Результат интеллектуальной деятельности: Сельскохозяйственный робот-комбайн
Вид РИД
Изобретение
Изобретение относится к сельскохозяйственному роботостроению и предназначено для использования при возделывании и уборке урожая плодоовощной растениеводческой продукции на открытых посадках.
Известны сельскохозяйственные роботы для возделывания и уборки растениеводческой продукции на открытых посадках, включающие колесные шасси со свободновращающимися и приведенными от двигателя колесами, электронный блок управления роботом с вычислительным устройством с установленным на нем специальным программным обеспечением, агрегатными отсеками с устройствами для обработки и упаковки продукции, навигационным оборудованием, сенсорно-сканирующим оборудованием для восстановления виртуальной структуры посадок и позиционирования продукции, рабочими органами для воздействия на почву и на посадки и для отделения продукции от посадок и транспортером для перемещения продукции от рабочих органов к агрегатным отсекам [Chamen W.C.T., Dowler D., Leede P.R., Longstaff D.J. Design, operation and performance of a gantry system: experience in arable cropping. Journal of Agricultural Engineering Research 1994, 59: 45-60].
Недостатками известных конструкций является неэффективность рабочих органов сельскохозяйственных роботов при выполнении операций отделения плодоовощной и, в особенности, сочноплодовой продукции от посадок, что обусловлена неразрешенностью кинематической проблемы безопасного фиксирования сочноплодовой продукции в посадках и неповреждающего отделения продукции от посадок с достаточной для достижения экономической эффективности роботизации производительностью уборочного агрегата. Также рабочие органы отличаются чрезмерной для полевых условий работы сложностью конструкции и высокой стоимостью обслуживания, а схватывающие элементы рабочих органов могут создавать зоны концентраций нагрузок на поверхность продукции при ее фиксировании в посадках и отделении продукции от посадок.
Наиболее близким по технической сущности по конструкции и предназначению является патент РФ №2492620 «Сельскохозяйственный робот», в котором имеются каретки с агрегатными отсеками, навигационным оборудованием и устройством управления роботом, а также соединяющую каретки платформу со связанными с устройством управления роботом сканерами, рабочими органами для воздействия на почву и на посадки и сбора продукции и транспортером для перемещения продукции от рабочих органов к агрегатным отсекам. Платформа выполнена сборной из унифицированных производственных и/или транспортных секций. Производственные секции снабжены рабочими органами, транспортером продукции и встроенными элементами электрической, пневматической и/или гидравлической системы робота. Рабочие органы указанного изобретения представляют собой очувствленные посредством сенсоров положения многозвенные манипуляторы с числом степеней подвижности не меньше шести. Предполагается, что при таком количестве подвижностей может быть обеспечено безопасное для растений и неповреждающее для продукции взаимодействие с продукцией в процессе ее фиксирования, отделения от посадок и подаче на транспортер. Очувствление манипулятора осуществляется за счет датчиков положения, в качестве которых используются энкодеры, измеряющие углы между пространственными положениями осей звеньев манипулятора. Специальное программное обеспечение устройства управления робота-комбайна вырабатывает сигналы управления приводами.
В дальнейшем будем определять понятием робастность управления манипулятором способность системы управления манипулятором обеспечить безопасное взаимодействие элементов конструкции манипулятора с посадками и неповреждающее взаимодействие с продукцией при фиксировании ее в посадках, отделении от посадок и подачи на транспортер.
Условие неповреждающего взаимодействия манипулятора с продукцией рассматривается как ограничения на динамические режимы пространственных эволюций, выполняемых элементами манипулятора в процессе выполнения производственных операций.
При определении характеристик рабочего органа сельскохозяйственного робота-комбайна исходят из того, что для недопущения ударных столкновений звеньев с элементами структур растений и продукцией управление кинематическими эволюциями и динамическими режимами должно обеспечивать упреждающие изменения направлений и скоростей перемещения звеньев манипулятора. Для этого устройство управления сельскохозяйственного робота-комбайна должно получать информацию о характере посадок на участках, приближающихся к рабочему пространству манипуляторов, а управление кинематическими эволюциями и динамическими режимами звеньев манипулятора должно обеспечивать необходимую для эффективной работы манипулятора скорость перемещений элементов конструкции и соблюдение ограничений нагрузок на поверхность элементов растений и на поверхность продукции. Такую информацию устройство управления может получить от системы распознавания структуры посадок по видеопотоку от видеосистем, направленных на приближающийся к рабочему пространству манипуляторов участок посадок, и от датчиков сближения схватов манипуляторов с распознанной продукцией.
Недостатками прототипа являются - в конструкции не предусмотрены датчики сближения элементов конструкции манипуляторов с элементами структуры растений в посадках с продукцией, система управления манипулятором не может обеспечить робастное управление.
Для недопущения возникновения концентраций нагрузок на поверхность продукции схватывающие элементы рабочих органов робота-комбайна должны обладать способностью увеличивать площадь контакта с продукцией со скоростью, не меньшей скорости возрастания давления схватывающих элементов на поверхность продукции.
Также необходимо отметить, что способ очувствления манипуляторов по данным энкодеров, определяющих взаимные угловые положения звеньев манипулятора позволяет контролировать состояние системы манипулятор - рабочее пространство, но не позволяет контролировать состояние системы манипулятор - посадки и манипулятор - продукция.
Отсутствие бесконтактных датчиков сближения с продукцией исключает образование замкнутой цепи управления манипулятором с обратной связью. Отсутствие обратной связи не позволяет обеспечить робастное управление взаимодействиями манипуляторов с живыми организмами. Поскольку посадки являются средой с существенными неопределенностями, влияющими на состояния манипулятора, без робастного управления манипуляторы не могут обеспечить безопасное неповреждающее взаимодействие с элементами растений в посадках и непосредственно с плодоовощной продукцией.
Также, недостатками указанного прототипа являются сложность конструкции манипулятора с большим количеством степеней свободы, отсутствие на роботе-комбайне бесконтактных датчиков сближения с продукцией и возможность возникновения концентрации нагрузок от схватывающих элементов рабочих органов на поверхность продукции.
Задачей изобретения является создание манипулятора для сельскохозяйственного робота-комбайна с робастным управлением для уборки плодоовощной продукции в полевых посадках и исключающим возникновение концентраций нагрузок на поверхность продукции от схватывающих элементов манипулятора.
При этом следует учитывать, что величина динамических эффектов взаимодействия с элементами структур растений и продукции может меняться в значительных пределах - порядка миллиона раз. Это обстоятельство исключает применение на сельскохозяйственной робототехнике способов очувствления манипуляторов по изменениям нагрузок в приводах подвижных звеньев манипулятора, эффективных при создании коллаборативной робототехники промышленного назначения.
Задача решается тем, что различные подвижности манипулятора сельскохозяйственного робота-комбайна обеспечивают независимыми механизмами, где управления сельскохозяйственного робота-комбайна снабжают специальным программным обеспечением для определения скорости сближения рабочих органов робота-комбайна с продукцией, а взаимодействующие с растениями и продукцией элементы конструкций манипуляторов покрывают псевдопластичным эластичным материалом. В зависимости от вида посадок и цвето-температурных характеристик поверхностей продукции для определения скорости сближения рабочих органов с продукцией используют данные любых известных оптико-электронных датчиков расстояния ближнего радиуса действия, стерео-видеоизображения посадок в видимом и/или инфракрасном и ультрафиолетовом диапазонах, и/или данные лазерных, инфракрасных, микроволновых или ультразвуковых дальномеров, которые направляют в программу распознавания образов и позиционирования актуальных объектов в рабочем пространстве манипуляторов.
Оптико-электронные стерео-видеосистемы устанавливают на несущей конструкции робота-комбайна с перекрывающимися полями зрения, направленными на участок посадок, приближающийся к рабочему пространству манипуляторов. Лазерные, инфракрасные, микроволновые или ультразвуковые дальномеры размещают таким образом, чтобы приемные устройства дальномеров располагались в непосредственной близости от схвата манипуляторов робота-комбайна. Для обеспечения эффективности оптико-электронных систем при работе на посадках с развитой листовой поверхностью на сельскохозяйственный робот-комбайн устанавливают хедерный подъемник листвы в виде приведенного ротора с эластичными лопастями.
Установленное в блоке управления сельскохозяйственного робота-комбайна программное обеспечение обрабатывает потоки данных датчиков различной физической природы действия, распознает продукцию в посадках, определяет численные значения угловых и линейных координат, характеризующих направления и расстояния до находящейся в рабочем пространстве манипулятора продукции. По этим вычисленным значениям определяет оптимальную для фиксации продукции конфигурацию манипулятора и ориентацию схвата и, посредством решения любым известным образом прямой задачи кинематики манипулятора, вырабатывает управляющие команды для приводов манипулятора.
Псевдопластичное эластичное покрытие схватывающих элементов манипулятора обеспечивает опережающий рост площади поверхности контакта схватывающих элементов манипулятора с поверхностью продукции при возрастании давления схватывающих элементов на продукцию и, тем самым, исключает возникновение концентраций нагрузок на поверхность продукции.
Сельскохозяйственный робот-комбайн для уборки урожая бахчевых и ягодных культур на открытом грунте в безлюдном режиме, состоит из транспортной платформы со свободными и приведенными от двигателя колесными движителями и производственными секциями с манипуляторами для отделения продукции от посадок, сортировочного устройства, бункера для собранной продукции, системы транспортировки продукции в сортировочное устройство, аппаратно-программного комплекса для сканирования посадок, навигационного и позиционирующего устройств.
Манипуляторы для отделения продукции от посадок выполнены трехзвенными, первое из которых соединено с комлевой частью конструкции манипулятора и со вторым звеном одноосевыми шарнирами для обеспечения локальных и частично региональных и перемещений манипулятора в плоскости, перпендикулярной направлению движения уборочной секции робота-комбайна, а третье звено выполнено в виде схвата для фиксации продукции и соединено со вторым звеном вращательным шарниром, обеспечивающим ориентацию схвата относительно продукции, а комлевая часть манипулятора закреплена на каретке, перемещающейся от привода по расположенным на транспортной платформе параллельно направлению движения комбайна направляющим и обеспечивающей глобальные и региональные перемещения манипулятора по направлению движения уборочной секции робота-комбайна, а фиксирующие продукцию элементы конструкции схвата снабжены оболочкой из псевдоэластичного материала.
Полезный результат от применения изобретения достигается тем, что, вследствие снижения количества подвижностей манипуляторов и распределения региональных и локальных перемещений на разные устройства снижается сложность конструкции, стоимость изготовления и обслуживания манипуляторов. Совместное использование данных оптико-электронных стереосистем для предварительного анализа состояния посадок и вероятного расположения продукции в приближающейся к рабочему пространству манипуляторов робота-комбайна зоне посадок, и данных размещенных в рабочей зоне манипуляторов дальномеров позволяет без снижения скорости движения робота-комбайна избежать возникновения сингулярных возмущений состояния системы манипулятор-посадки.
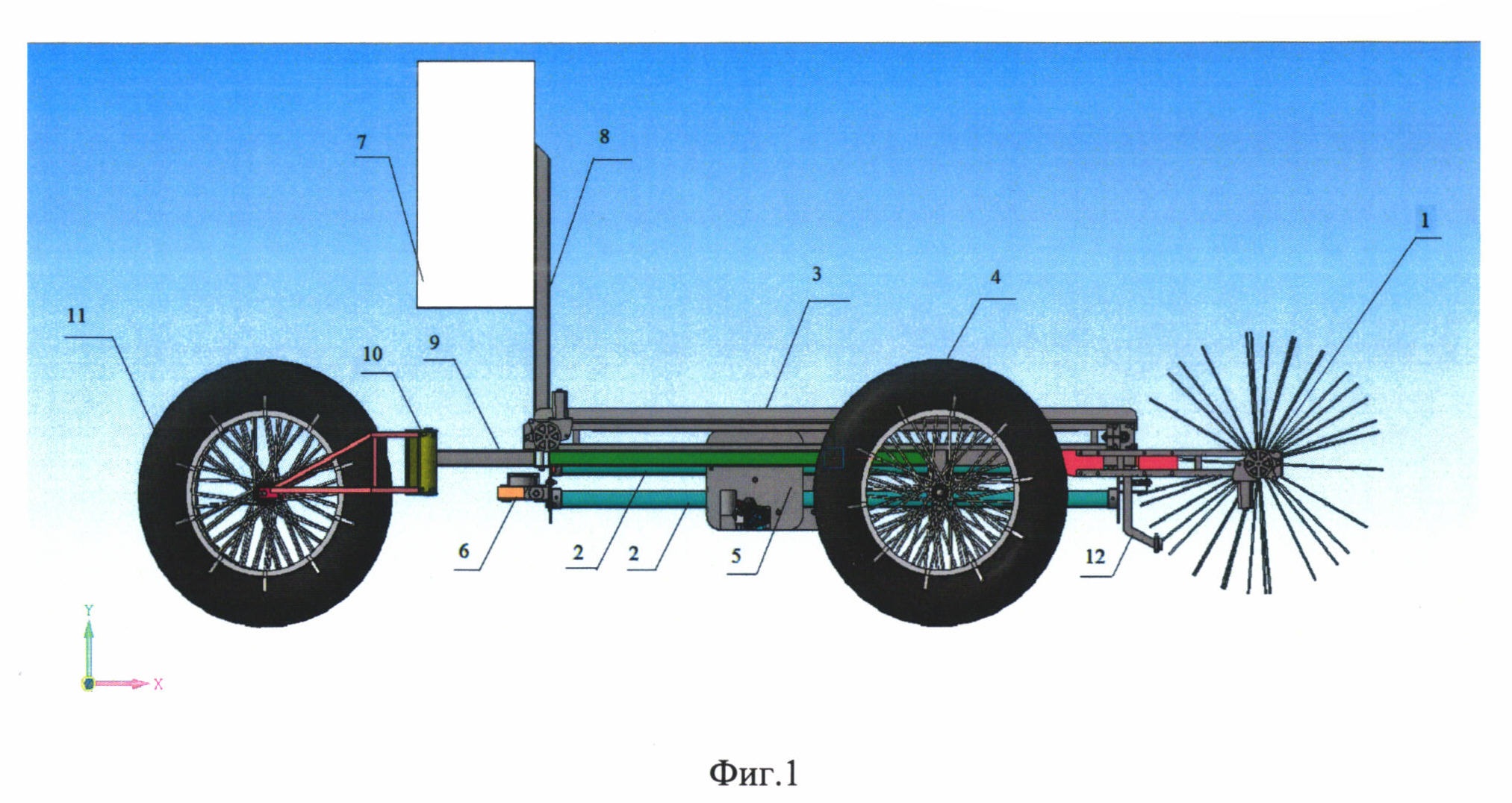
Уборочная секция и отдельные части конструкции сельскохозяйственного робота-комбайна представлены на фигурах 1-9.
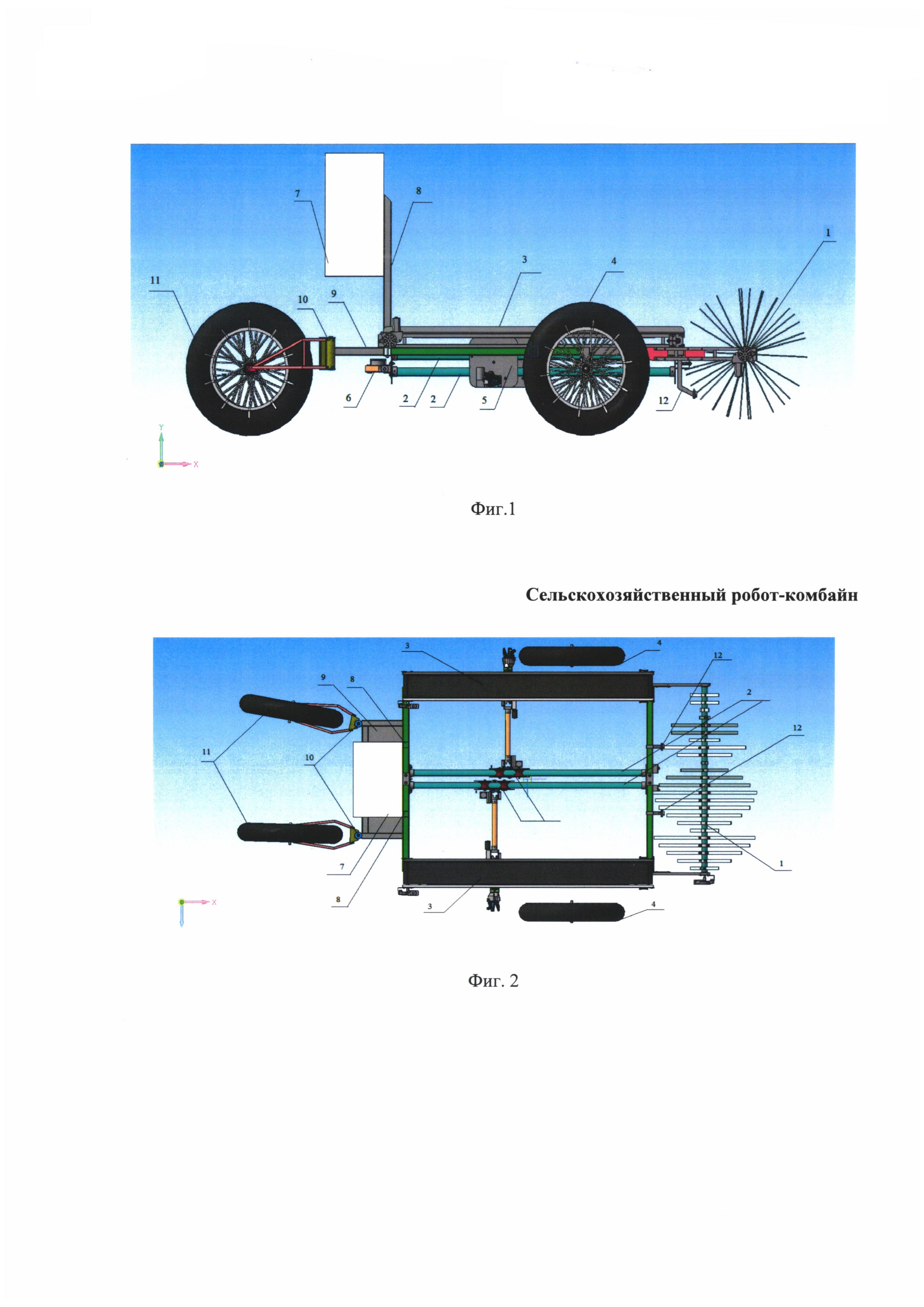
На фиг. 1 изображен вид сбоку самоходной уборочной секции сельскохозяйственного робота-комбайна, включающей: 1 - хедерный подъемник листвы; 2 - направляющие кареток; 3 - конвейеры; 4 - ведущее колесо; 5 - каретка манипулятора; 6 - приводы кареток, 7 - приборный отсек с электротехническим блоком; 8 - стойки для крепления приборного отсека; 9 - полка для приборов обслуживания и аккумуляторов; 10 - шарниры рычагов направляющих колес; 11 - направляющее свободновращающееся колесо; 12 - кронштейны для крепления сенсорной аппаратуры.
На фиг. 2 представлен вид сверху уборочной секции: 1 - хедерный подъемник листвы; 2 - направляющие кареток; 3 - конвейеры; 4 - ведущее колесо; 5 - каретка манипулятора; 6 - приводы кареток, 7 - приборный отсек с электротехническим блоком; 8 - стойки для крепления приборного отсека; 9 - полка для приборов обслуживания и аккумуляторов; 10 - шарниры рычагов направляющих колес; 11 - направляющее свободновращающееся колесо; 12 - кронштейны для крепления сенсорной аппаратуры.
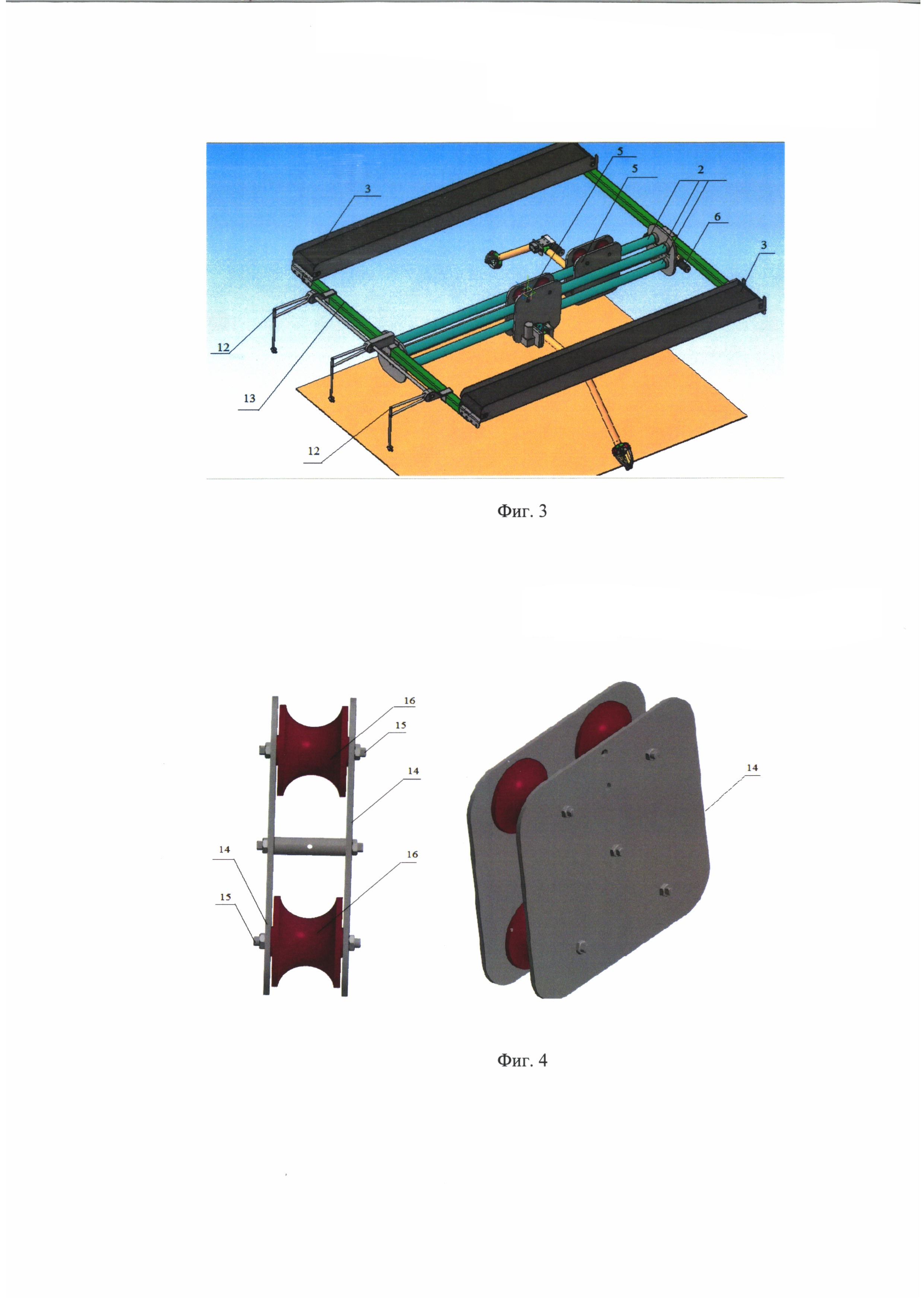
На фиг. 3 представлен примерный общий вид уборочной секции: 2 - направляющие кареток; 3 - конвейеры для подачи продукции в бункер; 5 - каретки с манипуляторами; 6 - приводы кареток; 13 - поперечная балка с кронштейнами для крепления сенсорной аппаратуры; 12 - кронштейны для крепления сенсорной аппаратуры.
На фиг. 4 представлен вид каретки манипулятора со свободно вращающимися опорными и направляющими роликами, 14 - панели для крепления роликов каретки; 15 - оси роликов; 16 - ролики.
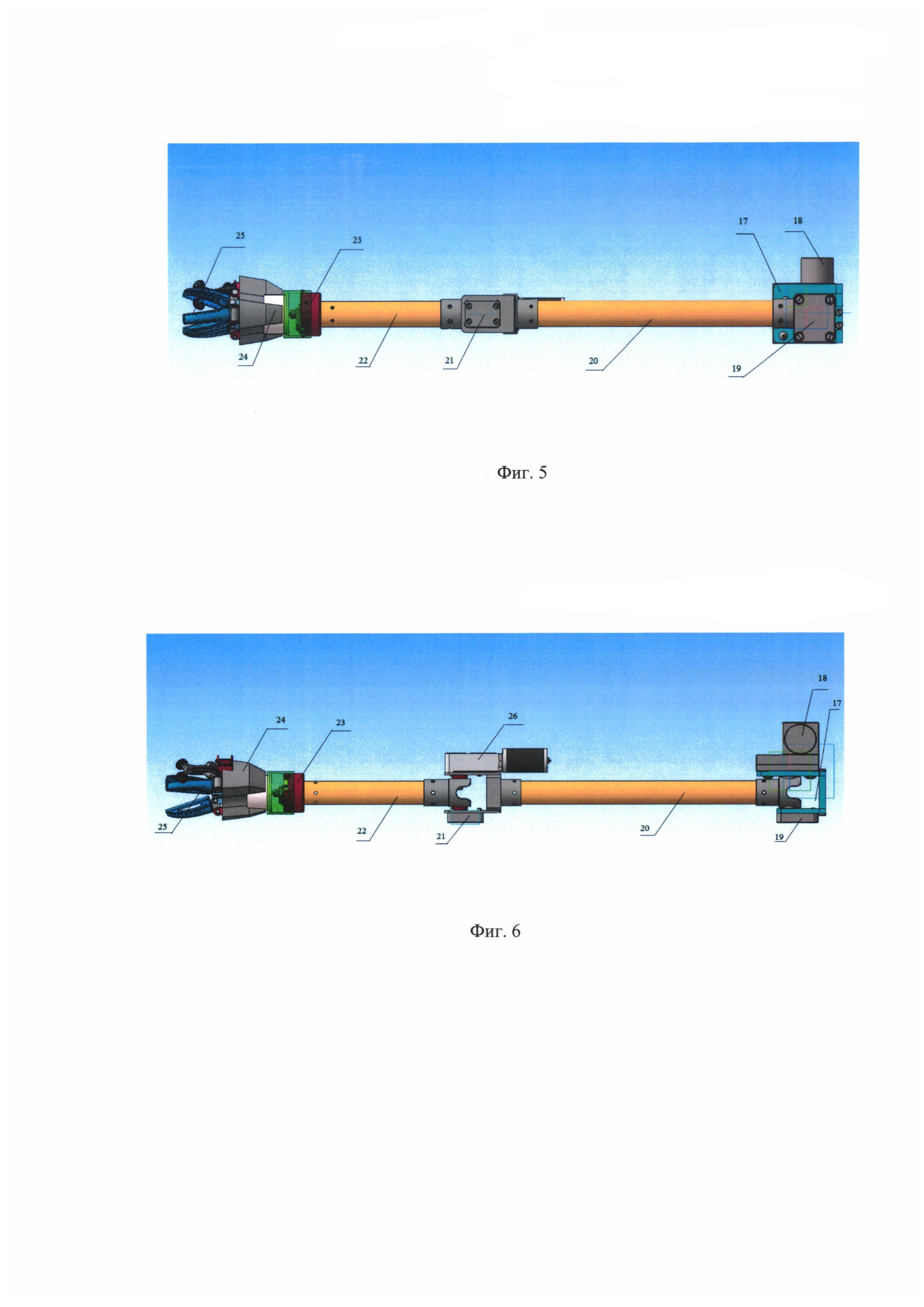
На фиг. 5 представлен трехзвенный манипулятор с одноосевыми шарнирами (вид слева): 17 - комлевый кронштейн манипулятора; 18 - мотор-редуктор привода комлевого шарнира; 19 - корпус энкодера комлевого шарнира; 20 - первое звено манипулятора; 21 - корпус энкодера шарнира между первым и вторым звеньями манипулятора; 22 - второе звено манипулятора; 23 - осевой шарнир схвата манипулятора; 24 - защитный чехол схвата манипулятора; 25 - захватное устройство схвата.
На фиг. 6 представлен манипулятор (вид снизу): 17 - комлевый кронштейн манипулятора; 18 - мотор-редуктор привода комлевого шарнира; 19 - корпус энкодера комлевого шарнира; 20 - первое звено манипулятора; 21 - корпус энкодера шарнира между первым и вторым звеньями манипулятора; 22 - второе звено манипулятора; 23 - осевой шарнир схвата манипулятора; 24 - защитный чехол схвата манипулятора; 25 - захватное устройство схвата; 26 - мотор-редуктор шарнира между первым и вторым звеньями манипулятора.
На фиг. 7 представлен манипулятора (вид сверху).
На фиг. 8 представлен общий вид схвата манипулятора в сборе с отделителем продукции и защитным кожухом: 23 - осевой шарнир схвата манипулятора; 24 - защитный чехол схвата манипулятора; 25 - захватное устройство схвата с эластичными оболочками; 27 - отделитель продукции.
На фиг. 9 представлен схват манипулятора в сборе с отделителем продукции и защитным кожухом (вид сбоку).
Сельскохозяйственный робот-комбайн для уборки урожая бахчевых и ягодных культур на открытом грунте в безлюдном режиме, состоящий из транспортной платформы со свободными и приведенными от двигателя колесными движителями, производственных секций с манипуляторами для отделения продукции от посадок, сортировочного устройства, бункера для собранной продукции, системы транспортировки продукции в сортировочное устройство, аппаратно-программного комплекса для сканирования посадок, навигационного и позиционирующего устройств, отличающийся тем, что сельскохозяйственный робот-комбайн снабжен съемным хедерным подъемником листвы растений в посадках, манипуляторы для отделения продукции от посадок выполнены трехзвенными, первое из звеньев соединено с комлевой частью конструкции манипулятора и со вторым звеном одноосевыми шарнирами с обеспечением локальных и частично региональных перемещений манипулятора, третье звено выполнено в виде схвата для фиксации продукции и соединено со вторым звеном вращательным шарниром с обеспечением ориентации схвата относительно продукции, а комлевая часть закреплена на каретке, перемещающейся от привода по расположенным на транспортной платформе вдоль направления движения комбайна направляющим и обеспечивающей глобальные и региональные перемещения манипулятора, фиксирующие продукцию элементы конструкции схвата снабжены оболочкой из псевдоэластичного материала, а программное обеспечение устройства управления роботом-комбайном дополнительно снабжено программой определения скорости сближения рабочих органов робота-комбайна с продукцией в посадках.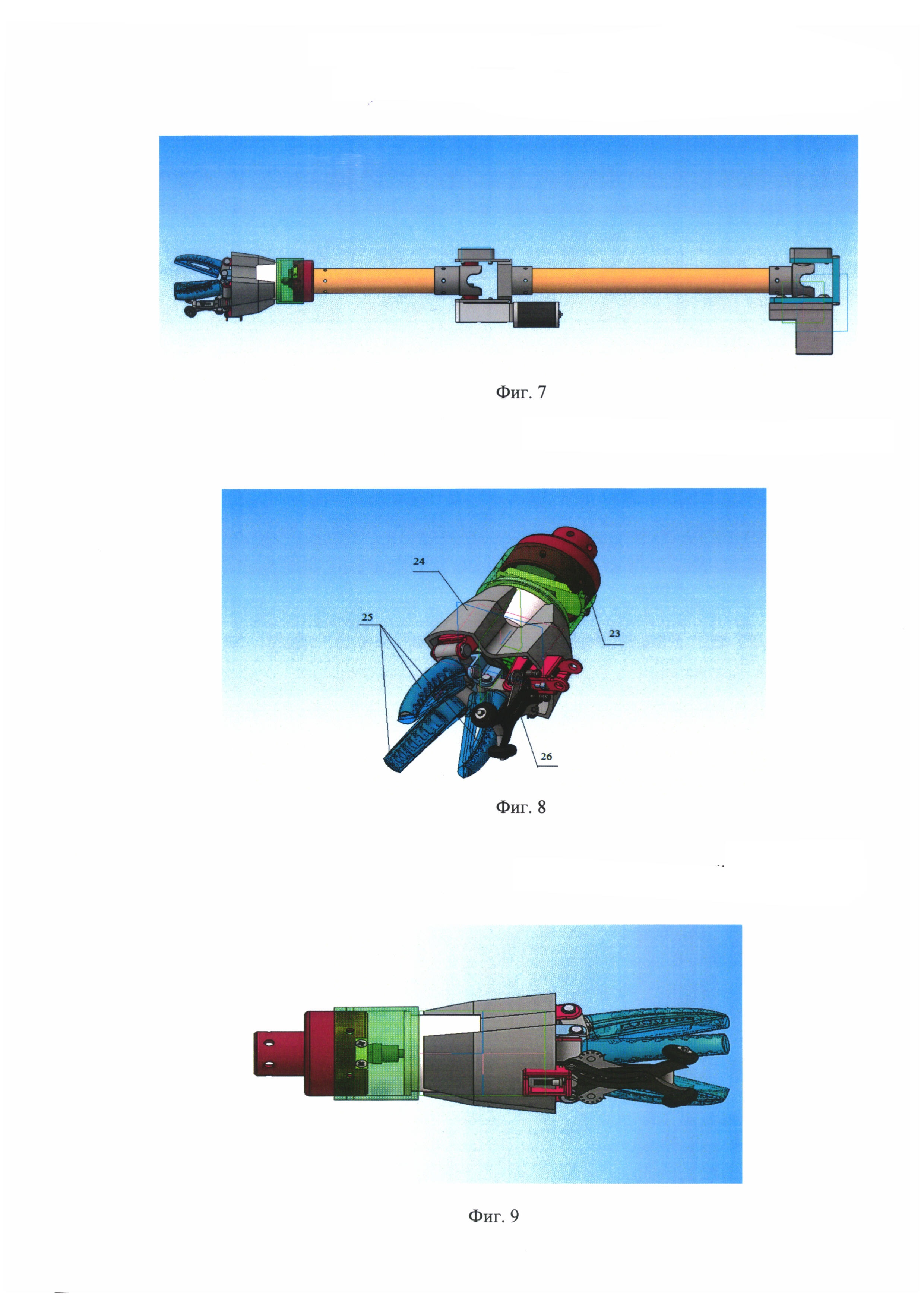
Автоматизированный комплекс устройств для ухода за плантацией растений и способ ухода за плантацией растений
Зуботехническая кювета
Робототехнический комплекс для автоматизированной авиационной химической обработки растений и способ его применения
Распылитель жидкости
Способ выращивания плодовых садов на склонах
Косилка для окашивания штамбов деревьев
Способ мульчирования сорной растительности
Способ мульчирования сорной растительности в горном террасном садоводстве
Устройство для гербицидной обработки приствольных полос многолетних насаждений
Способ снятия и перемещения гумусового слоя при террасировании горных склонов

