Результат интеллектуальной деятельности: АЛЬТИМЕТРИЧЕСКИЙ СПОСОБ ВЫПОЛНЕНИЯ МОРСКОЙ ВЫСОТОМЕТРИИ С ОПРЕДЕЛЕНИЕМ УКЛОНЕНИЯ ОТВЕСНОЙ ЛИНИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Предлагаемое изобретение относится к области радиотехнических измерений и может быть использовано для определения уклонений отвесной лини (УОЛ) и уточнения параметров вращения Земли и для решения других геодезических задач.
Известны способы и устройства определения УОЛ, основанные на астрономо-геодезических измерениях астрономических координат, посредством навигационных секстанов различного типа, астролябий, а также астролябий в сочетании с телевизионным датчиком, и последующих вычисления уклонения отвесной линии (авторское свидетельство SU №1760313А1, 07.09.1992; Практикум по высшей геодезии./ Под редакцией Н.В.Яковлева, М.: Недра, 1982. с.294-299; Прилепин М.Т., Голубев А.Н. Инструментальные методы геодезической рефрактометрии. - Итоги науки и техники. Геодезия и аэрофотосъемка. М. ВИНИТИ, 1979, Т.15.С.9, 29-30; Прилепин М.Т. Определение разности уклонений отвесных линий по наблюдениям в поляризованном свете. - Изв. вузов, сер. Геодезия и аэрофотосъемка. 1972, ВЫП.1.С.61-65. . 2; патент RU № 2120108С1, 10.10.1998; Б.Н. Красавцев, Мореходная астрономия, М., Транспорт, 1978 г., с. 123, 126, 288; Телескопы по ред. Дж. Койлера и Б. Миддлхерст, изд-во "Иностранная литература". -М. : 1963, с. 149-161; патент RU №2120108С1, 10.10.1998).
Существенным недостатком известных способов и устройств для определения УОЛ является то, что для обеспечения требуемой точности измерения необходимо производить за длительный промежуток времени, с неподвижного основания и за исключением высоких широт. Как известно, в призменной астролябии измерения высот звезд осуществляются строго на фиксированной высоте, по альмукантарату - это высота определена эталонным углом призмы. В качестве датчика горизонта используется ртутное зеркало, требующее неподвижного основания и заведомо непригодное даже при слабых динамических воздействиях на него. При совпадении высоты звезды с эталонным значением угла призмы происходит совпадение двух изображений звезды в астролябии и фиксируется время совпадения. Необходимость ждать момента точного совпадения изображений приводит к еще двум недостаткам призменной астролябии: низкому темпу измерений и непригодности для использования в высоких широтах, где совпадение может и вовсе не произойти, ибо звезды в высоких широтах движутся почти по альмукантарату. Кроме того, известные способы определения УОЛ отягощены многочисленными и трудоемкими вычислениями.
Известны также гравиметрические способы определения УОЛ, в океане на подвижном объекте в целях навигационно-гидрографического обеспечения (авторское свидетельство SU №1823661А1, 20.09.1995; патент RU № 2100594С1, 27.12. 1997; патент RU № 2348009С1, 27.02.2009), с использованием гравиметров. Известные гравиметрические способы определения УОЛ в океане имеют недостаточно высокую точность, так как при их использовании имеют место систематические и медленно меняющиеся погрешности измерений вторых производных гравитационного потенциала, которые невозможно определить, а, следовательно, и учесть на объекте.
Кроме того, известные гравиметрические способы определения УОЛ отягощены многочисленными и трудоемкими вычислениями.
Известны также лазерные измерители УОЛ и астрогеодезические комплексы для измерения УОЛ, в которых на стабилизированной в горизонте платформе размещают зенитный телескоп или зенитный телескоп в сочетании с телекамерой и акселерометрами (патент RU №2699907С1, 11.09.2019; заявка RU №2014119476 A, 20.12.2015; авторское свидетельство SU №718701 A, 28.02.1980; патент CN № 103852880 A, 11.06.2014; патент RU № 2343418 C1, 10.01.2009; патент US №5112126 A1, 12.05.1992 ; патент RU № 2545311 C1, 27.03.2015 )
Недостатком лазерных измерителей является измерение отклонения отвесной линии от ее среднего по площади района полевых работ.
Астрогеодезические комплексы при работе качающемся основании имеют низкую точность.
Свободны от этого недостатка системы с цифровым зенитным телескопом. Они устанавливаются на неподвижное основание. Рядом с ними или внутри их корпуса устанавливается устройство для определения местной вертикали (уровень, автоколлиматор с жидким зеркалом, теодолит и т.д.). В результате в одной точке и одновременно определяют зенитные расстояния светил в астрономической и геодезической системах координат. Их недостатком является низкая точность при работе на качающемся основании.
Для устранения этого недостатка используют судовой астрогеодезический комплекс (Патент RU №2699907С1, 11.09.2019), в котором на стабилизированной в горизонте платформе размещают зенитный телескоп с телекамерой и двумя жестко установленными относительно нее ортогональными горизонтальными акселерометрами. После двойного интегрирования показаний акселерометров определяют приращение координат места установки зенитного телескопа, сравнивают это приращение с приращением, полученным от спутниковой навигационной системы, и вычисляют УОЛ. Недостатками комплекса является отсутствие устройства для определения астрономической вертикали в точке проведения работ. Погрешность акселерометров в такой системе является основной погрешностью в определении УОЛ. Кроме того, гиростабилизатор обладает значительными габаритами и весом. Установка непосредственно на зенитный комплекс абсолютного гравиметра для повышения точности и мобильности системы определения УОЛ на подвижном основании не в полной мере приводит к достижению положительного технического результата из–за увеличения необходимых вычислительных операций. Кроме того, существенно увеличиваются массогабаритные характеристики, что ограничивает широкое применение данного устройства. Общим недостатком известных технических решений по определению УОЛ является низкая производительность съемки.
Анализ технического уровня в области измерения составляющих УОЛ в акваториях морей и океанов, в том числе в приполюсных районах, показал, что для решения поставленной задачи традиционно используются три основных метода:
астрономо-геодезический, в том числе с проведением измерений со льда;
гравиметрический, проведением площадной гравиметрической съемки судами и самолетами;
альтиметрический, проведением радиолокационных измерений высоты уровневой поверхности океана с искусственных спутников Земли.
Эти методы затруднительно и дорого реализовать на больших площадях акваторий, особенно в приполюсных районах.
В Российской Федерации успешно используются различные типы отечественных и зарубежных образцов навигационной аппаратуры потребителей (НАП) глобальных навигационных спутниковых систем (ГНСС) типа ГЛОНАСС и GPS. Проведенные предварительные исследования в области использования современных НАП показали принципиальную возможность их использования для измерения составляющих УОЛ. Для этого в самолетной НАП предлагается производить фазовые измерения и сравнение параметров прямых и отраженных от морской поверхности сигналов ГНСС.
Анализ выполнения полетов по кроссполярным маршрутам (официальный Интернет-ресурс Федерального агентства воздушного транспорта: rusavia @scaa.ru) показал, что за январь – декабрь 2018 года было выполнено 18 672 полета, а за январь – февраль 2019 года было выполнено 3088 полетов.
Наиболее близким из известных аналогов к заявляемому техническому решению в части конструктивных элементов является техническое решение, описание которого приведено в патенте US №6549165В2, 15.04.2003.
Известный способ выполнения высотометрии Земли, включает этапы: приема восходящей антенной (антенной с диаграммой направленности вверх) на борту платформы над поверхностью Земли прямых сигналов, имеющих по меньшей мере две разные несущие частоты, передаваемых спутниками GPS с учетом антенны с диаграммой направленности вверх, приема нисходящей антенной (с диаграммой направленности вниз) на борту платформы сигналов, отраженных поверхностью Земли и имеющих по меньшей мере две разные несущие частоты, сравнения несущих фаз прямых сигналов и принятых отраженных сигналов на несущих частотах, и определения от сравнений участка высоты поверхности.
При этом приемник согласно изобретению содержит направленную вверх антенну или ориентированную по оси Зенита, а также направленную вниз антенну или ориентированную по оси Надира и блок обработки сигналов. Антенна с диаграммой направленности вверх предназначена для приема сигналов, передаваемых непосредственно спутниками навигационной системы ГНСС (Global Navigation Satellite System), таких как глобальная система позиционирования, в то время как антенна с диаграммой направленности вниз, которая обычно может быть более ориентированной, чем антенна с диаграммой направленности вверх, предназначена для приема сигналов, передаваемых спутниками ГНСС, которые отражаются поверхностью Земли, и в частности поверхностью океана.
Обе антенны предназначены для приема как правой, так и левой круговой поляризации (LHCP и RHCP).
Блок обработки сигналов содержит приемник, к которому прикладываются сигналы, принятые восходящей антенной, для определения по сигналам, передаваемым спутниками ГНСС, векторов времени T, Временного положения P WGS-84 и временной дрейфовой скорости V, соответствующих соответственно текущему времени, положению и скорости приемника.
Приемник ГНСС принимает по меньшей мере два сигнала, имеющих разные несущие частоты, и предпочтительно три различных сигнала, имеющих соответствующие несущие частоты L1, L2, L5. Для достижения оптимальной производительности соответствующие частоты принимаемых сигналов должны быть надлежащим образом разнесены, причем две несущие частоты расположены близко друг к другу (L2 и L5), а третья несущая частота (L1) находится дальше от двух первых. Например, эти частоты следующие: L1=1575 МГц, L2=1227 МГц и L5=1176 МГц. Эти сигналы принимаются с обеих круговых поляризаций и каждый циркулярно поляризованный сигнал обрабатывается отдельно в приемнике ГНСС.
Задачей предлагаемого технического решения является расширение функциональных возможностей в части определения УОЛ с одновременным повышением производительности съемки при выполнении высотометрии Земли над водной поверхностью.
Поставленная задача решается за счет того, что в способе выполнения океанской высотометрии, включающем этапы: приема антенной с диаграммой направленности вверх на борту подвижной платформы (самолета, аэростата) над поверхностью Земли прямых сигналов, имеющих по меньшей мере две разные несущие частоты, передаваемых спутниками ГНСС, приема антенной с диаграммой направленности вниз на борту платформы сигналов, отраженных водной поверхностью Земли и имеющих по меньшей мере две разные несущие частоты, сравнения несущих фаз принятых прямых сигналов и отраженных сигналов на несущих частотах, и определение от сравнений участка высоту поверхности, при определении высоты поверхности вычисляют геодезические координаты нижней антенны (φо, λо, Hо) со смещением, обусловленным наклоном отражающей морской поверхности относительно референц-эллипсоида по формуле (φо, λо, Hо) = (φг, λг, -Hг), где φг, λг, Hг – широта, долгота и высота верхней антенны подвижной платформы, при этом приемники передаваемых спутниками сигналов ГНСС устанавливают на n самолетах, пересекающих воздушное пространство над акваторией, по вычисленным геодезическим координатам подвижной платформы значения проекций УОЛ по широте и долготе (УОЛφ, УОЛλ) с вычисляют по формулам:
УОЛφ = ΔSφ /2Н = Δφ М /2Н,
УОЛλ = ΔSλ /2Н = Δλ N /2Н,
где N, M – радиусы кривизны нормального сечения и меридиана референц – эллипсоида;
Δφ, Δλ – разности геодезических координат по данным обеих антенн, при этом исключают ионосферную погрешность путем обработки спутниковой навигационной информации методом Precise Point Position, дополнительно размещают в регионе опорные станции для измерения эфемеридных погрешностей и погрешностей расхождения шкал времени.
Поставленная задача решается также за счет того, что в бортовое устройство для выполнения океанской альтиметрии, содержащее: направленную вверх антенну на борту платформы для приема прямых сигналов, имеющих по меньшей мере две несущие частоты от рассматриваемых спутников ГНСС, направленную вниз антенну на борту указанной платформы для приема сигналов, имеющих по меньшей мере две несущие частоты, причем указанные принятые сигналы передаются каждым из указанных спутников ГНСС и отражаются отводной поверхности Земли, приемник ГНСС, соединенный с указанной направленной вверх антенной для подачи прямых сигналов, имеющих по меньшей мере две несущие частоты, частотный демультиплексор, подключенный к указанной нисходящей антенне, для разделения принятых отраженных сигналов на отраженные сигналы, имеющие соответственно указанные по меньшей мере две несущие частоты, средства сравнения фаз несущих указанных прямых сигналов, выводимых указанным приемником ГНСС, и отраженных сигналов, выводимых указанным частотным демультиплексором на указанных по меньшей мере двух несущих частотах, и средства определения высоты поверхности из фазовых сравнений, выполняемых указанным средством сравнения фаз введены персональный компьютер и блок для измерения эфемеридных погрешностей и погрешностей расхождения шкал времени, который своим входом информационно связан с опорными станциями для измерения эфемеридных погрешностей и погрешностей расхождения шкал времени, а своим выходом соединен с входом персонального компьютера.
Сущность предлагаемого технического решения поясняется чертежами (фиг. 1,2).
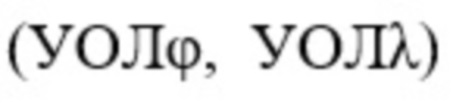
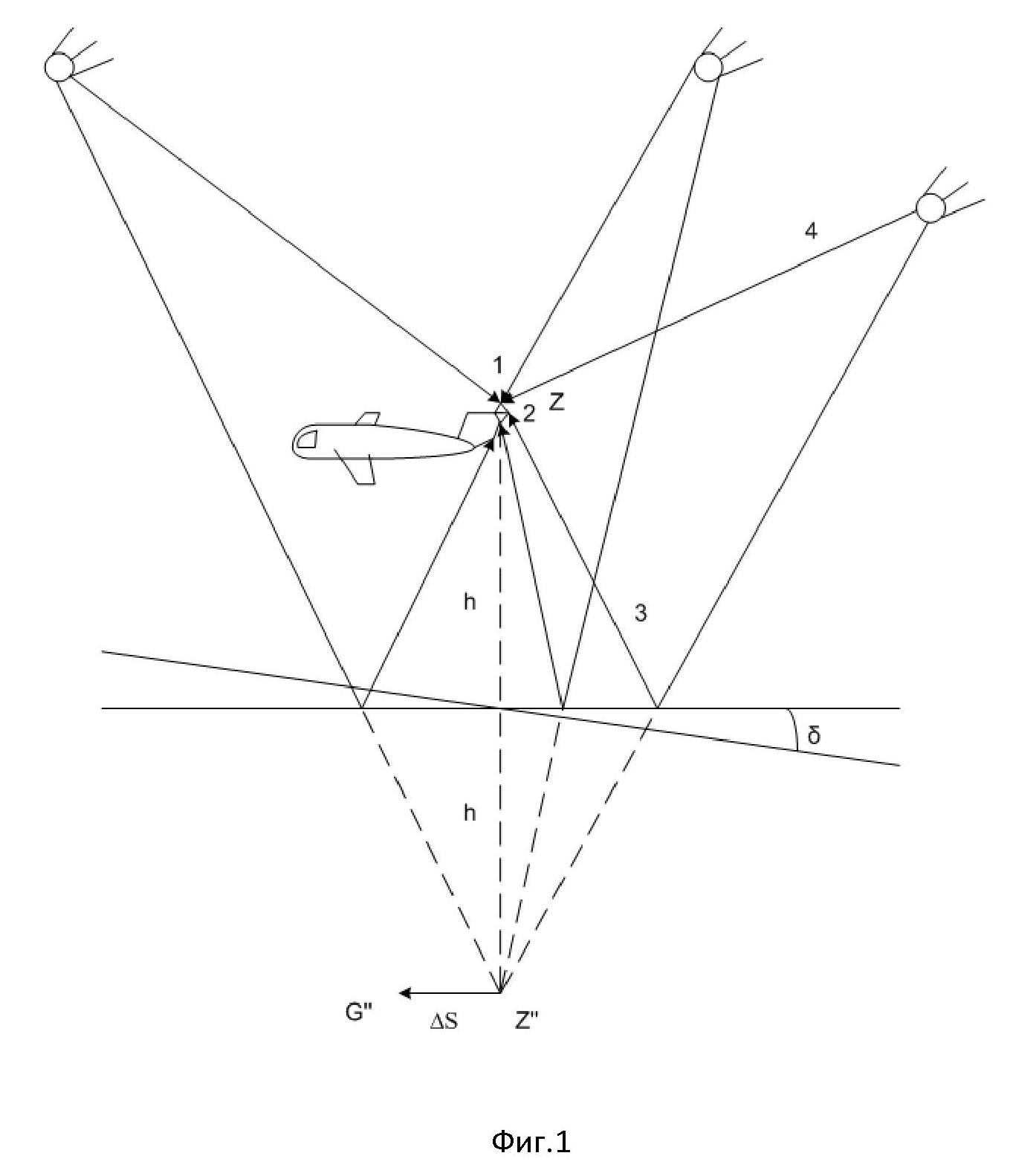
Фиг. 1. Схема измерения параметров УОЛ: 1, 2 – приемные антенны бортового спутникового приемника с диаграммами направленности в верхней и нижней полусферах; 3, 4 – отраженные от морской поверхности и прямые сигналы навигационного космического аппарата (НКА) ГНСС; ΔS – смещение под влиянием УОЛ обсервованного места по отраженным от морской поверхности сигналам антенны 2 относительно зеркально отраженного от поверхности референц – эллипсоида обсервованного места по сигналам антенны 1.
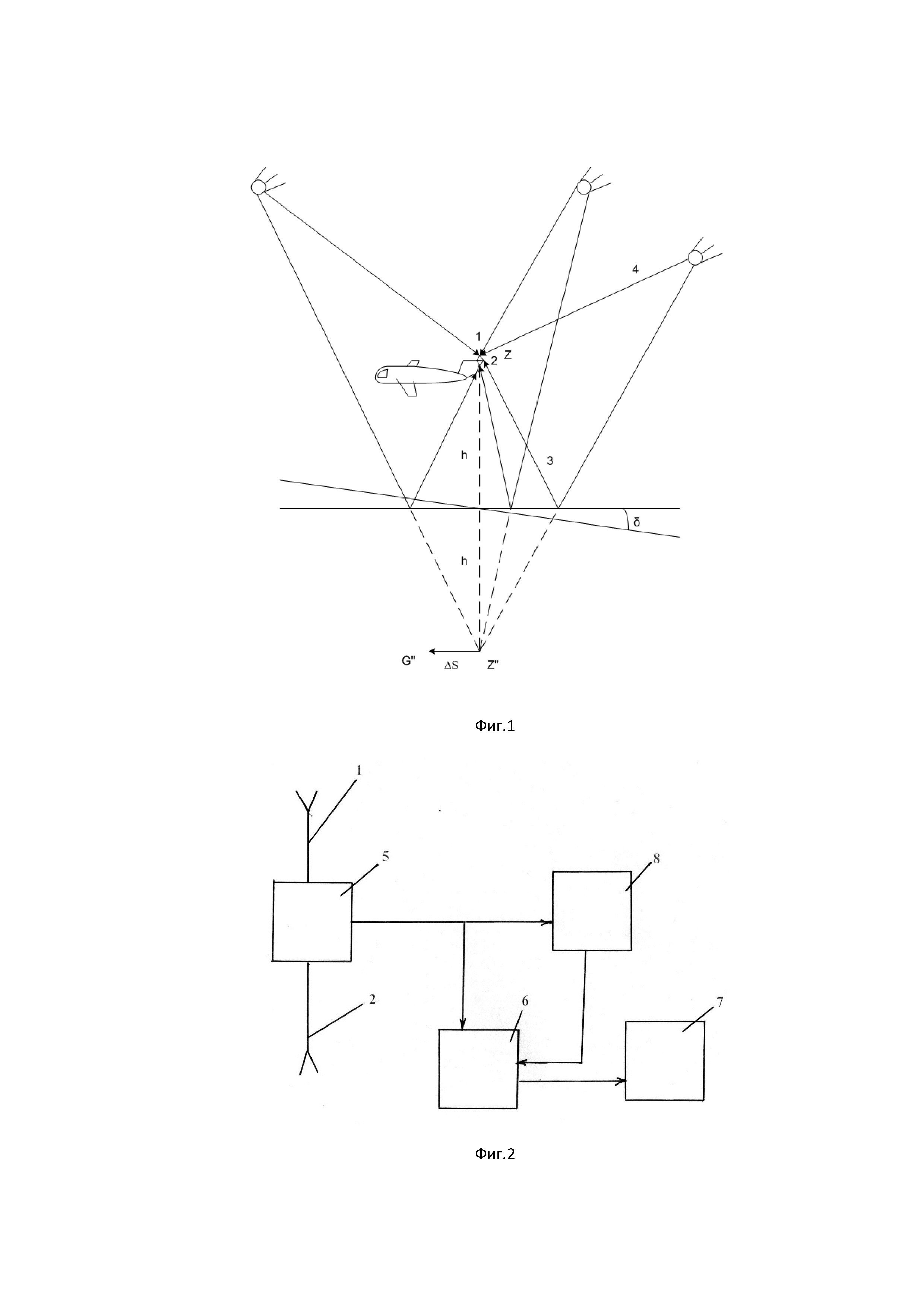
Фиг.2. Блок- схема устройства для реализации способа. Блок-схема устройства включает приемные антенны 1, 2 бортового спутникового приемника 5, блока 6 для измерения эфемеридных погрешностей и погрешностей расхождения шкал времени, персонального компьютера 7 со специальным программным обеспечением для записи, хранения и обработки результатов измерений.
Рассмотрим схему измерений параметров УОЛ, приведенную на фиг. 1. На самолете, летящем на высоте Н над морской поверхностью, бортовой спутниковый приемник 3 синхронно решает задачу определения координат:
- с помощью антенны 1 с диаграммой направленности в верхней полусфере. При этом бортовой спутниковый приемник 5 по измерениям параметров прямых сигналов от навигационных космических аппаратов вычисляет геодезические координаты антенны 1 (φг, λг, Hг);
- с помощью антенны 2 с диаграммой направленности в нижней полусфере. При этом бортовой спутниковый приемник по измерениям параметров отраженных сигналов от НКА вычисляет геодезические координаты антенны (φо, λо, Hо) со смещением, обусловленным наклоном отражающей морской поверхности относительно референц-эллипсоида.
Рассмотрим некоторые частные случаи, считая для простоты, что координаты фазовых центров приема антенн 1, 2 совпадают.
1. Морская поверхность в первом приближении совпадает с поверхностью референц-эллипсоида и является отражающим плоским зеркалом. В этом случае, для каждого НКА за счет отражения от морской поверхности увеличивается путь 3 прохождения отраженного сигнала до антенны 2 относительно пути 4 прямого сигнала до антенны 1. По законам геометрической оптики измеренные бортовым спутниковым приемником 5 координаты антенны 2 (т. Z”) будут зеркальным отражением относительно плоскости геоида измеренных НАП координат антенны 1 (т. Z). Так как в рассматриваемом случае поверхность геоида совпадает с поверхностью референц-эллипсоида, то (φо, λо, Hо) = (φг, λг, -Hг), где φ, λ, H – широта, долгота и высота антенны самолета – измерителя УОЛ.
Таким образом, при совпадении морской поверхности (геоида) с поверхностью референц-эллипсоида (то есть при нулевом значении УОЛ), вычисленные в бортовом спутниковом приемнике 3 оценки геодезических координат (φ, λ) по измерениям прямых и отраженных координат совпадают, значения высоты Н – равны, но противоположны по знаку.
2. Морская поверхность наклонена относительно поверхности референц-эллипсоида на угол δ и близка по высоте к поверхности референц-эллипсоида. Аналогично по законам геометрической оптики, измеренные бортовым спутниковым приемником 3 координаты антенны 2 (т. G”) будут зеркальным отражением относительно плоскости геоида измеренных бортовым спутниковым приемником 5 координат антенны 1 (т. Z). Так как в рассматриваемом случае поверхность геоида развернута относительно поверхности референц-эллипсоида на угол δ, то будет наблюдаться смещение т. G” относительно т. Z” на величину ΔS. Значение ΔS нетрудно найти из треугольника ZZ”G” с учетом малости угла δ:
ΔS = 2Н sinδ = 2Н δ. (1)
Например, при Н = 10 км = 1000000 см, Δ = 1” = 1/206280,
имеем из формулы (1) ΔS = 2000000/206280 = 10 см.
Поскольку антенна 1 и антенна 2 на самолете могут быть размещены близко друг к другу, а разности высот точек Z и Z” не превышают 20 км, то при работе бортового спутникового приемника 3 в фазовом дифференциальном режиме, по опыту использования геодезических приемников системы ГЛОНАСС, возможно измерение относительных координат точек Z” и G” (то есть смещения ΔS) с инструментальными погрешностями в единицы см. Тогда с учетом ранее приведенных численных оценок, имеется принципиальная возможность измерения УОЛ предлагаемым методом с инструментальной погрешностью в доли угл. сек.
3. Для случая выработки НАП геодезических координат самолета значения проекций УОЛ по широте и долготе (УОЛφ, УОЛλ) с учетом формулы (1) можно рассчитать по формулам:
УОЛφ = ΔSφ /2Н = Δφ М /2Н, (2)
УОЛλ = ΔSλ /2Н = Δλ N /2Н, (3)
где N, M – радиусы кривизны нормального сечения и меридиана референц – эллипсоида;
Δφ, Δλ – разности геодезических координат по данным обеих антенн
Таким образом, показана целесообразность измерения параметров УОЛ с помощью бортового спутникового приемника и двух приемных антенн, работающих по прямым и отраженным от морской поверхности сигналам НКА.
Самолетный радиоизмерительный комплекс составляющих УОЛ состоит из двух приемных антенн 1, 2 с диаграммами направленности в верхней и нижней полусферах, бортового спутникового приемника 5, который выполнен с улучшенными характеристиками чувствительности и помехоустойчивости, блока 6 для измерения эфемеридных погрешностей и погрешностей расхождения шкал времени, который своим входом информационно связан с опорными станциями для измерения эфемеридных погрешностей и погрешностей расхождения шкал времени, а своим выходом соединен с входом персонального компьютера 7 со специальным программным обеспечением для записи, хранения и обработки результатов измерений. Поправки к эфемеридам (орбитам) спутников и времени излучения их сигналов могут приниматься из сети Интернет или при помощи GSM – модема 8 соответственно антеннами 1 и 2, и через приемник 5 поступать на GSM – модем 8. Отсутствие в измерительном комплексе дорогих гироскопических и гравиметрических приборов обеспечит его стоимость, сравнимую со стоимостью комплекта геодезического приемника системы ГЛОНАСС (не более 1,9 млн руб. за комплекс), в то же время использование высокоточных фазовых измерений обеспечит измерение составляющих УОЛ с предельной инструментальной погрешностью не более 1 угл. сек. Размещение радиоизмерительного комплекса на самолетах обеспечит производительность съемки УОЛ до 10 тыс. кв. км/ч и не потребует доработки самолетов, так как масса комплекса не превысит 30 кг при энергопотреблении не более 50 Вт. Конструкция приемника и алгоритмы обработки принятых отраженных сигналов могут быть реализованы, как и в прототипе. В отличие от прототипа при обработке принятых отраженных сигналов при определении высоты поверхности вычисляют геодезические координаты антенны (φо, λо, Hо) со смещением, обусловленным наклоном отражающей морской поверхности относительно референц-эллипсоида по формуле
(φо, λо, Hо) = (φг, λг, -Hг),
где φ, λ, H – широта, долгота и высота антенны самолета,
при этом приемники передаваемых спутниками сигналов ГНСС устанавливают на n самолетах, пересекающих водную поверхность региона, по вычисленным геодезическим координатам самолета значения проекций УОЛ по широте и долготе (УОЛφ, УОЛλ) с вычисляют по формулам:
УОЛφ = ΔSφ /2Н = Δφ М /2Н,
УОЛλ = ΔSλ /2Н = Δλ N /2Н,
где N, M – радиусы кривизны нормального сечения и меридиана референц – эллипсоида;
Δφ, Δλ – разности геодезических координат по данным обеих антенн, при этом исключают ионосферную погрешность путем обработки спутниковой навигационной информации методом Precise Point Position, дополнительно размещают в регионе опорные станции для измерения эфемеридных погрешностей и погрешностей расхождения шкал времени.
Метод обработки спутниковой навигационной информации, называемый РРР (Precise Point Position) использует кодовые измерения дальности. В режиме РРР двух частотный приемник исключает ионосферную погрешность, а опорные станции служат для измерения эфемеридных погрешностей и расхождения шкал времени. На основе измеренных данных сети опорных станций ГНСС в центре обработки данных уточняется действительное положение спутников ГНСС на орбитах и формируются поправки к бортовым спутниковым эфемеридам и расхождению системных шкал времени. При этом точность определения близка к фазовым измерениям дальности и равна примерно 2-3см. Поправки к эфемеридам (орбитам) спутников и времени излучения их сигналов могут приниматься из сети Интернет или при помощи GSM – модема 8.
При скорости полета самолета V = 300 – 800 км/час и высоте полета самолета H = 2 – 10 км, диаметр зоны отражения сигналов от морской поверхности составит D = (6 – 8) Н = 12 – 80 км. При этом производительность съемки УОЛ составит: Р = D V = 3600 – 64000 кв. км/час.
Исходя из изложенного, реализация предлагаемого нового и не имеющего мировых аналогов метода измерения составляющих УОЛ над морской поверхностью позволит создать карты УОЛ с большей точностью, в меньшие сроки и существенно дешевле, чем ныне использующимися методами, аналогично тому, как спутниковая геодезия производительнее и дешевле для потребителей, чем традиционные геодезические технологии.
Описанные способ и устройство разработаны специалистами ФГБОУ ВО «Государственный университет морского и речного флота имени адмирала С.О. Макарова» в составе цикла научно-исследовательских работ. Были произведены расчеты оценки точности для районов океана, не покрытых льдами. Расчетным путем подтверждена эффективность применения заявленной группы изобретений.
Изложенное позволяет сделать вывод о соответствии заявляемой группы изобретений критерию «промышленная применимость».

Каскадный преобразователь частоты
Швартовое причальное устройство
Ограничитель грузоподъемности кранов с гибкой подвеской стрелы
Бесколлекторный электродвигатель
Способ определения неработоспособного генераторного агрегата
Габион для укрепления береговых откосов (варианты)
Лабораторная установка для моделирования речного потока
Способ определения неработоспособного генераторного агрегата
Швартовое причальное устройство
Индикатор напряжения
Способ геохимической разведки
Подвижный морской аппарат для подводных исследований
Способ подъема затонувшего судна и комплекс для подъема и транспортирования затонувших подводных лодок и других судов
Способ определения местоположения измеренных глубин звуковыми сигналами
Навигационный комплекс
Гидроакустическая синхронная дальномерная навигационная система для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических маяков-ответчиков
Интегрированный комплекс навигации и управления движением для автономных необитаемых подводных аппаратов
Способ регистрации сейсмических сигналов на акватории моря при поиске подводных залежей углеводородов
Способ определения предвестника землетрясения
Способ активной борьбы с айсберговой опасностью и устройство для активной борьбы с айсберговой опасностью

