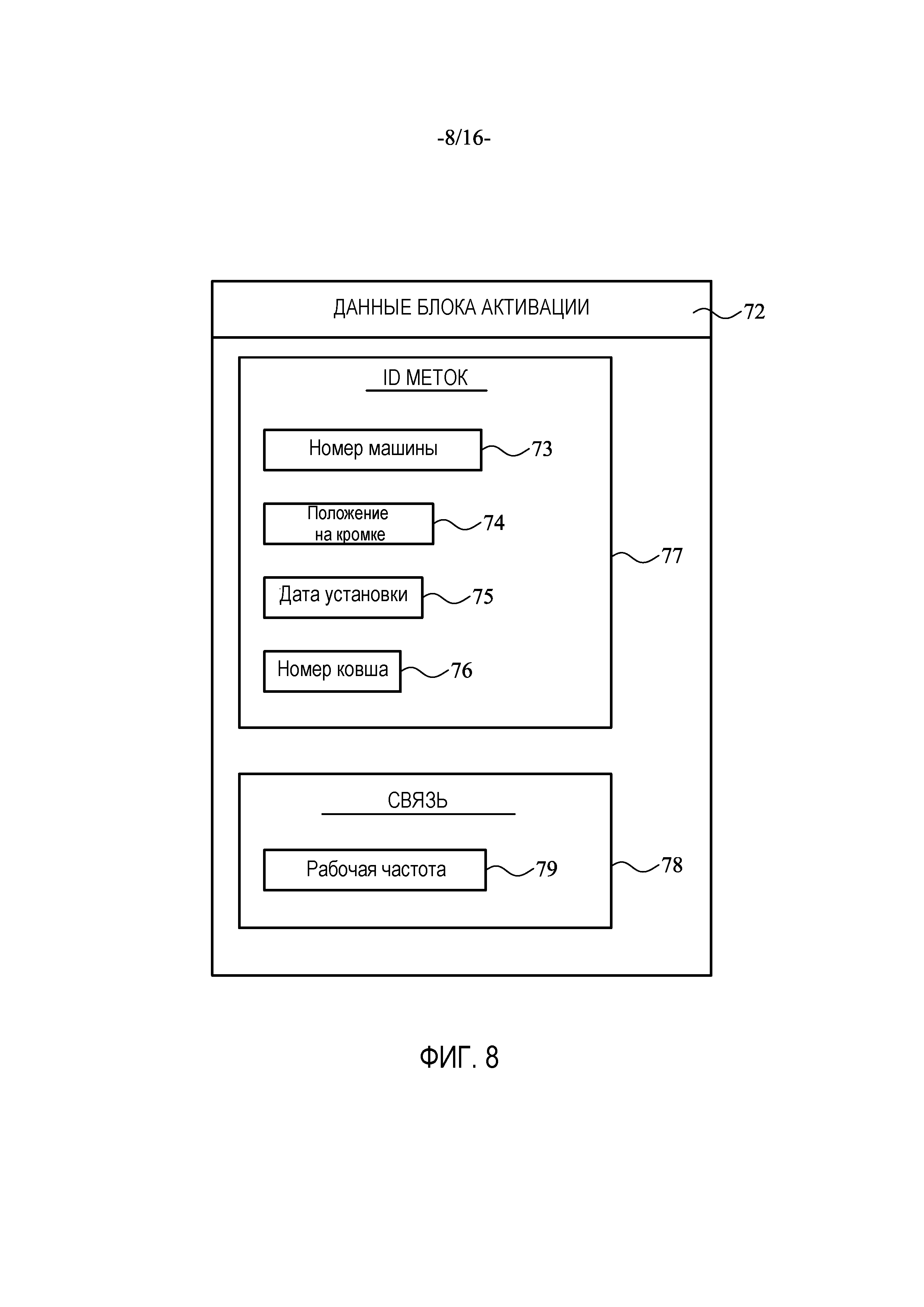
Фиг. 8 - схема данных блока активации.
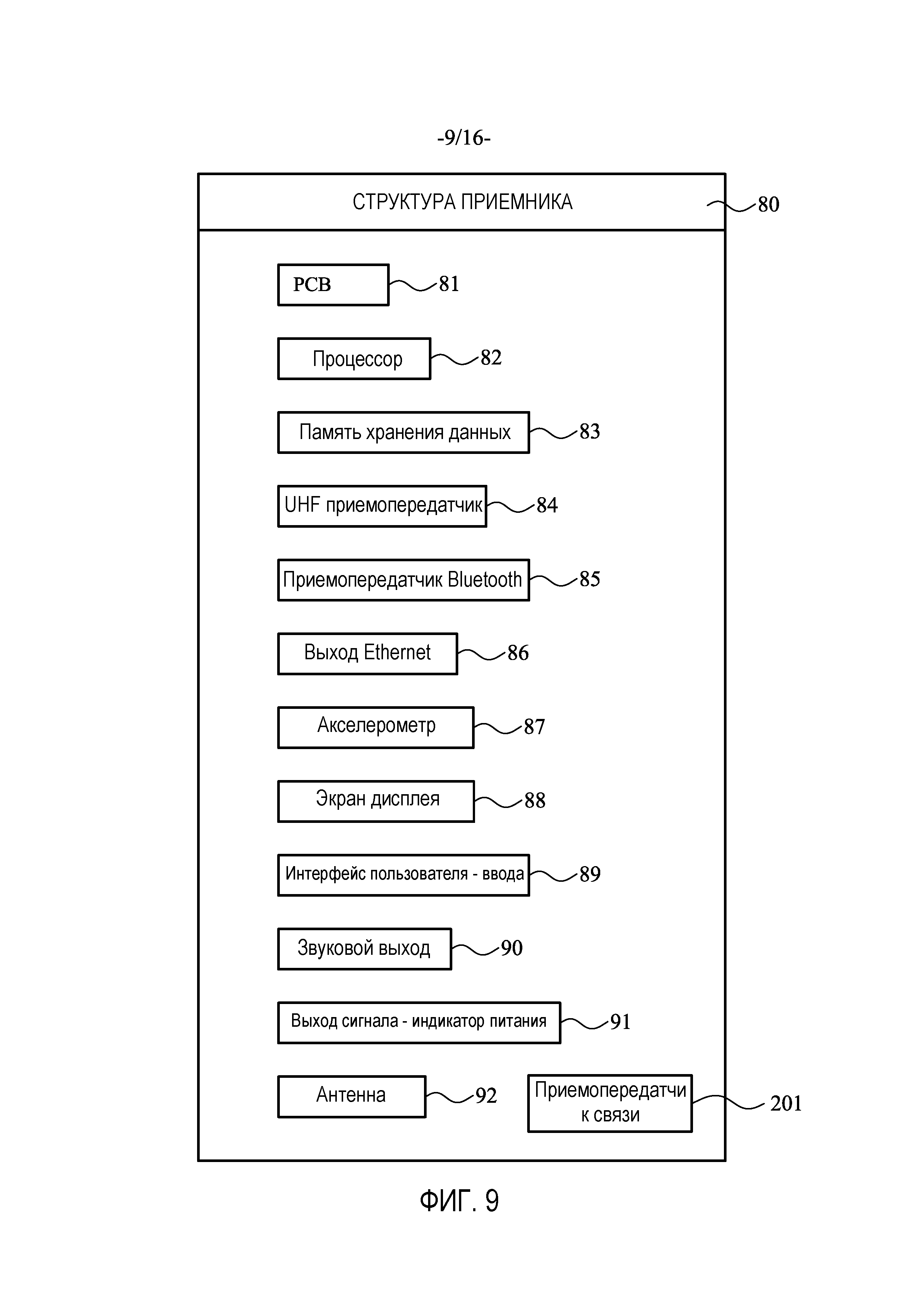
Фиг. 9 - схема структуры приемника.
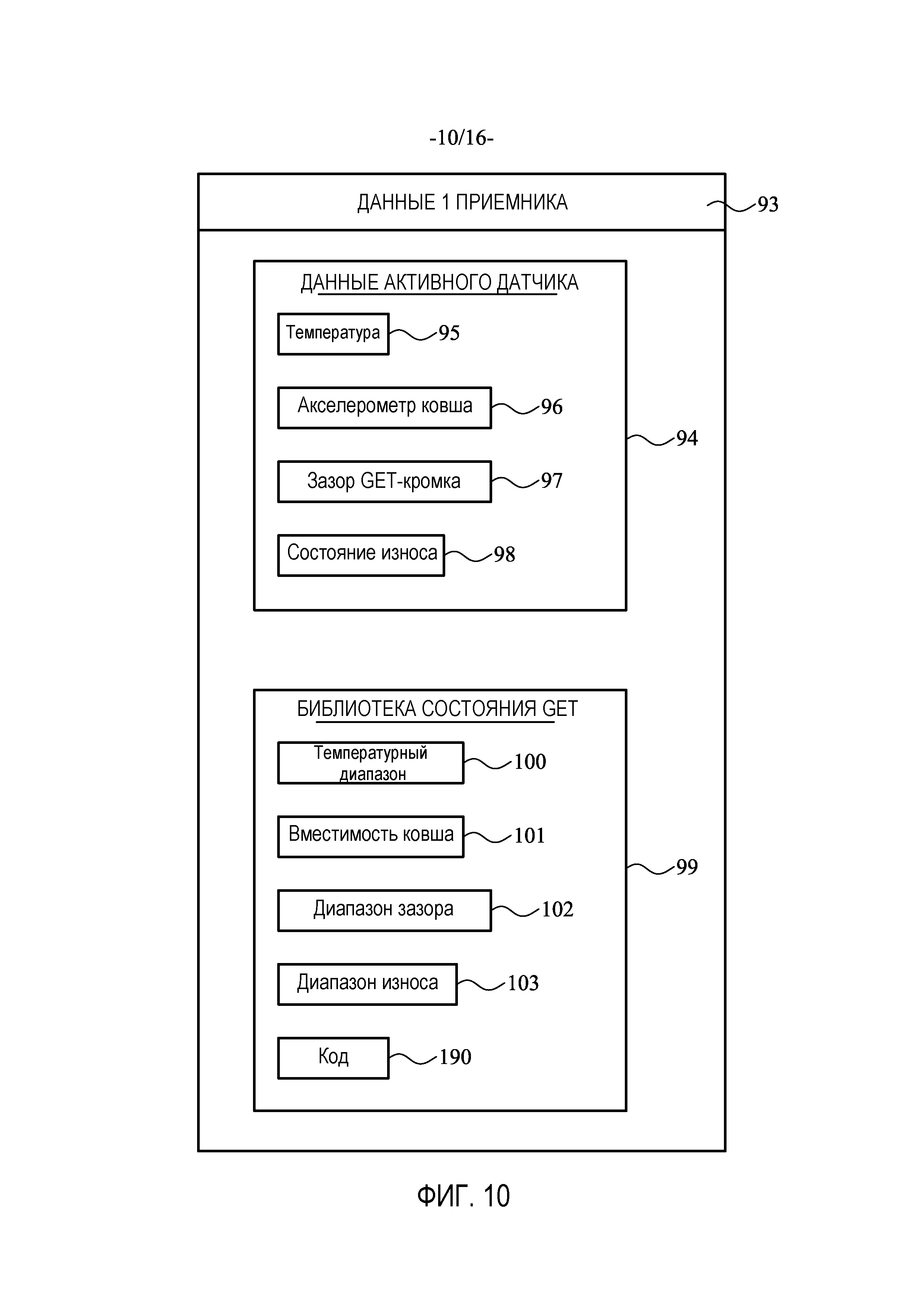
Фиг. 10 - первая часть данных приемника.
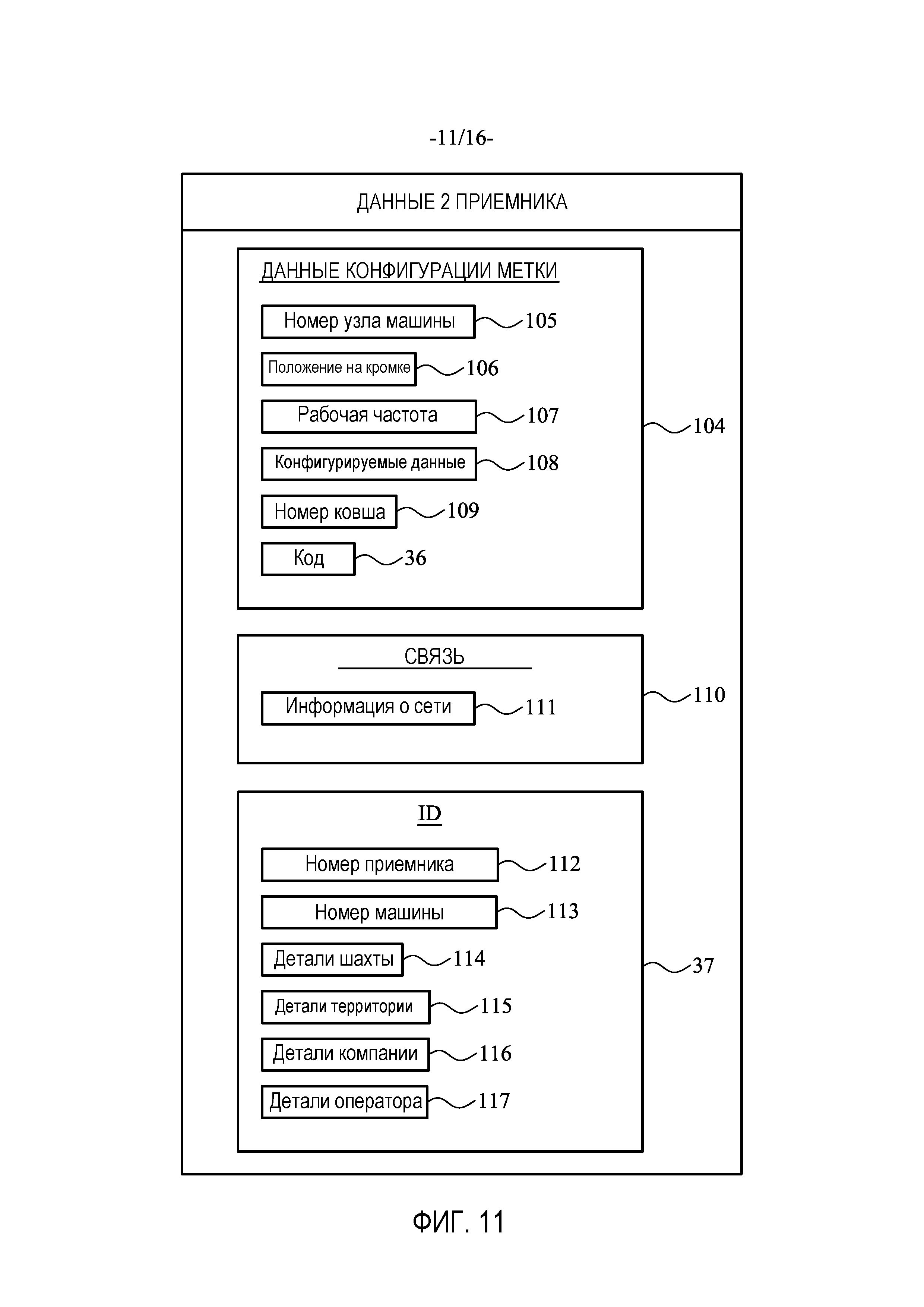
Фиг. 11 - вторая часть данных приемника.
На фиг. 12 схематично показаны операторы меток и операторы блока активации.
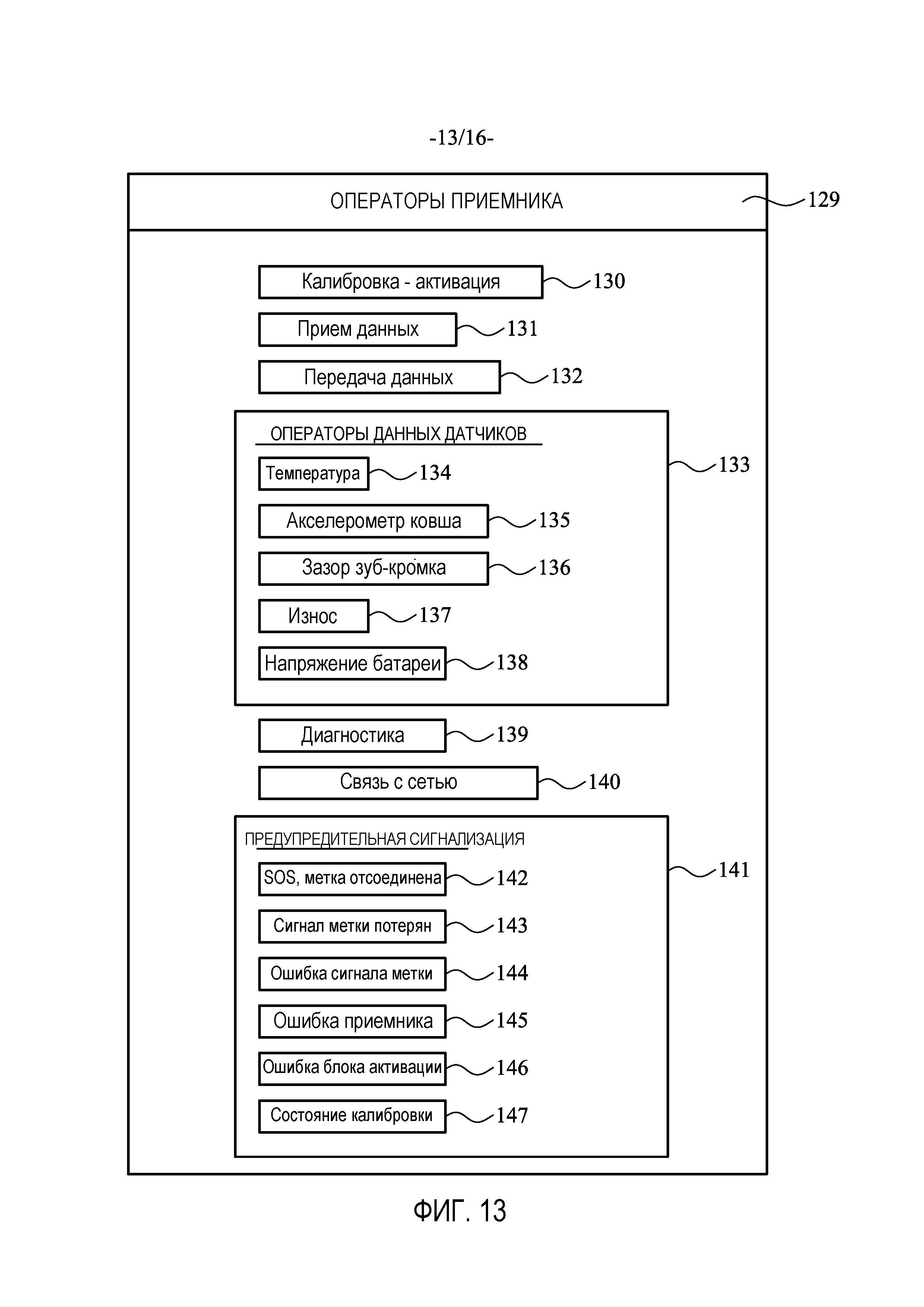
Фиг. 13 - схема операторов приемника.
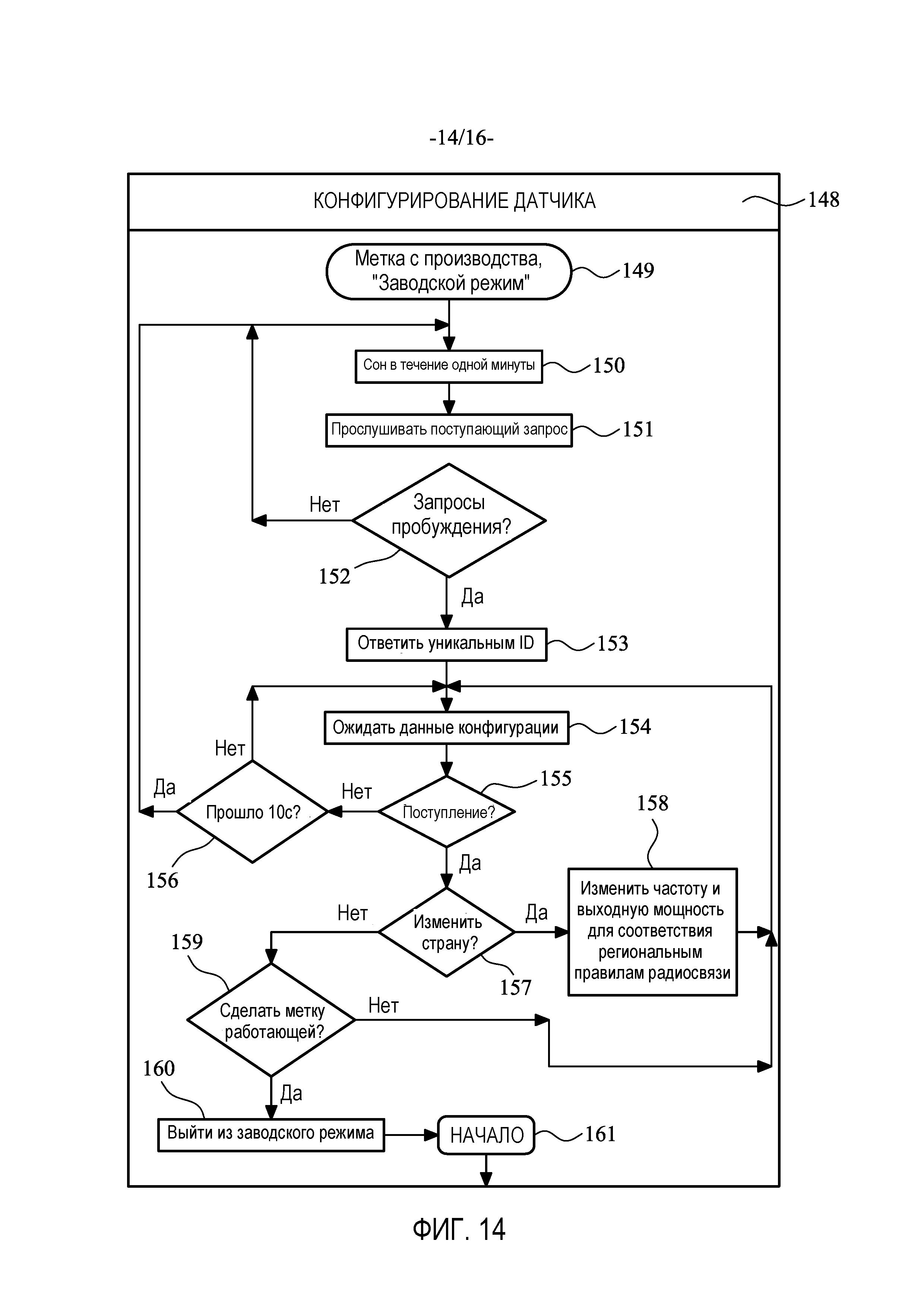
На фиг. 14 показана блок-схема начальной конфигурации и работы датчика в соответствии с конкретной реализацией настоящего изобретения.
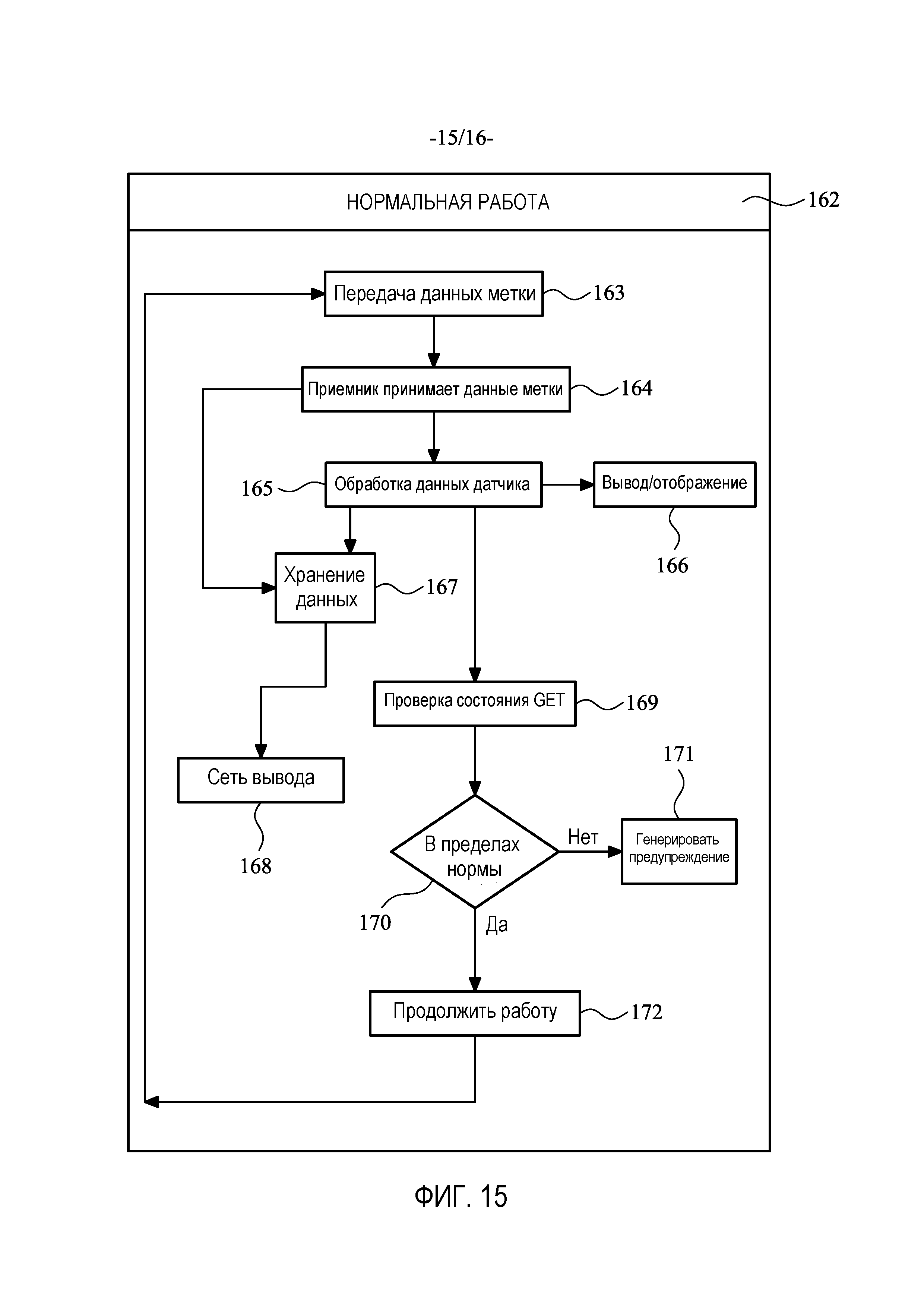
Фиг. 15 - блок-схема нормальной работы системы контроля состояния GET согласно одному аспекту настоящего изобретения.
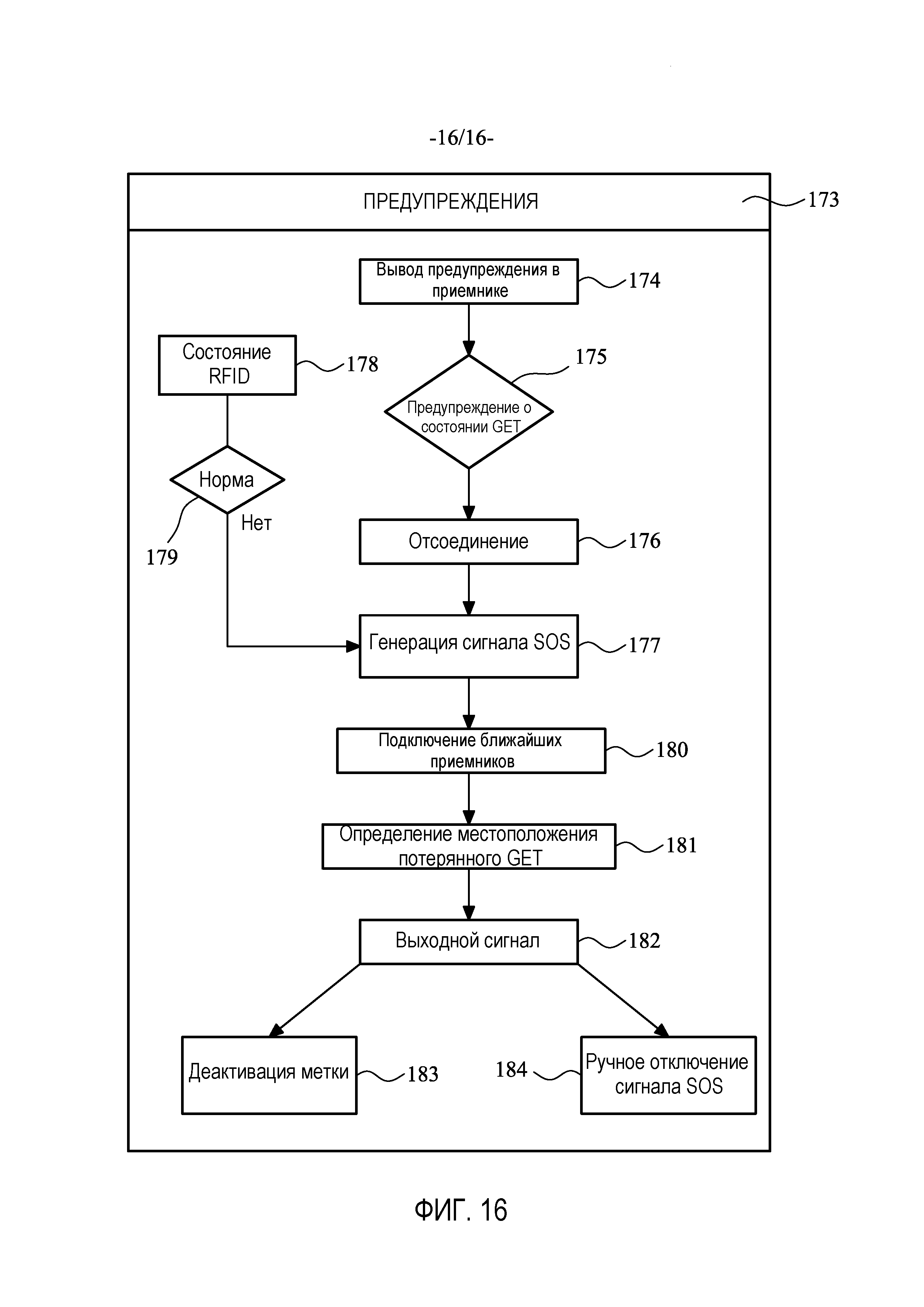
Фиг. 16 - блок-схема одного аспекта настоящего изобретения для обеспечения предупредительных сигналов в случае отсоединения зуба GET в ковше, как показано на фиг. 1 и 3.
Подробное описание предпочтительной формы осуществления изобретения
Предметом изобретения является система, позволяющая осуществлять активный контроль механического соединения изнашиваемой детали с тяжелым оборудованием, с тем, чтобы в реальном времени обнаруживать любое ослабление крепления и частичное или полное отсоединение изнашиваемой детали от участка ее крепления. Настоящее изобретение, соответственно, предлагает устройство и способ, направленные на предотвращение нежелательного отсоединения и потери изнашиваемых деталей в окружающей среде, такой как шахта или карьер. Задача настоящего изобретения состоит в том, чтобы избежать недостатков, связанных с таким нежелательным отсоединением, включая, в частности, повреждение устройства дальнейшей переработки, а также время и усилия, необходимые для обнаружения потерянных изнашиваемых деталей. Одна форма осуществления настоящего изобретения может быть проиллюстрирована на примере конфигурации шахтного погрузчика для горных работ, обычно называемого погрузочно-доставочной машиной 10 (Load Haul Dumper, LHD) 10. Погрузчик 10 содержит основную раму или шасси 12, кабину 11 управления и установленный на шарнире экскавационный ковш 13, на котором, в свою очередь, монтируется множество землеройных зубьев (Ground Engaging Teeth, GET) 14, прикрепленных соответственно к передней или режущей кромке 15 ковша 13. Понятно, что погрузчик 10 независимо приводится в действие двигателем, чтобы быть мобильным устройством, работающим автономно в условиях подземной шахты.
Как показано на фиг. 2, режущая кромка 15 ковша сформирована на передней кромке в целом пластинчатого основания ковша 13. Режущая кромка 15 имеет соответствующие размеры, чтобы вместить набор зубьев GET, причем каждый зуб GET монтируется на режущей кромке 15 с помощью разъемного механического крепления. Крепление содержит кожух, обозначенный в целом ссылочной позицией 18, сконфигурированный так, чтобы по меньшей мере частично охватывать режущую (переднюю) кромку 15 на крепежном участке зуба GET. Бобышка 19 (сформированная приваренным компонентом) надежно прикрепляется к режущей кромке 15 на крепежном участке каждого зуба GET. Узел 16 фиксатора с фиксирующим пальцем является съемно монтируемым на/внутри кожуха 18, чтобы обеспечить механическую фиксацию для крепления зуба GET 14 к режущей кромке 15 посредством совместного сцепления бобышки 19 в соответствии с компонентами и механизмом крепления, описанными в документе WO 2014/037780, содержание которого включено в данный документ посредством ссылки. В частности, кожух 18 содержит внутреннюю полость 18а, внутри которой установлен узел 16 фиксатора с фиксирующим пальцем, упирающимся в бобышку 19. RFID-метка 17 прикрепляется к зубу GET 14 путем монтажа внутри передней области полости 18а кожуха. Согласно конкретной реализации, метка 17 содержит электронные компоненты (как описано со ссылкой на фиг. 4 и 5) и соединена с зубом GET 14 посредством герметизирующего материала. В частности, метка 17 предпочтительно заключается в материал, который, во-первых, действует как адгезив для прикрепления метки 17 к передней области полости 18а кожуха и, во-вторых, обеспечивает влагозащитный корпус для метки 17.
Настоящая система содержит также портативный электронный "блок 20 активации", в основном сконфигурированный для активации и конфигурирования набора RFID-меток 17 для работы в соответствии с заявленным изобретением. Блок 20 активации (описанный далее со ссылкой на фиг. 7 и 8) сконфигурирован для беспроводной связи 22 с RFID-метками 17 в дополнение к отдельной беспроводной связи 23 с портативным компьютером или подходящим электронным устройством, таким как персональный цифровой помощник (PDA) 21. Как будет подробно описано ниже, блок 20 активации и помощник PDA 21 сконфигурированы для первоначальной активации меток 17 на месте (in situ) в рабочей среде и, в частности, при первоначальной установке и монтаже зубьев GET 14 на режущей кромке 15 ковша перед первым использованием.
Как показано на фиг. 3, заявленное изобретение также может рассматриваться как содержащее приемник 29, также сконфигурированный для беспроводной связи 31 независимо с каждым из монтируемых в ковше зубьев GET 14. Приемник 29, который содержит электронные компоненты и выполняет функции, описанные далее со ссылкой на фиг. 9, 10 и 11, дополнительно адаптирован для совместной связи с узлом или сетью 30 для обмена связанными с зубом GET данными с узлом/сетью 30. Как будет понятно, любые такие выгружаемые данные затем могут быть сконфигурированы для последующей передачи 33 в один или множество блоков хранения или дополнительные средства обработки данных (не показанные).
Как показано на фиг. 4 и 5, каждая RFID-метка 17 содержит печатную плату (РСВ) 24, на которой смонтировано множество схем 25а, b, с и d. На плате РСВ 24 дополнительно смонтированы батарея 27; антенна 28; процессор 38 на основе микрочипа; радиочастотный приемопередатчик 42; и подходящее хранилище 39 данных, содержащее соответственно оперативную память (Random Access Memory, RAM) 40 и флэш-память 41. Каждая метка 17 содержит блок 26 датчиков, который содержит множество датчиков различных типов, каждый из них сконфигурирован для контроля состояния в реальном времени соответствующего зуба GET 14 и, в частности, окружающей среды, в которой находится и работает зуб GET 14. В частности, блок 26 датчиков содержит, в соответствии с конкретной реализацией, индуктивный датчик 44, термометр 45, провод/фольгу 46 с высоким сопротивлением, акселерометр 47, датчик 48 электрического напряжения и тензодатчик 200. Опционально, структура 35 метки может содержать дополнительный приемопередатчик 201 связи. Дополнительный приемопередатчик 201 связи может быть сконфигурирован для реализации с любыми дополнительными видами связи, включая любой вид беспроводной связи, не ограниченный радиочастотами, и в частности в диапазоне UHF, VHF, стандарта Bluetooth и т.д. Подобные дополнительные или вспомогательные приемопередатчики 201 связи могут быть реализованы как часть структуры 64 блока активации и структуры 18 приемника. Блок 26 датчиков и, в частности, электронные компоненты 35 метки 17 все заключены в инкапсулирующий материал 50 на основе подходящего силиконового полимера (такого как эпоксидная смола), который защищает компоненты 35 и обеспечивает средство прикрепления метки 17 к зубу GET 14.
Процессор 38 обычно может содержать главный процессор в дополнение к небольшому энергоэффективному процессору (не показанному) для начальной активации главного процессора. Процессор 38 сконфигурирован для работы подходящей операционной системы реального времени, чтобы предоставлять функциональные возможности оператора меток, как описано со ссылкой на фиг. 12, с операторами 118 меток, реализованными в виде программного обеспечения.
Как показано на фиг. 5, датчик 48 электрического напряжения сконфигурирован для контроля напряжения на метке 17 и обеспечения контроля батареи 27 в режиме реального времени. Акселерометр 47 сконфигурирован для контроля множества различных характеристик ковша 13 (и, возможно, погрузчика 10), включая перемещение ковша в целом и, в частности, подъем ковша, горизонтальное/вертикальное перемещение, угловое вращение и ускорение/замедление ковша 13, включая, в частности, режущую кромку 15 ковша. Термометр 45 соответственно обеспечивает контроль температуры в области каждого зуба GET 14. В соответствии с конкретной реализацией резистивный проводной/фольговый датчик 46 выполнен в виде фольги или жесткой печатной платы, прикрепленной к основной печатной плате 24. Каждый зуб GET 14 содержит полученное литьем отверстие (не показанное), проходящее через корпус зуба GET в полость 18а кожуха. Резистивная фольга проходит через полученное литьем отверстие, чтобы выступать из нижней стороны зуба GET 14. Отверстие может быть заполнено заливочной смолой, такой как эпоксидный герметик, чтобы закрепить резистивную петлю на месте и сформировать композитный зуб GET. Соответственно, по мере износа зуба GET 14 длина резистивной фольги постепенно уменьшается, и обеспечивается контроль состояния износа зуба GET 14.
Настоящая система контроля состояния зуба GET в соответствии с заявленным изобретением специально сконфигурирована для контроля и вывода состояния механического крепления каждого зуба GET 14 на режущей кромке 15 ковша. В частности, посредством блока 26 датчиков и, в частности, индуктивного датчика 44, можно контролировать расстояние зуб GET-режущая кромка. В частности, посредством датчика 44 зазор между меткой 17 и бобышкой 19 непрерывно контролируется в режиме реального времени, чтобы выводить данные о близости в приемник 29. Такая система, как будет описано, является эффективной для определения постепенного частичного отделения или ослабления крепления зуба GET 14 на режущей кромке 15 ковша во время эксплуатации и, в частности, перед полным механическим отсоединением зуба GET 14. В соответствии с конкретной реализацией индуктивный датчик 44 выполнен в виде датчика близости, являющегося преобразователем, работающим в соответствии с эффектом Холла, в котором выходное напряжение изменяется в ответ на индуцированное магнитное поле, чтобы обеспечить измерение близости между меткой 17 и металлическим бобышкой 19 (например, образованной сварным компонентом). Понятно, что индуктивный датчик 44 может быть реализован в виде множества датчиков различных типов, монтируемых на печатной плате 24 и сконфигурированных для предоставления данных о близости зуба GET к режущей кромке ковша, которые затем допускают беспроводную передачу 31 в приемник 29 посредством смонтированного в метке радиочастотного приемопередатчика 42. Приемопередатчик 42 способен работать в широком диапазоне частот, обычно в диапазоне от 800 до 1000 МГц.
В процессе эксплуатации каждая метка 17 с помощью электронного компонента 35 связывается с множеством различных наборов 51 данных, которые обрабатываются процессором 38 и хранятся в хранилище 39, 40, 41 данных. В частности, датчики 44-48 сконфигурированы для вывода данных 55 о зазоре зуб GET-режущая кромка, данных 53 температуры, данных 56 износа, данных 54 угла (и ускорения/замедления) ковша и данных 57 напряжения батареи, соответственно, такие данные 53-57 являются данными 52 датчиков ковша. Каждая метка 17 с помощью хранилища данных 39, 40 и/или 41 конфигурируется данными 58 идентификации ID, специфическими для конкретного зуба GET и/или погрузчика. Такие данные 58 включают в себя данные 59 номера, присвоенного машине (являющиеся назначенным рабочим номером погрузчика 10); данные 60 положения (являющиеся положением конкретного зуба GET 14 на режущей кромке 15 относительно других зубьев GET 14 набора, установленного на том же погрузчике 10) и данные 61 номера ковша (соответствующие конкретному идентификационному ID номеру, назначенному ковшу 13, установленному на погрузчике 10). Данные 51 метки содержат также данные 62 связи, включая, в частности, значение 63 рабочей частоты, являющейся назначенной рабочей частотой шахты, в которой может работать погрузчик 10. По меньшей мере некоторые или все наборы 51 данных могут передаваться в метку 17 и/или из нее посредством беспроводной связи 22, 31 соответствующим блоком 20 активации и/или приемником 29.
Как показано на фиг. 7, портативный блок 20 активации реализован как портативное устройство, имеющее электронные компоненты 64, включая, в частности, печатную плату 65; батарею 66; процессор 67; антенну 68; радиочастотный приемопередатчик 69; приемопередатчик 70 по стандарту Bluetooth, передатчик 71 подачи питания и приемопередатчик 201 связи. Блок 20 активации также может содержать подходящий экран дисплея (не показан) для отображения информации пользователю. Альтернативно, блок 20 активации может не содержать дисплей (или компоненты вывода), отличный от компонентов беспроводной или проводной связи для обеспечения необходимых каналов 22, 23 связи между меткой 17 и помощником PDA 21. Соответственно, и как показано на фиг. 8, блок 20 активации сконфигурирован для использования с множеством наборов 72 данных блока активации, включая, в частности, данные 77 идентификации ID метки. Данные 77 идентификации ID метки включают в себя данные 73 номера, присвоенного машине; данные 74 положения монтажа зуба GET; данные 75 даты установки и данные 76 номера ковша погрузчика. Данные 72 блок активации дополнительно содержат данные 78 связи, включая, в частности, данные 79 назначенной рабочей частоты.
Как показано на фиг. 9, приемник 29, сконфигурированный для беспроводной связи 31, 32 с каждым зубом GET 14 и подходящим узлом/сетью 30, реализован как стационарный или портативный блок, монтируемый в кабине 11 погрузчика, и сконфигурирован преимущественно для приема данных 52 датчика от зубьев GET 14 при нормальной эксплуатации. Приемник 29 реализован с помощью электронного компонента 80, включающего, в частности, печатную плату 81, на которой смонтированы по меньшей мере один процессор 82; средство 83 хранения данных; UHF приемопередатчик 84; приемопередатчик 85 Bluetooth; выход 86 Ethernet; акселерометр 87, антенна 92 и приемопередатчик 201 связи. Компоненты 80 приемника дополнительно содержат экран 88 визуального дисплея; интерфейс пользователя или компонент 89 ввода (такой как клавиатура); звуковой выход 90 и световой индикатор 91 состояния питания. Приемник 29 с помощью электронных компонентов 80 приспосабливается для работы с множеством различных наборов данных, упоминаемых в данном документе как данные 93 приемника. Такие данные 93 приемника обычно включают в себя данные 94 активного датчика; данные 99 библиотеки состояния зубов GET; данные 104 конфигурации меток; данные ПО связи и идентификационные данные 37, относящиеся к фиг. 10 и 11. В частности, данные активного датчика включают в себя данные 95 температуры; данные 96 ускорении/замедления и углов ковша; данные 97 зазора зуб - режущая кромка; данные 98 о состоянии износа, при этом такие данные генерируются блоком 26 датчиков и принимаются в приемнике 29 по каналу 31 беспроводной связи. Набор данных библиотеки состояния зуба GET включает в себя данные 100 температурного диапазона; данные 101 вместимости ковша; данные 102 диапазона зазора и данные 103 диапазона износа. Такие данные 99 библиотеки могут быть загружены в приемник 29 по каналу 32 связи, чтобы обеспечить возможность бортовой обработки данных 94 активного датчика на основе соответствующего набора библиотечных данных. Такие библиотечные данные 99 могут использоваться для вычисления и предоставления выходных отчетов о состоянии зуба GET на режущей кромке 15 на основе исторических или требуемых рабочих параметров, таких как необходимая рабочая температура, ускорение/замедление ковша; максимальный порог зазора зуб GET-режущая кромка и предварительно определенная характеристика или порог износа, чтобы до превышения предела максимального износа определить, когда изношенный зуб GET 14 требует замены.
Данные 104 конфигурации метки включают в себя данные 105 номера узла машины; данные 106 положения зуба GET на режущей кромке; данные 107 рабочей частоты; данные 108 начальной калибровки или настройки и данные 109 назначенного номера ковша. Такие данные 104 конфигурации меток могут приниматься от каждой метки 17 (в каждом соответствующем зубе GET 14) параллельно с получением данных 94 активного датчика, чтобы связывать данные 94 датчика с конкретной меткой 17. В частности, данные 36 кода позволяют передавать и получать данные 94 датчика в приемнике 29 так, что приемник 29 принимает исключительно данные 94 активного датчика от зубьев GET 14, смонтированных на режущей кромке 15 ковша 13, установленного на соответствующем погрузчике. То есть, сигналы от других зубьев GET 14, смонтированных на других погрузчиках 10, эффективно игнорируются приемником 29, чтобы обеспечить "закрытую сеть" связи 31 между соответствующими зубьями GET 14, смонтированными в требуемом "локальном" ковше 13.
Данные 110 связи включают в себя, в частности, данные 111 информации о сети, которые необходимы для идентификации приемника 29 в узле/сети 30 из многочисленных независимых локальных сетей, образованных множеством горных машин (погрузчиков 10), работающих в данной окружающей среде. Данные 37 идентификации ID приемника включают в себя присвоенный приемнику номер 112; данные 113 номера, присвоенного машине; данные 114, связанные с шахтой; данные 115, связанные с территорией; данные 116, связанные с компанией; и данные 117, связанные с оператором. Такие наборы 37 данных используются для идентификации соответствующего приемника, машины и т.п. в среде добычи полезных ископаемых в дополнение к идентификации шахты, территории, компании и оператора машины, в которой зуб GET 14 работает или работал, в более крупной сети, такой как база данных компании, содержащая информацию о тяжелых машинах в большом количестве шахт и рабочих средах на множестве территорий.
Как указано, процессор 38, смонтированный в метке, сконфигурирован для обработки данных 51 метки. Такая обработка предпочтительно осуществляется программным обеспечением. Термин "операторы", используемый в данном документе, включает в себя программно-реализованные процедуры и функциональные возможности, причем такие операторы реализуются процессором 38 меток; процессором 67 блока активации и процессором 82 приемника.
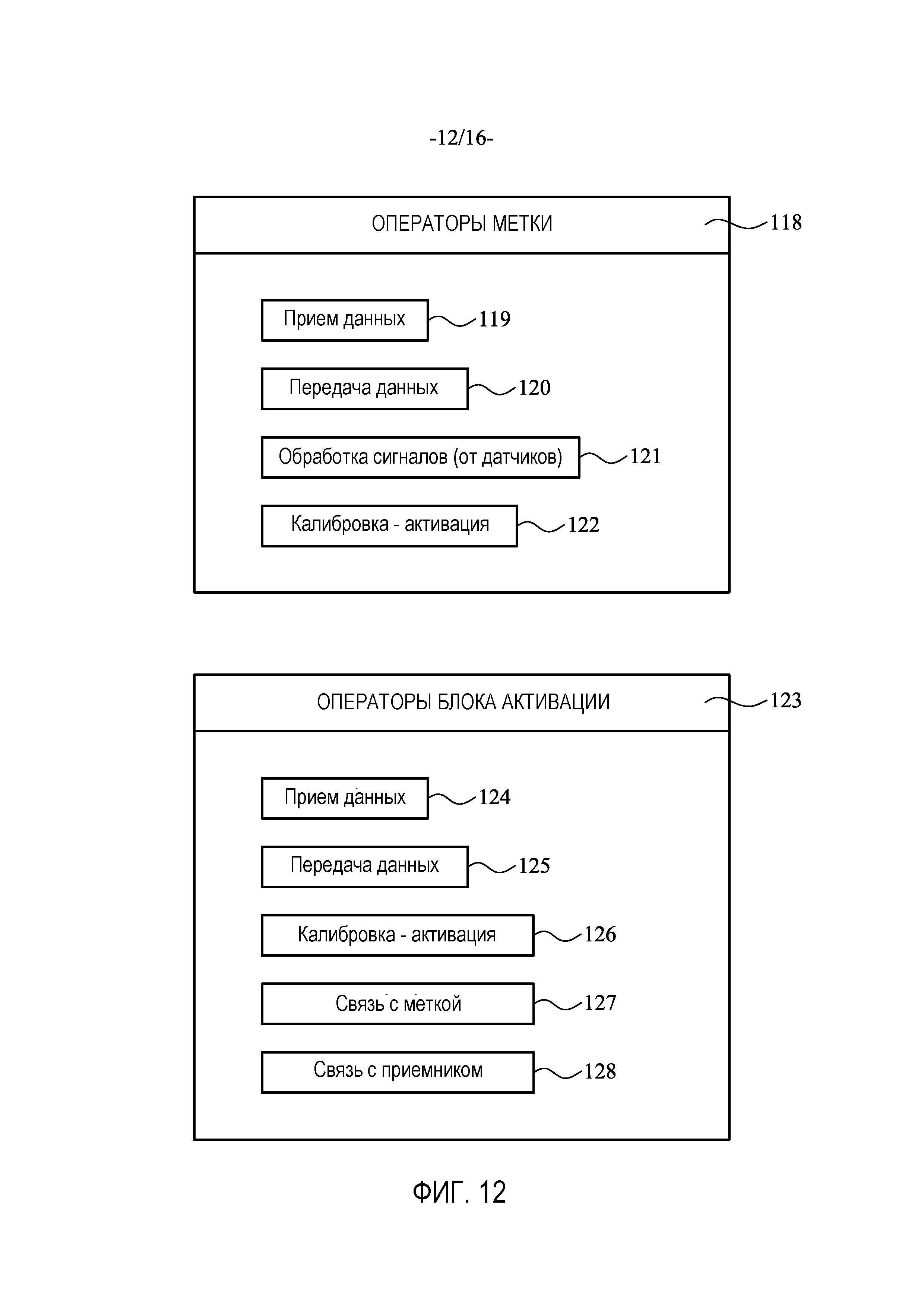
Операторы 118 меток включают в себя программное обеспечение, реализованное для приема данных 119 меток; передачи данных 120 датчика и других данных, относящиеся к метке; обработки сигналов от датчиков 121 и начальной калибровки и активации 122. Такие операторы функционируют для управления потоком данных 22, 23 от блока 20 активации через метку 17 во время первоначальной установки метки 17 непосредственно перед использованием в шахтной среде, как описано со ссылкой на фиг. 14. Операторы 118 также сконфигурированы для управления обработкой данных, генерируемых блоком 26 датчиков, и последующей передачей пакетов данных в приемник 29 по каналу 31 связи.
Аналогичные программно реализованные операторы 123 связаны с блоком 20 активации и включают в себя, в частности, получение 124 данных; передачу 125 данных; калибровку и активацию 126; связь 127 метки и связь 128 приемника. Такие операторы, как описано, с помощью операторов 118 меток управляют передачей данных между блоком 20 активации и соответствующими меткими 17 и помощником PDA 21 в дополнение к управлению различными наборами 77 и 78 данных в блоке 20 активации.
Соответствующие операторы 129, реализованные в программном обеспечении, включают в себя реализованное в приемнике программное обеспечение для управления и обработки данных 93 приемника (наборов 94, 99, 104, 110 и 37 данных). Такие операторы 129 приемника включают, в частности, выполнение 130 калибровки и активации; получение 131 данных; передачу 132 данных; операторы 133 данных датчиков, включая, в частности, операторы 134, 135, 136, 137, 138 для обработки данных, относящихся к температуре, состоянию ковша, зазору зуб GET-режущая кромка; износу зуба GET и напряжению батареи, соответственно. Операторы 129 приемника дополнительно содержат диагностические операторы 139; операторы 140 сетевой связи и операторы 141 предупредительной сигнализации. Операторы 141 предупредительной сигнализации включают, в частности, операторы для оповещения о том, что метка была отсоединена 142; метка потеряна 143; метка включает в себя ошибку 144 сигнала; приемник 29 неисправен 145; блок 20 активации работает со сбоями 146 и состояние 147 калибровки меток 17.
Посредством структуры, данных и операторов, как описано со ссылкой на фиг. 1-13, может быть выполнена начальная настройка конфигурации меток 17, и она описана со ссылкой на фиг. 14. Чтобы облегчить транспортировку меток 17, связанных с соответствующим зубом GET 14, метки 14 транспортируются в режиме "сна" или "заводском режиме". Как только зуб GET 14 устанавливается на режущей кромке 15 ковша на месте эксплуатации, метка 17 требует обработки посредством процесса 148 активации и, в частности, путем настройки конфигурации или операции в указанной окружающей среде добычи и, в частности, когда она прикреплена к конкретному ковшу 13 конкретной единицы тяжелого оборудования 10. На этапе 149 метка 17 устанавливается на режущей кромке 15 в "заводском" режиме. Метка 17 конфигурируется для "сна" в течение одной минуты на этапе 150 и "прослушивания" передачи от блока 20 активации. Метка 17 и блок 20 активации конфигурируются для связи в диапазоне UHF или по стандарту Bluetooth с помощью соответствующих приемопередатчиков 42 и 69. Соответственно, канал 22 связи инициируется и поддерживается так, чтобы позволить осуществить загрузку информации из блока 20 активации в каждую из меток 17 на режущей кромке 15. Если сигнал активации не принимается на этапе 152, то этапы 150 и 151 циклически повторяются. Если сигнал принимается, метка 17 отвечает уникальным идентификатором ID на этапе 153. Метка 17 затем ожидает данные конфигурации на этапе 154. На этапе 155, если данные конфигурации не принимаются через десять секунд (этап 156), метка 17 продолжает ожидание, и этап 154 повторяется. Если данные конфигурации принимаются на этапе 155, начинается (этап 157) обработка данных обмена, включая, в частности, настройку данных 58 идентификации ID метки, включая, в частности, изменение диапазона частот на этапе 158. Как только обмен данными завершен, блок 20 активации с помощью операторов 123 переходит к этапу 159, чтобы подтвердить метку 17 как полностью работоспособную. После установления полной работоспособности метка 17 выходит из "заводского" режима на этапе 160 и может начать передачу данных датчика на этапе 161. Данные начальной конфигурации метки могут быть выбраны и настроены под требования заказчика посредством ввода пользователем в PDA 21 для передачи в блок 20 активации по каналу 23. Понятно, что рабочая мощность блока 20 активации и, в частности, мощность передачи от блока 20 активации, может регулироваться так, чтобы управлять и, в частности, ограничивать локальную передачу данных из блока 20 активации в целевую метку 17 на режущей кромке 15.
Как только начальная калибровка каждой метки 17 будет завершена в соответствии с этапами 149-161, блок 20 активации обычно будет не активен, как часть контроля состояния зуба GET в реальном времени. Однако блок 20 активации может впоследствии использоваться для диагностического исследования и, в частности, для подтверждения рабочего состояния метки 17, если, например, при передаче данных возникнет какая-либо ошибка.
Ниже со ссылкой на фиг. 15 будет описан нормальный рабочий процесс в соответствии с заявленным изобретением. В частности, нормальный рабочий процесс 162 включает в себя передачу данных датчика RFID-меткой 17 на этапе 163. Такие данные включают в себя данные 52 датчика, включая, в частности, данные, относящиеся к близости или линейному расстоянию метки 17 относительно сварного компонента 19; температуре метки 17; состоянию износа зуба GET (на основе объема резистивного провода/фольги, имеющегося в зубе GET 14); ускорению/замедлению и углу наклона режущей кромки 15 ковша при эксплуатации и электрическому напряжению на метке 17. Такая передача 163 данных происходит в режиме реального времени и принимается в приемнике 29 на этапе 164. Приемник 29 принимает также данные 58 идентификации ID метки параллельно с данными 52 датчика. Установленный в приемнике процессор 82 затем конфигурируется для обработки принятых данных 52 датчика на этапе 165. Информация, основанная на обработанных данных датчика, может затем выводиться на этапе 166 через экран 88 дисплея, установленного в приемнике. Кроме того, такие обработанные данные датчика также могут сохраняться в средствах 83 хранения данных приемника на этапе 167. На этапе 168 обработанные данные датчика могут также выводиться в узел/сеть 30 через канал 32 беспроводной связи для последующей дальнейшей передачи 33 или обработки, как показано на фиг. 3. Как отмечено на фиг. 15, необработанные данные из метки 17 также могут храниться в средствах 83 хранения данных приемника без обработки в приемнике.
Соответственно, "оперативные" данные о близости могут передаваться и приниматься между меткой 17 и приемником 29, причем эта информация отображается в кабине 11 машины. Соответственно, оператор получает информацию о состоянии зуба GET в реальном времени. В случае, когда видно, что крепление зуба GET 14 ослабляется, действие может быть предпринято заблаговременно до полного механического отсоединения и нежелательной потери зуба GET 14 из смонтированного положения в ковше 13. Посредством приемника, содержащего библиотеку 99 состояния зубов GET, на этапе 169 может выполняться проверка состояния зуба GET, чтобы подтвердить, что зуб GET 14 не изношен более пределов пороговых значений или его крепление не ослабело более пределов заранее заданного порога. Соответственно, на этапе 170 оценивается рабочее состояние зуба GET. Если какая-либо физическая или механическая характеристика, которая контролируется блоком 26 датчиков, выходит за пределы необходимого диапазона, на этапе 171 генерируется предупредительный сигнал. Такой предупредительный сигнал может быть локальным в приемнике 29, выводимым с помощью экрана 88 дисплея, звукового выхода 90 и/или светового индикатора 91 состояния. Альтернативно, и в дополнение, предупредительный сигнал может передаваться в узел/сеть 30. Если датчик выводит данные в требуемом диапазоне, операция определения продолжается на этапе 172. Передача, получение и обработка данных и информации посредством этапов с 163 по 172 в основном локализованы между смонтированными в ковше метками 17 и приемником 29, расположенным в погрузчике 10. Посредством передачи идентификационных ID данных и, в частности, данных 190, 36 кода, данные от меток 17, смонтированных на других мобильных единицах 10, эффективно игнорируются. Таким образом, оператор конкретного погрузчика 10 уведомляется исключительно о состоянии крепления, состоянии износа, температуре и т.п. зубьев GET 14 в ковше 13 конкретного погрузчика.
Однако контроль текущего состояния зуба GET в локальной сети может быть расширен за пределы отдельных и независимых мобильных обрабатывающих машин 10. В частности, и как показано на фиг. 16, система контроля состояния зуба GET сконфигурирована для генерации предупредительных сигналов 173 во время нормальной работы 162, как описано со ссылкой на этап 171 предупредительной сигнализации. В частности, если зуб GET 14 отсоединяется от своего положения установки на режущей кромке 15, как показано на фиг. 2, на этапе 174 приемником 29 инициируется последовательность предупредительных сигналов. Этот процесс предупредительной сигнализации 173 включает в себя запрос данных 99 библиотеки операторов 133 и 141 данных датчика и/или предупредительной сигнализации. Если состояние RFID-метки находится в пределах ряда различных необходимых рабочих диапазонов при проверке состояния на этапе 178, за нормальной работой следует этап 179, соответствующий рабочей процедуре 162, подробно описанной на фиг. 15. Если зуб GET (посредством соответствующей метки 17) определяется как имеющий параметры датчика вне предварительно заданного рабочего диапазона, последовательность предупредительных сигналов активируется посредством начальной подтверждающей проверки (этап 175). Подтверждение отсоединения на этапе 176 может быть достигнуто исключительно посредством выходных данных 55, 97 датчика близости или в сочетании с данными 54, 96 датчика акселерометра каждого зуба GET 14 того же самого ковша 13, то есть, когда конкретный отсоединенный зуб GET 14 определяется как неподвижный, в то время как оставшаяся часть набора зубьев GET, прикрепленных к одному и тому же ковшу 13, определяется как подвижная. Такая ситуация может инициировать генерацию сигнала SOS на этапе 177. Согласно конкретной реализации, отсоединенный зуб GET 14 конфигурируется для генерации сигнала SOS на этапе 177 (на основе превышенного порогового значения близости). Все многочисленные независимые приемники 29 (установленные на соседних погрузчиках 10, работающих в одной рабочей среде) запрограммированы на прослушивание сигнала SOS. Этот сгенерированный меткой сигнал или код SOS будет включать в себя также широковещательную передачу данных 55 идентификации ID метки, включая, в частности, данные 59 идентификации ID номера, присвоенного машине, чтобы идентифицировать погрузчик 10, от которого отсоединен зуб GET 14.
Опционально, в соответствии с дополнительной конкретной реализацией, приемник 29 может быть сконфигурирован для генерации сигнала SOS. В рамках этого приемник 29 позволяет сконфигурировать несколько независимых приемников 29 (установленных на соседних погрузчиках 10) для приема данных от отсоединенного зуба GET 14. Этап 180, например, содержит передачу данных 190 и 36 кодов на соседние приемники 29 в локальной окружающей среде. Все приемники 29, установленные в кабинах, затем могут непрерывно сканировать и принимать данные от метки 17 отсоединенного зуба GET 14, передающего сигнал SOS.
Опционально, сигнал SOS может быть основан на данных 52 датчика, которые находятся за пределами заранее заданного диапазона (или превышают пороговое значение), как и следовало ожидать от "отсоединенного" зуба GET. Например, такой сигнал SOS может быть основан на данных 54 акселерометра, так как отсоединенный зуб GET будет неподвижным. Такая передача данных может быть уточнена соответствующими данными 55 индуктивного датчика в случае, когда зазор между меткой 17 и бобышкой 19 превысил пороговое значение, указывающее на отсоединение.
Как только местоположение потерянного зуба GET определено на этапе 181 (например, соседним погрузчиком 10), генерируется выходной сигнал на этапе 182. В ответ на выходной сигнал 182 подача генерируемого меткой сигнала SOS прекращается на этапе 184. В одной реализации это может быть достигнуто путем ручного прикрепления стальной плитки или планки к внутренней поверхности зуба GET 14 после возвращения, что, в свою очередь, изменит окружающую среду индуктивного датчика 44 и, в свою очередь, эффективно деактивирует сигнал SOS на этапе 183. В соответствии с дополнительным вариантом, блок 20 активации может приводиться в действие, чтобы отключить метку 17 и прекратить подачу сигнала SOS.
Соответственно, заявленное изобретение, как описано со ссылкой на фиг. 15 и 16, способно осуществлять активный контроль состояния зуба GET на тяжелой машине 10. В частности, заявленное изобретение обеспечивает контроль состояния в режиме реального времени (порядка нескольких событий определения состояния в миллисекунду, секунду или минуту) для вывода на удаленное устройство активного состояния крепления зуба GET. Настоящее изобретение предлагает систему для локального контроля состояния множества зубьев GET (например, на ковше) с такой локальной сетью, которая совместима для использования в большой рабочей среде, которая обычно содержит множество локальных управляющих сетей, связанных с каждой независимой мобильной горной машиной (например, с погрузчиком 10). Настоящее изобретение также предлагает систему, сконфигурированную для подачи предупредительной сигнализации SOS так, что локальные сети могут быть расширены и могут стать "открытыми", в том смысле, что сигнал от отдельного GET может быть идентифицирован множеством устройств и приемников в среде добычи полезных ископаемых за пределами начальной конфигурации локальной сети конкретного потерянного зуба GET. Заявленное изобретение преимущественно реализуется с помощью технологии RFID-меток, причем такая передача сигнала может быть адаптирована для соответствия различным рабочим средам и, в частности, диапазонам рабочей частоты, а также для конфигурирования настроек внутреннего регистра и функции программного обеспечения в зависимости от правил территории и/или шахты, где работает зуб GET.
Конструктивные элементы с залитым цементированным карбидом
Отбойный или землеройный инструмент, содержащий вставку и кольцо из цементированного карбида вольфрама, машина для удаления материала, включающая в себя такой инструмент, и способ изготовления такого инструмента
Ослабление колебаний давления в дробилках
Фиксирующее устройство для земляного бура и система земляного бура с указанным фиксирующим устройством
Средство крепления просеивающих поверхностей и применение такого средства
Инструмент для отбойки и выемки грунта со вставкой из цементированного карбида вольфрама и кольцом, машина для выемки материала, включающая в себя такой инструмент, и способ изготовления такого инструмента
Упорный подшипник конусной дробилки и способ поддержания вертикального вала в такой дробилке
Способ и устройство для управления работой конусной дробилки
Сплав на основе никеля, способный образовывать оксид алюминия
Конусная дробилка

